Thermal Compensation Method for CMOS Digital Integrated Circuits
advertisement

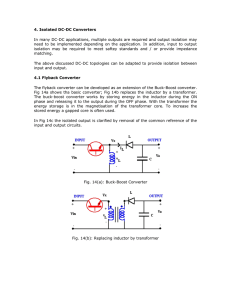
IEEE TRANSCATIONS ON CIRCUITS AND SYSTEM – II: EXPRESS BRIEF 1 Thermal Compensation Method for CMOS Digital Integrated Circuits Using TemperatureAdaptive DC-DC Converter Dongsheng Ma, Member, IEEE and Chuang Zhang, Member, IEEE Abstract—A cost-effective thermal compensation technique for CMOS digital integrated circuits (ICs) is proposed. The technique features a temperature-adaptive DC-DC converter, serving as both temperature detector and variable power supply. The converter adopts a delay-line based analog-to-digital (A/D) converter to translate temperature information into digital signals. By adjusting the output voltage, the DC-DC converter can help stabilize ICs’ operating frequency. The system was fabricated with a standard 1.5µm digital CMOS process. With a supply of 3.3V, the converter is capable of providing a variable supply voltage of 1.1 to 2.0V, with a maximum power efficiency of 92.1%. With this thermal compensation technique, temperature sensitivity of ICs is reduced from 4046 to 74ppm/°C within a temperature range of 0 to 110°C. Index Terms—thermal compensation, digital CMOS IC, adaptive DC-DC converter I. INTRODUCTION C URRENT CMOS IC design dominates digital IC market due to its low power and low cost. However, MOS transistor shows strong temperature dependence since both electrical mobility (µ) and threshold voltage (VT) are temperature-related [1]. This results in temperature variations in drain-to-source current (Ids) and thus propagation delay of logic gates. For example, in a typical CMOS ring oscillator, as the temperature varies, the oscillation frequency drifts accordingly, making the problems of jitter and phase noise [2]. Serious cases cause signal processing errors and even failure of operation. In terms of reliability, large temperature variation at “hot spots” can cause fatal damages on silicon chips. Hence, effective thermal compensation and power management are strongly demanded in VLSI systems. In recent years, several on-chip thermal compensation methods have been reported. In [3, 4], temperature variation is measured by a temperature-sensitive resistor, and then digitized by a high precise A/D converter. Thermal effect is compensated by adjusting temperature coefficients stored in memory circuits. Finally, a D/A converter changes error correction information into analog voltage/current signals for temperature compensation. In [5], a delay-locked loop (DLL) is proposed, consisting of charge pump, phase detector, clock synthesizer and one tunable VCO. The VCO incorporates a series of current mirror circuits and trimming resistors for frequency tuning. Power consumption by synthesizer itself has been above 57mW. The designs require complex analog circuit blocks such as A/D converters, with large power dissipation and chip area. In this paper, a cost-effective thermal compensation method for CMOS digital ICs is proposed [6]. First, a delay-line based digital A/D converter was employed as temperature detector. Variations of operating frequency due to temperature and process variations is minimized by adaptively adjusting the power supply of digital circuits, which is implemented by an adaptive-output DC-DC converter. The converter also controls power flows in the entire IC and helps maintain the temperature at desired level, which was not discussed in aforementioned prior arts. The rest of this paper is organized as follows. Section II depicts the design and operation of the proposed thermal compensation system. Experimental results are addressed in Section III to verify the design validity and to evaluate the performance. We then conclude our design efforts in Section IV. II. DESIGN OF THERMAL COMPENSATION SYSTEM A. System Architecture Vout Mp L Vg Cout Mn Power Stage Buffer Drive Power Flow Controller Load Power Meter Pulse-Width Generator Current Sensing Circuit Vdelay Digital Logic for Error Signal Computation Clk Delay Cell N Manuscript received April, 2005. This work was supported in part by U.S. National Science Foundation Center for Low Power Electronics. D. Ma is with Electrical and Computer Engineering Department, the University of Arizona, Tucson, AZ 85721, USA, (Tel: 520-621-8733, Fax: 520-621-8076, e-mail: ma@ece.arizona.edu). C. Zhang is with Micron Technology Texas, LLC, Allen, TX 75013 USA, (e-mail: czhang@yahoo.com). CMOS Digital ICs Temperature Detection & Compensation Delay Cell 2 Delay Cell 1 Fig. 1 Block diagram of proposed thermal compensation system Fig. 1 shows the block diagram of the proposed thermal compensation system, including a power stage, a power flow IEEE TRANSCATIONS ON CIRCUITS AND SYSTEM – II: EXPRESS BRIEF controller and a temperature detection and compensation unit. The power stage of the DC-DC converter adopts conventional buck topology to convert an external power source of 3.3V into a variable power supply. Synchronous rectification is implemented for low power and high efficiency. The stage is regulated by a power flow controller including a load power sensor, a current sensing circuit and a pulse-frequency modulation (PFM) generator. 2 t total = 2 Nt N Power PMOS Sensing PMOS − M5 inductor current iL M6 )2 , (1) 3 (2) VT (T ) = VT (T0 ) − α (T − T0 ), Vcon (from buffer drive) M3 2 NKV out µ (V out − V T µ = K µT 2 , 1 M4 = where td is the delay of each inverter stage, VT is threshold voltage, K is a constant parameter for a given MOSFET and µ is equivalent mobility of MOSFET. Here, the mobility µ and threshold voltage VT are temperature dependent [9, 10], which can be approximated by the expressions (2) and (3), respectively. Vdd ibias d (3) where α is temperature coefficient, determined by the substrate doping level and the implant dose during the fabrication. In this design, α is approximately 3.2mV/°C. By combing (1), (2) and (3), we have 3 M1 Mbias M2 ttotal sensing current isense By taking ∂ttotal ∂T Fig. 2 Schematic of on-chip current sensing circuit The load power sensor is to monitor instant power demand from the load (digital IC). As the load varies, the duty ratio of the converter varies accordingly to maintain the output voltage at the desired level. Current sensing circuit used here is an improved version of [7, 8], mainly performing on-chip current sensing and over-current protection. The details of the circuit are illustrated in Fig. 2. Instead of employing traditional series sensing resistor to detect the inductor current (iL), on-line transistor current scaling technique is applied. The transistors M1∼M4 form a voltage mirror to bias the sensing PMOS and power PMOS transistor with the same DC conditions. The current flowing through the sensing transistor is thus linearly proportional to the inductor current. Because the ratio of the two transistors N (= (W L )Power (W L )sen sin g ) is very large, (N is 2000 in this design), the current sensing circuit thus consumes much less power than the power stage. Temperature detection circuit consists of digital delay line and signal processing circuits. Note that the delay line is powered by the output of the DC-DC converter, Vout. Hence, its delay time can be adjusted by adjusting the level of Vout. Since the delay line circuit converts analog voltage Vout into the delay of digital circuits, it is also named as delay-line based A/D converter. Compared to traditional A/D converters, this circuit can be simply implemented with digital delay elements. Its operation will be discussed in Section II-B. Clearly, by transforming voltage signals into delay/frequency signals, this design requires much less silicon area than its analog counterparts with larger noise margins. B. Mechanism of Temperature Compensation Suppose that the delay line in Fig. 1 embraces 2N stages of inverters. Its delay time ttotal can be expressed as, =0 Vout T 2 2 NK = K µ (Vout − αT − VT (T0 ) + αT0 )2 (4) , we have 3 VoutT 2 ∂ttotal ∂ 2 NK |T =To = ( ) |T =To = 0. (5) ∂T ∂T K µ (Vout − αT − VT (T0 ) + αT0 )2 4 (6) Vdd _ opt = αTo + VTo . 3 Here, Vdd_opt is the boundary supply voltage, at which the delay of the circuit is temperature-independent. Eqn. (4) shows that, to keep the delay ttotal constant, we can always find a level for Vout to compensate the temperature variation. 1 Clk 0 1 Vdelay (1) 0 1 ttotal (1) 0 1 Error (1) 0 1 Vdelay (2) 0 1 ttotal (2) 0 1 Error (2) 0 1 Vdelay (3) 0 1 ttotal (3) 0 1 Error (3) 0 Fig. 3 Timing diagram of temperature compensation in three cases: (1) when the temperature is constant; (2) when the temperature is above the desired level; and (3) when the temperature is below the desired level. According to Eqn. 6, Vdd_opt is determined by the fabrication process. If the actual supply voltage Vdd is higher than it, the delay of the circuit exhibits positive temperature dependence. IEEE TRANSCATIONS ON CIRCUITS AND SYSTEM – II: EXPRESS BRIEF Otherwise, negative temperature dependence is observed. In this design, Vdd_opt is about 2.15V, and the desired supply voltage range for the loading circuits is from 1.1 to 2V. Thus, the delay of the circuits is negative temperature-dependent. To illustrate the mechanism of temperature compensation, Fig. 3 shows the timing diagram of temperature detection and compensation circuit under different temperature conditions. A temperature-independent reference clock ‘Clk’ (in Fig. 1) is applied at the input of the delay line. After a delay time of ttotal, the clock signal can be found at the output of the delay line. We name this signal as Vdelay to differentiate it from Clk. Obviously, ttotal follows Eqn. (4), which can be measured at the output of the phase detector in Fig. 4. Vdelay Phase Detector Clk Clk_H Error Frequency Counter Qm Qm-1 Qm-2 Q1 3 Ron, Mp C. Adaptive DC-DC Conversion with Dynamic Power Loss (DPL) Control ESRL Vout (0, DT) ESRC Vg Io C (a) L ESRL Vout ESRC Ron, Mn (DT, T) Vg Io C (b) Fig. 5 Equivalent circuit of the power stage: (a) when Mp is on, and (b) when Mn is on. In a DC-DC converter, power dissipation of power transistors and the parasitics in the power stage dominates the entire efficiency. One major power loss, conduction power loss, can be calculated based the two different modes shown in Fig. 5. The conduction loss is approximately equal to Fig. 4 Schematic of error signal generation To quantize the delay, the signal ttotal is modulated by a highfrequency clock signal Clk_H. As a result, the delay information is represented by m-bit binary data “QmQm-1...Q1”. If the temperature is stable, the measured delay should be a constant value as described in case (1) of Fig. 3. Here, the delay data is set to be “10000000” (m=8). If temperature rises, the delay ttotal decreases as in case (2) of Fig. 3. As a result, Qm…Q1 decreases. For instance, a “01111110” is detected by the frequency counter. The change of this binary data reflects the temperature variation. Error computation logic (Fig. 1) then sends the error information to PFM generator to reduce the duty ratio of the DC-DC converter. As results, less current will pass through the inductor L to the output of the converter. The output voltage Vout across the capacitor Cout then drops. Hence, the circuits including the load and the delay line are powered with a reduced supply voltage. The delay of the circuits returns to the original level. The circuit’s operating frequency is thus stabilized. In addition, because the power loss of digital circuits is proportional to Vdd2, the reduced Vdd leads to less power loss and thus less heat, helping decrease temperature. If temperature drops, the delay ttotal increases accordingly. The delay data thus increases as in case (3) of Fig. 3. For instance, a “10000011” may be detected at Qm…Q1. Accordingly, the converter’s duty ratio will be increased. Hence, more current will be delivered, and the output voltage Vout increases. Then, the circuits are powered with an increased supply voltage and the delay of the circuits returns to the original. Again, the increased Vdd leads to more power loss and helps raise the temperature until the system reaches the equilibrium. L PCond ≈ (DI o )2 µ p C ox (W L ) p (V g (1 − D ) 2 I o µ n C ox (W L )n (V g − VTn ) 2 − VTp ) + (7) + I o ESR L + ∆iC ESRC 2 2 Here, D is the duty ratio, Io is the output load current, ESRL and ESRC are equivalent series resistance of the inductor L and capacitor C, respectively. ∆iC is the averaged dynamic current of the capacitor C. The switching power loss is (8) PSW ≈ C ox ((WL ) p + (WL )n ) f S , where fS is the switching frequency of the converter. We ignore the power loss of short-circuit current and static power since they are usually much smaller and can be minimized through careful circuit design and layout [11, 12]. Hence the overall power loss in power stage is approximately equal to Ptotal ≈ PCond + PSW . (9) By taking ∂Ptotal ∂W p = 0 and ∂Ptotal ∂Wn = 0 , we can find the optimal size of the power transistors Mp and Mn. Vdd M4 M5 Hysteretic Comparator M6 isense Vcon f(iL) Counter M7 M1 M3 M2 Multiplier & Multiplexer C Temperature Detection Circuit G2 G1 G0 f(vo) Fig. 6 Schematic of power meter However, the power minimization technique above only works well for a converter with fixed load and output voltage level. Since the output voltage and current in this converter are both variable, the technique does not suffice. We thus propose dynamic power loss control with an on-chip power meter to achieve dynamic power transistor sizing. The power meter IEEE TRANSCATIONS ON CIRCUITS AND SYSTEM – II: EXPRESS BRIEF includes voltage and current meters and a digital multiplication circuit as shown in Fig. 6. As discussed in Section II-B, since the thermal compensation circuit can obtain the output voltage information, we only need to measure the current information at this moment. For the buck converter, the averaged inductor current is equal to the load current. The inductor current can be detected from the sensing current isense (=iL/N) in Fig. 2, and then copied by a current mirror in Fig. 6. Here, Vcon is the gate voltage on power transistor Mp in Fig. 2. When Mp is on, the inductor current is scaled and copied into M5 and M6 to charge up the capacitor Cm. When the voltage across Cm reaches a threshold voltage VH, the hysteretic comparator’s output flips. Obviously, the larger the inductor current, the faster Cm is charged up, leading to a larger number at the counter output. A digital multiplier then multiplies the detected current and voltage for power information. 4 III. EXPERIMENTAL RESULTS The proposed design was fabricated with a standard 1.5µm digital CMOS process. Fig. 8 shows the chip micrograph. Due to the compactness of the delay-line based digital controller, the active area is about 0.95mm2. The values of inductor and filtering capacitor in DC-DC converter are 4.7µH and 10µF, respectively. With an input voltage of 3.3V, the measured peak-to-peak output voltage ripple is less than 36mV. Fig. 9 shows the measured steadystate output voltage at 1.25V with reference to the inductor current. Efficiency of the DC-DC converter is measured and plotted in Fig. 10. Due to the proposed dynamic power loss control technique, the efficiency can be maintained above 70% over the entire output power range of 10 to 280mW, with a maximum efficiency of 92.1% at 125mW. Mn Vcon (from Pulse-Width Generator) buffer Mn7 Mn2 Mn1 G0G1G2 G0+G1+G2 buffer buffer Fig. 7 Power transistor with DPL control Fig. 9 Output of DC-DC converter with reference to the inductor current 100 95 90 85 Efficiency (%) The load power is divided into 8 levels according to its magnitude. The ‘sensed’ power is then compared to these predetermined levels and is represented by a 3-bit digital signal G2G1G0. Finally, the signal is applied to buffer drive to determine how many power transistors should be turned on in Fig. 7. If the converter is with full load, larger power transistor is preferred to reduce the conduction power loss PCond. “111” will be assigned to G2G1G0 to turn on all the transistors from Mn1 to Mn7. When the converter only drives a very light load, some transistors should be shut down to reduce the switching loss PSW. “000” will be given to only allow Mn1 to be on. The same scheme is also applied to power PMOS transistor. Accordingly, efficiency of the converter is optimized at 8 levels instead of one. 80 75 70 65 60 55 50 0 50 100 150 200 250 300 Load Power (mW) Fig. 10 Measured efficiency of the converter Fig. 8 Chip micrograph For thermal compensation test, we design 41-stage ring oscillator as the load of the DC-DC converter. Ring oscillator is a key component in signal processing and clock generating circuits. Its frequency stability is important issue as drift of target frequency increases jitter and causes instability of system. More importantly, delay line and ring oscillator are the most representative circuits of pipeline data-paths and sequential logics, respectively. The researches on these can be IEEE TRANSCATIONS ON CIRCUITS AND SYSTEM – II: EXPRESS BRIEF extended and applied into the general applications based on logical effort theory [13]. 5 stability. The design provides another solution to high performance thermal management on CMOS digital ICs. 2.5 ACKNOWLEDGMENT 2.4 2.3 The authors thank Paul A. Brokaw of Analog Devices Inc. for valuable discussions. Frequency (MHz) 2.2 2.1 REFERENCES 2 1.9 1.8 1.7 1.6 1.5 0 20 40 60 80 100 120 Temperature (degree) Fig. 11 Measured frequency variation versus temperature Temperature Coefficient (ppm/degree) 80 79 78 77 76 75 74 73 1 1.5 2 2.5 3 3.5 4 4.5 5 Frequency (MHz) Fig. 12 Measured temperature coefficients at targeted frequencies Fig. 11 shows measured results of frequency variation of a 41-stage ring oscillator with temperature. Without thermal compensation, the variation is around 7 KHz/°C or 4046 ppm/°C as shown in dash line. With the proposed thermal compensation, the frequency variation is reduced to 0.15 kHz/°C or 74 ppm/°C as shown in solid line. Temperature dependence of ring oscillator is significantly suppressed. Fig. 12 shows averaged temperature coefficient of various target frequencies generated by ring oscillators with different stages. The temperature coefficients at target frequencies of 1 to 5MHz are below 79.3 ppm/°C by successfully applying the proposed compensation method. IV. CONCLUSION This paper presents a new thermal compensation method by employing a temperature-adaptive DC-DC converter. Details on operation principle and circuit design techniques are discussed. An IC chip was successfully fabricated and tested to verify the design idea. The measurement results show significant improvement on digital circuits’ temperature [1] P. Allen and D. Holberg, CMOS Analog Circuit Design, Oxford University Press, 2002. [2] A. Hajimiri, S. Limotyrakis and T. Lee, “Jitter and phase noise in ring oscillators,” IEEE J. Solid-State Circuits, vol.34, pp.790804, June 1999. [3] R. Achenbach, M. Feuerstack-Raible, F. Hiller, M. Keller, K. Meier, H. Rudolph and R. Saur-Brosch, “A digitally temperature-compensated crystal oscillator”, IEEE J. of Solid State Circuits, vol. 35, pp.1502-1507, Oct. 2000. [4] W. Michael and D. Bogdan, Thermally Compensated Current Sensing of Intrinsic Power Converter Elements, U. S. Patent 2003038614. [5] D. Foley, M. Flynn, “CMOS DLL based 2V, 3.2ps jitter, 1GHz clock synthesizer and temperature compensated tunable oscillator,” IEEE Custom Integrated Circuits Conference, pp. 371-374, April 2000. [6] D. Ma, C. Zhang, Thermal Compensation Method for CMOS Digital Integrated Circuits Using Temperature-Adaptive Digital DC-DC Converter,” U. S Patent Series No. 60/657, 342, Feb. 28, 2005. [7] D. Ma, W-H Ki, C-Y Tsui, “A Pseudo-CCM / DCM SIMO switching converter with freewheel switching”, IEEE International Solid-State Circuit Conf. (ISSCC), Digest of Technical Papers, pp. 390-391, San Francisco, Feb. 2002. [8] D. Ma, W-H Ki, C-Y Tsui, “Single-inductor multiple-output switching converters with time multiplexing control in discontinuous conduction mode,” IEEE J. of Solid-State Circuits, vol. 38, pp. 89-100, Jan. 2003. [9] S. M. Sze, Physics of Semiconductor Devices, 2nd Edition, New York, Wiley, 1973. [10] R. A. Blauschild, et. al., “A New Temperature-Stable Voltage Reference,” IEEE J. Solid-State Circuits, no. 6, pp. 767-774, Dec. 1978. [11] T.D. Burd, T.A. Pering, A.J. Stratakos and R.W. Broderson, “A dynamic voltage scaled microprocessor system,” IEEE J. Solid State Circuits, vol. 35, pp. 1571-1580, Nov. 2000. [12] D. Ma, W-H Ki and C-Y Tsui, “An integrated one-cycle control buck converter with adaptive output and dual loops for output error correction,” IEEE J. Solid State Circuits, vol. 39, pp.140149. Jan. 2004. [13] Sutherland, B. Sproull and D. Harris, Logical Effort, Morgan Kaufmann, 1999.