Hydro-Acoustics of Piezoelectrically Driven Ink
advertisement

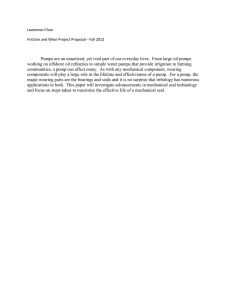
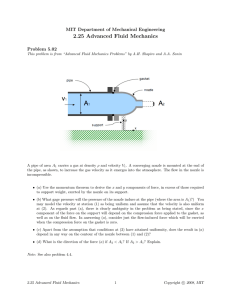
Flow, Turbulence and Combustion 61: 211–237, 1999. © 1999 Kluwer Academic Publishers. Printed in the Netherlands. 211 Hydro-Acoustics of Piezoelectrically Driven Ink-Jet Print Heads J.F. DIJKSMAN Philips Research Laboratories, Prof. Holstlaan 4, 5656 AA Eindhoven, The Netherlands Abstract. The hydrodynamical heart of an ink-jet printer is the print head, in which a large number of miniature valveless pumps are integrated. Each pump, when actuated electrically, delivers exactly one droplet of a specified flight direction, speed and size (drop-on-demand: DOD). In studies of the behaviour of miniature pumps only one pump is usually considered. The issue discussed in this paper is: do size and velocity of a droplet depend on the design of the print head? To answer this question we modelled the print head as a number of identical Helmholtz resonators, all connected to a main supply channel. The main supply channel was connected to the ink reservoir through a hose pillar and was also modelled as a Helmholtz resonator. The behaviour of such a manifold of Helmholtz resonators was analysed in both the frequency and the time domain. The paper concerns the hydro-acoustics and hydrodynamics of piezoelectrically activated ink-jet print heads. Key words: ink-jet printing, drop-on-demand, droplet formation, hydro-acoustics, multi-cavity resonances, surface tension, surface tension driven fluid oscillations. 1. Introduction The hydrodynamical heart of an ink-jet printer is the print head, in which a large number of miniature valveless pumps are integrated. Each pump, when actuated electrically, delivers exactly one droplet of a specified flight direction, speed and size (drop-on-demand: DOD) [1]. The technology of drop-on-demand print heads has developed along two main lines, which has resulted in two types of print heads referred to as bubble-jet and piezo-jet print heads. In a bubble-jet print head [2–9] each pump contains a small heating element in direct contact with the ink. When a droplet is required, the heating element is switched on. The fluid in contact with the heating element is quickly heated to a high temperature. The heat flux is so high that during the switch-on time the heat penetrates only a thin fluid layer, causing a vapour bubble to grow almost explosively at a predefined spot in the pump. This growing vapour bubble pushes a small amount of liquid at high velocity through a nozzle towards the paper [3]. Each pump in a piezo-jet print head has its own piezoelectric actuator [10–21]. When charged, the actuator deforms, causing a pressure rise in the pump that leads to droplet emission. This paper concerns the hydro-acoustics and hydrodynamics 212 J.F. DIJKSMAN Figure 1. Schematic representation of a multi-nozzle piezoelectrically actuated print head. of piezo-jet print heads. A schematic representation of such a print head is shown in Figure 1. Roughly speaking, a valveless pump consists of a pump chamber, a nozzle and a throttle. The volume of the pump chamber can be changed by a piezoelectric actuator. In the nozzle the pressure is transformed into fluid velocity and ultimately into a free-flying droplet. The throttle connects the pump chamber to the ink supply. A number of valveless pumps are connected to a common supply channel. The behaviour of a piezo ink-jet pump can be understood in general terms by regarding the pump as a Helmholtz resonator [22, 23]. The only possible resonance mode is the Helmholtz mode. The fluid in the nozzle and the fluid in the throttle move in opposite directions. As the mass of the fluid in the throttle is large compared with the amount of fluid contained in the nozzle, the fluid motion in the nozzle is dominant. There is continuous exchange between kinetic energy associated with the motions of the fluid columns in the nozzle and the throttle and potential energy stored in the compressible fluid in the pump chamber. To put it more precisely: the potential energy is stored partly in the compression or expansion of the fluid in the pump chamber and partly in elastic deformation of its environment [24]. Damping occurs as a result of viscous dissipation in the nozzle and the throttle. When the volume of the pump chamber is suddenly contracted by the piezoelectric actuator, the fluid in the pump chamber is pressurized. The portions of fluid in the nozzle and throttle are accelerated and start to oscillate. Viscous dissipation causes the oscillatory motions to dampen. Immediately after the sudden contraction, during the time interval in which the fluid velocity is directed outwards, droplet(s) may in principle be emitted. If the damping is not sufficient, more droplets can be formed afterwards. In addition to the Helmholtz frequency, a much lower frequency is observed in experiments, the so-called slosh mode [1, 25]. The portions of fluid in the nozzle and the throttle move in phase. This lowfrequency mode is determined by surface tension effects in the nozzle and, as we shall show in this paper, by the characteristics of the main supply channel. When one pump is activated the surface tension effects are dominant. The greater the number of activated pumps that are activated at the same time, the greater the influence of the characteristics of the supply channel. HYDRO-ACOUSTICS OF PIEZOELECTRICALLY DRIVEN INK-JET PRINT HEADS 213 Sometimes the actuator does not allow sudden volume contractions because it is designed so that the voltage required for the contraction causes depolarisation of the piezoelectric material. Therefore, before droplet emission, the volume of the pump chamber is first enlarged relatively slowly, after which a sudden contraction occurs. During the volume enlargement the meniscus is sucked in. Surface tension causes the meniscus to creep back to the rim of the nozzle. Due to inertia of the fluid contained in the pump the fluid swings outwards. The increasing surface tension of the expanding dome brakes the fluid motion and pushes the fluid back into the nozzle. The amount of braking and repulsion depends strongly on the wetting properties of the surface of the outside of the nozzle. An easily wetted surface has almost no braking effect, while an anti-wetted surface stops the fluid motion optimally. What is observed is a damped low-frequency motion of the meniscus. Droplet formation is strongly dependent on the position of the meniscus at the moment of sudden contraction. In comparison with a situation in which a droplet is emitted from a flat meniscus, when the meniscus is sucked in, a small droplet is formed which leaves the nozzle at a high speed. When a droplet is formed from an outflowed meniscus, the droplet will be larger and will have a lower speed. All the papers cited above discuss the hydrodynamical behaviour of a single pump. The issue we would like to discuss in this paper is: how do the size and velocity of a droplet depend on the design of the ink supply and the number of pumps connected to it? We studied this issue by modelling the print head as a number of identical Helmholtz resonators, all connected to the main supply channel. The main supply channel with hose pillar was also modelled as a Helmholtz resonator. The outline of the paper is as follows: we will start with a discussion of the dependance of droplet velocity and size on the velocity of the fluid in the nozzle and the position of the meniscus at the moment of the sudden volume contraction (Section 2). We will then discuss in Section 3 the influence of surface tension on the motion of the fluid by considering the capillary force acting on the fluid contained in the nozzle. In Section 4 we will discuss the hydro-acoustic cross-talk in a manifold comprising a number of identical ink-jet pumps all connected to the same supply channel. Finally the three partial models are integrated. In Section 5 the system behaviour of a particular design of a print head is presented. Five eigenmodes are identified and their dependence on the system design discussed. The location of the menisci at the moment of the sudden contraction depend on the number of actuators that have expanded and thus the droplet characteristics depend on the number of pumps addressed. Below, a flavour of the approach is given. The manifold is an ensemble of Helmholtz resonators. According to Rayleigh [22, chapter XVI] we can calculate the resonance frequency of a simple Helmholtz resonator as follows: s 1 A1 A2 c + , (1) fH = 2π Vc L1 L2 214 J.F. DIJKSMAN where Vc is the volume of the pump chamber and L1 and A1 are the length and cross-section of the nozzle, respectively. L2 and A2 are the length and cross-section of the throttle and c is the speed of sound corrected for the compliance of the wall [24] (for the system considered in Section 5 we find fH = 56438 Hz). For a valveless pump with a large volume of fluid in the throttle relative to the amount of fluid in the nozzle the frequency of the capillary mode can be found by considering the motion of the mass of the fluid in the throttle suspended to the capillary spring in the nozzle. The pump chamber acts as a “pressure” coupling. The frequency of the capillary mode can be inferred from [25] and the results of Section 3: s 1 8 σ 1 A2 , (2) fc = 2π π ρ0 R 4 L2 where R1 is the radius of the nozzle, σ the surface tension and ρ0 the density of the ink under ambient conditions (for the system described in Section 5 we find: fc = 7038 Hz). 2. Simplified Theory of Droplet Formation In calculating the droplet velocity and size we used the following assumptions: – droplet formation is basically the transformation of kinetic energy into surface energy [24], – droplet formation starts as soon as the fluid in the nozzle passes the front of the nozzle, – the influence of damping may be neglected during droplet formation. We did not take into account the curvature of the meniscus, but followed the mean position of the meniscus in time. This implies that we did not consider the influence of viscous and inertia effects on the shape of the meniscus. We determined the basic principles of drop formation under these assumptions. For a more detailed description, we refer to [17, 19, 26–28]. The analysis given below serves to determine the dependence of the droplet speed and volume on the initial position of the meniscus and on the Helmholtz frequency. We defined in front of the nozzle a control volume V (see Figure 2). For the analysis of the droplet formation, we simplified the motion of the fluid contained in the nozzle to: v1 = vn sin ωH t ∗ , vn (1 − cos ωH t ∗ ), x1 = x0 + ωH Zt ∗ x1 = x0 + vn 0 sin ωH t 0 dt 0 . (3) HYDRO-ACOUSTICS OF PIEZOELECTRICALLY DRIVEN INK-JET PRINT HEADS 215 Figure 2. Definition of control volume in front of the nozzle. Here x1 is the mean position of the meniscus measured with respect to the situation of a flat meniscus attached to the rim of the nozzle, v1 the velocity of the fluid in the nozzle and vn is the maximum velocity of the fluid in the nozzle as a consequence of the sudden volume contraction, x0 the position of the meniscus at the moment of the sudden contraction, ωH the Helmholtz radian frequency and t ∗ the time measured from the start of the sudden contraction. At the moment of the sudden contraction the velocity in the nozzle was zero and x1 = x0 . We started by taking x0 to be positive. The fluid is then already outside the nozzle and in the control volume. At t ∗ = 0 the fast contraction of the pump chamber started. We define the kinetic energy transported into the control volume as: 1 T (t) = ρ0 A1 2 Zt ∗ v13 (t 0 ) dt 0 . (4) 0 The area of the nozzle is denoted by A1 (if the nozzle is circular A1 = π R12 , R1 nozzle radius). Initially, the fluid moves almost like a solid cylinder inside the control volume. This cylinder follows the velocity of the fluid in the nozzle. Inside the control volume the kinetic energy of the fluid equals: 1 Td = ρ0 A1 x1 (t ∗ )v12 (t ∗ ). 2 (5) The outflowing kinetic energy is used to create the surface energy. As far as the exchange of energy is concerned, the extra free surface created after the start of the fast pulse should be taken into account. The condition for the formation of a droplet is reached as soon as the outflowed kinetic energy equals the kinetic energy of the droplet plus the extra free surface energy: T (t) = Td + σ O1 [x1 (t ∗ ) − x0 ], (6) 216 J.F. DIJKSMAN where O1 is the perimeter of the nozzle (for a circular nozzle O1 = 2π R1 ). By substituting of the expressions for the kinetic energies and making use of the fact that the term between brackets is precisely the integral over the velocity we obtain: Zt ∗ v1 (t 0 )[v12 (t 0 ) − v12 (t ∗ )] dt 0 = 2σ O1 + x0 v12 (t ∗ ). ρ0 A1 (7) 0 The right-hand side is always positive (we assumed x0 > 0), which implies that the equation just defined can only be fulfilled when the velocity has gone through a maximum value. When we consider the expression for the velocity (3) this means that ωH t ∗ > π/2. When we carry out all the integrations involved and perform some rearrangement we arrive at a quadratic equation in cos ωH t ∗ : x0 ωH 6σ O1 x0 ωH 2 ∗ ∗ 2 cos ωH t − 3 + 1 cos ωH t − +3 + 1 = 0. (8) vn ρA1 vn2 vn This quadratic equation yields one valid solution for t ∗ : t1∗ . The droplet speed and volume are thus given by: vd = vn sin ωH t1∗ , Vd = A1 x1 (t1 ) = A1 vn ∗ x0 + (1 − cos ωH t1 ) . ωH (9) Note that we have calculated the droplet speed and volume at the moment that the condition for droplet formation (6) is fulfilled. The actual droplet velocity is lower because more free surface has to be formed before a droplet can be released. Moreover, the droplet remains connected to the fluid in the nozzle by an extending fluid thread for a certain time. The force required to extend this thin fluid filament decelerates the droplet [24]. When x0 < 0, the moment that the fluid in the nozzle passes the plane of the nozzle or, in other words enters the control volume, is given by: x0 ωH . (10) cos ωH t0∗ = 1 + vn The position of the meniscus can be expressed as: x1 (t ∗ ) = vn Zt ∗ sin ωH t 0 dt 0 . (11) t0∗ This expression is most convenient for defining the energy equilibrium at the moment at which a droplet can be formed: Zt ∗ t0∗ sin ωH t 0 [sin2 ωH t 0 − sin2 ωH t ∗ ] dt 0 = 2σ O1 x1 (t ∗ ). ρ0 A1 (12) HYDRO-ACOUSTICS OF PIEZOELECTRICALLY DRIVEN INK-JET PRINT HEADS 217 This equality can only be fulfilled for π/2 < ωH t ∗ < π . Evaluation results in the quadratic equation: 6σ O1 2 cos ωH2 t1∗ − cos ωH∗ t0∗ cos ωH t1∗ − cos2 ωH t0∗ + = 0. (13) ρ0 A1 vn2 The roots of this quadratic equation are: s " # 16 3 σ O1 ∗ ∗ 1 . (14) cos ωH t1 = cos ωH t0 1+ ± 4 4 3 ρ0 A1 vn2 cos2 ωH t0∗ It is possible that two roots are found, a negative and a positive one. The negative root is the one we are looking for, because this one yields a value of ωH t1∗ > π/2. When cos ωH t0∗ > 0, the meniscus passes the front of the nozzle during the time interval in which the velocity increases. The minus sign has to be used to obtain a negative root. When cos ωH t0∗ < 0, the meniscus passes the front of the nozzle during the time interval that occurs after the velocity has passed its maximum value. In this case the plus sign must be used to obtain a negative root. This negative root is closer to −1 than cos ωH t0∗ , which results in a t1∗ larger than t0∗ . When droplet release takes place, it will happen definitely after the meniscus has passed the nozzle front. The influence of the position of the meniscus on droplet speed and size is shown in Figure 3. Note that the droplet velocity is hardly influenced by the Helmholtz frequency. The droplet volume, however, increases with decreasing frequency. It should be mentioned that vn has to be larger than a certain threshold value. This threshold value depends on the surface tension and the density of the ink and on the cross-sectional dimensions of the nozzle. 3. Capillary Force Acting on the Amount of Fluid in the Nozzle The fluid at the end of the nozzle forms a meniscus towards its environment. When the fluid in the nozzle moves outwards and remains attached to the nozzle’s rim, the meniscus bulges and a pressure drop occurs across the meniscus, opposing motion of the fluid. When the fluid moves inwards and remains attached to the rim of the nozzle, the meniscus is sucked in and again a pressure drop occurs, opposing the fluid motion. This closely resembles a springlike action. We will consider the case where the fluid moves only slightly, so that the motion of the meniscus is small relative to the radius of the nozzle R1 , as shown in Figure 4. We will neglect any viscous and inertia effects deforming the meniscus. The outflowing volume forms a spherical dome with a height h: 1 (15) A1 x1 = π h(3R12 + h2 ). 6 The radius of the dome follows from geometrical considerations: 2 → Rsph = R12 + (Rsph − h)2 = Rsph R12 + h2 . 2h (16) 218 J.F. DIJKSMAN Figure 3. Droplet speed and volume at the moment at which a droplet can in principle be formed as functions of the mean meniscus position at the moment of the sudden volume contraction. Nozzle radius 25 µm, density ρ0 = 1000 kg/m3 , surface tension σ = 0.05 N/m, amplitude of velocity in the nozzle induced by the sudden contaction vn = 5 m/s, Helmholtz frequency fH = 53993–58907 Hz. Figure 4. Shape of the meniscus and definition of relevant dimensions. HYDRO-ACOUSTICS OF PIEZOELECTRICALLY DRIVEN INK-JET PRINT HEADS 219 Using Laplace’s formula [29] we obtain the pressure drop across the meniscus from: 2σ 8π σ 8σ = x1 = 2 x1 , (17) Pcapill = Rsph A1 R1 where we have made use of the fact that h R1 . This assumption will be used throughout the development of the linear theory in the next section. Immediately after the sudden volume contraction, this assumption is however violated to a substantial extent. 4. Hydro-Acoustic Cross-Talk in a Manifold Comprising a Number of Identical Ink-Jet Pumps All Connected to the Same Supply Channel We used the set-up shown in Figure 1 to investigate the hydrodynamic cross-talk in a printer head in which a large number of small valveless pumps are integrated. As shown, n pumps were connected to a common supply channel. By charging one or more pumps pressure waves were generated in the supply channel. These pressure waves caused the fluid in the non-actuated pumps to move. Let us consider the case that k out of a total of n pumps in a head are activated at the same time. We followed the line of thought developed by Rayleigh [22, chapter XVI]. All the pumps had the same dimensions and they were all filled with the same fluid. The displacements of the fluid in the nozzle and throttle of the activated pumps will be denoted by x1i and x2i (i = 1, . . . , k), respectively, and those in the nonactivated ones by y1j and y2j (j = 1, . . . , n − k). The motion of the fluid in the hose pillar will be denoted by x3 . Motions directed towards the nozzles and outwards through the nozzles will be considered positive. The velocities of the fluid portions in the nozzle and throttle of the activated pumps will be denoted by v1i and v2i (i = 1, . . . , k), respectively, and those in the non-activated ones by w1j and w2j (j = 1, . . . , n − k). The motion of the fluid in the hose pillar will be denoted by v3 . Velocities directed towards the nozzles and outwards through the nozzles will be considered positive. All the activated pumps were loaded by the same volume change 1Vact . The excess volumes in the activated pumps 1Vci , in the non-activated pumps 1Vcj and the supply channel 1Vm are given by: 1Vm = A3 x3 − A2 k X x2i − A2 i=1 n−k X y2j , j =1 1Vci = A2 x2i − A1 x1i + 1Vact , 1Vcj = A2 y2j − A1 y1j , (18) where A1 is the cross-section of a nozzle, A2 that of a throttle and A3 that of the hose pillar. Note that a volume change is here considered positive because an excess volume caused a pressure rise. The actuator volume change 1Vact was positive as a result of a contraction. 220 J.F. DIJKSMAN The relations between excess pressures and volume changes are: pm = 2 ρ0 cm 1Vm , Vm pci = ρ0 cc2 1Vci , Vc pcj = ρ0 cc2 1Vcj . Vc (19) The pressure changes pm , pci and pcj in the main supply channel, the activated pumps and the non-activated pumps, respectively, were measured with respect to ambient pressure. The speed of sound cm in the main supply channel was corrected for the compliance of the wall [24]. The speed of sound cc in the pump chamber was adapted to the compliance of the pump chamber environment. It would go beyond the scope of this paper to discuss the background of these corrections in any detail [24]. The equilibrium conditions for the amounts of fluid in the nozzles, throttles and hose pillar are as follows: ρ0 L1 ẍ1i = pci − 8σ 1 x1i , R12 ρ0 L2 ẍ2i = pm − pci , ρ0 L1 ÿ1j = pcj − 8σ ρ0 L2 ÿ2j = pm − pcj , 1 y1j , R12 ρ0 L3 ẍ3 = −pm . (20) On combining Equations (18), (19) and (20) we obtain: 2 σ cc2 A2 cc2 1 cc A1 x ẍ1i + +8 − x = 1Vact , 1i 2i V c L1 ρ0 R12 L1 V c L1 V c L1 x2i k n−k 2 2 cc2 A2 cm cm A2 X A2 X + x2i + x2i + y2j V c L2 Vm L2 i=1 Vm L2 j =1 − ẍ3 + cc2 A1 c2 A3 c2 x1i − m x3 = − c 1Vact V c L2 V m L2 V c L2 k n−k 2 cm c2 A2 X c2 A2 X A3 x3 − m x2i − m y2j = 0, V m L3 Vm L3 i=1 Vm L3 j =1 ÿ1j + ÿ2j + − σ cc2 A2 1 cc2 A1 y +8 − y2j = 0, 1j V c L1 ρ0 R12 L1 V c L1 k n−k cc2 A2 c2 A2 X c2 A2 X y2j + m x2i + m y2j V c L2 Vm L2 i=1 Vm L2 j =1 cc2 A1 c2 A3 y1j − m x3 = 0. V c L2 V m L2 (21) All the activated pumps were charged in exactly the same way. Consequently, they all moved in the same way. The same holds for the non-activated pumps. We can leave out the indices and carry out all the summations: HYDRO-ACOUSTICS OF PIEZOELECTRICALLY DRIVEN INK-JET PRINT HEADS 221 Figure 5. Pulse shape composed of two oppositely working ramp functions applied to the system with a delay time tp . 1 cc2 A1 σ c2 A2 c2 +8 x2 = c 1Vact , x1 − c 2 V c L1 ρ 0 R1 L1 V c L1 V c L1 2 c2 A2 c2 A2 cc A2 x2 + (n − k) m 2 y2 x2 + +k m V c L2 V m L2 Vm L ẍ1 + − cc2 A1 c2 A3 c2 x1 − m x3 = − c 1Vact V c L2 V m L2 V c L2 2 cm c2 A2 c2 A2 A3 x3 − k m x2 − (n − k) m y2 = 0, V m L3 V m L3 V m L3 2 σ cc2 A2 1 cc A1 y +8 − y2 = 0, ÿ1 + 1 V c L1 ρ0 R12 L1 V c L1 2 2 cm c2 A2 A2 cc A2 y2 + k m + (n − k) x2 ÿ2 + V c L2 V m L2 V m L2 ẍ3 + − cc2 A1 c2 A3 y1 − m x3 = 0. V c L2 V m L2 (22) This set of coupled linear non-homogeneous second-order equations can be solved as follows. The sudden volume change is the consequence of two ramp functions applied to the system with a time interval tp . Such a ramp function is shown in Figure 5. The ramp function is defined by: t (23) 1Vact = 1Vmax . tp For the initial conditions we will consider the case that at t = 0 all the velocities and displacements are zero. The solution set of Equations (22) consists of a partic- 222 J.F. DIJKSMAN ular solution and the solution of the homogeneous equations. For a ramp function according to Equation (23) the particular solution reads: x1 = y1 = y2 = 0, x2 = − 1Vmax t, A2 tp x3 = −k 1Vmax t. A3 tp (24) The set of Equations (22) describes a five degrees of freedom system. When the actuator is switched on five modes are in principle touched and start to oscillate. At each resonance frequency the distribution of the motion over the different degrees of freedom is given by the components of the eigenvectors. The ξij ’s are the components of the eigenvectors of the five degrees of freedom system. The first index refers to the degree of freedom involved. The index i = 1 refers to the motion of the fluid in the nozzle and i = 2 to the motion of the fluid in the throttle of the activated pumps. The motion in the hose pillar is denoted by i = 3. The index i = 4 refers to the motion of the fluid in the nozzle and i = 5 to the motion of the fluid in the throttle of the non-activated pumps. The second index indicates the mode considered. The total solution is given by: x1 = 5 X Di ξ1i sin ωi t, v1 = i=1 5 X Di ξ1i ω1 cos ωi t, i=1 5 X 1Vmax Di ξ2i sin ωi t − t, x2 = A2 tp i=1 x3 = y1 = 5 X i=1 1Vmax t, A3 tp 5 X 5 X Di ξ3i sin ωi t − k Di ξ4i sin ωi t, w1 = i=1 y2 = 5 X i=1 v2 = 5 X Di ξ2i ωi cos ωi t − i=1 v3 = 5 X 1Vmax , A2 tp Di ξ3i ωi cos ωi t − k i=1 1Vmax , A3 tp Di ξ4i ωi cos ωi t, i=1 Di ξ5i sin ωi t, w2 = 5 X Di ξ5i ωi cos ωi t. (25) i=1 The initial condition is that for t = 0 all velocities are zero giving five equations to be solved for the unknown constants Di (i = 1, . . . , 5). To estimate the damping of the motions of the fluid set in motion by the actuated pumps, we calculated the decrease in kinetic energy in the system caused by the viscous dissipation [30]. This method may be used providing it takes several oscillations for the system to dampen down. The kinetic energy is associated with the HYDRO-ACOUSTICS OF PIEZOELECTRICALLY DRIVEN INK-JET PRINT HEADS 223 motions of the fluid columns in the nozzles, throttles and hose pillar. The greater part of the viscous dissipation also takes place in these parts. The kinetic energy is given by: 1 1 1 2 2 Ekin = k ρA1 L1 v1 + ρA2 L2 v2 + ρA3 L3 v32 2 2 2 1 1 2 2 (26) + (n − k) ρA1 L1 w1 + ρA2 L2 w2 . 2 2 We will only consider the damping of the oscillatory motions. The modes associated with the different resonance frequencies, the so-called eigenmodes, are independent and do not interact with each other. Therefore, we can investigate the damping per mode. On substitution of the expressions (25), the i-th mode contribution to the amplitude of the kinetic energy reads: 1 Ekin,i = ρωi2 Di2 k(A1 L1 ξ1i2 + A2 L2 ξ2i2 ) + A3 L3 ξ3i2 2 + (n − k((A1 L1 ξ4i2 + A2 L2 ξ5i2 ) . (27) We assume that Di is a slowly varying function of time, so the decrease in amplitude of the kinetic energy can be approximated by: 1 Ekin,t (t + 1t) = ρωi2 k(A1 L1 ξ1i2 + A2 L2 ξ2i2 ) + A3 L3 ξ3i2 2 + (n − k)(A1 L1 ξ4i2 + A2 L2 ξ5i2 ) dDi 2 × Di (t) + 2Di (t) 1t . (28) dt t =t The dissipated power per time interval 1t equals: Pdiss Z1t = [k(F1 v1 + F2 v2 ) + F3 v3 + (n − k)(F4 w1 + F5 w2 )] dt. (29) 0 The Fi ’s are the frictional forces due to viscosity in the nozzles, throttles and hose pillar. In the next section, we will derive expressions for the different Fi ’s. Here we have to discriminate between low-frequency and high-frequency behaviour. To get an impression of the nature of viscous dissipation at high frequencies we will first investigate the following simplified problem. We will consider half an infinite fluid medium occupying the space x > 0 with respect to a rectangular coordinate system OXY Z. A shear wave is generated by a harmonic motion of the plane x = 0. This is in fact the inverse of what happens in the valveless pump. There the wall is stationary and the fluid moves. The plane x = 0 (Y Z-plane) moves harmonically according to: sz (x = 0) = Z0 sin ωt, vz (x = 0) = Z0 ω cos ωt. (30) 224 J.F. DIJKSMAN The motion of the plane x = 0 induces a standing shear wave in the fluid. The only non-zero component of the velocity vector is vz = vz (x, t). The only non-zero component of the equation of motion [31–33] reduces to: ρ0 ∂ 2 vz ∂vz =η 2. ∂t ∂x (31) Following [32, 33, see also 34] the solution that satisfies the boundary condition at x = 0 and no motion at infinity reads: r ρω −κx cos(ωt − κx), κ = . (32) vz = Z0 ω e 2η As for non-stationary heat conduction [34], we can define a penetration depth of the shear wave. When x = π/κ the amplitude of the local velocity vz is reduced to 4.3% of the wall velocity. Meanwhile, the local velocity has changed sign twice. For characteristic data of the present design we find: ρ0 = 1000 kg/m3 , f1 = 3500 Hz, f2 = 55 kHz, η = 0.0024 Pa.s, κ = 6.769 × 104 m−1 , κ = 2.683 × 105 m−1 , π = 46.4 µm, κ π = 11.7 µm. κ (33) For the low-frequency mode we may safely assume that the Poiseuille equation holds true. In this case, the penetration depth is much larger than the radius of the nozzle or a cross-sectional dimension of the throttle. In the Helmholtz mode the shearing is restricted to a rather thin layer along the wall. The shear stress exerted by the fluid on the plane x = 0 is given by: τ =η ∂vz = ηZ0 ωκ[− cos ωt + sin ωt]. ∂x (34) As long as the viscously affected layer is small in relation to the radius of either the nozzle or the throttle, the dissipated energy of a fluid contained in a hole with a radius R and length L which is forced to move harmonically with a mean amplitude X0 can be calculated from: Z Z Z ∂vz ds vz (x = 0) dt Pdiss = F ds = F dt = 2π RLη dt ∂x = 2π RLηκωZ02 ZωT (cos ωt − sin ωt) cos ωt dωt 0 = OLηκωZ02 ZωT (cos ωt − sin ωt) cos ωt dωt, 0 (35) HYDRO-ACOUSTICS OF PIEZOELECTRICALLY DRIVEN INK-JET PRINT HEADS 225 where O is the circumference of the hole considered. Per half period we find (ωT = π ): π Pdiss = OLηκωZ02 . (36) 2 Next, we substitute for Z0 the amplitudes of the motions in the nozzles, throttles and hose pillar. The viscous forces follow according to Poiseuille’s law [31]: F1 = 8π ηL1 v1 , F2 = 8π ηL2 v2 , F3 = 8π ηL3 v3 , F4 = 8π ηL1 w1 , F5 = 8π ηL2 w2 . (37) As the five modes are completely independent, we can calculate the viscous dissipation per mode. For the Poiseuille case per half period (1t = π/ωi ) we find for mode i: Pdiss,i = 4π 2 ηωi [k(L1 ξ1i2 + L2 ξ2i2 ) + L3 ξ3i2 + (n − k)(L1 ξ1i2 + L2 ξ2i2 )]Di2 . (38) For the time increment defined the dissipated energy just equals the decrease in amplitude of the kinetic energy. From that condition a linear first-order differential equation for the amplitude of the i-th mode is obtained: 4π η dDi = − Di ρ0 × k(L1 ξ1i2 + L2 ξ2i2 ) + L3 ξ3i2 + (n − k)(L1 ξ4i2 + L2 ξ5i2 ) dt k(A1 L1 ξ1i2 + A2 L2 ξ2i2 ) + A3 L3 ξ3i2 + (n − k)(A1 L1 ξ4i2 + A2 L2 ξ5i2 ) = −ζi dt, Di (t) = Di (t = 0) e−ζi t , i = low-frequency modes. (39) Likewise, for the high-frequency case we find for mode i: π Pdiss,i = ηκωi k(O1 L1 ξ1i2 + O2 L2 ξ2i2 ) 2 + O3 L3 ξ3i2 + (n − k)(O1 L1 ξ1i2 + O2 L2 ξ2i2 ) Di2 (40) and for the decrease in amplitude: dDi ηκ = − Di 2ρ0 × k(O1 L1 ξ1i2 + O2 L2 ξ2i2 ) + OL3 ξ3i2 + (n − k)(O1 L1 ξ4i2 + OL2 ξ5i2 ) dt k(A1 L1 ξ1i2 + A2 L2 ξ2i2 ) + A3 L3 ξ3i2 + (n − k)(A1 L1 ξ4i2 + A2 L2 ξ5i2 ) = −ζi dt, Di (t) = Di (t = 0) e−ζi t , i = high-frequency modes. (41) We have achieved expressions for the velocities and displacements as functions of time of the amounts of fluid in all the nozzles dependent on the number of pumps addressed. Apart from the acoustic properties of the separate pumps, also included 226 J.F. DIJKSMAN Figure 6. Pulse shape. are the effects of the acoustic properties of the main supply channel, damping and surface tension. On combining these results with the droplet formation model of Section 2 we are able to investigate the system behaviour of a print head. 5. Results and Discussion We will consider a typical pump according to the design described in patent application [35]. The dimensions of such a system with 24 pumps are: – volume of the pump chamber Vc = 0.36 mm3 , – nozzle radius R1 = 25 µm (cross-section A1 = 1963 µm2 ), nozzle length L1 = 50 µm, – throttle A2 = 3000 µm2 , circumference O2 = 194 µm and length L2 = 0.5 mm, – volume of the main supply channel Vm = 3 mm3 , – hose pillar A3 = 0.778 mm3 , circumference O3 = 3.14 mm and length L3 = 4 mm. The ink used has the following properties: – viscosity η = 0.0024 Pa.s, – surface tension σ = 0.05 N/m, – density ρ = 1000 kg/m3 . The magnitudes of the pressure waves generated in the pumps and the main supply channel system depend on the compressibility of the fluid and the flexibility of the wall [24]. To account for these two effects we do not use the isentropic value for the speed of sound in the fluid, but lower, different values in the pump chamber and the main supply channel. The adapted speed of sound in the main supply channel cm will be used as a design parameter. The speed of sound in the pump chambers equals cc = 1000 m/s. The pumps are activated by a pulse with the following characteristics. First the volume of the pump is enlarged. This is followed after a short time by a sudden volume contraction (see Figure 6). We will first consider what happens with the motion of the fluid in the nozzle after the volume has been enlarged. The results are summarised in Tables I–VII and in Figures 7–12. HYDRO-ACOUSTICS OF PIEZOELECTRICALLY DRIVEN INK-JET PRINT HEADS 227 Table I. Resonance frequencies.∗ Mode number Resonance frequency in Hz for cm = 100 m/s Resonance frequency in Hz for cm = 1200 m/s 1 2 3 4 5 3436 6281 7406 58907 58919 4868 6281 53993 58907 68456 ∗ These resonance frequencies do not depend on the number of activated pumps. Table II. Eigenvectors for cm = 100 m/s with one activated pump. Mode number ξ1i ξ2i ξ3i ξ4i ξ5i Relative magnitude 1 2 3 4 5 1 1 1 1 1 0.73 0.72 0.72 –0.09 –0.09 0.24 0 –0.03 0 0.00004 1 –0.04 1 –0.043 1 0.73 –0.03 0.72 0.004 –0.09 1 32.6 0.74 –3.58 –0.15 Table III. Eigenvectors for cm = 1200 m/s with one activated pump. Mode number ξ1i ξ2i ξ3i ξ4i ξ5i Relative magnitude 1 2 3 4 5 1 1 1 1 1 0.73 0.72 0.04 –0.09 –0.38 0.07 0 –0.02 0 0.036 1 –0.04 1 –0.043 1 0.73 –0.03 0.04 0.004 –0.38 1 17.1 –0.07 –0.82 –0.016 Note that the relative magnitudes of the eigenvectors for the displacements are given in the tables. These values must be multiplied by the appropriate resonance frequencies to obtain the relative magnitude per mode of the velocities. Using the results of the analysis we are able to categorise the five resonance phenomena. The first is a capillary mode in which all the masses, including the mass in the hose pillar, oscillate in a similar way against the surface tension springs in the 228 J.F. DIJKSMAN Table IV. Eigenvectors for cm = 100 m/s with 12 activated pumps. Mode number ξ1i ξ2i ξ3i ξ4i ξ5i Relative magnitude 1 2 3 4 5 1 1 1 1 1 0.73 0.72 0.72 –0.09 –0.09 0.24 0 –0.03 0 0.00004 1 –1 1 –1 1 0.73 –0.72 0.72 0.09 –0.09 1 1.42 0.74 –0.15 –0.15 Table V. Eigenvectors for cm = 1200 m/s with 12 activated pumps. Mode number ξ1i ξ2i ξ3i ξ4i ξ5i Relative magnitude 1 2 3 4 5 1 1 1 1 1 0.73 0.72 0.04 –0.09 –0.38 0.07 0 –0.02 0 0.036 1 –1 1 –1 1 0.73 –0.72 0.04 0.09 –0.38 1 0.75 –0.07 –0.08 –0.016 Table VI. Eigenvectors for cm = 100 m/s with 23 activated pumps. Mode number ξ1i ξ2i ξ3i ξ4i ξ5i Relative magnitude 1 2 3 4 5 1 1 1 1 1 0.73 0.72 0.72 –0.09 –0.09 0.24 0 –0.03 0 0.00004 1 –23 1 –23 1 0.73 –16.6 0.72 2.09 –0.09 1 0.06 0.74 –0.007 –0.15 nozzles. The second phenomenon is also a surface-tension-driven oscillation, only now the direction of the motion in the actuated pumps is opposite to the motion of the non-activated pumps. The third frequency is the Helmholtz frequency of the main supply channel with the hose pillar and all the pumps connected to it. The fourth frequency is the Helmholtz frequency of the pump chamber. The motion of the fluid in the activated pumps is opposite to that in the non-activated pumps. The HYDRO-ACOUSTICS OF PIEZOELECTRICALLY DRIVEN INK-JET PRINT HEADS 229 Table VII. Eigenvectors for cm = 1200 m/s with 23 activated pumps. Mode number ξ1i ξ2i ξ3i ξ4i ξ5i Relative magnitude 1 2 3 4 5 1 1 1 1 1 0.73 0.72 0.04 –0.09 –0.38 0.07 0 –0.02 0 0.036 1 –23 1 –23 1 0.73 –16.6 0.04 2.09 –0.38 1 0.03 –0.07 –0.003 –0.016 fifth frequency is also a Helmholtz frequency of the pump chamber, only now some of the stiffening of the motion of the fluid in the throttle due to the presence of the main supply channel is noticeable because of the somewhat higher frequency. Considering the relative strengths of the modes we see the following effects: – in the case of the low speed of sound (soft acoustic case) the relative magnitudes of the low-frequency modes shift considerably with increasing number of activated pumps. With one activated pump the low-frequency behaviour is determined mainly by the capillary mode in the pump considered. When almost all the pumps are activated the two modes involving the fluid in the hose pillar are dominant. – in the case of the high speed of sound (hard acoustic case) we see a gradual change from the dominance of the second and fourth modes, when one pump is activated to the dominance of first and third modes when almost all the pumps are activated at the same time. These effects are clearly displayed in Figures 7–12. These figures show the response of the fluid in the nozzle caused by the initial volume enlargement. The change in volume amounts to 0.01% of the pump chamber volume (1Vactuator = −10−4 Vc ). The rise time equals 20 µsec. When one pump is activated, the response of the motion of the fluid in the nozzle is almost independent of the properties of the main supply channel. When 12 pumps are activated, things are different. In the case of a so-called acoustically hard supply channel (high speed of sound) the response is, to a certain extent, similar to that in the case with the one activated pump. The high-frequency contribution, however, shows an interference of two or more vibrations of unequal magnitudes, but slightly different frequencies. In the case of the acoustically soft main supply channel we see a poorly damped interference of low-frequency vibrations. These effects are enhanced when more pumps are switched on at the same time. The droplet velocity and size are dependent on the pulse time tp . Varying the pulse time from 20 µsec up to about 100 µsec results in a difference in the position 230 J.F. DIJKSMAN Figure 7. Response of the fluid in the nozzle caused by the initial volume enlargement. Number of pumps: 24, number of activated pumps: 1, 1Vactuator = −10−4 Vc , rise time tp1 = 20 µsec, cm = 100 m/s. Figure 8. Response of the fluid in the nozzle caused by the initial volume enlargement. Number of pumps: 24, number of activated pumps: 1, 1Vactuator = −10−4 Vc , rise time tp1 = 20 µsec, cm = 1200 m/s. The curves are almost identical to those in Figure 7. HYDRO-ACOUSTICS OF PIEZOELECTRICALLY DRIVEN INK-JET PRINT HEADS 231 Figure 9. Response of the fluid in the nozzle caused by the initial volume enlargement. Number of pumps: 24, number of activated pumps: 12, 1Vactuator = −10−4 Vc , rise time tp1 = 20 µsec, cm = 100 m/s. Unlike in Figure 7, we now observe a poorly damped lower frequency mode. Figure 10. Response of the fluid in the nozzle caused by the initial volume enlargement. Number of pumps: 24, number of activated pumps: 12, 1Vactuator = −10−4 Vc , rise time tp1 = 20 µsec, cm = 1200 m/s. Note that the low-frequency motion has a lower frequency than in Figure 8. The high-frequency velocity shows a slight beat. 232 J.F. DIJKSMAN Figure 11. Response of the fluid in the nozzle caused by the initial volume enlargement. Number of pumps: 24, number of activated pumps: 23, 1Vactuator = −10−4 Vc , rise time tp1 = 20 µsec, cm = 100 m/s. Note that the poorly damped low-frequency mode is more pronounced than in Figures 7 and 8. Figure 12. Response of the fluid in the nozzle caused by the initial volume enlargement. Number of pumps: 24, number of activated pumps: 23, 1Vactuator = −10−4 Vc , rise time tp1 = 20 µsec, cm = 1200 m/s. Note that the low-frequency motion has a larger amplitude than in Figure 10. The high-frequency velocity curve shows a more pronounced beat. HYDRO-ACOUSTICS OF PIEZOELECTRICALLY DRIVEN INK-JET PRINT HEADS 233 Figure 13. Response in terms of fluid displacement and velocity in the nozzle for the pulse shape shown in Figure 6. Number of pumps: 24, number of activated pumps: 1, 1Vactuator = −10−4 Vc , rise time tp1 = 20 µsec, pulse time tp = 150 µsec, sudden contraction time tp2 = 2 µsec, cm = 100 m/s. of the meniscus of about 20 µm. With respect to Figure 3, this implies a threefold increase in droplet volume and about 1 m/s decrease in droplet speed. With a fixed pulse time the position of the meniscus at the moment of the sudden volume contraction is dependent on the number of pumps activated. In the case of the print head with the acoustically hard main supply channel, this difference may be as large as 6 µm. In terms of droplet volume and velocity this means a 15% change in volume and 10% velocity variation. This apart from the fact that the frequency of the mode that determines the high-velocity motion has been shifted from 58.9 to 54 KHz. A lower frequency does not influence the droplet velocity too much, but the droplet volume increases by about 5%. When the main supply channel is acoustically soft, the differences in the position of the meniscus dependent on the number of pumps activated are smaller than in the case of the acoustically hard supply channel. No change in the frequency of the high-frequency mode is observed. Figures 13–16 show the effect of the sudden contraction for a pulse time of 150 µsec. The maximum velocity in the nozzle is hardly influenced by either the acoustical hardness of the main supply channel or the number of pumps activated. The greatest differences are in the position of the meniscus and the shift in frequency of the high-frequency mode in the high speed of sound case. It should be mentioned that we have only considered damping in the nozzles, throttles and hose pillar. In reality, the damping, especially in the main supply 234 J.F. DIJKSMAN Figure 14. Response in terms of fluid displacement and velocity in the nozzle for the pulse shape shown in Figure 6. Number of pumps: 24, number of activated pumps: 1, 1Vactuator = −10−4 Vc , rise time tp1 = 20 µsec, pulse time tp = 150 µsec, sudden contraction time tp2 = 2 µsec, cm = 1200 m/s. Figure 15. Response in terms of fluid displacement and velocity in the nozzle for the pulse shape shown in Figure 6. Number of pumps: 24, number of activated pumps: 23, 1Vactuator = −10−4 Vc , rise time tp1 = 20 µsec, pulse time tp = 150 µsec, sudden contraction time tp2 = 2 µsec, cm = 100 m/s. HYDRO-ACOUSTICS OF PIEZOELECTRICALLY DRIVEN INK-JET PRINT HEADS 235 Figure 16. Response in terms of fluid displacement and velocity in the nozzle for the pulse shape shown in Figure 6. Number of pumps: 24, number of activated pumps 23, 1Vactuator = −10−4 Vc , rise time tp1 = 20 µsec, pulse time tp = 150 µsec, sudden contraction time tp2 = 2 µsec, cm = 1200 m/s. channel, is much better than calculated in this paper. It may safely be assumed that the damping of the low-frequency vibrations in particular will be considerably better than shown in Figures 7–16. 6. Conclusion In Section 1 we gave the two fundamental resonances of a single valveless pump: the Helmholtz frequency and the frequency of the capillary mode (slosh mode). When we consider a number of such pumps connected to a common main supply channel with its own acoustical properties we observe drastic changes. First of all, we observe more modes. We have analysed the influences of acoustically hard and soft supply channels. When only one pump is activated the differences are not that great, but when the number of activated pumps increases the pattern of the low-frequency motions changes. For the hard acoustic case also the high frequency behaviour alters. The velocity does not change much, but the position of the meniscus at the moment of the sudden contraction is dependent on the number of activated pumps. As shown in Section 2, the position of the meniscus strongly influences the droplet speed and size. 236 J.F. DIJKSMAN An acoustically hard supply channel introduces high-frequency disturbances. The frequency for droplet emission was found to shift to a lower value in the case considered. The low-frequency mode shifted also to a lower value. Low-frequency oscillations are generated in a head with an acoustically soft main supply channel. The amplitudes of these low-frequency oscillations increase with an increasing number of activated pumps. In the model proposed, a manifold of Helmholtz resonators, some of these modes are poorly damped. Hardly any shift is then observed for the droplet formation frequency. References 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. 11. 12. 13. 14. Le, H., Introduction to drop-on-demand ink jet printing. Tutorial Notes. In: Hanson, E. and Anderson, J. (eds), IS&T’s Eleventh International Congress on Advances in Non-Impact Printing Technologies. The Society for Imaging and Technology, Springfield, VA (1995) p. VIII. Nielsen, N.J., History of ThinkJet printhead development. Hewlett-Packard Journal 36(5), May (1985) 4–11. Allen, R.R., Meyer, J.D. and Knight, W.R., Thermodynamics and hydrodynamics of thermal ink jets. Hewlett-Packard Journal, May (1985) 21–27. Askeland, R.A., Childers, W.D. and Sperry, W.R., The second-generation thermal inkjet structure. Hewlett-Packard Journal, August (1988) 28–31. Buskirk, W.A., Hackleman, D.E., Hall, S.T., Kanarek, P.H., Low, R.N., Trueba, K.E. and Van de Poll, R.R., Development of a high-resolution thermal inkjet printhead. Hewlett-Packard Journal, October (1988) 55–61. O’Horo, M.P., Deshpande, N.V. and Drake, D.J., Drop generation processes in TIJ printheads. In: Hays, D. and Melnyk, A. (eds), IS&T’s Tenth International Congress on Advances in NonImpact Printing Technologies. The Society for Imaging and Technology, Springfield, VA (1994) pp. 418–421. Poon, C.C. and Lee, F.C., Study of the vapor bubble on an inkjet printhead heater surface. In: Hays, D. and Melnyk, A. (eds), IS&T’s Tenth International Congress on Advances in NonImpact Printing Technologies. The Society for Imaging and Technology, Springfield, VA (1994) pp. 422–426. Shimoda, J., New bubble jet head technologies used in Canon Color Bubble Jet Printer BJC70. In: Hays, D. and Melnyk, A. (eds), IS&T’s Tenth International Congress on Advances in Non-Impact Printing Technologies. The Society for Imaging and Technology, Springfield, VA (1994) pp. 353–356. Cornell, R., A theoretical and experimental examination of thermal ink jet nucleation criteria. In: Melnyk, A. and Hopper, M. (eds), IS&T’s NIP12: International Conference on Digital Printing Technologies. The Society for Imaging and Technology, Springfield, VA (1996) pp. 19–24. Stemme, E. and Larsson, S.G., The piezoelectric capillary injector. A new hydrodynamical method for dot pattern generation. IEEE Transactions on Electron Devices ED20 (1973) 13–19. Kurz, H., Tintenstrahldrucker. PHILIPS. Unsere Forschung in Deutschland, Band III. Philips GmbH Forschungslabor, Aachen (1980) pp. 194-196. Döring, M., Ink-jet printing. Philips Technical Review 40(7) (1982) 192–198. Rosenstock, G., Erzeugung schnell fliegender tropfen für Tintendrucker mit Hilfe von Druckwellen. PhD Thesis, University of München (1982). Lee, F.C., Mills, R.N. and Talke, F.E., The application of drop-on-demand ink jet technology to color printing. IBM Journal of Research and Development 28(3) (1984) 307–313. HYDRO-ACOUSTICS OF PIEZOELECTRICALLY DRIVEN INK-JET PRINT HEADS 15. 237 Bogy, D.B. and Talke, F.E., Experimental and theoretical study of wave propagation phenomena in drop-on-demand ink jet devices. IBM Journal of Research and Development 28(3) (1984) 314–321. 16. Bentin, H., Döring, M., Ratke, W. and Rothgordt, U., Physical properties of micro-planar inkdrop generators. Journal of Imaging Technology 12(3) (1986) 152–155. 17. Shield, T.W., Bogy, D.B. and Talke, F.E., Drop formation by DOD ink-jet nozzles: A comparison of experiment and numerical simulation. IBM Journal of Research and Development 31(1) (1986) 97–110. 18. Kitahara, T., Ink jet with multi-layer piezoelectric actuator. In: Hanson, E. and Anderson, J. (eds), IS&T’s Eleventh International Congress on Advances in Non-Impact Printing Technologies. The Society for Imaging and Technology, Springfield, VA (1995) pp. 346–349. 19. Burr, R.F., Tence, D.A. and Berger, S.S., Multiple dot size fluidics for phase change piezoelectric ink jets. In: Melnyk, A. and Hopper, M. (eds), IS&T’s NIP12: International Conference on Digital Printing Technologies. The Society for Imaging and Technology, Springfield, VA (1996) pp. 12–18. 20. Usui, M., Development of the new multilayer actuator head (MACH with multi-layer ceramic with hyper-integrated piezo segments). In: Melnyk, A. and Hopper, M. (eds), IS&T’s NIP12: International Conference on Digital Printing Technologies. The Society for Imaging and Technology, Springfield, VA (1996) pp. 50–53. 21. McDonald, M., Scaling of piezoelectric drop-on-demand jets for high resolution applications. In: Melnyk, A. and Hopper, M. (eds), IS&T’s NIP12: International Conference on Digital Printing Technologies. The Society for Imaging and Technology, Springfield, VA (1996) pp. 53–56. 22. Rayleigh, J.W.S., The Theory of Sound, Vol. 2. The MacMillan Company, London (1896), republished by Dover Publications, New York (1945). 23. Helmholtz, H., On the Sensations of Tone. Longman, Harlow (1885), republished by Dover Publications, New York (1954). 24. Dijksman, J.F., Hydrodynamics of small tubular pumps. Journal of Fluid Mechanics 139 (1984) 173–191. 25. Beasley, J.D., Model for fluid ejection and refill in an impulse drive jet. Photographic Science and Engineering 21(2) (1977) 78–82. 26. Eggers, J. and Dupont, T.F., Drop formation in a one-dimensional approximation of the Navier– Stokes equation. Journal of Fluid Mechanics 262 (1994) 205–221. 27. Eggers, J., Nonlinear dynamics and breakup of free-surface flows. Reviews of Modern Physics 69(3) (1997) 865–930. 28. Badie, R. and De Lange, D.F., Mechanism of drop constriction in a drop-on-demand inkjet system. Proceedings of the Royal Society of London (A) 452 (1997) 2573–2581. 29. Landau, L.D. and Lifshitz, E.M., Fluid Mechanics. Course of Theoretical Physics, Vol. 6. Pergamon Press, Oxford (1978) Chapter VII. 30. Thomson, J.T., Theory of Vibration with Applications. George Allen & Unwin, London (1981). 31. Bird, R.B., Armstrong, R.C. and Hassager, O., Dynamics of Polymeric Liquids, Vol. 1, second edition. John Wiley & Sons, New York (1987). 32. Kundu, P.K., Fluid Mechanics. Academic Press, San Diego, CA (1990) pp. 284–287. 33. Rosenhead, L., Laminar Boundary Layers. Clarendon Press, Oxford (1963) pp. 136–139. 34. Carslaw, H.S. and Jaeger, J.C., Conduction of Heat in Solids. Oxford University Press, Oxford (1959) pp. 64–68. 35. European Patent Application EP95933599.3-2304, 25 October 1995.