The Newton–Kantorovich Method in Analytical Solution of
advertisement

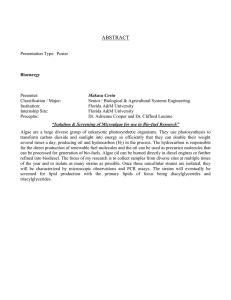
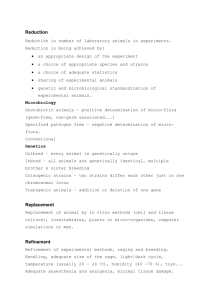
Applied Mathematical Sciences, Vol. 10, 2016, no. 56, 2789 - 2799 HIKARI Ltd, www.m-hikari.com http://dx.doi.org/10.12988/ams.2016.67220 The Newton–Kantorovich Method in Analytical Solution of Plane Elasticity Problems under Superimposed Finite Strains Vladimir Anatolievich Levin Lomonosov Moscow State University Department of Mechanics and Mathematics 119991 Moscow, Leninskie Gory, 1, MSU Main Building, Russian Federation Konstantin Moiseevich Zingerman Fidesys Limited, Office 402, 1 bld. 77, MSU Science Park, Leninskie Gory Moscow 119234, Russian Federation c 2016 Vladimir Levin and Konstantin Zingerman. This article is distributed Copyright under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. Abstract The specific features of the application of modified Newton’s method to approximate analytical solution of a class of nonlinear elasticity problems under finite plane strains are described. This class of problems includes problems of stress distribution around holes in infinite nonlinear elastic bodies. The problems are solved within the framework of the theory of superimposed finite strains. It is assumed that holes are originated in previously loaded bodies undergoing finite homogeneous initial strains. The specific features mentioned above are related with the necessity to obtain functions in right parts of linearized equations in a form that admits analytical integration. For this purpose, the equations and boundary conditions are written in a special form using the Cayley–Hamilton theorem and some changes of variables. The analysis is performed for the materials of Mooney type. Some numerical results are given. Mathematics Subject Classification: 74B20, 74H10 2790 Vladimir Levin and Konstantin Zingerman Keywords: stress concentration, nonlinear elasticity, superimposed finite strains, the Newton–Kantorovich method 1 Introduction The paper deals with the approximate analytical solution of a class of nonlinear elasticity problems. This class includes problems of stress distribution around holes that are originated in preliminarily strained bodies undergoing finite initial strains. The problems are formulated and solved within the framework of the theory of superimposed finite strains [2, 5]. The solution of these problems may be used for modelling of fracture and for strength analysis of solids in which defects are originated after loading. The theory of superimposed finite strains describes multi-stage loading of bodies. Some states (configurations) of a body are considered, and it is assumed that the body passes from each state to the next one after the application of external forces to this body, or after removal of a part (parts) of the body, or after changing of material properties in a part (parts) of the body (the origination of inclusions) [10], or after the junction of parts of the body [6]. The problems of superimposed finite strains can be solved analytically [2, 3, 4, 10] or numerically [5]. An effective method for approximate analytical solution of these problems is the Newton–Kantorovich method [1]. This method reduces the solution of a nonlinear problem to the solution of a sequence of linearized problems. If the modified Newton–Kantorovich method is used, these linearized problems can be solved analytically using the Kolosov– Muskhelishvili technique [9]. However, there is a need for some transformations of equations and boundary conditions. These transformations permit one to obtain functions in right parts of linearized equations and boundary conditions in a form that admits analytical integration. These transformations are considered in detail in this paper, and some numerical results are presented. Consider now the mechanical statement of problems of stress distribution around holes that are originated in preliminarily strained bodies [3]. 2 Problem statement Assume large plane static strains and stresses are brought about by external forces in a non-linear elastic body that was in the initial (unstressed) state. The body passes to the first intermediate state. Then a closed surface is imagined in the body, and its contents, bounded by this surface, is removed, and the effect of the removed part of the body on the remainder is replaced by forces, distributed over this surface. This transformation doesn’t change the stress The Newton–Kantorovich method in plane elasticity 2791 and strain states in the body. Then these forces, changed to the category of external forces, are reduced to zero quasistatically. It raises large strains and stresses that are superimposed on the large initial strains and stresses already existing in the body. The body passes to the final state. The shape of the introduced boundary surface is changed, and one can predict the shape of this surface either in the intermediate state or in the final state, and these two problems are different. The following notation is used in the theory of superimposed finite strains. · is the sign of tensor contraction, : is the sign of double tensor contraction, I is the second-rank identity tensor. The states are numbered consecutively from 0 (the initial state) to N (the final state). The states from 1 to N − 1 are considered as intermediate states. n ∇ is a gradient operator in coordinates of the n-state; n R is the position vector of a particle in the n-th state; n Γ is a boundary of a body in the n-state; un+1 (t) is a displacement vector defining the transition from the n-th state to (n + 1)-th state; Ψm,n is the deformation gradient in transition from the m-th state to the n-th state; 1 + ∆m,n is the relative volume variation in transition from the m-th state to the n-th state; Gm,n = Ψm,n · ΨTm,n is a tensor defining the strains associated with the transition of a body from the m-th state to the n-th state (the generalization of the Cauchy–Green deformation tensor); Fm,n = ΨTm,n · Ψm,n is a tensor defining the strains associated with the transition of a body from the m-th state to the n-th state (the generalization of the Finger deformation tensor); σ 0,n is the total true stress tensor for the n-th state; m S0,n+1 is the generalized stress tensor in the base of the m-th state under transition from the initial state to the (n + 1)-th state; at m = 0, this tensor is the second Piola–Kirchhoff stress tensor; p0,n is the Lagrange multiplier for the n-th state. For simplicity we consider only the problems of creation (origination) of one hole, when there is the single superposition of finite strains. The contour shape can be given at the moment of creation or at the final state. Let us assume that the mechanical material properties are described by Mooney [8] potential. The initial strains are assumed to be homogeneous. Let us give the problem statement in concerned cases. 1. The hole shape is given at the moment of creation. 2792 Vladimir Levin and Konstantin Zingerman The equilibrium equation: 1 1 ∇ · Σ0,2 · Ψ1,2 = 0 . (1) (the incompressibility constraint is taken into account). The incompressibility constraint: 1 + ∆0,1 = 1 , 1 + ∆1,2 = 1 . Boundary conditions: 1 1 1 −1 ∗ −1 N2 · Σ0,2 1 = −P 1 + ∆0,2 N2 · Ψ1,2 · Ψ1,2 , (2) (3) Γ2 σ 0,2 |∞ = σ ∞ 0,2 . (4) The relation between the true stress tensor and the total stress tensor is the following [subject to the incompressibility constraint (2)]: 1 −1 ∗ −1 Σ0,2 = Ψ1,2 · σ 0,2 · Ψ1,2 . (5) Constitutive equations: µ (1 + β)F0,n + (1 − β) (F0,n : I) F0,n − F0,n 2 − σ 0,n = 2 − p0,n I (n = 1, 2) , (6) where F0,n = Ψ∗0,n · Ψ0,n (n = 1, 2) . (7) Geometric equations: 1 + ∆0,1 = det Ψ0,1 , 1 + ∆1,2 = det Ψ1,2 , Ψ0,2 = Ψ0,1 · Ψ1,2 , 1 Ψ1,2 = I + ∇u2 . (8) (9) (10) 2. The hole shape is given at the final state. The equilibrium equation: 2 ∇ · σ 0,2 = 0. (11) The incompressibility constraint: 1 + ∆0,1 = 1 , 1 + ∆1,2 = 1 . (12) The Newton–Kantorovich method in plane elasticity 2793 Boundary conditions: 2 N2 · σ 0,2 2 = −N2 P, (13) σ 0,2 |∞ = σ ∞ 0,2 . (14) 2 Γ2 Constitutive equations: σ 0,n = µ (1 + β)F0,n + (1 − β) (F0,n : I) F0,n − F0,n 2 − 2 − p0,n I (n = 1, 2) , (15) where F0,n = Ψ∗0,n · Ψ0,n (n = 1, 2) . (16) Geometric equations: 1 + ∆0,1 = det Ψ0,1 , 1 + ∆1,2 = det Ψ1,2 , Ψ0,2 = Ψ0,1 · Ψ1,2 , −1 2 Ψ1,2 = I − ∇u2 . 3 (17) (18) (19) Application of the Newton-Kantorovich method to the problem solving Let us consider the application of the Newton-Kantorovich method [1] to the solution of the problem of stress concentration near the hole, which is originated in the previously loaded body made of nonlinearly elastic material in the case of finite strains. In this section the following additional notation is used. The upper index in parentheses denotes the number of approximation. (i) un is the i-th approximation for displacement vector un , characterized the conversion from the (n − 1)-th to the n-th state; b (i) u n is the correction to the displacement vector un in the (i + 1)-th approximation; (i) pbn is the correction to the Lagrange multiplier p0,n in the (i + 1)-th approximation (for incompressible materials); k ∇ is the gradient in the base of the k-th state; ∇ is the gradient in the base of the state, in which coordinates the problem is solved; Γn is the body border in the n-th state in coordinates of the state, in which the problem is solved; 2794 Vladimir Levin and Konstantin Zingerman Nn is the normal to Γn ; Ψ(i) q,p is the i-th approximation for the displacement dyadic Ψq,p ; (i) Fm,n is the i-th approximation for the tensor measure of deformation Fm,n , described the the strain changing in going from state m to n and corresponds to the Finger measure; (i) ∆m,n is the i-th approximation for the relative change of the volume ∆m,n in going from the m-th to the n-th state; (i) σ 0,n is the i-th approximation for the true stress tensor σ 0,n , described the cumulative stresses in the body in going from the initial to the n-th state; m (i) m Σ 0,n is the i-th approximation of the generalized stress tensor Σ 0,n (total for the n-th state), defined in coordinate base of some m-th state; L[u, p] = µ(1 − β)(∇ · u)I + µ(∇u + u∇) − pI; (i) fn is the vector of the fictitious body forces for the i-th approximation; (i) Qn is the vector of the fictitious surface forces, applied to the hole borders, for the i-th approximation. Let us modify the relations in the statement of considered problems to avoid the necessity to inverse tensors and to divide some expressions by scalar functions in the process of implementation of the Newton–Kantorovich method. Functions of complex structure will appear in the right-hand parts of the linearized equations at each step of the Newton-Kantorovich method, if we do not modify the statement of problems. These functions are not analytically integrable. The Cayley–Hamilton theorem [7] can be used to realize these modifications. According to this theorem, the following identity is true for any nonsingular second-rank tensor T: 1 1 1 2 2 2 −1 T − (T : I) T + (T : I) I − T :I I . (20) T = det T 2 2 Consider now the modifications of the problem statement for two cases considered below. 1. The hole shape is given at the intermediate state. Using (20) and taking into account the incompressibility constraint det Ψ1,2 ≡ 1, one can write 1 1 2 −1 2 2 Ψ1,2 = Ψ1,2 − (Ψ1,2 : I) Ψ1,2 + (Ψ1,2 : I) I − Ψ1,2 : I I . (21) 2 2 The substitution of the last equation in the relation (5) and the boundary condition (3) results to the modified version of the problem statement. The obtained equations do not contain negative powers of tensors and scalar functions. 2. The hole shape is given at the final state. The following notation is used in this case: 2 Ψ2,1 = I − ∇u2 , (22) 2795 The Newton–Kantorovich method in plane elasticity then the relation (19) can be written in the form Ψ1,2 = Ψ2,1 −1 . Taking into account the Cayley–Hamilton theorem and the incompressibility constraint, one can write the last equation as follows: 1 1 2 2 2 Ψ2,1 : I I . (23) Ψ1,2 = Ψ2,1 − (Ψ2,1 : I) Ψ2,1 + (Ψ2,1 : I) I − 2 2 Replacement of the relation (19) by (22), (23) results to the equations of the modified problem statement. These equations do not contain negative powers of tensors and scalar functions. The modified Newton-Kantorovich method is used to solve the considered problems [1]. The modified Newton-Kantorovich method is chosen because the unmodified version of this method requires to solve a linearized problem with the coordinate-dependent modulus of elasticity on each step of this method, with the except of the first step. It is difficult to solve this linearized problem by analytical methods. The initial approximation is chosen as follows: (0) u1 = 0 , (0) p1 = 0 , (0) u2 = 0 , (0) p2 = 0 (24) The problem of calculation the initial strains Ψ0,1 by the given initial stresses is reduced to the solution of the system of nonlinear algebraic equations, because initial strains are homogeneous. The solution of this system by the modified Newton-Kantorovich method is so simple that there is no necessity to consider it in detail. The initial approximation for this system is chosen (0) as follows: Ψ0,1 = I. Consider now the problem of calculation of stress strain state in the vicinity of the hole, i.e. the problem of finding of u2 . Choosing th initial approximation in the form (24), one can write the linearized problem for the (i + 1)-th approximation of the modified Newton-Kantorovich method in the following way: h i k (i) b (i) , p b = f (i) , ∇·L u 2 2 (i) b 2 = h(i) ∇·u h i k (i) (i) b 2 , pb2 k = Q(i) , N2 · L u (25) (26) (27) Γ2 h i (i) b (i) L u , p b 2 2 ∞ (i) ∞ = σ 0,2 , In relations (25)–(28) L[u, p] is a linear operator: (28) 2796 Vladimir Levin and Konstantin Zingerman L[u, p] = µ(1 − β)(∇ · u)I + µ(∇u + u∇) − pI; k is the number of state, in which coordinates the problem is solved (if the hole shape is given at the intermediate state then k = 1, and if in the final (i) b (i) state then k = 2); u b2 are the corrections to the solution in the (i + 1)-th 2 , p approximation. After their calculation this approximation is defined by the formulae (i+1) (i) (i+1) (i) (i) b (i) u2 = u2 + u p2 = p2 + pb2 . (29) 2 , Let us notice that the general form of the linearized boundary-value problem, solved for each approximation, is the same as in case of perturbation method. Only functions in the right parts of the equations and the boundary conditions differ. Consider the formulae to determine these functions for each case concerned in this section. 1. The hole shape is given at the moment of its creation. In this case the relations (1)–(10) with (21) result to 1 (i) 1 (i) (i) f = −∇ · Σ0,2 · Ψ1,2 , (i) h(i) = 1 − det Ψ1,2 , 1 1 (i) 1 (i) ∗ (i) Q(i) = −N2 · Σ0,2 − P N2 · Ψ2,1 · Ψ2,1 , where (i) σ 0,2 = h io µn (i) (i) (i) 2 (i) (1 + β)F0,2 + (1 − β) F0,2 : I F0,2 − F0,2 − p0,2 I , 2 1 (i) (i) ∗ (i) (i) Σ0,2 = Ψ2,1 · σ 0,2 · Ψ2,1 , (i) ∗ (i) (i) Ψ2,1 = (i) 2 (i) Ψ1,2 − Ψ1,2 (i) (i) F0,2 = Ψ0,2 · Ψ0,2 , 1 (i) 2 1 (i) 2 (i) : I Ψ1,2 + Ψ1,2 : I I − Ψ1,2 : I I , 2 2 (i) 1 (i) Ψ0,2 = Ψ0,1 · Ψ1,2 , (i) Ψ1,2 = I + ∇u2 . 2. The hole shape is given at the final state. As follows from the relations (11)–(18), (22), (23) in this case 2 (i) f (i) = −∇ · σ 0,2 , (i) h(i) = det Ψ2,1 − 1 , 2 (i) 2 Q(i) = −N2 · σ 0,2 − N2 P , 2797 The Newton–Kantorovich method in plane elasticity where (i) σ 0,2 h io µn (i) (i) (i) (i) 2 (i) (1 + β)F0,2 + (1 − β) F0,2 : I F0,n − F0,n − p0,2 I , = 2 (i) (i) ∗ (i) (i) (i) F0,2 = Ψ0,2 · Ψ0,2 , Ψ0,2 = Ψ0,1 · Ψ1,2 , 1 (i) 2 1 (i) 2 (i) (i) 2 (i) (i) Ψ1,2 = Ψ2,1 − Ψ2,1 : I Ψ2,1 + Ψ2,1 : I I − Ψ2,1 : I I , 2 2 (i) 2 (i) Ψ2,1 = I − ∇u2 . These relations (together with the relations that are used for solution of the linearized problems) underlie the algorithm of the solution of the boundaryvalue problems (1)–(10), (11)–(19) by the modified Newton–Kantorovich method for the case in which the hole contour can be mapped conformally on the unit circumference using the functions of the form ω(ξ) = β−1 ξ + β0 + β1 ξ −1 + · · · + βn ξ −n . (30) The detailed approach to the solution of linearized problems is considered in [4]. 4 Results Let us give the results of the calculation of the stress strain state in the vicinity of the hole, that is originated in the previously loaded body and has the circular shape at the final state, as an example. Initial uniaxial load is applied in the direction of y axis: (σ0,1 )11 = (σ0,1 )12 = 0, (σ0,1 )22 = p, p/µ = 0.7, β = 1. Fiures 1, 2 show the distribution of stresses along the x axis. R is the hole radius in the final state. The characters 1–4 are approximation numbers. One can see from the figures that the difference between the third and the fourth approximation is small. In addition, it is clear that significant nonlinear effects take place, especially in the vicinity of the hole. The correction for nonlinear effects for the stress σ22 is about 65 % at the point of maximal stress concentration (x = R). 5 Conclusion The approximate analytical method is developed for solution of a class of nonlinear elasticity problems of stress distribution near holes originating in preliminarily strained infinite bodies. This method is based on the modified Newton–Kantorovich method and the Kolosov–Muskhelishvili technique. The transformation of differential equations permits one to to obtain functions in 2798 Vladimir Levin and Konstantin Zingerman Figure 1: Distribution of true stress σ11 along the x axis. Figure 2: Distribution of true stress σ22 along the x axis. right parts of linearized equations in a form that admits analytical integration. Some numerical results show the reliability of the proposed approach. Acknowledgements. The research for this article was performed in FIDESYS LLC and financially supported by the Russian Ministry of Education and Science (project No. 14.579.21.0007, project ID RFMEFI57914X0007). References [1] L.V. Kantorovich, G.P. Akilov, Functional Analysis, Second Edition, Pergamon Press, Oxford, 1982. [2] V.A. Levin, Theory of repeated superposition of large deformations. Elastic and viscoelastic bodies, International Journal of Solids and Structures, 35 The Newton–Kantorovich method in plane elasticity 2799 (1998), 2585–2600. http://dx.doi.org/10.1016/s0020-7683(98)80032-2 [3] V.A. Levin, K.M. Zingerman, Interaction and microfracturing pattern for successive origination (introduction) of pores in elastic bodies: finite deformation, Journal of Applied Mechanics, 65 (1998), 431–435. http://dx.doi.org/10.1115/1.2789072 [4] V.A. Levin, K.M. Zingerman, A class of methods and algorithms for the analysis of successive origination of holes in a pre-stressed viscoelastic body. Finite strains, Communications in Numerical Methods in Engineering, 24 (2008), 2240-2251. http://dx.doi.org/10.1002/cnm.1080 [5] V.A. Levin, K.M. Zingerman, A.V. Vershinin, E.I. Freiman, A.V. Yangirova, Numerical analysis of the stress concentration near holes originating in previously loaded viscoelastic bodies at finite strains, International Journal of Solids and Structures, 50 (2013), 3119–3135. http://dx.doi.org/10.1016/j.ijsolstr.2013.05.019 [6] V.A. Levin, L.M. Zubov, K.M. Zingerman, An exact solution for the problem of flexure of a composite beam with preliminarily strained layers under large strains, International Journal of Solids and Structures, 67–68 (2015), 244–249. http://dx.doi.org/10.1016/j.ijsolstr.2015.04.024 [7] A.I. Lurie, Nonlinear Theory of Elasticity, North-Holland, Amsterdam, 1990. http://dx.doi.org/10.1016/c2009-0-08829-1 [8] M.A. Mooney, Theory of large elastic deformation, Journal of Applied Physics, 11 (1940), 582–592. http://dx.doi.org/10.1063/1.1712836 [9] N.I. Muskhelishvili, Some Basic Problems of the Theory of Elasticity, Noordhof, Groningen, 1953. [10] K.M. Zingerman, V.A. Levin, Redistribution of finite elastic strains after the formation of inclusions. Approximate analytical solution, Journal of Applied Mathematics and Mechanics, 73 (2009), 710–721. http://dx.doi.org/10.1016/j.jappmathmech.2010.01.011 Received: August 8, 2016; Published: September 17, 2016