Lecture Notes for the Course on
advertisement

Lecture Notes for the Course on
NUMERICAL METHODS FOR NUCLEAR REACTORS
Prof. WALTER AMBROSINI
University of Pisa, Italy
Unit-5 - Neutron Transport Theory Fundamentals
and Solution Methods – Part 1
NOTICE: These notes were prepared by Prof. Ambrosini mainly on the basis of the material adopted by Prof. Bruno
Montagnini for the lectures he held up to years ago, when he left to Prof. Ambrosini the charge of the course held for
the Degree in Nuclear Engineering at the University of Pisa. This material is freely distributed to Course attendees or to
anyone else requesting it. It has not the worth of a textbook and it is not intended to be an official publication. It was
conceived as the notes that the teacher himself would take of his own lectures in the paradoxical case he could be both
teacher and student at the same time (sometimes space and time stretch and fold in strange ways). It is also used as
slides to be projected during lectures to assure a minimum of uniform, constant quality lecturing, regardless of the
teacher’s good and bad days. As such, the material contains reference to classical textbooks and material whose direct
reading is warmly recommended to students for a more accurate understanding. In the attempt to make these notes as
original as feasible and reasonable, considering their purely educational purpose, most of the material has been
completely re-interpreted in the teacher’s own view and personal preferences about notation. In this effort, errors in
details may have been introduced which will be promptly corrected in further versions after discovery. Requests of
clarification, suggestions, complaints or even sharp judgements in relation to this material can be directly addressed to
Prof. Ambrosini at the e-mail address: walter.ambrosini@ing.unipi.it
NMNR-Unit-5 – Neutron Transport Theory Fundamentals and Solution Methods – Part 1
1/36
NMNR-Unit-5 – Neutron Transport Theory Fundamentals and Solution Methods – Part 1
2
CELL CALCULATIONS
General Considerations
• In heterogeneous reactors, materials are distributed in such a way
that the reactor core is constituted by arrays of elementary units
• The fuel elements or “assemblies” constitute a first unit whose
replication in different directions generates the entire core
• It is anyway more convenient to make reference to simpler
elementary units named “cells”
• Since the number and the detail of the calculations to be performed
are generally considerable, the cell must be described in such a way
that the geometry will be the simplest possible
♦ the height of the cell is generally considered very large with
respect to the radial dimensions, in order to accept results
obtained by 2D calculations
♦ square or hexagonal cells can be reduced to equivalent
cylindrical cells, obtained by preserving the volumes of the
various regions (Wigner-Seitz approximation)
NMNR-Unit-5 – Neutron Transport Theory Fundamentals and Solution Methods – Part 1
3
• Performing cell calculations requires to know of the exact geometry
of the cell and the availability of accurate libraries of cross sections
• The calculations provide firstly the space-energy detailed trend of
flux in the cell corresponding to the assigned values of material
compositions and physical parameters (transport theory is used)
The number of the considered energy groups can be even relatively
large, e.g. 100 - 200
The constants homogenized in few energy groups (e.g., 2 or 3) are then
calculated, providing the basis for the calculation of the space-time
distribution of neutron flux across the entire reactor (generally
performed using diffusion)
Elementary methods have been applied in the past in addition to
numerical ones. Some recipes used in their developments are still used
nowadays in codes. We will anyway omit their discussion.
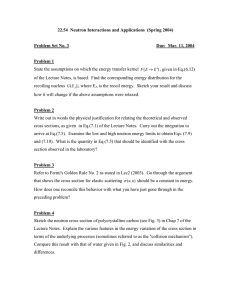
Logical flow of cell calculations
NMNR-Unit-5 – Neutron Transport Theory Fundamentals and Solution Methods – Part 1
4
NUMERICAL SCHEMES
Since elementary methods, whose discussion we omitted, make use of
heavy assumptions, as flat flux profile and uniform and isotropic
sources, it is necessary to make use of more adequate tools to evaluate
the detailed structure (both in space and in energy) of the neutron flux
Firstly, it is necessary to discretize the addressed energy interval into a
generally large number of energy groups.
The small size of the cell suggest to adopt the transport equation but,
in general, examples of application of the calculation procedure can be
also made making use of diffusion theory
Calculation of the detailed energy spectrum with assigned buckling
The calculations with assigned buckling are often performed in order
to consider an element of the core (cell or assembly) as belonging to a
larger core with its macroscopic distribution
In fact, considering the cell or the assembly as “isolated” fails in
considering the effect of leakages that do occur in finite cores: this
assumed “asymptotic” spatial behavior thus improves the results of
calculations including parametrical leakages effects
In this purpose, let us consider as a simple example the application of
the diffusion theory to “macro-regions” assumed to be homogeneous
If the slowing down phase is mainly addressed, the epithermal and fast
energy interval (0.65-1.3 eV to 14 MeV) is subdivided into a large
number of intervals with nearly equal spacing in lethargy
In the “macro-region” the energy-space separability of the flux is
assumed so that:
φ(r , E ) = φ∞ (E )ϕ(r )
∇ 2ϕ + B 2 ϕ = 0
2
B 2 = Bmat
= (k∞ − 1) / M 2
M 2 = L12 (1 − f ) + τt
2
~
V0 φ0
D
1
2
L = ~ = ~ ~ = L1 (1 − f ) 1 +
Σ a 3Σ aΣtr
V1φ1
2
Σtr ,0V0 φ0 2
1 +
≅ L1 (1 − f )
Σtr ,1V1φ1
In each energy interval it is assumed that:
NMNR-Unit-5 – Neutron Transport Theory Fundamentals and Solution Methods – Part 1
5
φ g (r ) =
∫ φ(r , E )dE = ϕ(r ) ∫ φ∞ (E )dE = ϕ(r )φ∞, g
∆E g
∆E g
From the equations with very many energy groups
h
h
h
D g( )∇ 2φg ( r ) − Σ (r , g) φg ( r ) + ∑ Σ (s , g) ′→ gφg ′ ( r ) + S g ( r ) = 0
( g = 1,..., G )
g ′< g
assuming that
S g (r ) = S g ϕ(r )
we obtain
(
)
h
h
h
− Σ (r , g) + Dg( ) B 2 φ∞ , g + ∑ Σ (s , g) ′→ gφ∞ , g + S g = 0 ( g = 1,..., G )
g ′< g
being a lower triangular system of algebraic equations
Generally, in order to normalize the source, it is put:
Sg = χg
( g = 1,...,G )
The vector {φ ∞, g }1G represents the detailed asymptotic flux in
region h . Once we are in possession of its distribution, we can
calculate the “few group” cross sections.
Let us assume that we need defining three “energy macro-groups”:
1
fast group (14 MeV → 20 keV )
in this case we assume it involves the
groups g = 1,...,40 in the detailed
subdivision;
GROUP II: epithermal group ( 20 keV → 1.3 eV )
e.g., corresponding to g = 41,...,100 in the
detailed subdivision;
GROUP III : thermal group (1.3 eV → 0 eV ) that is here
only marginally addressed.
GROUP I :
NMNR-Unit-5 – Neutron Transport Theory Fundamentals and Solution Methods – Part 1
I
40
II
100
III
6
In this case the cross sections for the first two energy macrogroups are:
40
~
Σ aI =
∑Σ
g =1
40
(h )
a ,g
100
φ∞ , g
~
Σ aII =
∑ φ∞, g
∑ Σ(h ) φ∞, g
g = 41
100
a ,g
∑ φ∞, g
g = 41
g =1
Similar formulations are applicable also for the other cross
sections:
100
~
Σ sI → II =
40
∑ ∑ Σ (h )
g = 41 g ′ =1
40
s, g ′→ g
φ∞, g ′
∑ φ∞, g ′
g ′ =1
(the index h has been momentarily omitted). Programs must
supply the full scattering matrix for large groups, including the
terms for transfer to the thermal group:
0
~ I → II
Σ
~ s
Σ sI → III
0
0
0
0
0
~
Σ sII → III
• In the case of absorption cross sections it is often necessary to start
from resonance integrals calculated with analytical treatment
(narrow or wide resonance) or semi-analytical treatment
(intermediate resonance) or numerical treatment (Nordheim)
• We can distinguish two cases:
♦ Homogeneous medium
For the k-th resonance in group g it is
I gk =
u g +1
∫ [σ a 0 (u )]eff du = ∫u
∆u g
g
σ a 0 (u )
φ(u )
du
φ as
So, being
u g +1
Σ a, g =
∫u
g
N 0σ a 0 (u )φ(u )du
u g +1
∫u
φ(u )du
g
by dividing numerator and denominator by φas , it is therefore
NMNR-Unit-5 – Neutron Transport Theory Fundamentals and Solution Methods – Part 1
7
Kg
∑
Kg
∑ I gk
I gk
k =1
Σ a, g = N 0
∫
∆u g
Σ a , g = N 0 k =1
(if it is φ ≈ φ as in ∆u g )
∆u g
or
φ(u )
du
φ as
♦ Heterogeneous medium:
For the k-th resonance in group g it is
I gk =
u g +1
∫ [σ a 0 (u )]eff du = ∫u
∆u g
g
σ a 0 (u )
φ 0 (u )
du
φ as
and the macroscopic homogenized cross section in group g is:
∫ N 0σ a 0 (u )φ0 (u )du
V0
~
Σ a, g =
∆u g
∫ φ0 (u )du +V1 ∫ φ1 (u )du
V0
∆u g
∆u g
where it was assumed that fluxes are spatially constant
If we further assume that φ1 (u ) ≅ φas , it is:
∫
V0
~
Σ a, g =
∆u g
V0
∫
∆u g
N 0 σ a 0 (u )
φ0 (u )
du
φ as
φ0 (u )
du +V1∆u g
φ as
K
~ g
N 0 ∑ I gk
=
k =1
V0
V
∫
∆u g
φ0 (u )
V
du + 1 ∆u g
φ as
V
~
V
N 0(h ) = N 0 0
V
where V = V0 + V1 is the cell volume; assuming again that
φ0 (u ) ≈ φas on a large share of ∆u g we would again obtain
Kg
∑ I gk
~
~
Σ a, g = N 0 k =1
∆u g
• The few group cross sections can be therefore obtained
• As an alternative to the use of diffusion theory, the transport theory
can be use, e.g., making use of the PN and BN equations with the
spatial asymptotic approximation (i.e., assuming a value of the
buckling)
• The codes normally also compute σtr , g = σ s, g (1 − µ ) ( µ = 2 3 A ) and,
~
~
collapsing the data into large groups, the cross sections Σ trI , Σ trII and
~
~
~
~
then D I = 1 3Σ trI e D II = 1 3ΣtrII are calculated.
NMNR-Unit-5 – Neutron Transport Theory Fundamentals and Solution Methods – Part 1
8
• In order to obtain these results, the libraries must contain all the
necessary data for the involved materials
• It is therefore possible to write the diffusion (or transport)
equations for few groups. For three groups, for instance, it is:
~ (h )
~ (h )
~ (h )
1
~ (h ) 2
(h )
D
∇
φ
−
Σ
φ
+
χ
ν
Σ
φ
+
ν
Σ
φ
+
ν
Σ
1
1
1
1
1
2
2
3
r ,1
f ,1
f ,2
f ,3 φ 3 = 0
1
k
~
~ (h )
~ (h )
~ (h )
1
(h ) 2
(h )
(h )
D 2 ∇ φ 2 − Σ r , 2 φ 2 + Σ s ,1→ 2 φ1 + χ 2 ν 1Σ f ,1 φ1 + ν 2 Σ f , 2 φ 2 + ν 3 Σ f ,3 φ 3 = 0
k
~ (h ) 2
(h )
(h )
(h )
D3 ∇ φ 3 − Σ r ,3 φ 3 + Σ s ,1→3 φ1 + Σ s , 2→3 φ 2 = 0
(
)
(
)
Use of transport codes
• The calculation scheme for a more modern cell code is not very
different from the one reported above for the simplified case of
diffusion
• Traditionally, two sections of the program are considered, being
fast and epithermal, on one side, and thermal, on the other
a) Fast-epithermal spectrum in the cell
♦ The code must have access to wide libraries in the epithermal and
fast regions at several groups (hundreds)
♦ The resonance integrals are made making use of the Nordheim
technique in a full zone approach; analytical approaches are also
used
♦ Routines will also calculate in an automatic way the different
needed coefficients (e.g., Dancoff)
♦ Once the homogenized cross sections are obtained for the G groups,
the φ∞, g in the homogeneous medium are calculated by transport
(PN o BN) with tentative buckling
♦ In the detailed flux analyses some codes allow to keep separate the
different regions (e.g., ANISN, which is a 1D SN method, see later)
♦ The detailed energy distribution then allows to obtain constants
with few groups
NMNR-Unit-5 – Neutron Transport Theory Fundamentals and Solution Methods – Part 1
9
♦ These calculations must be repeated several times, owing to the
different compositions present in the core
b) Thermal spectrum in the cell
♦ In principle the same considerations already applied for the
epithermal-fast region apply
♦ The main difference consists in the fact that the up-scattering
makes the scattering matrix to be no more triangular and it is also
more complicated to be obtained
♦ Imposed buckling calculations can be made (PN or BN methods) or
the method of collision probability, based on the integral equation,
is also used, assuming in this case isotropic scattering
♦ Methods based on the integro-differential
accounting for anisotropy can be also used
equation,
fully
c) Assembly calculations
♦ Given the compositions of the different cells and the homogenized
cross sections, there are different possible ways of making the
assembly calculations
♦ In a traditional procedure the assembly is considered as composed
of small homogenized square cells, then making use of diffusion or
transport to further homogenize assuming reflective boundary
conditions
♦ Collapsing the cross sections to fewer groups over the entire
assembly must then be made
♦ A more up-to-date treatment involves to keep memory about the
heterogeneity of the cell during further homogenization and group
collapsing
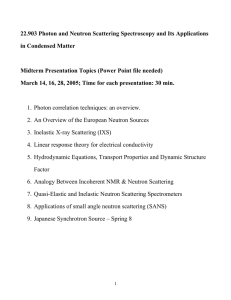
♦ The two routes as simply illustrated in the next page
NMNR-Unit-5 – Neutron Transport Theory Fundamentals and Solution Methods – Part 1
10
Cell calculations with many
groups by transport theory
in trasporto
Cell calculations with many
groups by transport theory
Frist homogenization to 6
groups in each cell
6 or 15 group cross sections for
the fuel and moderator regions
Assembly calculations
with diffusion theory
2D assembly calculations
with transport techniques
Second homogenization
and collapsing to 2 or 3 groups
Homogenization
and collapsing to 2 or 3 groups
Traditional approach
Modern approach
Examples of sequences of homogenization in cell and assembly calculations
NMNR-Unit-5 – Neutron Transport Theory Fundamentals and Solution Methods – Part 1
11
NEUTRON TRANSPORT EQUATION
Obtaining the integro-differential form
• We consider the change in the number of neutrons initially
contained in an elementary volume dV around r having direction
of motion inside an elementary angle dΩ around Ω and speed in an
elementary interval dv around v
• In one of the possible treatments, the related balance equation can
be obtained “following” this bunch of neutrons initially in dV ,
accounting for absorptions, scattering and sources
• Since we “follow” the neutrons, in this treatment there are no
explicit terms related to the leakage of neutrons through the
interfaces, though what we will call “streaming” term can be also
considered a “leakage” term in a control volume perspective
• The change in the number of these neutrons in the elementary time
interval dt is given by
δn = n r + vΩdt , vΩ, t + dt − n r , vΩ, t
[(
) (
)] dV dv dΩ
• Since in Cartesian coordinates it is by definition
r ≡ {x, y, z}
and
Ω ≡ Ω x ,Ω y , Ω z
{
}
we have:
∂ n ∂ n
∂n
∂n
n r + v Ωdt , v Ω, t + dt ≈ n r , vΩ, t +
+
vΩx +
vΩy +
v Ω z dt
∂y
∂z
∂ t ∂ x
(
) (
)
and then
Ω
z
dV
y
x
NMNR-Unit-5 – Neutron Transport Theory Fundamentals and Solution Methods – Part 1
12
∂ n ∂ n
∂n
∂n
+
v Ωx +
vΩy +
v Ω z dV dv dΩ dt =
∂y
∂z
∂ t ∂ x
δn =
∂ n
=
+ vΩ ⋅ grad r n r , vΩ, t
∂ t
(
) dV dv dΩ dt
• It is moreover:
collisions
contribution
inverted collisions
+
+
extracting neutrons contribution due to independent sources
δn = −
Therefore
δn = −v n(r ,vΩ,t ) Σ (r ,v )⋅ dV dv dΩ dt
dv′∫ v′n(r ,v′Ω′,t ) Σ (r ,v′Ω′ → vΩ ) dΩ′⋅ dV dv dΩ dt
+ S (r ,vΩ,t )⋅ dV dv dΩ dt
t
+∫
∞
0
s
4π
and then
∂n
+ vΩ ⋅ grad r n r , vΩ, t = −v n r , vΩ, t Σ t (r , v )
∂t
(
)
(
)
∞
+ ∫ dv ′∫ v ′n r ,v ′Ω ′,t Σ s r ,v ′Ω ′ → vΩ dΩ ′ + S r ,vΩ,t
0
4π
(
) (
)
(
)
• Making energy to become the independent variable in place of
velocity, we have:
1 ∂ φ r , E , Ω, t + Ω ⋅ grad r φ r , E , Ω, t + Σ t (r , E ) φ r , E , Ω, t =
v ∂t
= ∫∫ Σ s r , E ′ → E , Ω ′ → Ω φ r , E ′, Ω ′, t dE ′dΩ ′ + S r , E , Ω, t
(
)
(
(
)
)(
(
)
)
(
)
• From left to right, we recognize the following terms in the equation:
♦ the rate of change in neutron density
♦ the “streaming” term (also said leakage term: see later for an
explanation)
♦ the collision (scattering + absorption) term
♦ the inverted collision (“scattering”) term
♦ the independent (assigned) source
NMNR-Unit-5 – Neutron Transport Theory Fundamentals and Solution Methods – Part 1
13
• If a fission source is explicitly considered, we have:
∂n
+ vΩ ⋅ grad r n r , vΩ, t = −v n r , vΩ, t Σ t (r , v )
∂t
(
∞
+ ∫ dv ′ ∫
0
4π
+
)
(
)
v ′n r ,v ′Ω ′,t Σ s r ,v ′Ω ′ → vΩ dΩ ′ + S r ,vΩ,t
(
χ(v ) ∞
dv′∫
4π
4π ∫0
) (
)
(
v′n(r ,v′Ω′,t ) νΣ (r ,v′) dΩ′
)
f
which evidently assumes that the fission source is isotropic
• The transport equation is linear; therefore, it is possible to define
(at least formally) a Green function that provides a solution for any
given distribution of independent sources
Initial conditions
• Assigning initial conditions does not involve special problems: an
appropriate function representing the neutron flux or the angular
density at t=0 is sufficient
Conditions at the interfaces
• The angular flux [density] is spatially continuous across the
interfaces, once the direction is fixed
♦ this follows from an obvious condition of continuity
♦ this does not hold only if interfaces are considered as surface
sources
Boundary conditions
• The more frequently used ones are
♦ Free surface, i.e. interface to the void
it applies over the boundary ∂V of a convex domain V (i.e., nonreentrant), such that neutrons exiting from the surface have a
negligible probability to reenter
φ r ,Ω, E ,t = 0
(
)
Ω ⋅ ue < 0,r ∈ ∂ V
for
where ue is the outward directed unity vector normal to the
boundary
NMNR-Unit-5 – Neutron Transport Theory Fundamentals and Solution Methods – Part 1
14
♦ imposed incoming flux
also this condition can be applied to the boundary ∂V of a
domain V and can be
expressed as
φ r ,Ω, E ,t = Ψ r ,Ω, E ,t
for
Ω ⋅ ue < 0, r ∈ ∂V
♦ reflection with assigned “albedo”
it is assumed that the flux entering through ∂V in a given
direction is equal to a fraction α(E ) (“albedo”) of the exiting one
corresponding to it by a reflection condition
(
) (
)
φ r ,Ω,E ,t = α(E ) φ r ,Ω′,E ,t
(
)
(
)
Ω ⋅ ue < 0, r ∈ ∂V
for
and
for
e
Ω ⋅ ue = −Ω′ ⋅ ue
Ω × Ω′ ⋅ ue = 0
with α(E ) = 1 we have the pure reflection;
(
)
;
♦ white or diffuse reflection
in this case we assume that the number of neutrons exiting
from any surface element is equal to that of entering neutrons
and that the entering angular flux is isotropic; it is:
J u−e = J u+e
φ r , Ω, E , t = C
(
)
Ω ⋅ ue < 0, r ∈ ∂V
for
with
= J u−e ⋅ u e = ∫
J u−e
Ω′⋅ue <0
2π
0
u e ⋅ Ω ′ φ r ,Ω ′,E ,t dΩ ′ = ∫ dϕ ∫ µ Cdµ = πC
(
J u+e = J u+e ⋅ ue = ∫ )
u
Ω ′ ⋅u e > 0 e
0
−1
⋅ Ω′ φ r ,Ω′, E ,t dΩ′
(
)
It is therefore:
1
1
φ r ,Ω, E ,t = C = J u+e = ∫ u e ⋅ Ω ′φ r ,Ω ′, E ,t dΩ ′
π
π Ω′⋅ue >0
(
)
(
)
Ω ⋅ u e < 0, r ∈ ∂ V
♦ variable flux with space periodicity
this situation can be obtained for instance in the case of an
infinite core composed by elementary cells that are all equal
and is expressed in the form
(
) (
φ r , Ω, E , t = φ r + mrl , Ω, E , t
)
where rl is a vector whose magnitude represents the size of the
cell and m is an integer number
NMNR-Unit-5 – Neutron Transport Theory Fundamentals and Solution Methods – Part 1
15
Transport Equation and Neutron Balance
• From the integro-differential equation, involving the angular flux,
it is possible to obtain the neutron continuity equation in terms of
scalar flux
1 ∂ φ r , E , Ω, t + Ω ⋅ grad r φ r , E , Ω, t + Σ t (r , E ) φ r , E , Ω, t =
v ∂t
= ∫∫ Σ s r , E ′ → E , Ω ′ → Ω φ r , E ′, Ω ′, t dE ′dΩ ′ + S r , E , Ω, t
(
)
(
)
)(
(
(
)
)
(
)
• In this purpose it is sufficient to integrate both sides of the integrodifferential equation over the complete 4π
π solid angle, i.e. over the
full range of directions
• The integration over dΩ , since it involves only the directions, can be
exchanged in order of execution with space and time derivatives
• We also make use of the following straightforward results:
Ω ⋅ grad rφ r , Ω, E , t = Ω ⋅ ∇φ r , Ω, E , t = ∇ ⋅ φ r , Ω, E , t Ω = div φ r , Ω, E , t Ω
(
)
(
)
[(
)
) ]
∫π div[φ (r , Ω, E, t )Ω] dΩ = div ∫πφ (r , Ω, E , t )Ω dΩ = div J = ∇ ⋅ J
4
∫ φ r , Ω, E , t dΩ = φ(r , E , t )
(
(
4
)
S
r
∫ , Ω, E , t dΩ = S (r , E , t )
(
4π
)
4π
• For the scattering term, it must be recognized that integrating over
outgoing direction from scattering also eliminates the dependence
on the incoming direction, as shown in the last of the following
lines:
(
)(
)
′
′
Σ
r
,
E
→
E
,
Ω
→
Ω
φ
r
, E ′, Ω ′, t dE ′dΩ ′dΩ
∫ ∫∫ s
4π
= ∫∫ ∫ Σ s r , E ′ → E , Ω ′ → Ω dΩ φ r , E ′, Ω ′, t dE ′dΩ ′
4 π
= ∫∫ Σ s (r , E ′ → E )φ r , E ′, Ω ′, t dE ′dΩ ′ = ∫ Σ s (r , E ′ → E ) φ(r , E ′, t ) dE ′
(
)
(
(
)
)
We then obtain:
1 ∂ φ(r , E , t ) + ∇ ⋅ J (r , E , t ) + Σ t (r , E ) φ(r , E , t ) = ∫ Σ s (r , E ′ → E ) φ(r , E ′, t )dE ′ + S (r , E , t )
v ∂t
NMNR-Unit-5 – Neutron Transport Theory Fundamentals and Solution Methods – Part 1
16
• As well known, by integrating over whatever finite volume V and
making use of the divergence theorem the usual principle of
neutron conservation is obtained
1∂ φ
(
r
,
E
,
t
)
dV
+
J
(
r
,
E
,
t
)
⋅
n
dS
+
Σ
(
r
,
E
)
φ
(
r
, E , t )dV =
t
∫V v ∂t
∫∂V
∫V
= ∫ ∫ Σ s (r , E ′ → E ) φ(r , E ′, t )dE ′dV + ∫ S (r , E , t )dV
V
V
• Integrating over the complete energy spectrum, it is also possible to
reach the energy-independent form of the conservation principle
∫V
1 ∂ φ(r , t )dV + ∫ J (r , t ) ⋅ n dS + ∫ Σ a (r ) φ(r , t )dV = ∫ S (r , t )dV
∂V
V
V
v ∂t
• In summary, the “detailed” neutron balance represented by the
integro-differential equation, performed direction by direction,
obviously implies also the overall neutron balance (i.e., the
continuity principle) that is adopted in conjunction with the Fick’s
law to obtain the diffusion equation
• In this latter case, the Fick’s law, as known, represents an
approximation that is not needed when using the integrodifferential transport equation, being per se an “exact” equation of
neutron balance and transport as well
NMNR-Unit-5 – Neutron Transport Theory Fundamentals and Solution Methods – Part 1
17
THE MONOKINETIC AND STEADY-STATE
NEUTRON TRANSPORT EQUATION
• From the integro-differential equation, by eliminating the time
dependence and assuming v = 1, it is obtained
Ω ⋅ grad r n r , Ω + Σt (r ) n r , Ω = ∫ Σ s r , Ω′ → Ω n r , Ω′ dΩ′ + S r , Ω
( )
( )
(
4π
)(
)
( )
• Recalling the slowing down theory, it may be understood that the
differential scattering macroscopic cross section, depending in
general
by both the incoming and outcoming neutron directions,
Ω′ → Ω , can be actually expressed as a function of the angle ψ
between the two directions,
given
by
Ω ⋅ Ω′ :
(
)
(
)
Σ s r , Ω′ → Ω = Σ s r , Ω ⋅ Ω′ = Σ s (r , cos ψ )
• The scattering process, in turn, can be considered according to
different assumptions
♦ isotropic scattering (in the laboratory reference
frame):
Σ (r )
Σ s r , Ω′ → Ω = s
4π
(
)
♦ linearly anisotropic scattering (in the laboratory reference frame):
Σ s (r )
Σ s (r )
Σ s r , Ω′ → Ω =
1 + b Ω ⋅ Ω′ =
(1 + b cos ψ )
4π
4π
in which b is an appropriate non-zero constant; by integrating
(
)
(
)
over the whole range of directions and recalling that it can be
written
dΩ = sen ψ dψ dϕ
it is
Σ s (r ) 2 π
π
∫4π Σ s r , Ω ′ → Ω dΩ = 4π ∫0 dϕ∫0 (1 + b cos ψ ) sen ψ dψ
(
)
By putting
µ 0 = Ω ⋅ Ω ′ = cos ψ
⇒
dµ 0 = − sen ψ dψ
we can check that it is:
1
Σ s (r ) 2 π
∫4π Σ s r , Ω′ → Ω dΩ = 4π ∫0 dϕ∫−1(1 + bµ0 )dµ0 = Σ s (r )
(
)
NMNR-Unit-5 – Neutron Transport Theory Fundamentals and Solution Methods – Part 1
18
and moreover it is:
π
Σ s (r ) 2 π
dϕ∫ (1 + b cos ψ ) cos ψ sen ψ dψ
′
Σ
r
,
Ω
→
Ω
cos
ψ
d
Ω
∫
s
∫
0
0
µ0 = 4 π
= 4π
=
Σ s (r )
′
Σ
r
,
Ω
→
Ω
d
Ω
∫ s
(
4π
=
)
(
)
π
1 2π
1 1
b
dϕ∫ (1 + bcos ψ )cos ψ sen ψ dψ = ∫ (1 + bµ 0 )µ 0 dµ 0 =
∫
0
4π 0
2 −1
3
or
b = 3µ0
♦ generally anisotropic scattering (in the laboratory reference frame):
in this case an expansion in series of Legendre polynomials
∞
2l + 1
Σ s r , Ω′ → Ω = Σ s (r , µ 0 ) = ∑
Σ s ,l (r )Pl (µ 0 )
l = 0 4π
(
)
is used.
For our present purposes, it is sufficient to recall that these
polynomials constitute a complete set of orthogonal functions over the
interval − 1 ≤ µ ≤ 1; a further meaning of this choice will be reported
later.
These polynomials are defined as
P0 (µ0 ) = 1,
P1(µ0 ) = µ 0
Pl +1 (µ0 ) =
2l + 1
l
µ 0 Pl (µ0 ) −
Pl −1 (µ0 )
l +1
l +1
(l ≥ 1)
It is therefore:
P2 (µ 0 ) =
(
)
1 2
3µ 0 − 1 ,
2
P3 (µ 0 ) =
(
)
1 3
5µ 0 − 3µ 0 ,
2
....
The orthogonality relation between these polynomials is defined as:
2
1
∫−1 Pn (µ0 )Pm (µ0 )dµ0 = 2n + 1 δnm
From this relation, the following expression for the coefficients of
the series can be obtained:
1
Σ s ,l (r ) = 2π ∫ Σ s (r , µ 0 )Pl (µ 0 )dµ 0
−1
Obviously enough, the case of the linearly anisotropic scattering
correspond to truncate the series of Legendre polynomials at l = 1.
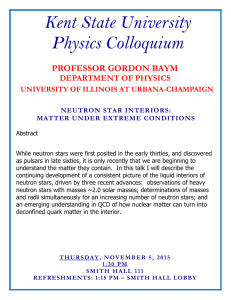
NMNR-Unit-5 – Neutron Transport Theory Fundamentals and Solution Methods – Part 1
19
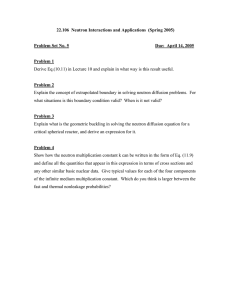
The following plots of the first few Legendre polynomials help in
understanding the reasons for their orthogonality (check graphically)
and the fact that odd or even numbered polynomials are odd or even
functions, having symmetric positive and negative roots.
NMNR-Unit-5 – Neutron Transport Theory Fundamentals and Solution Methods – Part 1
20
THE MONOKINETIC AND STEADY-STATE
CASE IN PLANE 1D GEOMETRY
Obtaining the equation
• It is assumed that the characteristics of the region depend only of
the single spatial coordinate x
• Both the angular density and the source will depend, in addition, by
Ω x ≡ µ = cos θ . It is:
n = n ( x, Ω x ) = n ( x, µ )
∂n
Ω ⋅ grad r n( x, µ ) = µ
∂x
S = S ( x, Ω x ) = S ( x , µ )
Σ s = Σ s ( x , Ω x ) = Σ s ( x, µ )
Σ t = Σ t (x)
• We assume that the scattering source is linearly anisotropic in the
laboratory reference frame. It is:
µ
Σ (x )
∂ n( x, µ )
+ Σ t ( x ) n( x,µ ) = s
(1 + b cos ψ ) n( x, µ ′)dΩ ′ + S (x, µ )
∂x
4π ∫4 π
cos ψ = Ω ⋅ Ω′ = µ 0
µ′ ≡ Ω′x
(°)
• Considering the Figure below, it is:
µ0 = Ω ⋅ Ω′ = Ω x + Ω ⊥ ⋅ Ω′x + Ω′⊥ = Ω xΩ′x + Ω ⊥ Ω′⊥ cos(ϕ − ϕ′) =
(
)(
)
= µµ′ + 1 − µ 2 1 − µ′2 cos(ϕ − ϕ′)
NMNR-Unit-5 – Neutron Transport Theory Fundamentals and Solution Methods – Part 1
21
By integrating both sides of (°) on 0 ≤ ϕ ≤ 2π and making use of the
definitions:
~
2π
S ( x, µ ) = ∫ S ( x, µ )dϕ = 2π S ( x, µ )
2π
n~( x, µ ) = ∫ n( x, µ )dϕ = 2πn( x, µ )
0
0
we obtain
~
∂ n~
Σ (x ) 2π
µ
+ Σt ( x )n~ ( x, µ ) = s
dϕ∫ (1 + bµ0 )n( x, µ′)dΩ′ + S ( x, µ )
∫
4π
∂x
4π 0
and then
~
∂ n~
Σ (x)
µ
+ Σt ( x )n~ ( x, µ ) = s ∫ (1 + bµµ′)n( x, µ′)dΩ′ + S ( x, µ )
∂x
2 4π
(°°)
In the above, use is made of the relationship
2π
2π
∫0 (1 + bµ 0 )dϕ = ∫0
[1 + bµµ′ + b 1 − µ
2
]
1 − µ′2 cos(ϕ − ϕ′) dϕ = 2π(1 + bµµ′)
• Considering that dΩ ′ = dµ ′dϕ ′ , it is then:
2π
∫4π (1 + bµµ ′)n( x, µ ′)dΩ ′ = ∫0
1
1
dϕ′∫ (1 + bµµ ′)n( x, µ ′)dµ ′ = ∫ (1 + bµµ ′)n~ ( x, µ ′)dµ ′
−1
−1
and Eq. (°°) becomes:
~
∂ n~
Σ (x) 1
µ
+ Σt ( x )n~ ( x, µ ) = s ∫ (1 + bµµ′)n~ ( x, µ′)dµ′ + S ( x, µ )
∂x
2 −1
Finally, dropping the “tilde” (i.e., dividing by 2π
π), we have:
µ
∂n
Σ (x) 1
+ Σt ( x )n( x, µ ) = s ∫ (1 + bµµ′)n( x, µ′)dµ′ + S ( x, µ )
∂x
2 −1
(°°°)
Spherical harmonics
• Even the angular density of neutrons can be expressed in the form
of a series of Legendre polynomials with coefficients depending on
the spatial coordinate
n( x, µ ) =
∞
2k + 1
nk ( x )Pk (µ )
k =0 2
∑
with
1
n k ( x ) = ∫ n( x, µ ) Pk (µ ) dµ
−1
• In particular, we note that it is:
1
1
−1
−1
n0 ( x ) = ∫ n( x, µ )P0 (µ )dµ = ∫ n( x, µ ) dµ = ρ( x )
1
1
1
n1 ( x ) = ∫ n( x, µ )P1 (µ )dµ = ∫ n( x, µ )µ dµ = ∫ n x, Ω Ω x dµ = J x ( x ) = J ( x )
−1
−1
−1
( )
NMNR-Unit-5 – Neutron Transport Theory Fundamentals and Solution Methods – Part 1
22
• Also the source, that is generally anisotropic, can be expressed in
terms of a series of Legendre polynomials
S ( x, µ ) =
∞
2k + 1
sk ( x )Pk (µ )
2
k =0
∑
1
sk ( x ) = ∫ S ( x, µ )Pk (µ )dµ
−1
• If we substitute this equation into (°°°), we have
∞
∞
2k + 1 d nk
2k + 1
∑ 2 d x µ Pk (µ ) + Σ t ( x ) ∑ 2 nk ( x )Pk (µ ) =
k =0
k =0
=
∞
∞
Σ s (x) 1
2k + 1
2k + 1
′
′
′
(
)
(
)
(
)
1
+
b
µ
µ
n
x
P
µ
d
µ
+
s k ( x )Pk (µ )
∑
∑
k
k
∫
2 −1
2
2
k =0
k =0
Making use of the recurrence formulation of Legendre polynomials,
written in the form
(2k + 1)µ Pk (µ ) = (k + 1)Pk +1 (µ ) + k Pk −1 (µ )
for the first term of the balance equation it is
∞
2 k + 1 d nk
1 ∞ d nk
(
)
∑ 2 d x µPk µ = 2 ∑ d x [(k + 1)Pk +1 (µ ) + k Pk −1 (µ )]
k =0
k =0
• Considering the already seen form of the Legendre polynomials of
order 0 and 1 (respectively, P0 (µ ′) = 1 and P1 (µ ′) = µ ′ ), and making use
of the orthogonality relation
2
1
∫−1 Pn (µ0 )Pm (µ0 )dµ0 = 2n + 1 δnm
we have (follow the chain of equalities):
∞
1
2k + 1
2k + 1
′
′
(
)
(
)
(
)
[P0 (µ ′) + bµ P1 (µ ′)]Pk (µ ′)dµ ′
n
x
P
d
=
n
x
µ
µ
∑
k
k
k
∫−1
∫
−1
2
2
k =0
k =0
∞
2k + 1
2
2
nk ( x )
=∑
δ 0 k + bµ
δ1k = n0 ( x ) + bµ n1 ( x ) = n0 ( x )P0 (µ ) + b n1 ( x )P1 (µ )
2k + 1
2k + 1
k =0 2
1
∞
(1 + bµµ ′)∑
• It is therefore
∞
1 ∞ d nk
2k + 1
(
)
(
)
(
)
(
)
[
k
+
1
P
µ
+
k
P
µ
]
+
Σ
x
nk ( x )Pk (µ )
∑
∑
k +1
k −1
t
2 k =0 d x
2
k =0
∞
Σ s (x )
=
[n0 (x )P0 (µ ) + bn1 (x )P1 (µ )] + ∑ 2k + 1 sk (x )Pk (µ )
2
2
k =0
NMNR-Unit-5 – Neutron Transport Theory Fundamentals and Solution Methods – Part 1
23
• Now, by multiplying both sides of the previous equations by Pl (µ )
and integrating on − 1 ≤ µ ≤ 1, it can be found:
l d nl −1 l + 1 d nl +1
b
+
+ Σ t ( x ) nl (x ) = Σ s ( x ) n0 (x )δ 0l + n1 (x )δ 1l + sl ( x )
2l + 1 d x
2l + 1 d x
3
(l = 0,1,...)
♦ In fact, it can be noted that:
1 1 ∞ d nk
∑ [(k + 1)Pk +1 (µ ) + k Pk −1 (µ )]Pl (µ )dµ
2 ∫−1 k = 0 d x
1 1 ∞ d nk
1 1 ∞ d nk
[
(
k
+
1
)
P
(
)
]
P
(
)
d
+
µ
µ
µ
∑
∑ [k Pk −1 (µ )]Pl (µ )dµ
k +1
l
2 ∫−1 k = 0 d x
2 ∫−1 k =0 d x
1 1 d nl −1
1 1 d nl +1
= ∫
(l ) Pl (µ )Pl (µ )dµ + ∫
[(l + 1)Pl (µ )]Pl (µ )dµ
2 −1 d x
2 −1 d x
dn
dn l +1
1 d nl −1
2
1 d nl +1
2
l
=
(l )
+
(l + 1)
= l −1
+ l +1
2 dx
2l + 1 2 d x
2l + 1
d x 2l + 1 d x 2l + 1
=
Moreover, it is:
1
∫
−1
∞
1
2k + 1
2l + 1
nk (x )Pk (µ )Pl (µ )dµ = ∫ Σ t (x )
nl (x )Pl (µ )Pl (µ )dµ
−
1
2
2
k =0
2l + 1
2
= Σ t (x )
nl ( x )
= Σ t ( x ) nl (x )
2
2l + 1
Σ t ( x )∑
and
Σ s (x )
∫−1 2 [n0 (x )P0 (µ ) + bn1 (x )P1 (µ )]Pl (µ ) dµ
Σ (x )
2
2
b
δ 0l + bn1 ( x )
δ 1l = Σ s ( x ) n0 ( x ) δ 0 l + n1 ( x )δ 1l
= s n0 ( x )
2
2 × (0) + 1
2 × (1) + 1
3
1
and finally
∞
2k + 1
2l + 1
2
sk ( x )Pk (µ )Pl (µ )dµ =
sl ( x )
= sl ( x )
−1
2
2
2l + 1
k =0
∫∑
1
♦ The obtained one is a system of infinite ordinary differential
equations completely equivalent to the original partial differential
equation
♦ The single assumption introduced in their development is related to
the fact that linear anisotropy of the scattering source
♦ The use of Legendre polynomials in place of the more general
“spherical harmonics” has been possible owing to the symmetry
that is obtained in the planar geometry around the x axis
NMNR-Unit-5 – Neutron Transport Theory Fundamentals and Solution Methods – Part 1
24
♦ In fact, the spherical harmonics, in their most general form
constitute an orthonormal basis of functions that can be used to
express in the form of a series any other sufficiently regular
function of colatitude and azimuth, θ and ϕ .
♦ They have the form
2l + 1 (l − m )! m
m
Pl (cos θ) e imϕ and it is Yl ,− m (θ, ϕ) = (− 1) Yl*,m (θ, ϕ)
4 π (l + m )!
Ylm (θ, ϕ ) =
where Ylm* (θ, ϕ ) represents the complex conjugate of Ylm (θ, ϕ ) and the
Legendre associated functions are defined as
m
(
Pl (µ ) = (− 1) 1 − µ
m
)
2 m 2
d m Pl (µ )
( m = 0,1, ..., l )
dµ m
♦ In other words, they can represent any function defined on a sphere
having unit radius and depending only on the above angles (as on
an ideal spherical earth would be for the geological corrugations)
♦ Given a function f (θ, ϕ ) , it is therefore
∞
f (θ, ϕ ) = ∑
l
∑ f lmYlm (θ, ϕ)
2π
1
0
−1
*
(θ, ϕ)d (cos θ)
f lm = ∫ dϕ ∫ f (θ, ϕ )Ylm
l =0 m = − l
where use was made of the orthogonality relationship
2π
∫0
1
dϕ ∫ Ylm (θ, ϕ )Yl*′m′ (θ, ϕ ) d (cos θ) = δ ll ′ δ mm′
−1
♦ As the Legendre polynomials, to which they are identical when
m = 0 (i.e., Pl0 (µ ) = Pl (µ ) ), also the Legendre associated functions
possess an orthogonality property
1
2 (l + m )!
m
m
∫−1 Pl (µ )Pl ′ (µ )dµ = 2l + 1 (l − m )! δll′
and can be obtained by a recurrence relationship as
µ Plm (µ ) =
[
]
1
(l − m + 1)Plm+1 (µ ) + (l + m )Plm−1 (µ )
2l + 1
Assuming µ = cos θ , the first Legendre associated functions are
(
P11 (µ ) = − 1 − µ 2
)1 2 = − sen θ
(
P21 (µ ) = −3 1 − µ 2
(
)1 2 µ = −3sen θcos θ
)
P22 (µ ) = 3 1 − µ 2 = 3 sen 2 θ
NMNR-Unit-5 – Neutron Transport Theory Fundamentals and Solution Methods – Part 1
25
PN approximations and the particular case of P1
a) The PN equations and the related boundary conditions
• An approximate solution of the system of infinite equations reached
in terms of spherical harmonics can be obtained by truncating the
series
• In particular, truncating the development at N+1-th term
(l=0,1,…,N) the PN approximation is obtained
• Concerning the N + 1 boundary conditions to be imposed, a
difficulty arises in the case of a medium facing the void, since the
angular flux is discontinuous while passing from µ < 0 to µ > 0 ; in
fact:
for
φ r ,Ω, E ,t = 0
Ω ⋅ ue < 0, r ∈ ∂V
for
φ r ,Ω, E,t ≠ 0
Ω ⋅ u e > 0, r ∈ ∂V
• It is obvious that a relatively low order polynomial cannot
adequately represent this angular discontinuity in the angular flux
(
(
)
)
• Some practical rules that allow for an approximation of the true
boundary conditions were proposed. We will express them in term
of flux, since in our one-velocity case we have n ≡ φ
• The first rule, with reference to an isolated layer with 0 ≤ x ≤ a , is
known as the Marshak boundary conditions and consists in choosing
an odd N and imposing:
1
0
∫ P (µ )φ (0, µ )dµ = ∫ P (µ )φ (a, µ )dµ = 0
0
i
−1
i
(i = 1,3,5, ..., N ) N odd
In the case i = 1 , we have, in fact, the condition of zero entering
current which is the one actually used in diffusion cases:
1
0
∫0 µ φ(0, µ )dµ = ∫−1µ φ(a, µ )dµ = 0
• A second rule is the one under the name of Mark boundary
conditions, consisting in imposing that it is:
φ (0, µi+ ) = 0
µi+ > 0 (i = 1,2,3, ..., (N + 1) / 2 ) N odd
φ (a, µi− ) = 0
µi− < 0 (i = 1,2,3, ..., ( N + 1) / 2) N odd
where µi+ and µi− identify respectively the positive and negative
roots of the equation
PN +1 (µ ) = 0
(remember the shape of the Legendre polynomials)
NMNR-Unit-5 – Neutron Transport Theory Fundamentals and Solution Methods – Part 1
26
• It has been shown that the Mark boundary conditions imply the
substitution of the void space with a purely absorbing medium
• In the case of “pure reflection” at a boundary, we have instead no
problem. In fact, the conditions
φ(0, µ ) = φ(0,−µ )
(0 < µ < 1) e
φ(a, µ ) = φ(a,−µ )
(− 1 < µ < 0)
immediately translate into requiring that
φi (0 ) = φi (a ) = 0
i odd
i.e., the angular flux at the boundary must be an even function of
µ.
b) P1 Approximation
In this case it is:
n ( x, µ ) ≅
1
2k + 1
1
3
nk ( x )Pk (µ ) = n0 ( x ) + n1 ( x )µ
2
2
k =0 2
∑
• The related differential equations are:
(l = 0)
(l = 1)
d n1
+ Σt ( x )n0 ( x ) = Σ s ( x )n0 ( x ) + s0 ( x )
dx
b
1 d n0 2 d n2
+
+ Σt ( x )n1( x ) = Σ s ( x )n1( x ) + s1( x )
3 dx 3 dx
3
(check the correctness of this form as a simple exercise)
• Putting n2 ( x ) = 0 , as it must be for P1, and assuming that the source
is independent and isotropic ( s1 ( x ) = 0 ) from the second equation we
get the following one
1
d n0
3(Σt − µ Σ s ) d x
which, remembering that n0 ( x ) = ρ( x ) and n1 ( x ) = J ( x ) , expresses
n1( x ) = −
the Fick’s law of diffusion:
J (x) = − D
dρ
dx
D( x ) =
1
1
≈
3(Σ t − µ Σ s ) 3Σ s (1 − µ )
NMNR-Unit-5 – Neutron Transport Theory Fundamentals and Solution Methods – Part 1
27
• By introducing this result in the equation for l = 0 , having the role
of a continuity equation, it is:
d
dρ
D( x ) − Σ a ( x )ρ( x ) + s0 ( x ) = 0
dx
dx
So, it is quite interesting to see that, in the limit of the considered
assumptions, the P1 approximation coincides with the diffusion equation
with the transport correction for the diffusion coefficient
NMNR-Unit-5 – Neutron Transport Theory Fundamentals and Solution Methods – Part 1
28
INTEGRAL EQUATION
Derivation
• The transport equation in integral form (Perierls equation) can be
obtained directly on the basis of simple considerations or even from
the integro-differential equation
• For the sake of simplicity, let us consider the steady-state case,
bring of greatest interest for applications. The transient treatment,
anyway, is not too complex (see Bell & Glasstone, 1979, Par. 1.2).
• The integro-differential
equation
for transport in steady-state
(
)
(
vΩ ⋅ grad r n r , vΩ + vΣ t (r , v ) n r , vΩ
)
= ∫∫ v ′Σ s r , v ′Ω ′ → vΩ n r , v ′Ω ′ dv ′dΩ ′ + S r , vΩ
(
)(
can be rewritten
in terms of emission
density
)
q r , vΩ = ∫∫ v ′Σ s r , v ′Ω ′ → vΩ n r , v ′Ω ′ dv ′dΩ ′ + S r , vΩ
(
)
(
)(
)
(
(
)
)
and expressing the first term in the left hand side as a local
(directional) derivative of angular density along the direction of
motion of neutrons; it is:
−v
d n r − sΩ, vΩ
ds
(
= vΩ ⋅ grad r n r , vΩ
)
(
)
s =0
We have then:
−v
d n r − sΩ, vΩ
ds
(
+ vΣ t (r , v )n r , vΩ = q r , vΩ
(
)
) (
)
s =0
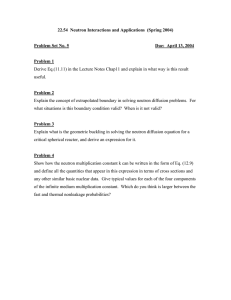
Now we can note that in every points of the
trajectory of neutrons, a
similar equation can be written for any Ω and r
r − s0 Ω
r − s0 Ω
Ω
r − sΩ
Ω
V
V
∂V
r
r
a)
b)
Definizione di vettori rilevanti nella derivazione
NMNR-Unit-5 – Neutron Transport Theory Fundamentals and Solution Methods – Part 1
29
• Therefore, considering a generic location “upstream”
considered location, identified by the coordinate s , we have
the
d n r − sΩ, vΩ + vΣ t r − sΩ, v n r − sΩ, vΩ = q r − sΩ, vΩ
ds
this relationship, once r and Ω are assigned, gives rise to a
(
−v
(
)
)(
) (
)
differential equation in terms of ordinary derivatives
• This equation can be integrated between r − s 0 Ω and the generic
location r − sΩ through a usual variable separation technique
1 d n r − sΩ, vΩ = Σ t r − sΩ, v n r − sΩ, vΩ − q r − sΩ, vΩ
v
ds
(
(
)
)(
)
(
)
providing the solution
− s0 Σt (r −s′Ω ,v )ds′
n r − sΩ, vΩ = n r − s0 Ω, vΩ e ∫s
(
) (
)
s′
− ∫ Σ t r − s′′Ω ,v ds′′
(
)
1 q r − s ′Ω, vΩ ds ′
s
v
• Since the objective of this process is to evaluate the angular density
at r , i.e. for s = 0 , from the previous one we obtain
− s0 Σt (r − s′Ω ,v )ds′
n r , vΩ = n r − s0 Ω, vΩ e ∫0
s′
s 0 − ∫ Σ t (r − s ′′Ω, v )ds ′′ 1 0
+∫ e
q r − s ′Ω, vΩ ds ′
0
v
• The angular density in r is obtained by the summation of two
contributions:
s0
+∫ e
(
) (
s
(
)
(
)
)
♦ the one due to the neutrons that at the location r − s 0 Ω have a
velocity v and direction of motion Ω , times the probability of
experiencing no collisions between r − s 0 Ω and r
♦ the summation of the elementary
contributions due to emission
density, q at locations r − s ′Ω , with s ′ ∈ [0, s 0 ] times the probability
of experiencing no collisions before reaching r
The isolated body
• Selecting the coordinate s0 on the boundary of domain V , we
impose that
for any Ω ⋅ u e < 0, r ∈ ∂V
n r , vΩ = 0
as it must be for an isolated body, and it is
(
)
NMNR-Unit-5 – Neutron Transport Theory Fundamentals and Solution Methods – Part 1
30
n r − so Ω, vΩ = 0
(
)
thus obtaining
s′
s 0 (r , Ω ) − ∫ Σ t (r − s ′′Ω , v )ds ′′ 1 e 0
q r − s ′Ω, vΩ ds ′
n r , vΩ = ∫
0
v
where the dependence of s 0 on r and Ω , in relation to the
particular geometry of the volume V , has been pointed out
(
(
)
)
• We now assume that the scattering reactions are isotropic in the
laboratory reference frame and that the independent sources are
also isotropic; it is
1
Σ s r , v ′Ω ′ → vΩ =
Σ s (r , v ′ → v ) e
4π
(
1 S r , vΩ =
S (r , v )
4π
)
and therefore
(
)
q r , vΩ ≡ q(r , v )
(
)
• Integrating over the complete solid angle, we have
ρ(r , v ) =
∫
n r , vΩ dΩ=
(
)
4π
∫
dΩ∫
4π
s0 r ,Ω
( )
0
e
s′
− ∫ Σ t r − s′′Ω ,v ds′′
0
(
)
e
dV ′ = s ′ 2 dΩ ds ′
• We then make use
of useful definitions
r ′ = r − s ′Ω ⇒
s′ = r − r ′
recognising that
Ω=
r − r′ r − r′
= s′
r − r′
dΩ ds ′ =
1 q r − s′Ω, v ds′
v
(
)
dV ′
dV ′
= 2 .
2
s′
r − r′
Definition of the volume of integration around r ′
• We also define the optical path
τ(r , r ′, v ) ≡
s′
∫0
Σ t r − s ′′Ω, v ds ′′
(
)
NMNR-Unit-5 – Neutron Transport Theory Fundamentals and Solution Methods – Part 1
31
representing the number of mean free paths for any type of collisions
covered by the integration distance
• In the case of an homogeneous body, it is
τ(r , r ′, v ) = Σ t (v )s ′ = Σ t (v ) r − r ′
• The exponential e − τ(r ,r ′,v ) represents therefore the probability that a
neutron emitted in r ′ with velocity v (in the direction of r ) has of
reaching r without colliding along the path
• Making use of these definitions, it is
dV ′
− τ (r , r ′,v ) 1 ρ(r , v ) = ∫ e
q(r ′, v ) 2
v
r − r′
V
Remembering the definition
of emission density, it is:
∞ v′
e − τ(r ,r ′,v ) 1
ρ(r , v ) = ∫
2 v S (r ′, v ) + ∫0 v Σ s (r ′, v ′ → v )ρ(r ′, v ′)dv ′dV ′
V 4π r − r ′
• In a mono-energetic case ( v = 1, Σ s (r , v ′ → v ) ≡ Σ s (r ) ) it is:
e − τ (r ,r ′ )
ρ(r ) = ∫
2 [S (r ′) + Σ s (r ′)ρ(r ′)] dV ′
V 4π r − r ′
• We note that:
♦ The formulations obtained involve a volume integral over the
domain V (and, possibly, one over velocity)
♦ They express the density of neutrons in the generic location r as
a result of the contributions of the emission density in elementary
volumes dV ′
♦ The contributions are weighted according to the probability to have
no collisions during the path and to the geometric attenuation
2
expressed by the factor 1 4π r − r ′
(
)
Numerical solution for the isolated body
• The above interpretation suggests an algorithm for the
approximate solution of the transport problem for an isolated body
in steady conditions, called the collision probability method
• The integration domain V is subdivided into a number N V of
control volumes in which it is assumed that neutron density and
sources are uniform
NMNR-Unit-5 – Neutron Transport Theory Fundamentals and Solution Methods – Part 1
32
• Each volume is assigned a value of neutron density that represents
the averaged actual values
1
(
)
(
) r ∈Vi ,
ρ
r
dV
≅
ρ
r
Vi V∫
ρi ≡
(i = 1,...,NV )
i
• Making use of the relationship
e − τ (r , r ′ )
′
′
′)]dV ′
[
(
)
(
)
(
ρ(r ) = ∫
S
r
+
Σ
r
ρ
r
s
2
V 4π r − r ′
the previous formulation
can be rephrased as
ρi ≡
1
e − τ (r , r ′ )
′) + Σ s (r ′)ρ(r ′)] dV ′
[
(
dV
S
r
∫
∫
2
Vi V
V 4π r − r ′
(i = 1,...,N V )
i
• It is therefore possible to write
1
ρi ≡
Vi
e − τ (r , r ′ )
∫ dV ∑ ∫ ′ 2 S j + Σ s j ρ j dV ′
j =1V j 4 π r − r
Vi
NV
[
• Finally, putting
Ai , j
1
≡
Vi
]
(i = 1,..., N V )
e − τ (r , r ′ )
∫ dV ∫ ′ 2 dV ′
Vi
V j 4π r − r
(i , j = 1,..., N V )
a linear system in nodal densities is obtained
NV
ρ i = ∑ Ai , j Σ sj ρ j + qi
(i = 1,...,NV )
j =1
NV
where
qi = ∑ Ai , j S j
(i = 1,...,NV )
j =1
• The system can be solved with any of the already seen usual
techniques
• It can be found that the constants Ai , j are related to the probability
V
Vi
Vj
Subdivision of volume V in control volumes
NMNR-Unit-5 – Neutron Transport Theory Fundamentals and Solution Methods – Part 1
33
of “first collision” in Vi of neutrons emitted in V j . In fact, by
definition, it is:
(0 )
Pj→i
e − τ (r , r ′ ) 1
Vi 1
e − τ (r , r ′ )
V
≡ ∫ Σti dV ∫ 2
dV ′ =Σti
dV ∫ 2 dV ′ =Σ ti i Ai , j
∫
Vj
V j Vi V V 4π r − r ′
Vj
Vi
V j 4π r − r ′
i
j
• Therefore, the solution of the problem requires the evaluation of
0)
the collision probabilities Pj(→
i
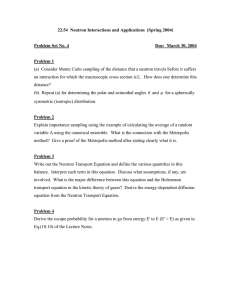
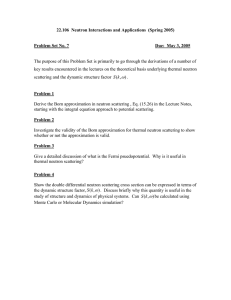
Numerical solution in the case of the cell
• In the case of the cell, the appropriate boundary condition is a
“white” (i.e., diffuse) reflection at the cell surface
• White reflection is generally preferred to pure reflection in cell
calculations because, in the case of a cylindricized cell, neutrons
having a small angle of incidence on the external cylindrical surface
will be hardly reflected towards the fuel rod (case b), contrary to
what would happen in the original square cell (case a). This would
lead to overestimate the neutron flux in the peripheral part of the
cell. The selection of a “diffuse” reflection (case c), instead, restores
a reasonable probability that neutrons reflected from the external
surface can intercept the fuel.
a) Pure reflection
b) Pure reflection
c) Diffuse reflection
• However, the introduction of reflection would change completely
the development of the integral transport equation, with the need to
consider incoming currents corresponding to outgoing ones at the
surface
• It is here shown that it is possible to modify the previous treatment
concerning the “collision probability method”, by including
reflections at the cell surface
NMNR-Unit-5 – Neutron Transport Theory Fundamentals and Solution Methods – Part 1
34
• In the single energy case ( φ = ρ since we chose v = 1 ) with an external
surface facing the void, the approximate solution φi is given by the
linear system
φi = ∑ j Ai , j (Σ s , j φ j + S j )
where
Ai , j =
1
Vi
∫V ∫V
i
e
j
− τ (r , r ′ )
2 dV dV ′
4π r − r ′
Introducing the collision probability
Pj →i
V
Σ
= i Σ ti Ai , j = ti
Vj
Vj
∫V ∫V
i
j
e − τ (r , r ′ )
2 dV dV ′
4π r − r ′
the system can be interestingly rewritten as
Vi Σ ti φi = ∑ j V j Pj → i (Σ sj φ j + S j )
having an obvious meaning: collisions in volume Vi are due to the
emissions in all the Vj multiplied by the collision probability from
volume j to volume i.
• We can generalize the algorithm considering a multi-group energy
approach
Vi Σ tig φig = ∑ j V j Pjg→ i
(∑
g′
Σ sjg ′→ g φ gj ′ + S gj
)
• In the case of white reflective boundary, a similar calculation
scheme is possible, avoiding complications due to the consideration
of incoming and outgoing currents
• We now define
g
j →S
P
g
S →i
P
= 1 − ∑i P
g
j →i
probability that a neutron of the energy
=
group g produced in V j
reaches the boundary S at its first flight
probability that a neutron of the energy
1
4Vi Σti g
=
Pi → S =
group g reflected by S
( )
S
collides in Vi at its first flight
(1) We accept this formulation without demonstration.
NMNR-Unit-5 – Neutron Transport Theory Fundamentals and Solution Methods – Part 1
35
g
S →S
P
= 1 − ∑i P
g
S →i
probability that a neutron of the energy
=
group g reflected by S
reaches again S
• We put therefore
2
~
Pjg→ i = Pjg→ i + Pjg→ S PSg→ i + Pjg→ S PSg→ S PSg→ i + Pjg→ S PSg→ S PSg→ i +...
(
)
that can be read as:
total probability that a neutron of the group g
emitted in V j
=
collides in Vi
probability that a neutron of group g
=
emitted in V j
collides directly at the first flight in V
i
probability that a neutron of group g
+
emitted in V j collides
in
V
after
a
reflection
in
S
i
probability that a neutron of group g
+
emitted in V j collides
in Vi after two reflections in S
probability that a neutron of group
+
emitted in V j collides
in Vi after three reflections in S
g
+ ...
• Considering the above geometric progression, it is therefore
Pjg→ S PSg→i
~g
g
Pj →i = Pj →i +
1 − PSg→ S
and the solution scheme for the cell with diffuse reflection is
formally the same found for the isolated body, provided we
substitute the “first flight” collision probabilities with the ones
combined with reflection
(
)
~
Vi Σ tig φig = ∑ j V j Pjg→ i ∑ g ′ Σ sjg ′→ g φ gj ′ + S gj
~
• The calculation of Pjg→ i (and of Pjg→ i ) represents an heavy task to
be performed, for which specific techniques have been developed
NMNR-Unit-5 – Neutron Transport Theory Fundamentals and Solution Methods – Part 1
36