Rapport et Proces-Verbaux des Reunions - Volume 189 - 1990
advertisement

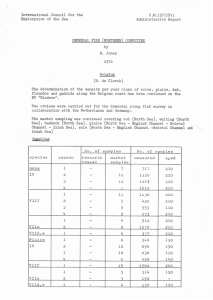
S e s s i o n 3: Fi sh b e h a v i o u r a n d th e q uality o f a c o u s t i c d a ta e f f e c t s o f s a m p l i n g , v e s s e l s , and survey design Rapp. P.-v. Réun. Cons. int. Explor. Mer, 189: 112-122. 1990 Fish behaviour: achievements and potential of high-resolution sector-scanning sonar G . P. A r n o l d , M . G r e e r W a l k e r , an d B . H . H o l f o r d Arnold, G. R , G reer Walker, M.. and Holford, B. H. 1990. Fish behaviour: achieve­ ments and potential of high-resolution sector-scanning sonar. - Rapp. P.-v. Réun. Cons. int. Explor. Mer, 189: 112-122. High-resolution sector-scanning sonar, operating at a frequency of 300 kHz. has been used in conjunction with a series of transponding acoustic tags to observe the behaviour of unrestricted, identified, individual fish in the open sea. Observations of the behaviour of individual fish have been used to predict patterns of behaviour in natural populations, and these predictions have been tested by independent methods. The advantages and disadvantages of existing techniques of acoustic telemetry are discussed in the context of future research requirements and possible technical developments. G. P. Arnold, M. Greer Walker, and B. H. Holford: Ministry o f Agriculture, Fisheries and Food, Directorate o f Fisheries Research, Fisheries Laboratory, Lowestoft, Suffolk N R 330H T , England. Introduction The Fisheries Laboratory, Lowestoft, has been associ­ ated with the application of sector-scanning sonar to fisheries problems for 25 years (Harden Jones and McCartney, 1962; Cushing and Harden Jones, 1966) and has been actively engaged in acoustic telemetry since 1970, following the installation in RV “CHone” (Mitson and Cook, 1971) of the high-resolution sectorscanning sonar invented by Dr G .M . Voglis of the Admiralty Research Laboratory (A R L ), Teddington. The A R L scanner and its solid-state counterpart (the MA FF scanner) developed at Lowestoft (Holley et al. , 1975) have been used to study some of the aspects of fish behaviour that are thought to determine the distri­ bution of fish populations or to bias indices of pop­ ulation abundance derived from trawling or acoustic surveys. The scanners have been used in conjunction with a transponding acoustic tag, which returns a powerful and unambiguous signal when ensonified by the outgoing signal of the sonar. The tag is small (5 cm long x 1 cm in diameter) and unlikely to affect the swimming per­ formance of the fish in any significant way (Arnold and Holford, 1978). Various technical improvements have © British Crown copyright, 1990. 112 been made to the tag since its original invention (Mitson and Storeton West, 1971), and two telemetric tags have been developed from it. One telemeters heart rate in real time (Storeton West et a i , 1978); the other - a much larger tag - measures the compass heading of the fish assigned to one or other of eight nominally 45° sectors (Mitson et al., 1982; Pearson and Storeton West, 1987). When the compass tag is interrogated at 300 kHz it responds with a reference pulse, which is used to determine the position and depth of the fish in the usual way (Greer Walker et al. , 1978). The compass heading is indicated by a second pulse and the delay between the two signals (ranging from 24 to 66 ms in seven 6-ms steps) identifies the relevant sector. The two pulses are shown on the B-scan sonar display and on a paper recorder (Harden Jones, 1981; Harden Jones and Arnold, 1982). The M A FF scanner with a scan con­ verter, improved controls, displays and new data-logging facilities has been installed in our new research vessel RV ’‘Corystes" which was commissioned in 1988 and which has replaced RV “Clione” . The key features of the acoustic tracking system are: (i) an imaging sonar, which can reveal details of fish­ ing gear, wrecks, and bottom topography; (ii) the ability to determine the position of individually identified targets in three dimensions (depth is very important); (iii) the ability to make observations independently of underwater visibility and ambient light intensity; (iv) a mobility which matches that of free-ranging fish; and (v) the ability to telemeter environmental or physio­ logical data from the tagged fish back to the ship. The technique has been applied to three main areas of research: (1) to describe the reactions of plaice (P le u ro nectes p la te ss a ) to a Granton otter trawl and measure the efficiency of the gear; (2) to follow the movements of migratory fish in the southern North Sea in relation to the tidal streams; and (3) to telemeter the compass heading from free-ranging fish. The key contribution of the technique has been that it has allowed us to observe the behaviour of unrestricted, identified, individual fish in the open sea. From these observations, we have been able to predict patterns of behaviour in natural populations and test these pre­ dictions by independent methods. This point is illus­ trated by reference to two examples: migration by selec­ tive tidal stream transport; and vertical migration of cod in relation to pressure. The estimates of the efficiency of the Granton trawl have already been published (Harden Jones et a i , 1977; Harden Jones, 1980; Harden Jones and Arnold, 1982), and the descriptions of the reactions of individual fish to the various components of the gear - the subject of a separate evening presentation to the International Symposium on Fisheries Acoustics in Seattle in June 1987 - will be published elsewhere. M i g r a ti o n by s e l e c t i v e tidal s tr e a m tr an sport Water currents can provide transport or directional in­ formation for migrating fish. On the European conti­ nental shelf, where tides are an important feature of the physical environment, we believe that stocks of de­ mersal fish may be largely contained within the bounda­ ries of the tidal stream paths. O ur belief is based on the demonstration of a pattern of vertical migration linked to the tidal streams, which we have called selective tidal stre a m tra n sp o rt (Greer Walker et a l., 1978), and which we have observed in species as diverse as plaice, sole (S o lea so le a ), cod ( G a d u s m o r h u a ), dogfish ( S c y lio r h in u s c a n ic u la ), and silver eels (Anguilla a n g u illa ). Selective tidal stream transport The transport system is deceptively simple. The fish leaves the bottom at one slackwater and is carried downstream for part or all of the duration of the trans­ porting tide. It returns to the bottom at the next slack­ water and remains there for the duration of the oppos­ ing tide, making no significant movement. The fish 8 R apports et Procès-Verbaux moves up into midwater approximately every 12 h and the vertical migration has a semi-diurnal periodicity.1 In plaice, such behaviour is characteristic of the seasonal spawning migrations and thus of large-scale geograph­ ical movements. On the feeding grounds in summer and the spawning grounds in winter, there is a different pattern of behaviour. The vertical migration then has a diurnal (24 h) periodicity and a proportion of the pop­ ulation moves into midwater at night. These vertical movements are not linked to a particular direction of the tidal stream and appear to be associated with local movements in search of food or a spawning partner. At both scales, the net direction of movement over the ground is determined primarily by the tidal stream, and transport appears to be essentially passive. We think the fish may obtain information about the speed and direc­ tion of the tidal stream when it is on, or close to, the seabed but not when it is in midwater. Evidence Evidence in support of these hypotheses comes from: (1) tracks of individual acoustically tagged fish (Greer Walker et a l., 1978, 1980; Arnold, 1981; Harden Jones and Arnold, 1982; Arnold and Cook, 1984; McCleave and Kleckner, 1985; and additional unpublished obser­ vations); (2) midwater trawling experiments for plaice on feeding grounds (Arnold, 1981) and spawning grounds (Arnold and Cook, 1984) in the southern North Sea and along the line of the western migration route into the Southern Bight (Harden Jones et cd., 1979); and (3) the results (still largely unpublished) of experi­ ments with plaice fitted with transponding acoustic com­ pass tags (Harden Jones, 1981, 1984; H arden Jones and Arnold", 1982). C om pass heading Seven plaice fitted with transponding acoustic compass tags were tracked in the southern North Sea in 1979 and 1980. Although we have not yet completed the analysis of all the data collected during these tracks, it is already clear that the orientation of plaice on, or close to, the seabed is influenced both by the speed and direction of the tidal stream and by local bottom topography. And in midwater, although they may at times go round in circles (one fish completed nine consecutive circles in 80 minutes), plaice can maintain a surprisingly consistent heading, remaining within two 45° compass sectors for an hour or more (Harden Jones, 1981, 1984). At the same time, their heading in midwater is apparently un'The terms diurnal and semi-diurnal are used here in the same context as in physical oceanography (Defant, 1958, page 48), to describe tides and other cyclical phenomena with periods of about 24 and 12 h respectively, and not with the alternative connotation of day versus night. 113 +100 E o o 2 +50 n*644 n = 1102 ~o <D CD Q. tn E co a> cc ■o 5 -50 -1 0 0 OB MW 0600 0200 1400 GMT 1000 1800 22 00 24 May 1980 Figure 1. The compass heading of plaice 3 in relation to the speed and direction of the tide while the fish was on the bottom (OB) on 24 May 1980. The compass heading was sampled every 20 s. The time recorded in each sector is expressed as a proportion of the total num ber of observations for each of three periods (0318 -0 9 2 5 h, 0925-1600 h, 1645-2104 h) indicated by vertical dashed lines. No data were recorded between 1600 and 1645 h. The length of the radius between the inner and outer circles corresponds to 100 % and + indicates observations amounting to less than 2 % of the total. The predicted directions of the northand south-going tidal streams were 15° and 196°, respectively. The fish was in midwater (MW) from 2104 h. affected by a reversal in the direction of the tidal stream. These points are illustrated here by reference to previously unpublished data from selected portions of plaice compass tracks 2, 3, and 4. For example. Figure 1 shows that plaice 3 reversed its heading twice to oppose the direction of the prevailing Excluding touchdowns Mean current 50cm s _1 tidal stream during an extended period on the bottom. On each occasion the change of heading occurred 1 - 2 hours after slackwater, during the accelerating phase of the tide. Plaice 2 headed downstream (compass sectors 6, 7, and 8) during the course of four successive ex­ cursions to the seabed (Fig. 2). These visits to the bot- Touchdowns 6 E o o 20 n = 26 0 n = 40 n a> > 0 A cd n D> <D 1 0 L l_ 220 0 2230 GMT 114 2300 4 June 1979 2330 Figure 2. The compass heading of plaice 2 during an extended period in midwater on 4 June 1979. The changes of heading apparently associated with the brief periods of touchdown occurred during the time intervals indicated by the horizontal black bars. The compass sectors are identified by the numbers 1 to 8 in the right-hand circle. 0900 a ! 1 Figure 3. The compass heading of plaice 4 in midwater for eleven consecutive 15-min periods between 0900 and 1145 h on 27 May 1980. The compass heading was sampled every 20 s, and each circular distribution is therefore based on a total of 45 samples. The geographic position of the fish is indicated by open and closed circles, which correspond to north-going and south-going tides, respectively. The half-closed circle indicates the predicted time of reversal of the tidal stream at local highwater. P re ssure an d vertical m i g r a t i o n o f c o d tom occurred at intervals throughout a period of down­ stream transport in midwater, during which the fish otherwise maintained a cross-tide heading in compass sectors 1 and 2. At this time of night (sunset 2000 h, sunrise 0330 h, approximately) the fish is unlikely to have had a visual reference point when it went to the bottom, and may therefore have oriented to the current as a result of tactile stimuli. Plaice 4 (Fig. 3) experienced three reversals of tide during a 20-h period in midwater at the end of a 48-h track, and remained entirely in midwater for two of them. On each occasion, the fish adopted a heading at the end of a south-going tide and maintained it for a period of 2 to 2.5 h, extending over the ensuing high-water slack and into the initial period of the next north-going tide. During the first tidal stream reversal, plaice 4 maintained an easterly heading at night for a period of 2.25 h; during the second re­ versal, it maintained a southwesterly heading by day for 2.5 h (Fig. 3). On each occasion, the heading subse­ quently changed only after the fish had made an ex­ cursion to the seabed. As a plaice in midwater at night has no visual reference point against which it can detect its displacement by the current, it seems that some other reference system must account for the consistency of heading in midwater. Inertial or magnetic clues are obvious possibilities. 8- The swimbladder is the main source of acoustic reflec­ tion in those fish that have one. Changes in target strength that accompany vertical migration as a result of a change in body attitude, or a change in swimbladder volume, are therefore of interest as a source of bias when acoustic methods are used to estimate fish abun­ dance. Some of our observations on the behaviour of acoustically tagged cod in the southern North Sea are relevant to this problem. Physiology and behaviour The cod has a closed compliant swimbladder which occupies 5 % of the volume of the fish. Pressure changes caused by vertical movements lead to expansion or con­ traction of the swimbladder gas and the fish responds to the accompanying changes in density with compensa­ tory swimming movements and resorption or secretion of gas. Secretion is rather slow and is temperature de­ pendent. Resorption, which is very much faster, is pres­ sure dependent, and the difference between the two rates increases with pressure (Harden Jones and Scholes. 1985). The rates of secretion and resorption impose limita­ tions on the extent of any vertical movements that the fish may make while remaining neutrally buoyant. U n ­ der experimental conditions, cod can cope with reduc115 tions of 25 % and increases of 50 % of the pressure to which they were originally adapted without showing any abnormal behaviour (Harden Jones and Scholes, 1985). These limits define a free vertical range within which the fish should be able to move without experiencing any exceptional buoyancy problem. The range of verti­ cal movement is substantial; it increases with depth and the fish has greater freedom of movement in the down­ ward direction. Classically, the swimbladder has been regarded as a hydrostatic organ which enables the fish to remain in neutral buoyancy at all times of the day and night, regardless of depth. More recently it has been argued that fish which make extensive vertical migrations are in neutral buoyancy only at the top of their vertical range (Konstantinov, 1965; Alexander, 1966; Tytler and Blaxter. 1973; Blaxter and Tytler, 1978). And Harden Jones and Scholes (1985) point out that the results of their laboratory experiments could be reconciled with field observations if cod, which remained on or near the seabed by day, had an incompletely filled swimbladder and were negatively buoyant when on the bottom. D ur­ ing vertical migration, these fish would be expected to swim up into midwater until they reached (he depth at which they were in neutral buoyancy following the nat­ ural expansion of the swimbladder with reduced pres­ sure. The swimbladder would thus set an upper level to the extent of the vertical migration, but the rate of vertical movement and the time spent in midwater would both be free from restriction. Our observations are generally consistent with this second hypothesis, and the rates of descent of fish in midwater are in agreement with the rates of secretion determined exper­ imentally by Harden Jones and Scholes (1985). Tracking experim ents We have tracked 24 cod in the southern North Sea (Arnold et al., subm.). Three fish were released at the surface, the others from cages on the seabed at depths of 24 to 73 m. Each fish was allowed an adaptation period judged to be appropriate to the particular depth; the longest period was 150 h. We have assumed that, on release, each fish adopted a depth in the water column close to that at which it would have been neutrally buoyant had it been secret­ ing gas at the expected rate for the whole adaptation period. We have calculated the expected depth of neu­ tral buoyancy for each fish from the predicted rate of descent, the adaptation time, the sea temperature, and the depth of the cage, and compared it with the ob­ served depth of the fish on release. Nine of the 21 fish released at the seabed appeared to have achieved neutral buoyancy, in that they remained within the upper limit of the free vertical range for the predicted depth of neutral buoyancy. The other 12 fish took up a depth in midwater which was shallower than 116 Tabic 1. Observed and predicted rates of adaptation of cod in midwater (Arnold el al., subm.). Fish Depth of cage (m) Observed rate of adaptation in midwater (m h _I) Predicted rate of adaptation Ratio: observed rate predicted rate (m h ') (a) Cod released at the surface 2 3 0.83 0.46 0.84 0.83 1.0 0.6 0.74 0.72 0.72 0.74 0.4 1.0 1.0 0.4 (b) Cod released al the seabed 9 10 11 14 23 40 44 36 0.3 0.7 0.7 0.3 that to which they were expected to have become adapted. On, or shortly after, release they moved above the upper limit of the free vertical range for the pre­ dicted depth of neutral buoyancy. Most remained in midwater and several made repeated excursions to and from the bottom for the remainder of the track. Five of the 12 fish showed a slow progressive increase in depth in midwater indicative of continuing gas secretion. These observations suggest that the rates of gas secre­ tion in some of our caged cod were slower than those observed in the laboratory experiments. This conclusion is borne out by the rates of descent observed subse­ quently with fish in midwater. None was faster than the predicted rate but several were slower and, although all were within the 95 % confidence limits for the relation­ ship between the mean rate of adaptation and temper­ ature given by Harden Jones and Scholes (1985), some (Table 1) were less than half the predicted rate. Cod 3, for example, which was released at the surface, de­ scended at a rate of approximately 0.5 m h ' 1 - sub­ stantially slower than predicted - and had apparently not reached equilibrium before the end of the track. Cod 11, on the other hand, which was released from a cage, came up to a depth of 10 m on release and sub­ sequently descended at a rate very close to the predicted rate of 0.7 m h 1 (Fig. 4). Although several of these fish went to the bottom for varying periods during the course of the descent, none moved above the upper limit of the free vertical range corresponding to the mean rate of descent. In addition to the rather slow progressive increase in depth in midwater indicative of continuing gas secre­ tion, most cod exhibited rapid vertical movements both on release and at the beginning and end of each major midwater excursion. Most of the cage-adapted fish came up into midwater immediately on release, some so rapidly that it was impossible to follow their movements with the sonar because they were too close to the ship while the cage was being retrieved. Those fish whose 0-1 20- E c ■C Q. Q> O 40- 60GMT -|— i— i t t ~ t — i— i 16 27 18 20 April 22 i— i— i— i 24 i— i— i— i— i 02 04 28 April 06 r 08 i 10 n 12 i i i 14 i 16 i r 18 Tide Figure 4. The depth of cod 11 by day (sunrise 0430 h) and night (sunset 1910 h) in relation to the predicted depth of neutral buoyancy on release (arrow). The mean rate of descent is indicated by the solid line and the equivalent upper and lower limits of the free vertical range by dashed lines. Open bars indicate north-going (N) tides and black bars south-going (S) tides. behaviour on release could be monitored ascended at rates up to 3 m min“ 1 (Table 2) and experienced pres­ sure reductions of between 30 and 60 %. Vertical move­ ments of comparable rapidity occurred throughout many of the subsequent tracks. Most occurred at rates within the range 0.5—1 m m in-1, although two descents were observed at speeds in excess of 3 m min-1. D epth o f neutral buoyancy A fish in neutral buoyancy in midwater becomes pro­ gressively more dense as it descends towards the bot­ tom, and its descent is assisted by its increasing negative buoyancy. Rapid descents to the bottom, therefore, reveal little about the level at which the fish is in neutral buoyancy. Rapid ascents, however, can demonstrate that the fish cannot have been in neutral buoyancy both on the bottom and in midwater. The rates of movement for rapid vertical ascents in excess of 10 m from the bottom are shown in Figure 5 plotted as ln(P,/P2) against time, where P, and P, are the pressures in atmo­ spheres corresponding to the greater and lesser depths, respectively. The rates of ascent are outside the 95 % confidence limits for the mean rate of gas resorption determined experimentally by Harden Jones and Scholes (1985), such that the fish cannot have been in neutral buoyancy throughout the ascent. The ascents of cod 11 between 0000 and 0015 h and 1230 and 1300 h on 28 April (Fig. 4) involved vertical movements of 26—35 m, rates of ascent of 2.3 and 0.9 m min ' and pressure reductions of 57 and 45 % respectively. The Table 2. Rates of ascent and percentage pressure reductions on release for fish not adapted to depth. P, and P, are the pressures (ATA) corresponding to the initial and final depths (Arnold el al., subm.). Fish 9 10 11 14 17 19 23 Time interval (GMT) Initial depth (m) Final depth (m) Rate of ascent (m min-1) Pressure reduction (% ) ln(P,/P2) 0630-0645 1249-1300 1519-1545 1046-1050 1155-1255 2230-2300 1450-1456 23 40 44 36 31 45 40 8 13 9 23 13 21 26 1.0 2.4 1.3 3.2 0.3 0.8 2.3 44 54 64 29 45 44 27 0.58 0.79 1.03 0.34 0.59 0.59 0.31 117 Figure 5. Time taken by acoustically tagged cod to make vertical ascents in excess of 10 m from the bottom in relation to the magnitude of the pressure reduction (ln(P|/P2)). The iinear regression (Harden Jones and Scholes, 1985) defines the time required for a cod in neutral buoyancy on the bottom to make a vertical ascent while resorbing gas and remaining in neutral buoyancy. The dashed lines indicate 9 5% confidence limits about the mean. 70 c o 50 = 13 T3 a> a> i— a 40 œ CD al 50 100 Time (minutes) same argument applies to the vertical tracks of several other fish, including the initial ascents on release shown in Table 2. Fish that are still adapting to depth are clearly neu­ trally buoyant in midwater and negatively buoyant on the bottom. The same conclusion applies to cod 23 (Fig. 6), which was not adapted to the predicted depth, and which showed no evidence of any further adapta- 20Figure 6. The depth of cod 23 in relation to the predicted depth of neutral buoyancy on release (solid arrow, left). The dashed line indicates the upper limit of the equivalent free vertical range. The dashed arrow, right, indicates the estimated depth of neutral buoyancy calculated from the depth of the shallowest vertical excursion. 118 CL a> Q GMT 40 60 20 21 April Tide 24 04 22 April 08 24 04 23 April E c JZ Figure 7. The depth of cod 20 in relation to the predicted depth of neutral buoyancy on release. Details as in Figure 6 and earlier figures. 20- CL CD O 40- GMT 20 24 04 08 30 May 31 May Tide ■ S N m 12 16 20 24 04 08 1 June 12 16 20 S tion after its release from the cage. It made five ascents involving pressure reductions of 32 to 51 % over periods of 9 to 40 min. A similar argument applies to cod 20, which on first inspection appeared to have been in neu­ tral buoyancy on the bottom (Fig. 7). During its mid­ water excursion between 1315 and 1345 h on 1 June, cod 20 rose 13 m above the bottom, experiencing a pressure reduction of approximately 30 %. The rate of ascent shows that the fish could not have been in neutral buoyancy on the bottom as well as in midwater. It seems probable, therefore, that cod 20 remained in neutral buoyancy at the original depth of 24 m - the depth of the cage - and was thus negatively buoyant on the bottom later in the track when the water became deeper. Three fish only may have been in neutral buoy­ ancy on the bottom: cod 21. which remained on the bottom at a depth of 28 m during 4-h surveillance after 150-h adaptation; cod 24, which made a single vertical excursion of 6 m into midwater from a depth of 66 m, before moving into shallower water; and cod 10, which made limited excursions into midwater during the last 12 h of its track after some 30 hours of adaptation in midwater. P o te n t ia l There are several areas of marine fisheries science in which there are important behavioural problems am e­ nable to solution by the application of acoustic teleme­ try. Three areas are of obvious interest: gear and beha­ viour; behaviour in relation to acoustic survey; and behaviour in relation to the environment. A substantial amount of research is appropriate in all three. G ear and behaviour Rational controls on effort are needed in the heavily exploited shellfisheries of England and Wales. In this context, it would be useful to describe the behaviour of lobsters and crabs in relation to baited pots and creels, and to determine the effective radius of operation and efficiency of the gear in relation to the mobility of the animal. We have recently shown that it is possible to track acoustically tagged lobsters (tagging can be ac­ complished underwater by a SCUBA diver) and think that there is considerable research potential in this area. Figure 8 shows the track of a lobster in Bridlington Bay on the northeast coast of England in June 1986. This animal was caught in a trap, tagged on the research vessel, and released on the seabed by diver. It was tracked by the research vessel for 62.5 h and showed a clear pattern of diurnal activity, remaining stationary by day and walking distances of several hundred metres by night. Similarly, there is scope for further studies of the reactions of finfish to both fixed and moving gear in relation to technological development and to rational exploitation and conservation. Avoidance reactions probably depend to a large extent on underwater visibil­ ity, and in this respect an acoustic technique permits observations and measurements that would be difficult to make either by diver or underwater television. B ehaviour and acoustic survey The problem of fish behaviour in relation to acoustic survey remains essentially unresolved, and this is a po­ tentially fruitful research area. One question of partic­ ular concern is whether there are systematic changes in target strength produced by behavioural or physiolog­ ical reactions to variations in the physical environment, which could bias the results of acoustic surveys or sug­ gest modifications to the way in which they are carried out. Target strength is affected not only by swimbladder volume, but also by changes in attitude on the part of the fish, and tilt angles of a few degrees are sufficient to introduce errors of up to 60 % into estimates of stock abundance (Foote, 1980). Attitude may change system­ atically by day and night as a result of vertical migration or changes in swimming speed (He and Wardle, 1986), or as the result of an avoidance reaction to a research vessel or its trawl. Changes in attitude could usefully be studied in the open sea with the tilt tag recently devel­ oped at Lowestoft (Mitson and Holliday, 1990) for use 119 100m 0100 53' 2300 0600 2200 1500-1930 2200 0410 0300 0200 0800h End 2100 2300 1936 2200 0200 2100 B rid lin gto n 0 1 0 0 , START B ay 1904 0300-2130 2400 Figure 8. The track of an acoustically tagged lobster (Hom arus gammarus) released in Bridlington Bay on 14 June 1986 and tracked for 62.5 h. Open circles indicate positions by day (sunrise 0330 h) and closed circles positions by night (sunset 2030 h); positions were recorded at 30-min intervals, except where otherwise indicated. Position was initially determined by reference to two long-life acoustic tags fixed on the seabed at locations 1 and 2, and later by reference to a m oored navigation buoy using radar. The tag signal was lost between 2300 h on 15 June and 1500 h on 16 June, and again between 2230 h on 16 June and 0100 h on 17 June. The depth of water was 1 3 -1 7 m. initially by the Norwegian Institute of Marine Research in Bergen. Such studies could overcome some of the limitations of existing experiments with caged fish. B ehav io ur and the environm ent Several stocks of fish on the European continental shelf appear to be behaviourally rather than genetically iso­ lated. Because their migration circuits are related to the movements of the water masses - to the residual circula­ tion during the egg and early larval stages, and to the tidal streams for the adults - a simple model which explained the distribution of populations in hydrody­ namic terms could be of practical use in fish-stock man­ agement. Some progress has been made at Lowestoft towards the production of such a model (Arnold and Cook, 1984), but there is scope for further work to test its validity. 120 Two complementary approaches would appear to be warranted. Further descriptive studies are required to investigate the generality of the tidal stream transport hypothesis. We need to know whether it is applicable over the whole of the European shelf, or whether di­ rected movements (of the type we have observed in cod and yellow eels in the coastal waters of the southern North Sea) are more im portant in areas with slower tidal streams. We also need to know whether it is appli­ cable only to demersal fish, or whether it could be relevant to the pelagic species. Experimental studies are needed to identify the factors that determine which pattern of vertical migration is adopted and the length of time for which it is maintained. We would also like to know how the semi-diurnal pattern of vertical migration is synchronized with the tidal streams to produce migra­ tion in a consistent direction and how the direction is reversed between pre- and post-spawning migrations. Technical d evelopm en ts A knowledge of the scale and seasonality of fish pop­ ulation movements is basic to effective fisheries man­ agement. It is also fundamental to the assessment of effects on the marine environment of dumping, marine pollution, and the spread of disease. In all respects, there is a need for a better understanding of the rela­ tionship between the behaviour of the fish and the phys­ ical. chemical, and biological features of the environ­ ment; and it is essential that these environmental factors are measured at scales of space and time appropriate to the processes under investigation (McCleave er al. . 1984). Acoustic telemetry is particularly suited to the short (hours and tens of metres) and - with a mobile system medium (days and tens of kilometres) scales, and has the great merit that the movements of identified individ­ ual fish can be followed in the open sea independently of the constraints imposed by confinement in cages or experimental tanks. Measurements of well-chosen phys­ ical factors - for example, temperature, salinity, light intensity, swimming speed - are particularly important at these scales (Laurs e ta l., 1977; Westerberg, 1984) and can be provided by the incorporation in the tag of a sensor, which can measure the appropriate factor in the immediate vicinity of the fish. Miniaturization of the sensor is the principal constraint. At the longer scales (months and hundreds of kilometres) difficulties arise because of the dependence on a dedicated research vessel and the short life - currently less than 100 hours of existing tags. The research vessel is expensive, may not be available at the appropriate time, or for a suffi­ ciently long period, and may be prevented from work­ ing by adverse weather. Ways round these difficulties are being sought, and are likely to include sonabuoys and data-storage tags for the collection of data for peri­ ods of several weeks or even months on end. Sonabuoys are appropriate to projects which require the collection of data over a limited range for long periods. D ata­ storage tags, which would be retrieved through the fish­ ery, or which might ultimately transmit recorded data by satellite (Hunter e ta l., 1986), would significantly increase the rate of data acquisition, and would prob­ ably offer substantial cost benefits when compared with existing techniques. R eferences Alexander, R. McN. 1966. Physical aspects of swimbladder function. Biol. Rev., 41: 141-176. Arnold. G .P. 1981. Movements of fish in relation to water currents. In Animal migration, pp. 5 5 - 7 9 . Ed. by D .J . Aidley. Cambridge University Press. Cambridge, England. Arnold, G. P., and Cook, P. H. 1984. Fish migration by selec­ tive tidal stream transport: first results with a computer simulation model for the European continental shelf. In Mechanisms of migration in fishes, pp. 227-261. Ed. by J . D . McCleave, G .P. Arnold, J . J . Dodson, and W. H Neill. Plenum Press, New York. USA. Arnold. G. P., and Holford, B. H. 1978. The physical effects of an acoustic tag on the swimming performance of plaice and cod. J. Cons. int. Explor. Mer, 38: 189—200. Arnold. G. P., G reer Walker, M., Emerson, L. S., and Hol­ ford, B .H . (Submitted). The movements of cod (Gadus m orhua L.) tracked in the southern North Sea. Blaxter, J. H. S., and Tytler, P. 1978. Physiology and function of the swimbladder. Adv. comp. Physiol. Biochem., 7: 311-367. Cushing, D. H., and Harden Jones, F. R. 1966. Sea trials with modulation sector-scanning sonar. J. Cons. int. Explor. Mer. 30: 324-345. Defant, A. 1958. Ebb and flow. The University of Michigan Press, Ann Arbor, Michigan, USA. Foote, K .G . 1980. Effect of fish behaviour on echo energy: the need for measurements of orientation distributions. J. Cons, int. Explor. Mer, 39: 193-201. G reer Walker, M., Harden Jones, F. R., and Arnold, G .P. 1978. The movements of plaice (Pleuronectes platessa L.) tracked in the open sea. J. Cons. int. Explor. Mer, 38: 5 8 -8 6 . G reer Walker, M.. Riley, J. D.. and Emerson, L. S. 1980. On the movements of sole (Solea soleci) and dogfish (Scyliorhinus canicula) tracked off the East Anglian coast. Neth. J. Sea. Res., 14: 66—77. Harden Jones, F. R. 1980. Acoustics and the fisheries: recent work with sector-scanning sonar at the Lowestoft Labora­ tory. In Advanced concepts in ocean measurements for m a­ rine biology, pp. 409-421. Ed. by F. P. Diemer. F. J. Vernberg, and D. Z. Mirkes. University of South Carolina Press, Columbia, South Carolina, USA. Harden Jones, F. R. 1981. Fish migration: strategy and tactics. In Animal migration, pp. 139-165. Ed. by D .J . Aidley. Cambridge University Press, Cambridge, England. Harden Jones, F. R. 1984. Could fish use inertial clues when on migration? In Mechanisms of migration in fishes, pp. 6 7 -7 8 . Ed" by J . D . McCleave, G .P. Arnold, J . J . Dodson, and W. H. Neill. Plenum Press, New York, USA. Harden Jones. F. R.. and Arnold, G. P. 1982. Acoustic teleme­ try and the marine fisheries. In Telemetric studies of ver­ tebrates, pp. 7 5 - 9 3 . Ed. by C. L. Cheeseman and R. B. Mitson. Academic Press, London, England. Harden Jones, F. R., and McCartney, B.S. 1962. The use of electronic sector-scanning sonar for following the move­ ments of fish shoals: sea trials on RRS "Discovery II". J. Cons. int. Explor. Mer, 27: 141-149. Harden Jones, F. R., and Scholes, P. 1985. Gas secretion and resorption in the swimbladder of the cod Gadus morhua. J. comp. Physiol., 155: 319—331. Harden Jones. F. R., Arnold, G. P.. G reer Walker, M., and Scholes, P. 1979. Selective tidal stream transport and the migration of plaice (Pleuronectesplatessa L.) in the southern North Sea. J. Cons. int. Explor. Mer, 38: 331-337. Harden Jones, F. R., Margetts, A. R., G reer Walker, M., and Arnold, G. P. 1977. The efficiency of the Granton otter trawl determined by sector-scanning sonar and acoustic transponding tags. Rapp. P.-v. Réun. Cons. int. Explor. Mer. 170: 4 5 - 5 Î . He, P . and Wardle, C .S . 1986. Tilting behaviour of Atlantic mackerel, Scomber scombrus, at low swimming speeds. J. Fish Biol., 29 (Supplement A): 223—232. Holley, M .L ., Mitson, R. B., and Pratt, A. R. 1975. Devel­ opments in sector scanning sonar. 1ERE Conf. Proc., 32: 139-153. Hunter, J R., Argue, A. W., Bayliff. W. H., Dizon, A. E., Fonteneau, A., G oodm an, D., and Seckel, G. R. 1986. The dynamics of tuna movement: an evaluation of past and fu­ ture research. FAO Fish. tech. Pap., (277): 1 -7 8 . 121 Konstantinov, K. G. 1965. Functions of the swimbladder of teleosts and their change in the course of phylogenesis. Zh. Obshch. Biol., 26: 53 8-545. (In Russian). Laurs, R. M., Yuen, H. S. H., and Johnson, J. H. 1977. Smallscale movements of albacore, Thunnus alalunga, in relation to ocean features as indicated by ultrasonic tracking and oceanographic sampling. Fish. Bull. U.S., 75: 347-355. McCleave, J. D., and Kleckner, R. C. 1985. Oceanic migra­ tions of Atlantic eels (Anguilla spp.): adults and their off­ spring. hi Migration: mechanisms and adaptive significance, pp. 316—337. Ed. by M. A. Rankin. Contrib. Mar. Sei., 27 (Supplement). McCleave, J . D . , Harden Jones, F. R., Leggett, W .C ., and Northcote, T. G. 1984. Fish migration studies: future direc­ tions. In Mechanisms of migration in fishes, pp. 545-554. Ed. by J . D . McCleave, G. P. Arnold, J .J . Dodson, and W. H. Neill. Plenum Press, New York, USA. Mitson, R. B., and Cook, J .C . 1971. Shipboard installation and trials of an electronic sector-scanning sonar. Radio Elec­ tron. Eng., 41: 339-350. Mitson, R. B., and Holliday, D. V. 1990. Future developments in fisheries acoustics. Rapp. P.-v. Réun. Cons. int. Explor. Mer. 189: 8 2 -9 1 . 122 Mitson, R. B., and Storeton West, T. J. 1971. A transponding acoustic fish tag. Radio Electron. Eng., 41: 483-489. Mitson, R. B., Storeton West, T. J., and Pearson, N. D. 1982. Trials of an acoustic transponding fish tag compass. Biotelem. Patient Monit., 9: 6 9 -7 9 . Pearson. N. D.. and Storeton West, T. J. 1987. The design of an acoustic transponding compass tag for free-swimming fish. In Electronics for ocean technology, pp. 8 3 - 9 2 . In­ stitution of Electronic and Radio Engineers, London, England. Storeton West, T. J., Mitson, R. B., and G reer Walker, M. 1978. Fish heart rate telemetry in the open sea using sectorscanning sonar. Biotelemetry, 5: 149-153. Tytler, P., and Blaxter, J . H . S . 1973. Adaptation by cod and saithe to pressure changes. Neth. J. Sea Res., 7: 3 1 - 4 5 . Westerberg, H. 1984. The orientation of fish and the vertical stratification at fine- and micro-structure scales. In Mecha­ nisms of migration in fishes, pp. 179 - 203. Ed. by J. D. McCleave. G .P. Arnold, J . J . Dodson, and W. H. Neill. Plenum Press, New York, USA.