Journal of Process Control 13 (2003) 769–786
www.elsevier.com/locate/jprocont
A direct method for multi-loop PI/PID controller design
Hsiao-Ping Huang*, Jyh-Cheng Jeng, Chih-Hung Chiang, Wen Pan
Department of Chemical Engineering, National Taiwan University, Taipei 10617, Taiwan, Republic of China
Received 30 August 2002; received in revised form 7 January 2003; accepted 17 February 2003
Abstract
Difficulties caused by the interactions are always encountered in the design of multi-loop control systems for MIMO processes.
To overcome the difficulties, a multi-loop system is decomposed into a number of equivalent single loops for design. For each
equivalent single loop, an effective open-loop process (EOP) is formulated without prior knowledge of controller dynamics in other
loops, and, hence, controller can be designed directly and independently. Based on the derived EOPs, a model-based method aims
at having reasonable gain margins (e.g. 52) and phase margins (e.g. 60 ) are presented to derive multi-loop PI/PID controllers.
This proposed method is formulated in details for the EOPs of 2-loop systems. Extension to higher dimensional systems needs
further simplification and is illustrated with formulation for 3-loop systems. Simulation results show that this presented method is
effective for square MIMO processes, especially, for low dimensional ones.
# 2003 Elsevier Ltd. All rights reserved.
Keywords: Multi-loop; Dynamic interaction; PI/PID controller; Effective open-loop process; Low-dimensional system
1. Introduction
Multi-loop SISO controllers are often used to control
chemical plants which have MIMO dynamics. The simple controller structure and the easiness to handle loop
failure are the most attractive advantages of such systems. But, inevitably, interactions exist between loops,
design of such controllers to meet specifications would
then encounter more difficulties than that for a single
loop and becomes an open research topic for years. Many
design methods have been reported in literature. Among
them, five types of design can be classified, they are:
1.
2.
3.
4.
Detuning methods [1,2].
Sequential loop closing methods [3–6].
Iterative or trial-and-error methods [7,8].
Simultaneous equation solving or optimization
methods [9,10].
5. Independent methods [11–14].
In the detuning methods, each controller in the system
is designed based on the corresponding diagonal element
* Corresponding author. Tel.: +886-2-2363-8999; fax: +886-22362-3935.
E-mail address: huanghpc@ccms.ntu.edu.tw (H.-P. Huang).
0959-1524/03/$ - see front matter # 2003 Elsevier Ltd. All rights reserved.
doi:10.1016/S0959-1524(03)00009-X
and ignore the interactions from other loops. The controllers are then detuned to take into accounts the
interactions until some prescribed limit (e.g. the biggest
log-modulus) is attained. The BLT tuning methods for
PI [1] and PID controllers [2] are examples of these
methods. Similar methods to take into accounts the
interaction by detuning have also been addressed by
Chien et al. [15,16]. The simplicity of this method is its
major advantage. But, the disadvantage results from the
fact that loop performance and stability can not be
clearly defined through the detuning procedures.
In the sequential loop closing method, the loops are
closed one after the other. The closing sequence usually
starts with the fastest loop. The dynamic interaction of
this loop is then considered in the closing of next loop,
and so on. Examples of such methods are those of
Mayne [3], Chiu and Arkun [4], and Hovd and Skogestad [5]. Some disadvantages on these aspects have been
addressed [9,13], which include: the final controller
design may depend on the order by which the controllers are designed, and iteration procedures are
essential because closing the subsequent loops may alter
the response of the previously designed loops. Hence,
conservative design may result due to the RHP zero on
the diagonal which may not be the RHP transmission
zeros of the MIMO process.
770
H.-P. Huang et al. / Journal of Process Control 13 (2003) 769–786
For the iterative design methods, controllers in each
loop are tuned one after the other like sequential loop
closing in the first run. After all loops have been closed,
the controller will then be re-tuned one after the other with
all other loops being closed with the controllers obtained in
the previous step. This procedure will go on until they
converge. The work of Shen and Yu [7] is one of the
examples. In the trial-and-error method (e.g. ICC method
of Lee et al. [8]), the PID parameters are determined
sequentially by driving the system to have continuous
cycling. Additional constraints are imposed to compute
the controller settings so as to guarantee their nominal
stability. These type of design is usually associated with
relay feedback tests (usually called as auto-tuning variations, ATV). Some other related works have also been
reported [17–22]. The main disadvantages are not only due
to the need for successive experiments but also due to the
weak tie between the tuning procedure and the loop performance. In literature, the ICC method has been illustrated for the design of multi-loop PI controllers only.
Design of multi-loop controller by way of simultaneous equation solving is numerically difficult. Lately,
Wang et al. [9] presented a design method for multi-loop
PI/PID controllers. They used a modified ZieglerNichols method to set up equations to solve for the
parameters of the controller that will give specified gain
margins. Although a novel approach has been presented
to take accounts of the loop interactions, there is no
guarantee for the existence of solutions. Because of the
computations are nonlinear and complicated, the
method has been illustrated with some two-input-twooutput (TITO) systems. Extension for higher dimensions seems to be difficult and has not been reported yet.
Another work of Bao et al. [10] formulated the multiloop design as a nonlinear optimization problem with
matrix inequality constraints. As has been illustrated,
the formulation does not include the systems that have
different input delays, which happens to be very common in MIMO process control. Simultaneous optimization for solving multi-loop controllers is also
numerically difficult. The result is very much dependent
on the conditions defined in the objective function. The
controllers may result in unstability, in case of loop
failure or where loops are closed in different orders.
Independent design procedures have been used by
Economou and Morari [11], Skogestad and Morari [13],
Hovd and Skogestad [14]. SISO controllers are designed
independently by using the defined bounds to guarantee
stability and performance. But, the detailed information
about the controller dynamics in other loops is not used,
the resulting performance may be poor [5]. Lately,
Zhang et al. [23] used the passivity-based conditions to
formulate an optimization procedure for synthesizing
decentralized multi-loop controllers.
All those literature mentioned earlier, in fact, tried
with different efforts to overcome a common difficulty
encountered, that is: the controllers interact each other.
As a result, the performance of one loop cannot be evaluated without knowing the controllers in other loops.
One possible way to overcome this difficulty and to make
use of SISO design methods is to construct equivalent
individual loops e.g. Huang et al. [24], Wang et al. [9]).
But, obviously, in these equivalent loops, the knowledge
of controller dynamics in other loops is required.
In this paper, design of multi-loop controllers is
decomposed into tasks of design for controllers in a
number of equivalent and independent single loops. The
difficulty due to the interactions between loops is overcome by a proper formulation for the dynamics of each
open-loop transmission from ui to yi. The transfer
function that describes this effective transmission in
each equivalent loop is considered as the effective openloop process (designated as EOP) of that loop. With
these formulated EOPs, design of controllers can be
carried out directly and independently without referring
to the controller dynamics of other loops. A modelbased method for synthesis of PI/PID controller is then
presented. The tuning formulas for PI/PID parameters
are formulated in terms of simple parametric models,
or, in terms of the ultimate gain and ultimate frequency
of these equivalent loops. The proposed method is first
formulated for 2-loop systems in detail, and then extended with further simplification to systems of three or
more loops. By making use of this proposed method,
quite a few simulation tests have been tried on several
example processes. The results show that this method is
simple and effective for designing multi-loop PID controllers, especially for MIMO process that have low
dimensions. For high dimensional processes, due to the
inevitable modeling errors encountered in formulation,
the design has to be more conservative.
2. Equivalent loops for 2-loop systems
Consider a 22 system of the following:
YðsÞ ¼ GðsÞUðsÞ þ DðsÞ
ð1Þ
where Y(s), U(s) and D(s) designate the output, input,
and disturbance vectors, respectively. G(s) is a openloop transfer function matrix (abbrv. TFM) that represents the dynamics of the plant, and is given as:
g1;1 ðsÞ g1;2 ðsÞ
GðsÞ ¼
ð2Þ
g2;1 ðsÞ g2;2 ðsÞ
As shown in Fig. 1, when the second loop is closed,
the input from u1 to y1 has two transmission paths. The
combination of the transfer functions through these two
paths is considered as the effective open-loop dynamics
of the first equivalent loop and is designated as g1(s).
Similarly, g2(s) for u2 to y2 can be written. With these
two EOPs, controller design for the 2-loop system is
H.-P. Huang et al. / Journal of Process Control 13 (2003) 769–786
771
Fig. 1. Equivalent open-loop block in a 22 multi-loop system.
considered to be decomposed into two single loop systems as shown in Fig. 2.
With the definitions given earlier, the EOPs of the a
2-loop system are given as:
By the definition of dynamic relative gain of the
following:
lð s Þ ¼
g1 ¼ g1;1 g1;2 g1
2;2 g2;1 h2
g2 ¼ g2;2 g2;1 g1
1;1 g1;2 h1
g1;1 ðsÞg2;2 ðsÞ
g1;1 ðsÞg2;2 ðsÞ g1;2 ðsÞg2;1 ðsÞ
ð5Þ
ð3Þ
or simply:
where
gc;i gi;i
hi ¼
;
1 þ gc;i gi;i
i ¼ 1; 2
and gc,i is the controller of ith loop.
ð4Þ
l¼
g1;1 g2;2
g1;1 g2;2 g1;2 g2;1
Eq. (3) can be re-written as:
Fig. 2. Equivalent loops for multi-loop controller design.
ð6Þ
772
H.-P. Huang et al. / Journal of Process Control 13 (2003) 769–786
1 g1;2 g2;1
g1 ¼ g1;1 þ
ð 1 h2 Þ
l g1;1 g2;2
1 g1;2 g2;1
g2 ¼ g2;2 þ
ð 1 h1 Þ
l g1;1 g2;2
ð7Þ
we may also re-write Eq. (7) as:
gi ¼ gi;i Fi ;
i ¼ 1; 2
ð8Þ
where i, which pre-multiplies gi,i in Eq. (7), interprets
how interactions in MIMO process and controller
dynamics take part in the loop interactions. In other
words, it can be identified as the interactions from the
other loop to the change in ui. Two extreme cases can be
derived from Eq. (7). First, when hi=0 (i.e. the other
loop being opened), gi becomes gi,i. This result is
obvious. On the other hand, when hi=1 (i.e. the other
loop being perfect), we shall have:
gi;i
gi ¼
:
ð9Þ
½l
This earlier result has also been addressed in literature
[15]. But, both cases previously mentioned are not practical in real practice of multi-loop control. Besides the
two extreme cases, the controller dynamics of each other
loop is thus included and is required in formulating gi,
which is also impractical in design, too. To circumvent
this awkwardness, the EOP in Eq. (7) is re-written by
giving a simplifying form, as an approximation, to
represent h1 and h2 in a practically designed multi-loop
system.
Notice that, in general, the product of gc(s)gp(s) in a
single loop, having integration mode in gc(s), can be
written in the following form:
g‘p ðsÞ ¼ gc ðsÞgp ðsÞ ¼ ðsÞ
es
s
ð10Þ
so that each h(s) of the loop can be written as:
es
ð s Þ
s
hðsÞ ¼
es
1 þ ð s Þ
s
ð11Þ
In a late paper of Huang and Jeng [25], when designed
to have optimal IAE performance, the function h(s) has
(s) of the following:
ð s Þ ¼
ko ð1 þ asÞ 0:76ð1 þ 0:47sÞ
¼
s
s
ð12Þ
Smaller values of ko and a other than those given in
Eq. (12) will result in more robust system with slightly
degraded from the optimal performance. Since, generally, it is common that the controllers in a multi-loop
system are more conservative than they stand alone as
single loops, ko and a should be smaller than those for
single loops. It was found that for proper dynamic
compensation, a value of 0.4 taken for a is most appropriate. Thus, by making use of the earlier functional
forms for h(s) and (s), a simplified form for h(s) to be
used in formulating the EOPs is given as:
ko ð1 þ 0:4i sÞei s
i s
ð13Þ
hi ðsÞ ko ð1 þ 0:4i sÞei;s
1þ
i s
If we take the earlier hi ðsÞ as benchmark and incorporate into Eq. (3) or Eq. (7), the dynamics of each EOP
will be temporally independent of others. The deviation
of actual hi (s) from this benchmark will then be treated
as modeling error of the EOP.
Thus, by substituting hi of Eq. (13) into Eq. (7), an
approximation of gi, designated as gi , becomes:
1 g1;2 g2;1 g1 ¼ g1;1 þ
1 h2
l g1;1 g2;2
1 g1;2 g2;1 1 h1
ð14Þ
g2 ¼ g2;2 þ
l g1;1 g2;2
As mentioned, the deviation of the each actual hi from
this benchmark is considered as the modeling error:
1 Dg1 ¼ g1;1 1 h2 h2
l
1 Dg2 ¼ g2;2 1 h1 h1
ð15Þ
l
or, in terms of multiplicative modeling error:
1 1
h2 h2
Dg
l
g1 ¼ 1 ¼
1
g1
1 1 h2
l
1
1
h1 h1
Dg
l
g2 ¼ 2 ¼
1 g2
1 1 h1
l
ð16Þ
3. PI/PID controller design
As has been presented earlier, the controller design is
treated as design for two independent loops. Each loop
consists of gc,i and gi as components. In the following,
we shall focus on those cases where G(s) is open-loop
stable. The PID controllers used are considered to have
the following forms:
1
þ D s
kc 1 þ
R s
gc ðsÞ ¼
ð17Þ
f s þ 1
or
773
H.-P. Huang et al. / Journal of Process Control 13 (2003) 769–786
g0c ðsÞ
k0c 1 þ R0 s 1 þ D0 s
¼
R0 s 1 þ f s
ð18Þ
The EOPs in Eq. (14), in general, is represented by
either the FOPDT or the SOPDT models of the following:
1
gc;i ðsÞ ¼ gi ðsÞ g‘p;i ðsÞ:
FOPDT dynamics:
kp es
g ¼
s þ 1
Regarding the stability robustness of each equivalent
loop, each loop has a gain margin (GM) and a phase
margin (PM) of the following:
kp ð3 s þ 1Þes
ð1 s þ 1Þð2 s þ 1Þ
ð20Þ
SOPDT dynamics (underdamped):
g ¼
ð25Þ
ð19Þ
SOPDT dynamics (overdamped):
g ¼
Notice that in the earlier loop transfer functions, ko,i
is the only free parameter in each loop. It can be
assigned to weight the importance of each loop. For
equal weight consideration, the value is defaulted to be
taken as 0.6. According to the g‘p;i chosen, PI or PID
controllers are given as:
kp ð3 s þ 1Þes
2 s2 þ 2s þ 1
ð21Þ
To determine which model is to be used for design,
the following optimization problem is conducted for
each EOP. That is:
1. Equivalent loop with loop transfer function of Eq.
(23)
GM ¼
2ko;i
PM ¼ ko;i
ð26Þ
2
2. Equivalent loop with loop transfer function of Eq.
(24)
GM ð !f
ArgfPg ¼ min
P
0
n
o
Reðg ð!;PÞ g ð!;PÞÞ
2þ
Imðg ð!;PÞg ð!;PÞÞ
2 d!
PM ¼
1:71
Ko;i
0
1
ko;i 0:4ko B
C
qffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi þ tan1 @qffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiA ð27Þ
2
2
2
2
2
10:16k 10:16k o;i
o;i
ð22Þ
where P consists of parameters in g and of is the frequency bandwidth concerned. The model that has best
fit to the frequency response of g* is the one to be considered.
The PID controller assigned for a given loop depends
on the model of EOP thus obtained. For those that can
be represented by FOPDT dynamics, both PI and PID
controllers can be selected to compensate for the loop
transfer functions to become the following standard
forms, that is:
o
h ðj!Þ
4
i
!u
1. When PI controller is used,
g‘p;i ¼
gc;i gi
ko;i ei s
¼
i s
ð23Þ
ko;i ð1 þ 0:4i sÞei s
:
i
s
1
¼min
max g ðj!Þ
!
i
!
(
1
g ðj!Þ
i
)
ð28Þ
where
2. When PID controller is used,
g‘p;i ¼ gc;i gi ðsÞ ¼
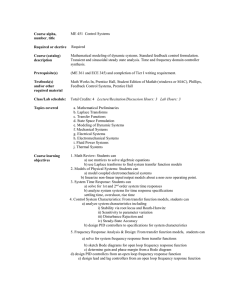
Based on the earlier equations, Fig. 3 shows the gain
margin and phase margin of the system when different
values of ko are used. For ko equals 0.6, each equivalent
loop has gain margin greater than 2.5, and phase margin greater than 55 . This indicates that each equivalent
loop has reasonable stability robustness. Meanwhile,
the assigned value of ko should subject to the stability of
the system, too. For robust stability due to the error
caused by simplification made in formulation, ko,i of
each equivalent loop should also meet the following
inequality:
hoi ¼
ð24Þ
For those that have SOPDT dynamics, the PID controller will be selected to result in a compensated loop
transfer function of Eq. (23).
gc;i gi
1 þ gc;i gi
ð29Þ
and ou is designated for ultimate frequency.
As for performance, each equivalent loop with the
default value will have no more than 15% overshoot.
One of the specification commonly used is the maximum closed-loop log modulus (Lc,max), that is:
774
H.-P. Huang et al. / Journal of Process Control 13 (2003) 769–786
Fig. 3. Gain and phase margins of system with loop transfer function of Eqs. (23) or (24).
Lc;max ¼max
20log
hoi ðj!Þ
!
ð30Þ
PI controller
k0c ¼
the value of ko,i in each loop can be selected to give a
specific (Lc,max), provided it lies in the feasible region for
robust stability.
3.1. Controller tuning
1. Tuning formula for EOP of FOPDT dynamics
The controller used for processes of the FOPDT
dynamics is given in a series form of Eq. (18), that
is:
1
1 þ D0 s
0
gc ðsÞ ¼ kc 1 þ 0
ð31Þ
R s 1 þ f s
The resulting controller parameters are given as follows.
k0c ¼
where, the subscript ZN designates that corresponding PID parameters are obtained from the conventional
Ziegler–Nichols setting, and,
F2 ¼
ko
ð0:5 for ko ¼ 0:6Þ
1:2
qffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi3
2
kp ku 1
tan
6
7
7
F3 ¼ 1:66
41 5
ð32Þ
ð35Þ
qffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
2
kp ku 1
2
D0 ¼ 0:4
0:05D0
ð33Þ
In contrast to the Z-N method which uses ultimate
gain (ku) and ultimate frequency (ou), the following
equations are derived for tuning rules compatible to
those from the previous model-based method:
k0c ¼ k0c ZN F1
R0 ¼ R0 ZN F2
D0 ¼ D0 ZN F3
ð34Þ
ko kp R0 ¼ f ¼
R0 ¼ F1 ¼
PID controller
ko kp 1
ð36Þ
H.-P. Huang et al. / Journal of Process Control 13 (2003) 769–786
The filter time constant, tf, can be taken arbitrarily
small (e.g. 0.05D0 ).
2. Tuning formula for EOP of SOPDT dynamics
When gi has obvious underdamped dynamics, PID
controllers are givenmmin a parallel form of Eq. (17),
that is:
1
1
gc ðsÞ ¼ kc 1 þ
þ D s
ð37Þ
R s
f s þ 1
2
61
Go ¼ 6
4 g2;1 ð0Þ
g1;1 ð0Þ
or
2
61
Go ¼ 6
4 g2;1 ð0Þ
g2;2 ð0Þ
3
g1;2 ð0Þ
g2;2 ð0Þ 7
7
5
1
3
g1;2 ð0Þ
g1;1 ð0Þ 7
7
5
1
775
ð39Þ
ð40Þ
and the resulting controller parameters are given as:
kc ¼
2ko
kp R ¼ 2
D ¼
2
f ¼ maxf0:05D ; 3 g
ð38Þ
Remarks: Processes of SOPDT dynamics that have a
damping ratio higher than 0.7 have very similar behavior to that of first order. Hence, PID controllers
derived for FOPDT dynamics can be applied to those
processes. Similarly, for those EOPs that has SOPDT
dynamics like Eq. (20), formulas in Eq. (34) can also be
applied.
3.2. Integrity with integral control and stability
As a part of complete design procedures, the integrity
with integral control has to be investigated in the very
beginning stage of design. In the previous formulation,
we have skipped this issue by assuming that G(s) is feasible for integral control (i.e. G(s) has integrity with
integral control). To have integrity with integral control, Campo and Morari [26] addressed that, for a given
G(s), it is necessary that either of the following condition holds true:
1. G(0)D is positive definite, where
(
)
g1;1 ð0Þ g2;2 ð0Þ
D ¼ Diag ;
;
g1;1 ð0Þ
g2;2 ð0Þ
2. There exists a diagonal matrix X such that G(0)X
is positive definite;
3. Spectra of all principal sub-matrices of G(0) exist
and are positive.
After having G(s) that has integrity with integral control, the PI/PID controllers can then be considered for
multi-loop control. The remaining issue from the proposed design method becomes how these independently
designed controllers can guarantee the stability of the
multi-loop system. To question, sufficient conditions for
these controllers are given in Theorem 1
Theorem 1. A 2-loop system resulted from the earlier
direct design procedure will be stable, if the controllers
meet the following conditions.
1. gc,1 stabilizes g1,1 and gc,2 stabilizes g2, or
2. gc,2 stabilizes g2,2 and gc,1 stabilizes g1,
1. gc,i satisfies
gc;i gi;i j!p;i < 1;
i ¼ 1; 2
ð41Þ
where op,i is the phase crossover frequency of gc,igi,I(s).
2. hoi satisfies
(
)
o
min
1
h ðj!Þ
4
i
!
g ðj!Þ
; 8! 2 ½0; 1Þ;
i
ð42Þ
i ¼ 1; 2
Proof. According to Schur’s formula, the characteristic
equation of a 2-loop system is:
det I þ Gc ðsÞGðsÞ ¼
1 þ gc;1 g1;1 1 þ gc;2 g2;2 g2;1 g1;2 g1
1;1 h1
¼ 1 þ gc;1 g1;1 1 þ gc;2 g2 ¼ 0
ð43Þ
Similarly, we have:
It is then clear that, for a 2-loop system, paring inputoutput variables to give a G(s) which has a positive
definite matrix Go of the following form will fulfill the
earlier necessary conditions:
det I þ Gc ðsÞGðsÞ ¼ 1 þ gc;2 g2;2 1 þ gc;1 g1 ¼ 0
ð44Þ
As a result, the stability of the system will be assured
if:
776
H.-P. Huang et al. / Journal of Process Control 13 (2003) 769–786
1. gc,1 stabilizes g1,1 and gc,2 stabilizes g2, or
2. gc,2 stabilizes g2,2 and gc,1 stabilizes g1,
From applying the Bode’ stability criterion, Eq. (41) is
required to stabilize g1,1 with gc,1 and to stabilize g2,2
with gc,2.
As has been mentioned, gc,i is designed to stabilize gi ,
and
gi ¼ gi 1 þ gi ; i ¼ 1; 2
ð45Þ
Thus, to stabilize gi with gc,i, i=1, 2, Eq. (42) is a
direct result from using the small gain theorem. Q.E.D.
Notice that, with the result in Theorem 1, the stability
issue regarding gc,i can be solved independently without
referring to the controllers in the other loop.
3.3. Illustrative examples
We shall illustrate the proposed design method for
multi-loop controllers. Consider first the Wood and
Berry (WB) process [27]. The transfer function matrices
of this process are given as follows:
2
3
12:8es 18:9e3s
6 16:7s þ 1
21s þ 1 7
7;
G p ð sÞ ¼ 6
4 6:6e7s
19:4e3s 5
10:9s þ 1 14:4s þ 1
2
3
3:8e8s
6 14:9s þ 1 7
7
GL ðsÞ ¼ 6
4 4:9e3s 5
13:2s þ 1
ð46Þ
First, the integrity of G(s) is examined. The matrix Go
of Eq. (39) in this case will be:
1
0:9742
o
G ¼
ð47Þ
0:5156 1
it is then obvious that Go is positive definite and PI or
PID controller can be considered for the 2-loop system.
With this basis, the EOPs can be found using Eq. (14).
The Bode’ diagrams of g1 and g2 are thus prepared as
shown in Fig. 4.
In Fig. 5(a), Bode’ diagrams of hi ðsÞ are also given.
Of each hi ðsÞ, open-loop gc,igi,i is modified from its
Fig. 4. Bode’ diagrams of EOPs (gi ) and their models for WB process.
H.-P. Huang et al. / Journal of Process Control 13 (2003) 769–786
Fig. 5. (a) Bode’ diagrams of modified hi ðsÞ for WB process (b) Bode’ diagrams of gi (s) with modified hi ðsÞ for WB process.
777
778
H.-P. Huang et al. / Journal of Process Control 13 (2003) 769–786
benchmark form to append a low-pass filter to simulate
possible reduction of bandwidth. In multi-loop design,
this reduction of bandwidth may be required due to the
interactions from other loops. The Bode’ diagrams of
corresponding EOPs to the different tf are given in
Fig. 5(b). Notice that, for a wide range of change in the
value of tf, the phase crossover frequencies as well as
their corresponding ultimate gains do not change significantly. Because of this fact, gi can be used directly to
design the controller in each equivalent loop without
going through an iteration procedure.
From the Bode’ diagrams of gi , the ultimate frequencies and the ultimate gains are thus computed. The
results are:
!u;1 ¼ 1:641;
ku;1 ¼ 1:922;
!u;2 ¼ 0:501;
ku;2 ¼ 0:265:
It seems feasible that these EOPs be modeled with
FOPDT models, since the slopes of these Bode’ diagram
are 20 db/decade around the phase crossover frequencies, and there are no significant resonance peak
gains. Thus, based on these Bode’ diagrams, parametric
models of the following are found:
Loop 1 :
Loop 2 :
6:563es
5:98s þ 1
9:462e3s
g2 5:09s þ 1
g1 The frequency responses of g1 and g2 are also shown
in Fig. 4 for comparison.
Then, by making use of these parametric models, the
controller parameters (designated as proposed 1) are
calculated and shown in Table 1. In Table 1, the controller settings (designated as proposed 2) based on ultimate gains and frequencies of gi obtained from their
Bode’ diagrams together with BLT [1], BLT-4 [2], Loh
et al. [18] settings are also given. Notice that 0.6 has
been taken as the value of ko for both equivalent loops.
In fact, the value of ko for each loop can be adjusted
independently without changing the design in the other
loop.
The complementary sensitivity functions of the
equivalent loops are thus computed:
Table 1
Models of EOPs and controller settings for 22 systems
Loop 1
Loop 2
Process
Model of EOP
Tuning method
Proposed 1
Proposed 2
BLT
BLT-4
Loh et al. [18]
Wood and Berry (WB)
Process
Model of EOP
Tuning method
Proposed 1
Proposed 2
BLT
Loh et al. [18]
Vinante and Luyben (VL)
Process
Model of EOP
Tuning method
Proposed 1
BLT
Loh et al. [18]
Wardle and Wood (WW)
Process
Model of EOP
Tuning method
Proposed 1
Proposed 1
BLT
Loh et al. [18]
6:563e1:0s
5:98sþ1
k0c1
0.547
0.694
0.375
0.191
0.868
1:290e1:0s
4:71sþ1
k0c1
2.191
1.588
1.070
1.353
0:051ð81:91sþ1Þe6:224s
1763:42s2 þ67:87sþ1
kc1
128.04
27.40
48.10
0
R1
5.98
7.44
8.29
16.32
3.25
0
R1
4.71
3.39
7.10
3.00
R1
67.87
41.40
18.99
0
D1
0.40
0.40
f1
0.02
0.02
0.41
0.02
0
D1
0.40
0.38
f1
0.02
0.02
D1
25.98
9:462e3:0s
5:09sþ1
k0c2
0.107
0.074
0.075
0.161
0.087
2:543e0:35s
6:25sþ1
f1
81.91
k0c2
4.213
3.436
1.970
3.360
0
R2
5.09
4.68
23.60
10.86
10.40
0
D2
1.20
1.59
0.89
0.045
0
R2
6.25
5.26
2.58
1.33
0
D2
0.14
0.14
f2
0.007
0.007
D2
21.0
f2
101.36
0
D2
0.16
0.213
f2
0.008
0.011
0:047ð101:36sþ1Þe8:153s
1261:05s2 þ60:05sþ1
kc2
R2
93.62
13.30
25.40
60.05
52.90
26.30
f2
0.06
0.08
Ogunnaike and Ray (OR 22)
32:205e0:2s
3:82sþ1
k0c1
0.356
0.702
0.210
0.620
0
R1
3.82
6.47
2.26
0.60
0
D1
0.08
0.0685
f1
0.004
0.003
8:348e0:4s
1:39sþ1
k0c2
0.250
0.224
0.175
0.247
0
R2
1.39
1.63
4.25
1.78
H.-P. Huang et al. / Journal of Process Control 13 (2003) 769–786
Fig. 6. Feasibility for equivalent loops of WB process.
Fig. 7. Responses and IAE values (in parentheses) of multi-loop control for WB process.
779
780
H.-P. Huang et al. / Journal of Process Control 13 (2003) 769–786
o
h1 ðj!Þ ¼
o
h2 ðj!Þ ¼
gc;1 g1
1 þ gc;1 g1
gc;2 g2
1þ
Table 3
Process open-loop transfer functions of 22 systems
ðj!Þ
Process
gc;2 g2 ðj!Þ
With the given controller parameters, it is found that
the value of maximum peak gains of
these
two loops
are well beneath the inverse of the gi as shown in
Fig. 6. The control responses of this 2-loop system are
given in Fig. 7. In Table 2, the predicted ultimate
gains, ultimate frequencies, and steady-state gains of
the two loops are compared with those from the final
design. They are in good match. Besides, the IAE
values of each loop subjected to set-point change are
also given in Fig. 7 to compare with those resulting
from other settings.
Similar method for synthesizing multi-loop PID
controller has been illustrated with more 2-loop systems (i.e. Vinante and Luyben [28], Wardle and
Wood [1], Ogunnaike and Ray [29]) whose transfer
function matrices are as given in Table 3. The
resulting parametric models and controller settings
are given in Table 1. Notice that the second tuning
formula (i.e. proposed 2) applies only to processes
whose EOPs can be represented by FOPDT model.
The responses and IAE values of control are given in
Figs. 8, 9 and 10.
g1,1(s)
g1,2(s)
s
0:3s
g2,1(s)
1:8s
g2,2(s)
Vinante and Luyben (VL)
2:2e
7sþ1
1:3e
7sþ1
2:8e
9:5sþ1
4:3e0:35s
9:2sþ1
Wardle and Wood (WW)
0:126e6s
60sþ1
0:101e12s
ð48sþ1Þð45sþ1Þ
0:094e8s
38sþ1
0:12e8s
35sþ1
Ogunnaike and Ray (OR 22)
22:89e0:2s
4:572sþ1
11:64e0:4s
1:807sþ1
4:689e0:2s
2:174sþ1
5:8e0:4s
1:801sþ1
4. Extension to systems with more loops
The earlier method for multi-loop PI/PID controllers
can be extend to systems that have three or more loops.
The formulation of EOPs is illustrated in detail with a
3-loop system and is extend to higher dimensional system using an assumption to simplify interactive transmissions among the loops.
4.1. Formulation of EOPs
An extension of EOPs from Eq. (3) to 3-loop system
will be derived for the first equivalent loop (i.e. g1). All
other EOPs can thus be derived in the same way.
Let G(s) and Gc(s) be partitioned into 22 forms, that is:
g1;1 G1;2
gc;1 0
GðsÞ ¼
; Gc ðsÞ ¼
ð48Þ
0
Gc;2
G2;1 G2;2
Table 2
Comparisons of the predicted and actual values of ku, ou and steady-state gain, k
Process
Loop 1
Loop 2
Loop 3
ku;1
!u;1
k1
ku;2
!u;2
k2
Wood and Berry
a
b1
b2
c
1.922
1.963
1.988
2.099
1.641
1.633
1.636
1.608
6.370
6.370
6.370
12.8
0.265
0.261
0.257
0.422
0.501
0.482
0.492
0.564
9.655
9.655
9.655
19.4
Vinante and Luyben
a
b1
b2
c
4.640
4.659
4.572
5.291
1.830
1.855
1.819
1.657
1.354
1.354
1.354
2.2
9.291
9.196
9.379
9.751
4.676
4.676
4.655
4.556
2.646
2.646
2.646
4.3
Wardle and Wood
a
b1
c
132.67
132.37
129.77
0.271
0.274
0.272
0.047
0.047
0.126
60.03
63.31
62.69
0.207
0.208
0.213
0.045
0.045
0.12
Ogunnaike and Ray (22)
a
b1
b2
c
1.859
1.844
1.905
1.597
9.318
8.683
8.736
7.991
32.30
32.30
32.30
22.89
0.673
0.844
0.642
1.331
3.320
3.295
3.361
4.252
8.184
8.184
8.184
5.8
Ogunnaike and Ray (33)
a
b1
c
4.893
9.021
7.132
0.547
0.707
0.687
0.329
0.329
0.66
0.925
1.200
1.394
0.547
0.551
0.627
1.294
1.294
2.36
ku;3
!u;3
k3
12.012
12.448
12.459
1.671
1.692
1.701
0.594
0.594
0.87
a, predicted value with EOP, gi . b1, actual value computed from proposed 1 tuning. b2, actual value computed from proposed 2 tuning. c, predicted
value with diagonal term, gi,i.
H.-P. Huang et al. / Journal of Process Control 13 (2003) 769–786
Fig. 8. Responses and IAE values (in parentheses) of multi-loop control for VL process.
Fig. 9. Responses and IAE values (in parentheses) of multi-loop control for WW process.
781
782
H.-P. Huang et al. / Journal of Process Control 13 (2003) 769–786
Fig. 10. Responses and IAE values (in parentheses) of multi-loop control for OR(22) process.
then,
n
1 o
1
g1 ¼ g1;1 G1;2 G2;2
I I þ G2;2 Gc;2
G2;1
1
1
1
¼ g1;1 G1;2 G2;2
G2;1 þ G1;2 G2;2
I þ G2;2 Gc;2 G2;1 : ð49Þ
By quite extensive algebraic manipulations, the earlier
EOP can be written as the following:
1
1
g1 ¼ g1;1 G1;2 G2;2
G2;1 þ G1;2 G2;2
Z
1
Z ¼ I þ G2;2 Gc;2 G2;1
g2;1 ð1 h2 Þ
1 6
6
¼
1 4
g3;1 ð1 h3 Þ
3
g2;3 g3;1
1 h3
g2;1 g3;3 7
7
g2;1 g3;2 5
1 h2
g2;2 g3;1
Z0
2. When frequency is high, h2 and h3 decay very fast
to zero. So,
g2;1 ð1 h2 Þ
Z
ð53Þ
g3;1 ð1 h3 Þ
ð50Þ
where
2
1. When frequency is small, both 1-h2 and 1-h
approach to zero. Thus,
ð51Þ
Since the earlier expression gives almost a zero vector
at low frequency, it is reasonable to adopt it as an
approximating expression for Z both at low and high
frequency ranges. Eq. (53) is the key simplification that
is made to takes into accounts the interactive transmission through other loops.
Consequently, the EOP for g1 can be written in a
simpler form as:
1
g1 ¼ g1;1 G1;2 G2;2
G2;1
1
þ G1;2 G2;2
G2;1 ðCsf1g HÞ
and,
¼
g2;3 g3;2
h2 h3 :
g2;2 g3;3
ð52Þ
The expression of g1 looks tedious and needs further
simplification to make it useful. If Z is examined in frequency domain, the following will hold true:
ð54Þ
and
1
G2;1
g1 ¼ g1;1 G1;2 G2;2
1
þ G1;2 G2;2
G2;1 ðCsf1g H Þ
ð55Þ
783
H.-P. Huang et al. / Journal of Process Control 13 (2003) 769–786
The matrix product designated by in the above
equation is known as the Hadamard product [30], which
means element to element product of two matrices.
Therefore, the vector H* consists of all the hi ðsÞ, except
h1 ðsÞ, in an order corresponding to the permuted G(s).
Meanwhile, Cs{1}=[1, 1,. . ., 1]T. Similarly, other EOPs
for i=2, 3 can be derived in the same way after permuting the matrix to move gi,i to the (1,1) entry and
defining the sub-matrices of the permuted G(s) accordingly. Notice that the result in Eq. (55) gives the same
result as Eq. (14), when the dimension of the system is
two. In other words, Eq. (55) can be used to represent
the EOP of 2-loop and 3-loop systems.
For systems with higher dimension, the derivation of
EOP will be the same as that for 3-loop system. If the
same simplification as Eq. (53) to approximate
Z=(I+G2,2Gc,2)1G2,1 is made, the same equation as
Eq. (55) will be resulted.
Having these EOPs, the design of controllers will
be the same as conducted in the similar way as that
of 2-loop systems. But, as dimension of process
increases, design based on the formulated EOPs will
become more difficult compared with that of 2- or
3-loop systems. One of the reasons is due to the
expansion of modeling error associated with the
EOPs. In a 2-loop system, modeling error associated
with gi is directly resulted from substituting hi with
its benchmark form. But, in a system with more
loops, the modeling error of the EOPs will have two
sources: one from the use of benchmark form for hi
and the other from the simplification made for Z.
The expansion of modelling error would then limit
Table 4
Model of EOP and controller tuning for OR(33) process
Model of EOP
Tuning method
Proposed 1
BLT
BLT-4
Loop 1
Loop 2
Loop 3
0:336ð4:565sþ1Þe2:60s
16:36s2 þ4:354sþ1
kc1
R1
1:356ð4:444sþ1Þe3:0s
13:12s2 þ4:295sþ1
kc2
R2
0:594ð0:0054sþ1Þe1:0s
0:025s2 þ4:191sþ1
kc3
R3
1.994
1.510
1.214
4.35
16.40
20.35
D1
3.76
f1
4.565
0.32
0.016
0.422
0.295
0.77
4.295
18.00
11.04
D2
3.054
f2
4.444
0.71
0.036
2.825
2.630
4.879
4.191
6.61
3.57
Fig. 11. Responses and IAE values (in parentheses) of multi-loop control for OR(33) process.
D3
0.0059
f3
0.0054
0.30
0.015
784
H.-P. Huang et al. / Journal of Process Control 13 (2003) 769–786
the availability of loop gains. On the other hand, the
conditions similar to those in Theorem 1 for 2-loop
system will become a little awkward if dimension goes
higher.
4.2. Illustrative examples
1. Illustrative example 1
The Ogunnaike and Ray (OR 33) process [31]
as follows is considered.
G p ð sÞ ¼
2
0:66e2:6s
6 6:7s þ 1
6
6 1:11e6:5s
6
6
6 3:25s þ 1
6
4 34:68e9:2s
8:15s þ 1
0:61e3:5s
8:64s þ 1
2:36e3s
5s þ 1
46:2e9:4s
10:9s þ 1
3
0:0049es
7
9:06s þ 1
7
7
1:2s
0:01e
7
7
7
7:09s þ 1
7
s 5
0:87ð11:61s þ 1Þe
ð3:89s þ 1Þð18:8s þ 1Þ
ð56Þ
Table 5
Model of EOP and controller tuning for A1(44) process
Loop 1
Model of EOP
Tuning method
Proposed 1
BLT
Lee et al. [8]
Loop 2
0:696e2:50s
356:48s2 þ15:36sþ1
kc1
R1
3.533
2.28
0.385
15.36
72.2
34.72
D1
23.20
f1
1.160
Loop 3
1:392e1:01s
17:31sþ1
0
k0c2
R2
7.311
2.94
6.19
17.13
7.48
21.8
0
D2
0.404
f2
0.020
Loop 4
1:691e1:01s
5:74sþ1
0
k0c3
R3
2.017
1.18
2.836
5.74
7.39
19.22
0
D3
0.404
f3
0.020
2:807e1:15s
138:94s2 þ36:80sþ1
kc4
R4
4.563
2.02
0.732
Fig. 12. Responses and IAE values (in parentheses) of multi-loop control for A1(44) process.
36.80
27.8
36.93
D4
3.776
f4
0.189
H.-P. Huang et al. / Journal of Process Control 13 (2003) 769–786
For OR (33) process, ultimate gains and ultimate
frequencies are found from the frequency responses of
the gi ,i=1,2,3. These computed data designated as
predicted values with gi in Table 2. The steady-state
gains for each loops are also computed and are given in
the same table. The simple transfer function models of
EOPs are thus obtained by fitting their Bode’s diagrams
and are given as follows:
Loop 1 :
Loop 2 :
Loop 2 :
0:336ð4:565s þ 1Þe2:6s
16:36s2 þ 4:354s þ 1
1:356ð4:444s þ 1Þe3s
g2 13:12s2 þ 4:295s þ 1
0:594
ð0:0054s þ 1Þes
g2 0:025s2 þ 4:191s þ 1
g1 Based on these transfer functions, PID controllers are
obtained from the inverse of parametric models as given
in Table 4. Simulation results and IAE values are given
in Fig. 11.
2. Illustrative example 2
Consider the process of Alatiqi case 1 (A1 44) [1]:
G p ð sÞ ¼
2 2:22e2:5s
ð36sþ1Þð25sþ1Þ
6
6 2:33e5s
6 ð35sþ1Þ2
6
6 1:06e22s
6 ð17sþ1Þ2
4
5:73e2:5s
ð8sþ1Þð50sþ1Þ
2:94ð7:9sþ1Þe0:05s
ð23:7sþ1Þ2
0:017e0:2s
ð31:6sþ1Þð7sþ1Þ
0:64e20s
ð29sþ1Þ2
3:46e1:01s
32sþ1
0:51e7:5s
ð32sþ1Þ2
1:68e2s
ð28sþ1Þ2
3:511e13s
ð12sþ1Þ2
4:41e1:01s
16:2sþ1
5:38e0:5s
17sþ1
4:32ð25sþ1Þe0:01s
ð50sþ1Þð5sþ1Þ
1:25e2:8s
ð43:6sþ1Þð9sþ1Þ
4:78e1:15s
ð48sþ1Þð5sþ1Þ
ð57Þ
Eq. (55) is used to formulate EOPs of this 44 system.
The resulting dynamic models of these EOPs are given
in Table 5. Based on these models, the PID controllers
are synthesized and are given in the same table. Notice
that for FOPDT model, the value of ko is defaulted as
0.6 and for SOPDT model, the value of ko is given as
0.4. Simulation results for step changes are given in
Fig. 12. The results show that performance of these
loops are compatible to all other reported designs or
even better.
3
7
7
7
7
7
7
5
785
with a 33 system to obtain a general form. With these
EOPs, dynamic models in terms of FOPDT or SOPDT
dynamic models are identified, and PI/PID controllers
are designed accordingly. It is found that these formulated EOPs can predict the finally resulted ultimate
gain and ultimate frequency quite well at the beginning.
As a result, controllers in each of loops can be designed
independently. The effectiveness of this proposed
method in designing multi-loop controllers can be
observed from those simulated examples that covers
from 2-loop systems to 4-loop systems. The independent
design makes the controller synthesis more easier. The
performance of the systems are compatible to or better
than those other methods reported in literature.
As has been mentioned, in formulating the EOPs for
design, it is inevitable that modeling errors will be
introduced. For 2-loop system, these modeling errors
are resulted from substituting benchmarks for hi (s). For
higher dimensional systems, further modeling errors will
be resulted from simplification made to derive the general form of the EOPs. Consequently, the feasible region
of design (i.e. the availability of each loop gain) will
then be subjected to these modeling errors. The situation will be more and more critical, if the dimension
of the system become higher and higher.
The other issue needed to be mentioned is the conditions to assurance of stability from those independently
designed controllers. It is much easier to handle the
conditions in low dimensional systems. But, for higher
dimensional systems, conditions will become awkward,
and checking for these conditions would become more
tedious. A more efficient way to assure the stability of
the system from these controllers at their design stage
would be desirable.
From the advantages and disadvantages as depicted,
it can concluded that this proposed method is effective
for low dimensional system. Fortunately, many of chemical plant units are of this type (e.g. a dual-loop system for composition control in a distillation column).
As for higher dimensional system, cautious steps should
be taken to assure the stability of the system.
References
5. Conclusions
In this paper, an effective open-loop (EOP) transmission from ui to yi is formulated to decompose the design
of a multi-loop system into tasks of designing controllers in a number of equivalent single loops. By using
a proposed benchmark form to represent the dynamics
of single loops [i.e. hi(s), i=1,2,. . .,n], the EOPs are formulated in detail for 2-loop systems to bypass the needs
for controller dynamics in the other loops. Formulation
of the EOPs for systems that have more loops starts
[1] W.L. Luyben, Simple method for tuning SISO controllers in
multivariable systems, Ind. Eng. Chem. Process Des. Dev. 25
(1986) 654–660.
[2] T.J. Monica, C.C. Yu, W.L. Luyben, Improved multiloop singleinput/single-output (SISO) controllers for multivariable processes, Ind. Eng. Chem. Res. 27 (1988) 969–973.
[3] D.Q. Mayne, The design of linear multivariable systems, Automatica 9 (1973) 201–207.
[4] M.S. Chiu, Y. Arkun, A methodology for sequential design of
robust decentralized control systems, Automatica 28 (1992) 997–
1001.
[5] M. Hovd, S. Skogestad, Sequential design of decentralized controllers, Automatica 30 (10) (1994) 1601–1607.
786
H.-P. Huang et al. / Journal of Process Control 13 (2003) 769–786
[6] S.J. Shiu, S.H. Hwang, Sequential design method for multivariable decoupling and multiloop PID controllers, Ind. Eng.
Chem. Res. 37 (1998) 107–119.
[7] S.H. Shen, C.C. Yu, Use of relay-feedback test for automatic
tuning of multivariable systems, AIChE Journal 40 (4) (1994)
627–646.
[8] J. Lee, W. Cho, T.F. Edgar, Multiloop PI controller tuning for
interacting multivariable processes, Comp. Chem. Eng. 22 (11)
(1998) 1711–1723.
[9] Q.G. Wang, T.H. Lee, Y. Zhang, Multi-loop version of the
modified Ziegler–Nichols method for two input two output process, Ind. Eng. Chem. Res. 37 (1998) 4725–4733.
[10] J. Bao, J.F. Forbes, P.J. McLellan, Robust multiloop PID controller design: a successive semidefinite programming approach,
Ind. Eng. Chem. Res. 38 (1999) 3407–3419.
[11] C.G. Economou, M. Morari, Internal model control: 6. multiloop design, Ind. Eng. Chem. Proc. Des. Dev. 25 (1986) 411–419.
[12] P. Grosdidier, M. Morari, Interaction measures for systems
under decentralized control, Automatica 22 (1986) 309–319.
[13] S. Skogestad, M. Morari, Robust performance of decentralized
control systems by independent designs, Automatica 25 (1) (1989)
119–125.
[14] M. Hovd, S. Skogestad, Improved independent design of robust
decentralized controllers, J. Process Control 3 (1) (1993) 43–51.
[15] I.L. Chien, H.P. Huang, J.C. Yang, A simple multiloop tuning
for PID controllers with no proportional kick, Ind. Eng. Chem.
Res. 38 (1999) 1456–1468.
[16] I.L. Chien, H.P. Huang, J.C. Yang, A simple TITO method suitable for industrial applications, Chem. Eng. Comm. 182 (2000)
181–196.
[17] Z.J. Palmor, Y. Halevi, T. Efrati, Limit cycles in decentralized
systems, Int. J. Control 56 (4) (1992) 755–765.
[18] A.P. Loh, C.C. Hang, C.X. Quek, V.U. Vasnani, Autotuning of
multiloop proportional-integral controllers using relay feedback,
Ind. Eng. Chem. Res. 32 (1993) 1102–1107.
[19] Z.J. Palmor, Y. Halevi, T. Efrati, A general and exact method for
determining limit cycles in decentralized relay systems, Automatica 31 (9) (1995) 1333–1339.
[20] Z.J. Palmor, Y. Halevi, N. Krasney, Automatic tuning of decentralized PID controllers for TITO processes, Automatica 31 (7)
(1995) 1001–1010.
[21] Y. Halevi, Z.J. Palmor, T. Efrati, Automatic tuning of decentralized PID controllers for MIMO processes, J. Process Control
7 (2) (1997) 119–128.
[22] D.S. Hwang, P.L. Hsu, A practical design for a multivariable
proportional-integral controller in industrial applications, Ind.
Eng. Chem. Res. 36 (1997) 2739–2748.
[23] W.Z. Zhang, J. Bao, P.L. Lee, Decentralized unconditional stability conditions based on the Passivity Theorem for multi-loop
control systems, Ind. Eng. Chem. Res. 41 (2002) 1569–1578.
[24] H.P. Huang, M. Ohshima, I. Hashimoto, Dynamic interaction and
multi-loop system design, J. Process Control 4 (1) (1994) 15–24.
[25] H.P. Huang, J.C. Jeng, Monitoring and assessment of control
performance for single loop systems, Ind. Eng. Chem. Res. 41
(2002) 1297–1309.
[26] P.J. Campo, M. Morari, Achievable closed-loop properties of
system under decentralized control: conditions involving the
steady-state gain, IEEE Trans. Automatic Control 39 (5) (1994)
932–943.
[27] R.K. Wood, M.W. Berry, Terminal composition control of a
binary distillation column, Chem. Eng. Sci. 28 (1973) 1707–1717.
[28] C.D. Vinante, W.L. Luyben, Experimental studies of distillation
decoupling, Kem. Teollisuus 29 (1972) 499.
[29] B.A. Ogunnaike, W.H. Ray, Process Dynamics, Modeling and
Control, Oxford University Press, New York, 1994.
[30] A. Basilevsky, Applied Matrix Algebra in the Statistical Science,
Elsevier Science Publishing Co, North-Holland, 1983.
[31] B.A. Ogunnaike, W.H. Ray, Multivariable controller design for
linear systems having multiple time delays, AIChE J. 25 (1979)
1043–1057.