Six-phase electrically excited synchronous generator for more
advertisement

2016
International Symposium on Power Electronics,
Electrical Drives, Automation and Motion
Six-Phase Electrically Excited Synchronous Generator
for More Electric Aircraft
Mohammed Alnajjar
Universität der Bundeswehr München, Germany
Mohammed.Alnajjar@unibw.de
Dieter Gerling
Universität der Bundeswehr München, Germany
Dieter.Gerling@unibw.de
mandatory for the DC power system of the aircraft because
the three-phase supply does not fulfill the requirements of
the current harmonic limits defined by the aircraft standard.
Nevertheless, there is an intention to eliminate the TRU
which produces high core losses, in particular at high
electrical frequencies. An additional advantage of avoiding
this complex transformer configuration is the reduced weight
and cost [7]. Recently, multiphase machines have become an
important alternative in variable speed power generation,
especially on the aircraft where the significant reduction of
the current harmonics is one of the main reasons to deploy
the multiphase machine technology [8], [9]. Another reason
for the viable importance of the power generation using
multiphase machines to be applied to the aircraft is their
fault-tolerance and the ability to continue operation in the
case of a failure of one or more phases [9], [10].
Furthermore, dividing the supply current to a higher number
of phases leads to a reduced per-phase current which is an
important aspect of having a reduced rating of the
semiconductor switches of the power electronic converter
[9]. The increased interest of the aircraft industry in
multiphase machines results in the need for detailed
investigation of such machines for the power generation on
the aircraft. As a consequence, an electromagnetic design of
the multiphase aircraft generator is necessary for addressing
the possibilities of their use for the aircraft power generation.
The generator is subject to a variable speed operation since
the rotational speed of the aircraft engine changes during
different flight phases. In addition, the voltage stability of
the power system needs to fulfill the transient limits defined
by the standard mentioned above. Therefore, the
electromagnetic design has to take the machine parameters
into consideration since they influence the control of the
generator drive system and the quality of the power
conversion. The power rectification is utilized using a PWM
voltage source inverter (VSI) in order to obtain the output
DC power [13]. The choice of the electrical generator for
aircraft application is an important factor for addressing the
performance of the entire electrical power system. Although
the induction machines (IM) are characterized by the
robustness, fault-tolerance, and the high reliability, they are
not recognized as a good candidate for the aircraft power
generation due to the low power density and the low
performance at a high-speed operation [11], [12]. On the
other hand, the switched reluctance machines (SRM) have a
robust structure and they can operate over a wide speed and
a high temperature in addition to their fault-tolerance.
However, the main disadvantages of the SRM are the low
power density, higher rating of the power electronic
converter, and the high torque ripple and acoustic noise [11],
[12]. Synchronous machines are widely used for the power
generation systems. The permanent magnet (PM)
synchronous machines possess the characteristics such as the
high power density and the high efficiency. Though, the PM
Abstract—This paper proposes an electromagnetic design of
an asymmetrical six-phase salient-pole synchronous generator
for the aircraft power system. The generator is coupled to the
aircraft engine and it is connected to 270V DC bus via a dual
three-phase voltage source inverter. An electrical excitation
current is fed to the rotor coil in order to produce the induced
voltage in the stator windings. The external excitation possesses
the advantage of controlling the output voltage by adjusting the
excitation current. The generator is designed based on the
performance of the synchronous machine at different load
conditions and at different rotor speeds. In order to achieve an
improved performance and an increased efficiency of the
machine, the design of the stator windings and the rotor
geometry is studied. The selection of the windings topology and
the number of stator slots is discussed where the requirements
of the aircraft variable speed generator are considered. The
electromagnetic design of the machine is implemented and the
Finite Element Method is used to analyze the performance of
the machine. The control system of the DC bus voltage is
discussed based on the machine characteristics obtained from
the simulation based on Finite Element Method. The crosssaturation of the machine is considered at overload condition.
Index Terms—Aircraft power generation, asymmetrical sixphase synchronous machine, variable speed operation, dual
three-phase voltage source inverter, cross-saturation.
I. INTRODUCTION
In More Electric Aircraft (MEA), a significant weight
reduction can be achieved by replacing various conventional
power systems with one electrical system supplying the
power to various electrical actuating elements [1]. However,
this advancement requires higher electrical power generation
on the aircraft [2]. The aircraft jet engine has an electric
generator coupled to the engine shaft, and it operates under
different operating conditions. In the generation mode, a
variable speed operation is utilized since for a DC power
system, the power is rectified and delivered to a 270V DC
power system of the airplane [1], [3]. By using a variable
speed generator with a DC power system, the constant speed
gearbox is eliminated and thus further reduction of both
weight and cost can be achieved [4]. In addition, the weight
of the wiring harness of the power distribution can be
reduced since only two cables are needed for the power
transmission, especially in commercial aircraft in which the
distance to transmit power is very long. For the DC power
distribution on the aircraft, the output power is subject to
very strict limits defined by the standard MIL-STD 704F
regarding the harmonics content. It was proven that the
minimum requirement for the power rectification is a 12pulse rectifier in order to fulfill these limits [5], [6]. In the
power system of the conventional aircraft, a transformer
rectifier unit (TRU) is utilized in order to transform the
power from a three-phase generator supply to a six-phase
supply for the 12-pulse rectifier [7]. Therefore, the TRU is
978-1-5090-2067-6/16/$31.00 ©2016 IEEE
7
Nevertheless, the 5th and 7th harmonic components exist in
the current, and they are limited only by the impedance of
the stator [22]. However, it is possible to suppress these
current harmonics of the six-phase stator by the power
converter itself without using harmonic filters [22]. The
elimination of these harmonic components leads to an
improved performance of the six-phase machine which
makes it suitable for the aircraft power generation where the
harmonic components of the current are subject to standard
limits [19]. The analysis of the harmonic fields is carried out
using a mathematical formulation and the result is validated
by applying the Finite Element Method (FEM) simulation.
The geometrical parameters of the machine are of a major
concern in the determination of the resultant flux density
distribution. Analytically, the flux density distribution is
calculated by the multiplication of the permeance wave Λ
and the MMF wave Θ as it is shown in the expression [19],
[20]:
machines with the conventional design are claimed to have
inferior fault tolerance in comparison with the other
machines. Furthermore, the high temperature has an
anticipated influence on the degradation of the permanent
magnets [11], [12]. Thus, the generator considered in this
study is an asymmetrical six-phase electrically excited
synchronous generator operating at a variable rotor speed
and variable load conditions. Compared with the PM
synchronous generator, the electrically excited synchronous
generator possesses the advantage of safety because the field
excitation can be removed in the case of a critical failure of
the generator.
II. MODELLING OF THE ASYMMETRICAL SIX-PHASE
SALIENT-POLE MACHINE
The choice of the winding layout of the stator of the
electrical machine is of the utmost importance for the
machine performance. The design of the electric generator is
usually based on the aim of having a stator topology that
yields to an approximation of sinusoidal output voltage and
current with relatively low harmonics content [13]. As the
machine is meant for the aircraft power generation, the
winding topology is one of the major design aspects in order
to achieve the desired performance. The magnetomotive
force (MMF) distribution should be as close as possible to
the sinusoidal waveform [14]. Therefore, the design theory
has to take into account the space harmonics of the MMF
distribution in the air-gap [15]. The MMF wave produces the
air-gap flux which usually contains various harmonic
components [19]. Recently, a higher number of phases is
taken into consideration in order to obtain a reduced
harmonics content and hence, improve the machine
performance [9], [21]. It has been shown that in multiphase
machines, due the increased number of phases of an AC
machine to more than three, the machine losses produced by
the 5th and 7th current harmonics can be reduced [16]. The
winding arrangement of the stator needs special thoughts in
order to find an armature topology that collects the back
EMF in the most effective manner [18]. Because the induced
back EMF for the integral slot distributed winding is higher
than it is for other winding topologies, this winding layout
constitutes a very good choice since the machine is supposed
to operate as a generator. On the other hand, distributed
winding have the advantage that the MMF wave is nearly
sinusoidal [19], [20]. In order to combine the advantages of
having an improved MMF distribution and the faulttolerance, the six-phase winding have been chosen for the
design of the aircraft generator. In six-phase machines,
asymmetrical winding configuration is usually considered
[19]. In this winding configuration, there are two three-phase
winding sets that share the same magnetic circuit. In this
configuration, the machine winding are distributed around
the stator so that the three-phase sets of winding are
displaced by an electrical angle of 30o [19]. The winding
factors of the 5th and 7th MMF harmonic components in the
six-phase machine are higher than those for a counterpart
three-phase machine [23]. However, these harmonic
components do not contribute in the resulting air-gap flux
because they cancel each other since they act in opposite
directions [21]. Therefore, for a six-phase generator the
harmonics of order 6n±1 (n=1, 3, 5, etc.) will not have
influence on the resulting air-gap flux of the machine [22].
This leads to an improved efficiency of the multiphase
machine when the asymmetrical six-phase stator is used.
B (ε , t ) = Λ ⋅ Θ(ε , t )
(1)
B is the flux density of the machine, ε is the angle on the
circumference, and t is the time. The permeance Λ is given
by:
μ A 1
(2)
Λ= o ⋅
g (ε , t ) A
μo is the magnetic permeability of air, g is the air-gap length
and A is the cross-section. It is important to consider the fact
that the permeance wave Λ depends on the geometry of the
machine, and its harmonics content is affected by the slotting
of the stator. In addition, the permeance wave Λ is also a
function of the pole symmetry [19]. For the calculation of
the flux density distribution that is given by (1), the
permeance wave Λ is multiplied by the resultant MMF wave
which results from the stator winding. The MMF wave
contains higher order harmonics that vary with the winding
arrangement in the stator. In (1), the resultant MMF wave Θ
for the asymmetrical six-phase stator with two three-phase
sets of winding that are displaced by 30o is written as [19]:
2π
π
∞
∞
j ( m−k )
j ( m+ k )
w
6
3
Θ(ε , t ) = { wv (1 + e
+
)[1 + e
(3)
2
m = −∞ k =1
e
− j ( m −k )
2π
3
]ik e j ( kωt −mα ) }
wwv is the winding factor with the harmonic order v and ik is
the current with the time harmonic order k. Eq. (3) shows
that the space harmonics in the air-gap that result from the
current supply are of the order 1, -11, 13…etc. The equation
also shows that the order of the space harmonic components
that can be suppressed depends on the phase shift between
the two sets of winding of the six-phase stator. As it has
been mentioned earlier, in the case of 30o phase shift, the
harmonic components of the order -5 and 7 cancel each other
since they are rotating in the opposite directions, each
relative to the synchronous speed. This means that these
harmonic components do not have an impact on the
pulsations of the electromagnetic torque of the machine [19].
III. FEM ANALYSIS OF THE ASYMMETRICAL SIX-PHASE
SALIENT-POLE MACHINE
The design of the machine geometry has been created based
on the basic mathematical formulations that determine the
size of the machine taking into consideration the rated power
and the rotor speed. The choice of the material of the core
8
lamination is made based on the use of high specific
resistivity in order to have reduced core losses. The material
used for the aircraft generator is the fully processed M19
grade, 29 gage lamination material with inorganic C5
coating that typically has a core loss of 1.58W/Ib at 15kg.
This material usually has 3-6% silicon content higher than
the commercially used M45 grade for other industrial
applications [15]. The rated power required for the prototype
of this application is 60 kW. The generator operates in a
variable speed range, i.e. the speed varies between 6000 rpm
and 12000 rpm for the generator operation. Therefore, the
rotor is designed with 4-poles in order to achieve a
frequency range of 200-400Hz for the above mentioned
speed range. A higher number of poles is not desirable since
the machine iron losses increase at higher frequencies, which
implies that a complex cooling method should be
implemented. The slotting of the stator is utilized so that the
stator MMF distribution that is nearly sinusoidal can be
achieved. The slots produce harmonics that are stationary
with respect to the winding [15]. In order to guarantee equal
output voltages of all the phases, an integral number of slots
per phase is chosen [16]. The stator of the machine is
designed with 48 slots which constitutes the minimum
number of slots required for a six-phase machine in order to
realize an MMF distribution close to the sinusoidal wave [9].
The waveform based on the estimated values of the MMF
wave is shown in Fig. 1.
improved flux density distribution along the pole face is
achieved. For designing the rotor of the salient-pole
machine, special attention is paid to produce somewhat
sinusoidal flux density distribution by using a non-uniform
air-gap along the periphery of the pole face. In general, the
radial air-gap dimension is larger near the pole tips than at
the pole centerline [15]. This design consideration has the
benefit of reducing the slot harmonics since the air-gap is
larger at the pole tip having an increased magnetic
reluctance. The air-gap flux determines the flux density level
in the stator teeth and in the iron core of the stator. In
addition, the flux density in the core contributes to the
ampere-turns of the field winding required to pass the flux
through the air-gap for a given current excitation of the rotor
and the stator windings [15]. Therefore, the air-gap is
designed in order to have a reduced number of the ampereturns of the rotor field winding. The aim of the design of the
generator is to have the flux density distribution in the airgap that leads to a higher total flux per pole for a given
fundamental waveform. This requires more cross section of
the iron core of the pole body [15]. The pole body is
designed so that the flux density at the root of the pole is
limited to Bp=2.0T where the leakage factor of 1.25 is
considered for calculating Bp. The flux density distribution
of the generator under full load operation and at rotor speed
of 6000 rpm is shown in Fig. 2.
Fig. 1 MMF wave of the asymmetrical six-phase synchronous generator
with two windings sets with a phase displacement of 30o
Fig. 2 Flux density distribution of the asymmetrical six-phase generator
under full load operation and at rotor speed of 6000 rpm
The machine has the six phases u1, v1, w1, u2, v2 and w2
with the coils that are wound and inserted in the stator slots.
In order to achieve an additive back EMF, the coils are
wound is such a way that the coil sides are one pole-pitch
apart. Although the significant harmonic components of the
stator current do not contribute in the air-gap flux in the
asymmetrical six-phase stator, it is beneficiary to design the
stator winding in such a way that these harmonic
components are reduced where the voltage and the current
waves are improved. The short-pitch winding design of the
stator allows to partially compensate these harmonic
components. The short-pitch distributed winding with a pitch
factor of 5/6 is chosen for the six-phase aircraft generator.
The model of the six-phase salient-pole synchronous
machine has been developed based on two three-phase
winding sets with delta-winding configuration. This winding
connection is utilized due to reliability reason and due to the
relatively low supply voltage level of the generator. The
rotor is designed in such a way that the rotor flux is utilized
by the field winding using DC current excitation that can be
supplied using a rotary transformer. The flux density
distribution of the synchronous machine in the air-gap is
produced by the excitation of the stator and the rotor
depending on the load condition. The air-gap flux density is
influenced by the geometry of the rotor, effective air-gap
length, the stator slots, and the winding configuration [17].
In the synchronous machine with a salient-pole rotor, the
shape of the pole shoe is designed in such a way that an
In the electrically excited salient-pole synchronous machine,
the rotor coils are excited by an external DC current and
hence, a voltage is induced in the stator winding. In the
generator operation of the salient-pole synchronous machine,
the loading produces a deviation of the rotor from the
synchronous speed and that causes the stator flux to change.
The winding coils of the stator react by opposing the change
in the flux by generating induced currents [27]. For the
power generator, the induced voltage together with the stator
impedance specifies the line voltage of the generator when
the current is supplied to the load. In the six-phase generator
with two winding sets, the current is distributed into the
winding sets and the output voltage of 200V is achieved.
The induced voltage for full load operation and at the rotor
speed of 6000 rpm is depicted in Fig. 3.
Fig. 3 The induced voltage of the six-phase generator under full load
operation and at the rotor speed of 6000 rpm
Fig. 4 shows the harmonic content of the induced voltage of
the asymmetrical six-phase salient-pole synchronous
machine at the full load and at the rotor speed of 6000 rpm
obtained by the time-step FEM simulation. It can be seen
9
that the short-pitch of the stator winding 5/6 reduces the 5th
harmonic component significantly.
Ld (id , iq , i f ) =
ψ d (id , iq , i f ) −ψ f (id , iq , i f )
id
Lq (id , iq , i f ) =
(4)
ψ q (id , iq , i f )
iq
The variation of the dq-flux linkages and the dq-inductances
calculated by the FEM simulation for 20 A excitation current
is shown in Fig. 7 and Fig. 8, respectively. It should be
mentioned that when the excitation current changes, the
whole maps in the d-axis are shifted vertically.
Fig. 4 Harmonic content of the induced voltage under at the full load of 60
kW and at the rotor speed of 6000 rpm
The flux linkage of all the phases of the machine is also
calculated using the FEM simulation. The flux linkage of the
six-phase generator was obtained at the full load and at the
rotor speed of 6000 rpm. Fig. 5 shows the flux linkage of the
machine when the machine is fully loaded and at the rotor
speed of 6000 rpm. The waves of the flux linkage are shifted
by 30o in the opposite direction due to the delta-connection
of the windings [24].
Fig. 7 Flux linkage calculated for the six-phase generator
(a) d-axis; (b) q-axis
Fig. 8 Inductance calculated for the asymmetrical six-phase generator
(a) d-axis; (b) q-axis
Fig. 5 Flux linkage of the asymmetrical six-phase generator under full load
and at the rotor speed of 6000 rpm.
For a given load demand, the current of the stator and rotor
windings is adjusted so that the output RMS voltage of 200V
is obtained. The evaluation of the performance of the
machine encompasses the calculation of the copper losses in
the stator and the rotor, the iron losses estimated by the FEM
and the mechanical losses. The machine operates as a
generator, and the speed varies in the range of 6000-12000
rpm. For the aircraft application, the electromagnetic torque
of the machine depends on the load which varies during
different flight phases. The simulation is implemented for
various operating points for the generator mode, thus the
outline of the torque-speed characteristics together with the
efficiency of the machine is obtained. Fig. 9 shows the
efficiency map of the asymmetrical six-phase aircraft
generator for different load and speed operating points.
The electromagnetic torque of the machine depends on the
stator and rotor currents. The FEM simulation is performed
for the full load operation at the rotor speed of 6000 rpm. At
this speed, the rotor excitation current is 20 A. The peak
value of the current in the stator winding is 123 A for each
winding set. The electromagnetic torque of the generator at
the full load and at the rotor speed of 6000 rpm is illustrated
in Fig. 6. It can be noted that the torque ripple has a peak
value of 3.6% which is reduced when the conventional threephase machine is compared. This is one of the main
advantages of designing the aircraft electrical generator with
six-phase windings topology.
Fig. 6 Electromagnetic torque of the asymmetrical six-phase generator
under full load and at the rotor speed of 6000 rpm
For the control system, a good knowledge concerning the
inductances of the machine is required. In order to estimate
the inductances of the machine, the flux linkage of the
machine is obtained by the FEM simulation. The flux is
calculated for various operating points in which the current
of the stator varies in both axes of the dq-rotor reference
frame for different rotor current excitation depending on the
load conditions at different rotor speeds. The dq-inductances
of the salient-pole synchronous machine are calculated by
[28]:
Fig. 9 Efficiency map of the asymmetrical six-phase generator
IV. VOLTAGE CONTROL OF THE ASYMMETRICAL SIX-PHASE
GENERATOR
For the control of the six-phase machine, the decoupled dqtransformation is used where the machine inductances are
represented in the dq-frame [25], [26]. The field-oriented
control (FOC) is the mostly suited control method used for
synchronous drives because it has the benefit of the easy
decoupling of the dq-currents. For a given speed range of
10
operation, the reference value of the d-axis current is usually
set to zero in order to achieve a constant torque angle and
adjusting the field current is sufficient for the voltage
control. In this case, the machine is operated under linear
magnetic conditions and the conventional decoupling
equations of the synchronous machine are applied. As the
machine is designed for the power generation on the aircraft,
the machine must be capable of supplying a certain overload
current where the machine can reach the saturation region.
The analysis of the salient-pole synchronous machine under
this phenomenon is required when the machine has to be
overloaded for a certain time like in the aircraft power
generation. The aircraft electrical system requirement for the
MEPP defines the overload capability for the 270VDC
system by 125% for 5 minutes and 150% for 5 seconds. The
d-axis current is of a major interest when the machine is
operated under saturation especially at high rotor speed. In
the overload condition, the generator is operated with a
supply current far beyond the rated value. If the machine is
saturated, special attention must be paid to the crosscoupling effect. Hence, the cross-coupling operation is an
important aspect for the analysis of the salient-pole
synchronous machine that is operated under saturation. The
equations for the implementation of the vector control are
revised and the contribution of the cross-coupling
inductances is included. The space vector theory can be
implemented to the machine with distributed winding in
which the assumption of a sinusoidal MMF distribution can
be made. However, the flux density distribution is distorted
by the flux paths when the machine is under saturation [29].
In general, the space vector of the flux linkage of the salientpole synchronous machine is not coaxial with the space
vector of the magnetizing current [29]. This implies that the
resultant flux wave does not lay in one axis with the MMF
wave. Nevertheless, for the special case when the space
vector of the magnetizing current has only a d-axis
component or only a q-axis component, the space vector of
the flux linkage is coaxial with the space vector of the
magnetization flux. However, the distortion of the flux paths
in the case of saturation influences the magnetization
inductances of the machine and thus the performance of the
control system [29]. Fig. 10 illustrates the distribution of the
flux paths in the machine under rated load and under 150%
overload conditions. In order to analyze the voltage
equations, the equivalent circuit of the six-phase
synchronous machine in the dq-frame is shown in Fig. 11.
Fig. 11 Equivalent circuit of the six-phase salient-pole synchronous
machine in the dq-rotor reference frame
ud1, uq1 are the dq-voltages of the winding set 1 and id1, iq1 are the dqcurrents of the winding set 1 in the rotor frame. ud2, uq2 are the dq-voltages
of the winding set 2 and id2, iq2 are the dq-currents of the winding set 2 in the
rotor frame. uf is the voltage applied to the field winding, iD and iQ are the
dq-currents of the damper cage and if is the field current, all in the rotor
reference dq-frame. Rs is the stator resistance, RD, RQ are the dq-axis
resistances of the damper cage, and Rf is the resistance of the field windings.
ωe is the electrical frequency. ψd1, ψq1 are the dq-flux linkages of the
winding set 1, and ψd2, ψq2 are the dq-flux linkages of the winding set 2 in
the rotor frame. ψD, ψQ are the dq-flux linkages of the damper winding, and
ψf is the flux linkage for the field winding in the rotor frame. Lsσ is the
leakage inductance of the stator, Ldm, Lqm are the dq-axis magnetizing
inductances for one winding set of stator in the rotor dq-frame. LDσ, LQσ are
the leakage inductances of damper cage. Lfσ is the leakage inductance of the
field winding.
ψ d = Lsσ id +ψ dm
1
1
ψ q = Lsσ iq +ψ qm
(5)
ψdm and ψqm are d-axis and q-axis components of the
magnetizing flux linkages in the reference dq-frame. In the
control structure of FOC, the dq-currents are usually used as
the state variables in the model of the machine. In such a
model, the tangent-slope incremental inductances between
the d- and the q-axis are present. The voltage equations that
describe the nonlinear behavior of the machine under
saturation can be derived by applying the chain
differentiation on the magnetizing flux linkages ψdm and ψqm,
the following expression results [28]:
(6)
d (i + i + i + i )
d (i + i + i )
dψ
∂ψ
∂ψ
1
dm
dt
=
d1
dm
∂ (id1 + id 2 + i D + i f )
1
d2
D
f
+
dt
dt
=
q2
Q
dt
Ldq
Ldd
dψ qm
q1
dm
∂ (iq1 + iq2 + iQ )
∂ψ qm
d (iq1 + iq2 + iQ )
∂ (iq1 + iq2 + iQ )
dt
+
∂ψ qm
d (id1 + id 2 + i D + i f )
∂ (id1 + id 2 + i D + i f )
dt
Lqq
Lqd
It can be seen that the incremental dq-inductances Ldd and
Lqq are present in Eq. (6) and they describe the change of the
magnetization flux linkage of the machine under the
saturation condition. In addition, the cross-coupling
inductances between the d- and q-axis, and the q- and the daxis that are given by Ldq and Lqd, respectively appear in the
Eq. (6). Taking into account all the components that result
from the differentiation of the flux linkages, the following
equations of the voltages ud1, uq1 of the winding set 1 can be
derived [29]:
(7)
di
d (i + i + i + i )
d (i + i + i )
Fig. 10 Flux paths of the asymmetrical six-phase generator under rated load
and under 150 % overload operation
(a) Rated load; (b) Overload of 150% for 5 seconds
u d 1 = R s i d 1 + L sσ
d1
dt
+ Ldd
d1
d2
D
f
dt
+ Ldq
q1
q2
Q
dt
− ω e [ Lsσ iq1 + ψ qm ]
The saturation level of each axis is determined by the
amplitude of the space vector of the magnetizing current that
includes both d-axis and q-axis currents [29]. Therefore, the
flux linkages of the winding set 1 of the saturated six-phase
salient-pole synchronous machine are given by:
u q1 = Rs iq1 + Lsσ
di q1
dt
+ Lqq
d (iq1 + i q2 + iQ )
dt
+ Lqd
d (id1 + i d 2 + i D + i f )
dt
+ ω e [ Lsσ i d1 + ψ dm ]
The voltage equations of the winding set 2 are derived in the
same manner by considering the flux linkages ψd2, ψq2.
Hence, the voltages ud2, uq2 are written as:
11
u d 2 = Rsid 2 + Lsσ
did 2
dt
+ Ldd
d (id1 + id 2 + iD + i f )
dt
+ Ldq
d (iq1 + iq 2 + iQ )
dt
− ωe [ Lsσ iq 2 + ψ qm ]
u q 2 = Rsiq 2 + Lsσ
diq 2
dt
+ Lqq
d (iq1 + iq 2 + iQ )
dt
+ Lqd
d (id1 + id 2 + iD + i f )
dt
+ ωe [ Lsσ id 2 + ψ dm ]
(8)
The rotor voltage equations of the saturated salient-pole
machine can be derived using the definition given by Eq. (6).
Hence, it follows that the voltage equation for the rotor field
winding and for the damper winding in the rotor reference
frame can be expressed by:
u f = R f i f + L fσ
di f
+ Ldd
d (id1 + id2 + iD + i f )
+ Ldq
Fig. 13 Incremental and cross coupling inductances of a three-phase salientpole synchronous machine [28]
d (iq1 + iq 2 + iQ )
dt
dt
dt
d (id1 + id2 + iD + i f )
d (iq1 + iq 2 + iQ )
diD
0 = RD iD + L|Dσ
+ Ldd
+ Ldq
dt
dt
dt
d (iq1 + iq 2 + iQ )
d (id1 + id2 + iD + i f )
diQ
0 = RQ iQ + LQσ
+ Lqq
+ Lqd
dt
dt
dt
(9)
The vector diagram of the six-phase salient-pole
synchronous machine with two three-phase winding sets is
depicted in Fig. 12. It can be noted that the angle μ describes
the deviation of the space vector of the magnetization flux
linkage from the d-axis. This deviation depends mainly on
the d-axis component of the stator current that may increase
significantly under saturation when the machine is
overloaded. In this case, the incremental dq-inductances are
considerably affected. It addition, the cross-coupling
inductances Ldq and Lqd cannot be neglected [28]. Fig. 13
illustrates the effect of increasing the stator d-axis current on
the incremental inductances Ldd and Lqq, and on the crosscoupling inductances Ldq and Lqd for a three-phase salientpole synchronous machine [28]. In general, it can be
summarized that these terms vanish if space vector of the
magnetizing flux lies along the d-axis (μ≈0) or along the qaxis (μ≈90o) [29]. Nevertheless, a large q-axis current is
usually required at the 150% overload condition in
comparison with the d-axis current. Thus, the incremental
inductances Ldd and Lqq remain almost constant while the
cross-coupling inductances Ldq and Lqd are not negligible
anymore. As the cross-coupling inductances Ldq and Lqd have
negative values, the resultant vector of the current is aligned
in an axis which is less inductive and this affects the
transient operation of the generator in the case of saturation.
In order to address this effect, a transient model of the
asymmetrical six-phase salient-pole synchronous generator
with two winding sets is developed. The architecture of this
model is shown in Fig. 14.
Fig. 14 Architecture of the asymmetrical six-phase salient-pole
synchronous generator with two winding sets shifted by 30o
The use of PWM rectification with the asymmetrical sixphase generator in the aircraft provides improved DC power
output with reduced current harmonic contents and reduced
voltage ripple that have standard limits, and they are
required to move toward utilizing the high voltage DC
(HVDC) technology in the aircraft power distribution
system. The control unit of the generator has been
implemented in Matlab/Simulink using Simpower block
elements. The switching frequency of the three-phase bridge
is 12 kHz. The performance of the control system is
analyzed for the overload operation of the generator. Fig. 15
shows the DC voltage and the DC current of the saturated
asymmetrical six-phase aircraft generator for a sudden step
load of 90 kW at the rotor speed of 12000 rpm. It can be
noted that the transient behavior of the generator is affected
by the cross-coupling and the DC voltage fulfills the
standard limits when the cross-coupling effect is considered.
Fig. 16 shows the dq-currents of the saturated asymmetrical
six-phase aircraft generator for a sudden step load of 90 kW
at the rotor speed of 12000 rpm.
Fig. 15 DC voltage of the saturated asymmetrical six-phase aircraft
generator for a sudden step load of 90 kW at the rotor speed of 12000 rpm
(a) DC voltage; (b) DC current
Fig. 12 Vector diagram of a three-phase winding set of the six-phase
salient-pole synchronous generator
Up is the space vector of the induced voltage, Um is the space vector of
the magnetizing voltage and Us is the space vector of the terminal
voltage of the generator. Is is the space vector of the stator current. ψs is
the space vector of the stator flux linkage and ψ is the space vector of
m
the magnetizing flux linkage. the angle ϑ is the angle between the space
vectors of the induced voltage and the terminal voltage of the machine
and the angle φ is the phase angle.
Fig. 16 DC current of the saturated asymmetrical six-phase aircraft
generator for a sudden step load of 90 kW at the rotor speed of 12000 rpm
(a) Winding set 1; (b) Winding set 2
12
[7]
B. Sarlioglu, Advances in AC-DC Power Conversion Topologies for
More Electric Aircraft, International Transportation Electrification
Conference (ITEC), 2012, Dearborn, Michigan, USA.
[8] S. Jordan, J. Apsley, Diode Rectification of Multiphase Synchronous
Generator for Aircraft Applications, Energy Conversion Congress and
Exposition ECCE, 2011, Arizona.
[9] E. Levi, Multiphase Electric Machines for Variable-Speed
Applications, IEEE Transactions on Industrial Electronics, Vol. 55,
No. 5, May 2008.
[10] A. Cavagnino, Z. Li, A. Tenconi, and S. Vaschetto, Integrated
Generator for More Electric Engine: Design and Testing of a ScaledSize Prototype, IEEE Transactions on Industry Application, Vol.
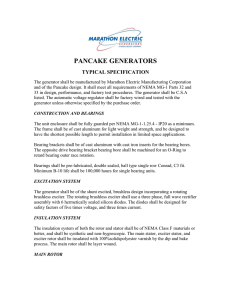
A prototype of the asymmetrical six-phase salient-pole
synchronous generator for aircraft application has been
constructed and it shown in Fig. 17. The no-load voltage of
the asymmetrical six-phase salient-pole synchronous
machine is measured at the rated speed of 6000 rpm operated
as a generator and the result is compared with the one
obtained by the FEM simulation. The measured and the
simulated no load voltages of the asymmetrical six-phase
salient-pole synchronous machine operated as a generator
are shown in Fig. 18.
49, No. 5, 2013.
[11] C. Wenping, B. Mecrow, G. Atkinson, J. Bennet, D. Atkinson,
Overview of Electric Motor Technologies Used for More Electric
Aircraft, IEEE Transactions on Industrial Electronics, Vol. 59, No. 9,
pp. 3523-3531, 2012.
[12] D. Ganev, High-Performance Electric Drives for Aerospace More
Electric Architectures, IEEE Power Engineering Society Meeting, pp.
1-8, 2007.
[13] Y. Kats, Adjustable-Speed Drives with Multiphase Motors, IEEE
international conference of Electric Machines and Drives, 1997,
Milwaukee, USA.
[14] S. Nasar, I. Boldea, Electric Machines: Steady-State Operation, 1990,
USA.
[15] H. Toliyat, G. Kliman, Handbook of Electric Motors, 2nd edition,
2004, USA.
[16] J. Riveros, F. Barrero ,EmilLevi ,M. Durán, S. Toral, and M. Jones,
Variable-Speed Five-Phase Induction Motor Drive, IEEE
Fig. 17 Prototype of the asymmetrical six-phase salient-pole synchronous
machine with electrical excitation
Fig. 18 No-load voltage of the asymmetrical six-phase generator obtained
by FEM simulation and by the measurement
V. CONCLUSION
This paper presents the guidelines for the design and the
analysis of an asymmetrical six-phase salient-pole
synchronous generator for the power generation on the
aircraft. The design is based on the definition of the winding
layout and on the geometry required for multiphase
machines. Due to the asymmetric phase displacement
between the winding sets of the machine, the 5th and 7th
harmonic components of the MMF wave have no influence
on the air-gap flux and hence, the pulsating torque is
reduced. The design has been validated using FEM
computations, and the performance of the machine has been
analyzed when the machine is operated under saturation. The
parameters of the machine have been calculated for various
operating conditions. The voltage equations of the
asymmetrical six-phase machine are derived and the crosscoupling effect is analyzed for the overload operation when
the machine is saturated. The effect of the cross-saturation
on the transient operation at the overload condition has been
studied and verified by the simulation result.
Transactions on Industrial Electronics, Vol. 60, No. 8, 2013.
[17] J. Pyrhonen, T. Jokinen, V. Hrabovcova, Design of Rotating Electrical
Machines, 2008 John Wiley & Sons, ISBN: 978-0-470-69516-6.
[18] J. Hindmarsh, Electrical Machines and Their Applications, 2nd edition,
1970, UK.
[19] I. Abuishmais, W. Arshad, S. Kanerva, Analysis of VSI-DTC Fed 6phase Synchronous Machines, 13th Power Electronics and Motion
Control Conference EPE-PEMC, 2008, Poznan, Poland.
[20] S. Toader, Combined analytical and finite element approach to the
field harmonics and magnetic forces in synchronous machines,
International Conference on Electrical Machines ICEM, 1994, Paris.
[21] J. Miller, V. Stefanovic, V. Ostovic, J. Kelly, Design Considerations
for an automotive integrated starter-generator with pole-phase
Modulation, Conference Record of the 2001 IEEE 36th IAS Annual
Meeting, vol.4, pp.2366 - 2373, 30 Sept. - 4 Oct 2001.
[22] K. Mohapatra, K. Gopakumar, V. Somasekhar, L. Umanad, A novel
Modulation Schem for a Six Phase Induction Motor with Open-End
Windings, Annual Conference of the IEEE Industrial Electronics
Society IECON, 2002, Sevilla, Spain.
[23] A. Christen, V. Haerri, Analysis of a Six- and Three-Phase Interior
Permanentmagnet Synchronous Machine with Flux Concentration for
an Electrical Bike, International Symposium on Power Electronics,
Electrical Drives, Automation and Motion SPEEDAM, 2014, Ischia,
Italy.
[24] A. Veltman, D. Pulle, R. Doncker, Fundamentals of Electrical Drives,
ISBN-10: 1-4020-5503-4, 2007.
[25] J. Karttunen, S. Kallio, P. Peltoniemi, P. Silventoinen, and Olli
Pyrhönen, Decoupled Vector Control Scheme for Dual Three-Phase
Permanent Magnet Synchronous Machines, IEEE Transactions on
VI. REFERENCES
[1]
[2]
[3]
[4]
[5]
[6]
R. E. J. Quigley, More Electric Aircraft, 8th Annual IEEE Applied
Power Electronics Conference (APEC), 1993, San Diego, USA.
K. Muehlbauer, D. Gerling, Two-Generator-Concepts for Electric
Power Generation in More Electric Aircraft Engine, International
Conference on Electrical Machines ICEM 2010, Rome.
J. Brombach, T. Schröter, A. Lucken, D. Schulz, Optimization the
Weight of an Aircraft Power Supply System through a +/-270 VDC
Main Voltage, PRZEGLĄD ELEKTROTECHNICZNY (Electrical
Review), ISSN 0033-2097, R. 88 NR 1a, 2012 .
Boeing: 787 Propulsion System, Boeing Aero Magazine, Issue 47,
2012.
J. Kang, Multi-Pulse Rectifier Solutions for Input Harmonics
Mitigation Yaskawa Electric America, 2005.
Y. Nishida, Y. Okuma, K. Mino, Practical Evaluation of Simple 12Pulse Three-Phase-Bridge Diode Rectifier of Capacitor-Input-Type,
International exhibition and conference for power electronics, PCIM
EUROPE, 2007, Nuremberg.
Industrial Electronics, Vol. 61, N. 5, 2014.
[26] H. Che, E. Levi, M. Jones, . Hew, and Na. Abd. Rahim, Current
Control Methods for an Asymmetrical Six-Phase Induction Motor
Drive, IEEE Transactions on Power Electronics, Vol. 29, No. 1, 2014.
[27] R. Doeuff, M. El Hadi Zaim, Rotating Electrical Machines, John
Wiley & Sons, ISBN: 978-1-84821-169-8, 2010.
[28] I. Jeong, J. Kim,Y. Kim and K. Nam, Extended MTPA with Cross
Coupling Inductances for Electrically Excited Synchronous Motors,
IEEE Energy Conversion Congress and Exposition (ECCE), 2013,
USA.
[29] P. Vas, Vector Control of AC Machines, Clarendon Press, ISBN: 019-859370-8, 1990.
13