Optimal Feedforward Filter Design for Flying Gauge Changes of a
advertisement

Preprints of the 18th IFAC World Congress
Milano (Italy) August 28 - September 2, 2011
Optimal Feedforward Filter Design for
Flying Gauge Changes of a Continuous
Cold Mill
Camile WJ Hol ∗ Steven Sujoto ∗∗ Marc de Boer ∗
Vincent Beentjes ∗ Mike Price † Carsten W. Scherer ∗∗∗∗
Anton A.J. van der Weiden ∗∗∗
∗
Tata Steel Research, Development & Technology, Rolling Metal
Strip, P.O. Box 10 000 1970 CA IJmuiden (e-mail:
camile.hol@tatasteel.com).
∗∗
Accenture, P.O. Box 75797, 1070 AT Amsterdam (e-mail:
steven.sujoto@accenture.com)
∗∗∗
Delft University of Technology, Delft Center for Systems and
Control (e-mail: a.j.j.vanderweiden@tudelft.nl)
∗∗∗∗
SRC SimTech Chair Mathematical Systems Theory, University of
Stuttgart, Pfaffenwaldring 57, 70569 Stuttgart, Germany, (e-mail:
Carsten.Scherer@Mathematik.uni-stuttgart.de)
†
Tata Steel Port Talbot Works, Port Talbot, Wales
(michael.price@tatasteel.com)
Abstract: In a continuous cold mill subsequent hot rolled strips are welded together before
rolling. The transition from strip A to strip B is called the Flying Gauge Change (FGC).
Exit thickness errors and large strip tension variations occur if the actuators are not adjusted
well during the transition. In this paper the model-based design of the FGC controller that
minimizes off-gauge length and tension variations is presented. This is done through nonlinear
local optimization of a cost function, that represents the economic cost of tension variations and
off-gauge as accurately as possible. Simulation results show that the resulting controller reduces
off-gauge and tension variations significantly, even if variation in friction and slip are taken into
account.
Keywords: control, cold rolling, optimization, feedforward filter
1. INTRODUCTION
Tata Steel in Europe is Europes second largest steel
producer with annual revenues of around 12 billion and a
crude steel production capacity of over 20 million tonnes.
One of the steps in the production process of the cold
rolled steel strip is the continuous cold rolling process. This
process takes place in a cold mill. This paper is concerned
with the 5-stand continuous cold mill at Port Talbot. The
input to this mill is a hot rolled steel strip that is made
continuous by welding the tip (i.e. the ends) from two
different hot rolled strips together (see Figure 1). These
strips can differ in terms of thickness, width, hardness and
profile of the strip.
The goal of the rolling process is to reduce the thickness
of the strip to a thickness as specified by the customer.
Each stack of work rolls and backup rolls is a stand. The
reduction takes place between the upper and the lower
work roll of each stand. The area where the work rolls
are in contact with the strip is called the roll gap. The
considered mill has five stands, see Figure 2. The strip
enters the mill through a bridle that connects the mill to
the pickling line. At the end of the mill, the continuous
strip is collected in a strip buffer. The strip is then cut
Copyright by the
International Federation of Automatic Control (IFAC)
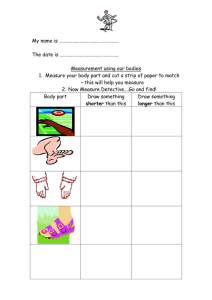
Fig. 1. The situation just before the welding point enters
a stand
again at the welds in separate strips and wound on a coiler
for further processing (e.g. annealing).
During the transition from strip A to strip B the actuators
are adjusted. The transition from strip A to B is denoted
as Flying Gauge Change (FGC). During this transition
phase the roll speed is significantly reduced. Furthermore
additional adjustments are made by the main actuators of
the mill:
8545
Preprints of the 18th IFAC World Congress
Milano (Italy) August 28 - September 2, 2011
• the speeds of the roll drive motors of every stand
• the gap position of every stand
If the speed and gap adjustments during FGC are not
performed well, exit thickness errors and large strip tension
variations occur(see also e.g. V.B. Ginzburg et al. (1993)).
Large tension variations result in strip breaks or pinches,
which may cause roll damage and long down-time. Exit
thickness outside the customer tolerances is denoted by
off-gauge. Off-gauge strip must be cut off and can only be
sold at a scrap price. Hence, large tension and thickness
variations lead to a significant increase in production cost.
The aim of the control system during FGC is to reduce
the tension and thickness variations as much as possible,
despite the different response times of the actuators. Due
to the fast transient nature of the FGC, this is the most
challenging phase during cold rolling.
FGC has been well addressed in the literature. In Yamashita (1987) the responses of the speed and gap actuators are synchronized using low-pass filters. In Pittner
et al. (2007) an LQ-optimal controller has been designed
using state-dependent Riccati Equations. The authors of
Wang et al. (2007) synchronize the speed and gap corrections as well. Furthermore, roll force and thickness
measurement are used to adjust the gap settings. In Kijima
et al., (1998) ‘standard’ thickness controllers, e.g. the
BISRA AGC and Mass flow AGC controllers, are modified
to address the transient behaviour during cold rolling.
All these methods do not explicitly take primary controller
objectives during FGC into account, i.e. they do not directly optimize for reducing tension and thickness variations. Furthermore, the uncertainty and inherent variation
of forward slip and friction conditions in the roll gap are
not considered explicitly in the papers mentioned above.
Nonlinearities due to the deformation process, controller
dead-bands and rate limiters play a dominant role in
the mill’s dynamic response. These important system
dynamics of a cold mill are omitted or linearized in
several of the approaches found in literature. Finally, the
techniques in those papers are often based on simulation
models that have not been validated by measurement data.
Contribution
The current paper presents a method,
based on time-domain optimization, to design a FGC
controller that minimizes off-gauge length and tension
variations. This is done through off-line nonlinear optimization of a cost function, that represents the economic
cost of tension variations and off-gauge as accurately as
possible. The cost-function evaluation is based on timedomain simulations of a rigorous simulation model that
has been validated by measurement data, and contains the
aforementioned nonlinear elements. The robustness of the
optimal controller is assessed against variations in friction
and forward slip.
Outline In Section 2 the dynamical model of the mill and
its controllers is presented and results of validation of this
model to measurement data are shown. In Section 3 the
causes of off-gauge and tension variations with the current
FGC control strategy are explained. On the basis of this,
the framework to optimize this controller is explained in
Section 4. The results thereof and the improvements in
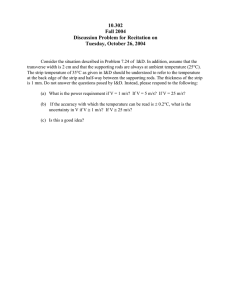
Fig. 2. Cold Mill at Port Talbot
terms of reduction of off-gauge and tension deviations
are shown in Section 5. Finally, conclusions are given in
Section 6.
Notation Capitals and small caps are used for the strip
property before and after the stand, respectively. For
instance, H2 is the entry thickness of stand 2 and h2
its exit thickness. Tension force and tension stresses are
distinguished by a subscript f or s, i.e. Tf 1 and Ts1 for
the entry tension force and stress of stand 1 respectively.
The index i is used for the stand. The symbol t is used for
time, whereas tf i is used for the tension force at the exit of
stand i. This should not cause confusion, since time never
has an index, whereas the tension is always with an index.
s is the Laplace Transform variable.
2. DYNAMIC MODEL OF A TATA STEEL 5-STAND
MILL
2.1 Rolling Process
The model to simulate Flying Gauge Changes is presented
in this section. It consist of the following elements:
•
•
•
•
•
•
the mass flow relation
the deformation model
the frame-stretch model
the interstand model
transport delays
the screw-position and roll speed actuator models
The mass flow relation (i.e. the conservation of mass)
implies
vi hi = Vi Hi ,
i = 1, . . . , 5
where vi and hi are the exit strip speed and thickness of
the ith stand respectively, Vi the entry strip speed and Hi
the entry strip thickness. The forward slip fi is defined
as the relative difference between the exit strip and roll
speeds Vp,i :
vi − Vp,i
fi :=
i = 1, . . . , 5
Vp,i
The roll force Pi and slip fi , i = 1, . . . , 5 are determined
by the deformation model, a nonlinear static function
based on a Coulomb friction model and Orowan’s equation
[Orowan (1943)]:
(Pi , fi ) = F(µi , Yi , Tf i , tf i , Hi , hi , Vp,i , Ri , Yi , Wi )
for stand i = 1, . . . , 5, where µi is a coefficient of friction,
Tf i and tf i are the tension forces at the entry and exit of
the roll gap, respectively, Hi and hi are the strip thickness
at the entry and exit of the roll gap, respectively, Vp,i is the
roll speed, Ri is the work roll radius, Yi is the yield stress
8546
Preprints of the 18th IFAC World Congress
Milano (Italy) August 28 - September 2, 2011
and Wi the strip width of the ith stand 1 . The function
F represents the deformation model and outputs the total
roll force Pi and the slip fi . The details are omitted and
the reader is referred to Bryant and Osborn (1973) for a
similar (more simplified) model.
The deformability of the mill roll stack is modelled as
a single stiffness, denoted by the Mill Modulus Mi , i =
1, . . . , 5. This implies that the exit strip thicknesses hi and
the positions of the gap actuators Si are determined by
Pi
Si = hi −
i = 1, . . . , 5
Mi
The tension force tf i depends on the speed difference
between the exit of a stand and the entry of the next
stand 2
Z t
E
tf i (t) = hi (t)W (t)
(Vi+1 (τ ) − vi ( τ ))dτ
(1)
0 Li
for stands i = 1, . . . , 4, where E is the Elasticity Modulus
of steel and Li is the distance between stands i and i +
1, i = 1, . . . , 5. The strip speed and interstand distance
determine the transport delays between the stands 3 . If
the strip speed is constant, the delay is given by 4 :
Li
Hi+1 (t) = hi+1 t +
,
i = 1, 2, 3
(2)
vi
Similarly, gauge measurements located at LGM 1 and LGM 5
after stand 1 and 5 are delayed by
LGM i
,
i = 1, 5
hmeas
(t)
=
h
t
+
i
i
vi
if the speed is constant.
The actuators of the mill consist of the roll speed actuator
and the roll gap position actuators. The roll speed actuator
is an electric motor. The roll gap position actuator is an
electromechanical screw-down spindle motor or hydraulic
capsule cylinder. Both are modelled with the reference
ref
value Vp,i
and Siref as input and the actual roll speed/gap
position as output. The speed actuator is modelled by a
first-order transfer function with time constant τiV :
1
Vp,i (s) = V
V ref (s),
i = 1, . . . , 5
τi s + 1 p,i
The response of the gap actuators is modelled as a firstorder transfer function time constant τig and a rate limiter
1
ref
Si (s) = RL
S
(s),
α
,
i = 1, . . . , 5
i
τig s + 1 i
where RL(·, α) is a rate limiting function with rate limit
α > 0, i.e. y(t) = RL(u(t), αi ) is determined by the
following differential equation
αsign(u(t) − y(t)) if u 6= y
ẏ(t) =
(3)
sign(u̇(t)) min(α, |u̇(t)|) if u(t) = y(t)
1 The width of a single strip is assumed constant throughout the
mill. However, if the strips A and B have different widths, the strip
width is not the same for all stands during the weld passage.
2 The entry tension T of the first stand and the exit tension t are
1
5
considered as disturbances to the model, and are set equal to their
measured responses. Equation (1) is a simplification, since it assumes
that the thickness is constant over the whole interstand length.
3 The entry thickness H of the first stand is considered as distur1
bance to the model, and is set equal to its measured response.
4 If the speed varies, the transport delay model is more complicated
than (2). Although this is included in the model, the expression of
the delay for varying speed is omitted here for brevity.
where sign(·) is the sign function and min(·, ·) is the
minimum of the two arguments.
2.2 Basic control loops
Tension controllers The first three tension controllers
are PI (Proportional-Integral) controllers with a deadband filter with hysteresis:
Z t
ei (τ )dτ, di , i = 1, 2, 3
Sictrl (t) = D Kipr ei (t) + Kiint
0
where
ei (t) = tf i (t) − tref
f i (t),
i = 1, . . . , 4
(4)
tref
fi
is the tension error after stand i,
is the tension
reference, Kipr and Kiint are controller gains and di is the
size of the dead-band. D(·, α) represents the dead-band of
size α > 0:
sign(u)(|u| − α) for |u| ≥ α
D(u, α) =
(5)
0 otherwise
If the tension force error exceeds a certain value, the
overspill tension controller is activated which acts on the
upstream stand. In Section 3 it will be revealed that this
overspill controller is active during the considered weld
passage at the mill.
The strip tension between stands 4 and 5 is controlled by
the speed of the stand 5 motor.
Z t
ctrl
Vp,5
(t) = D Kipr e4 (t) + K4int
e4 (τ )dτ, α
0
where e4 is defined in (4)
Thickness controller FB1 This controller applies a correction to the first stand screw position for a given measured thickness deviation at the exit of stand 1 (hmeas
−
1
−href
1 ). It is a pure integral controller with an integral
gain K FB1 that depends on the variable transport delay
between Stand 1 and Gauge-meter X1.
Z t
S1FB1 (t) = K FB1
hmeas
(τ ) − href
(6)
1
1 (τ )dτ
0
The mill contains a BISRA controller and feedforward
mass flow controller at stand 1, which are included in the
model, but not discussed here for brevity.
Final Thickness controller FB5 This controller calculates the required speed adjustments of stand 1−3 in order
to correct the exit thickness deviation, the measurement
of which is obtained from the gauge-meter after stand 5.
The distribution of the speed correction is given by KiFB5 ,
i = 1, 2, 3.
Z t
ctrl
Vp,i
(t) = KiFB5
hmeas
(τ ) − href
i = 1, 2, 3
5
5 (τ )dτ
0
The controller FB5 contains a Smith predictor, which is
included in the model, but not discussed here for brevity.
2.3 Model validation
Figure 3 shows the measured and simulated response of
a coil, for several relevant variables. The simulated first
stand roll speed and roll force match fairly well with
the measurements. Although there is significant difference
8547
Preprints of the 18th IFAC World Congress
Milano (Italy) August 28 - September 2, 2011
Fig. 3. Measured and simulated response of Vp1 tf 1 , F1
and h5 .
between the measured and simulated tension tf 1 , the
magnitude and timing of the tension peak at t = 10.1s
matches very well. Due to confidentiality reasons, the
numbers at the y-axes are not shown. The simulated exit
gauge hmeas
(bottom Figure 3) matches quite well with the
5
measurement. Since reducing off-gauge and tension peaks
are the most important objectives for the FGC strategy,
the model captures the most important aspects of the weld
transition and is therefore accurate enough to design a
controller for FGC.
Fig. 4. The response of the h5 deviation as result of the
closed-loop simulation of the complete model.
the exit tension force reference (tref
i ) is kept to the setup
value of strip A. The screw position (Si ) shifts at a limited
rate RLi to the setup value of strip B. We denote the
corresponding gap actuator actions by Sisetup , i = 1, . . . , 5.
The total control action on the gaps and speeds is the sum
of the controller and the setup action:
setup
ref
ctrl
Vp,i
(t) = Vp,i
(t) + Vp,i
(t)
i = 1, 2, 3, 5
(7)
for the speeds and
Siref (t) = Sisetup (t) + Sictrl (t)
i = 2, . . . , 5
(8)
for the gaps. For stand 1, the FB1 controller action in (6)
is added:
S1ref (t) = S1setup (t) + S1ctrl (t) + S1FB1 (t)
(9)
3. CURRENT ROLLING FGC PRACTICE
3.1 Setup FGC strategy
The reference values of the strip tensions and the roll
speeds are determined in the so-called setup strategy 5 .
During the weld passage, a transition must be made from
the setup values of strip A to those of strip B. How this is
done is briefly described in this section.
ref
The reference for the roll speed (Vp,i
) is changed several
times during FGC. Every time the weld reaches one stand
ref
i, the roll speed Vp,i
of that stand is kept constant and
ref
the roll speed references of the upstream stands (Vp,k
,
k = 1, . . . , i − 1) are changed. The change consists of a
transition value and the speed trim.
ref
Vp,i
The transition value of
is applied such that the speed
distribution of the upstream stands matches the setup
ref
values of strip B. When the weld passes stand i, Vp,i
is
kept constant and considered as the setup value (for the
mill at weld speed) of strip B, VpiB . The roll speeds of the
upstream stands are then changed accordingly to follow
the speed distribution of the setup values B. We denote the
setup
corresponding roll speed actions by Vp,i
, i = 1, 2, 3, 5.
The speed of stand 4 is kept constant, since it is the pivot
stand.
When the weld passes stand i, the exit thickness reference
(href
i ) is shifted to the setup value of strip B. However,
5 The controller actions are added to these reference values before
they are used by the actuator, as will be described in Equations (7)
and (8).
3.2 Main cause of off-gauge and tension
Off gauge Figure 4 shows the measured strip thickness
deviation at the exit of the mill, h5 , normalized to its
corresponding reference value. Note that, at t = 23[s],
there is a step change in the reference signal since, at that
point of time, the simulated welding point passes stand 5.
The thickness deviation is outside the tolerance limit from
t = 19.3[s] until t = 23.5[s] and after t = 26[s].
The off-gauge at t = 19.3s is due to tension variation of the
downstream stand during weld passage. Further analysis
of the actuator responses shows that the off gauge after
t = 22s is mainly caused by is a large response in the first
stand roll gap S1 and roll speed, Vp1 . The large response
in gap action of stand 1 is due to the setup action S1setup ,
but its slightly incorrect timing with respect to the weld
results in thickness errors at t = 22[s], before the weld has
arrived.
The large Vp1 transition stems from the corresponding
overspill correction of the first interstand tension controller, as discussed in Section 2.2. At t = 10[s], the
first interstand tension force, tf 1 , is too high which is
ctrl
compensated by a large positive Vp1
correction. However,
this increases the mass flow entering stand 2, which leads
to the deviation in the corresponding exit thickness, h2 .
This eventually reaches the last stand and causes the off-
8548
Preprints of the 18th IFAC World Congress
Milano (Italy) August 28 - September 2, 2011
setup
and Sisetup ,
filter for each actuator, before the setups Vp,i
i = 1, . . . , 5 are applied to the mill.
Timing is determined by the weld tracking system, that
detects when the weld passes a stand. Due to the limited
speed of response of the actuators, it is advantageous to
start moving the actuator slightly before the weld passes
the stand, as mentioned in the previous section. Hence we
setup
replace Vp,i
in (7) by
setup
FF
)
i = 1, 2, 3, 5 (10)
(t + tadv,V
Vp,i
(t) = Lτi Vp,i
i
Fig. 5. The response of the 1−2 tension deviation as result
of the closed-loop simulation of the complete model.
gauge part of the strip. This is shown in Figure 4 after
t = 26[s].
Tension deviations
The tension deviations between
stands 1 and 2 are shown in Figure 5. Since the transition
in the strip characteristics from strip A to strip B is
faster than the actuator’s speed of response, the resulting
change in the tension stresses is also significantly faster.
This results in a total tension stress peak which exceeds
the boundary of acceptable variations of ±γtens % 6 . For
this reason, lower tension stress peaks can be obtained by
adjusting the tension level before the weld passes. This
would distribute the tension error over the end of strip A
and the beginning of strip B more evenly. A second cause
is that the responses of the gap actuators and the roll
speeds are not fully synchronized, which can be improved
by better shaping the response of the actuators. It will be
shown in Section 5 that the optimal controller indeed has
these characteristics.
4. OPTIMAL CONTROLLER DESIGN
The controller actions during FGC can be fully optimized,
by parameterizing the speed and gap actions using discretization, by for instance first order hold parameterizations over the considered time frame. To simplify the
optimization problem, and more importantly, to ease the
implementation of the proposed control strategy at the
cold mill, a control structure is chosen that matches as
close as possible the existing controllers at the cold mill,
but having enough freedom to improve the flying gauge
change.
4.1 The decision variables
The timing of the adjustments of the gap and speeds is
crucial to reduce off-gauge and tension variations during
FGC. Furthermore, it is important to synchronize the
feed-forward actions of gap and speed, see also Yamashita
(1987). It is therefore proposed to keep the existing controller structure intact and use a time-shift and low-pass
6 The boundary on tension variations will be motivated in Section
4.2.2. The numerical value of γtens is not revealed due to confidentiality reasons.
where Lτi is a low-pass filter with unit static gain and
is the time shift for stand i.
time constant τi and tadv,V
i
adv,V
may be positive, (resulting in a forward
Note that ti
setup
is
(noncausal) time-shift), since the setup action Vp,i
known before the weld passes the particular stand. Since
stand 4 is the pivot stand, there is no time advance for the
speed action of stand 4.
For the gap actuators we propose a similar time shift tadv,g
i
and a modification of the existing rate limiters within the
setup controller. Sisetup in (8) and (9) is therefore replaced
by
SiFF (t) = RL Sisetup (t + tadv,g
),
RL
i = 1, . . . , 5
i
i
Finding the optimum settings of these time advances tadv,V
i
and tadv,g
,
time
constants
τ
and
rate
limiters
RL
i
i is
i
done through optimization. To this purpose, all these
parameters are collected in a single vector x:
x := xadv , xτ
where
xadv = tadv,V
, tadv,V
, tadv,V
, tadv,V
, tadv,g
, . . . , tadv,g
1
2
3
5
1
5
and
xτ := ( τ1 , τ2 , τ3 , τ5 , RL1 , . . . , RL5 )
In summary, determining the best parameter settings can
be formulated into an optimization problem as presented
in the next section, with the 18 parameters in vector x as
the decision variables.
Remark 4.1 Due to the low-pass filter, the mill speeds are
adjusted more gradually. Manual tuning has revealed that,
in combination of these low pass filters, it is advantageous
to start the transition Vpisetup when the weld passes stand
i. This is earlier than in the existing controller, where the
mill speed of stand i is adjusted when the weld passes
stand i + 1.
4.2 The cost function, J(x)
J(x) expresses a control goal as a function of the parameter
vector, x. As has been explained in Section 1, the control
goal is minimizing two performance criteria, i.e. the offgauge part of the mill’s exit strip and the tension stress
peaks/dips. Hence, the cost function should capture these
two criteria mathematically. The following paragraphs
show the formulation of each criterion which is followed
by the formulation of the total cost function. A time
period that completely contains the Flying gauge change
is considered:
8549
• from t = 0: a few seconds before strip B enters the
first stand
Preprints of the 18th IFAC World Congress
Milano (Italy) August 28 - September 2, 2011
• until t = tN : a few seconds after the weld passes the
last stand .
Amount of the off-gauge part of the strip The amount
of the off-gauge part of the strip is usually described in
term of its length, i.e. off-gauge length. However, there is a
transition in the strip thickness around the welding point.
Hence, the corresponding volume is used instead, since it
better represents the financial costs of the off-gauge part.
The volume of the Off-Gauge part, VOG , is then calculated
as the integral of the product of the exit strip speed, the
thickness and the width:
Z tOG
W5 (x, τ )href
(11)
VOG (x) =
5 (x, τ )v5 (τ )dτ
such that the initial cost (for the initial point x = 0)
equals J(0) = 1 and the contributions of both off-gauge
and tension deviations are 12 .
If we consider the relation between J(x) and x, it is clear
that J(x) is a non-linear function of x. Hence, the optimization problem is a non-linear program. The optimization is conducted with Sequential Quadratic Programming
(SQP)(Hosford and Cadell (2006)) in Matlab 7 . For each
evaluation of the cost function J(x) the model is simulated
in Matlab/Simulink for t ∈ [0, tN ]. This is an off-line
computation; the actual implementation does not require
on-line optimization.
5. RESULTS OF OPTIMAL CONTROLLER DESIGN
τ =0
where tOG is the point in time from where the exit
thickness errors stays within tolerance:
t
(12)
tOG =
min
|h5 (τ )−href
5 (τ )|<(τ )∀τ ∈[t,tN ],
t>0
where (t) is the error tolerance, which may depend on
time, since the tolerance for strip A may differ from that
of strip B. VOG (x) in (11) is a function of the parameters
x as discussed on the previous page.
Amount of the excessive tension stress deviation
The
probability of a strip break or strip pinching becomes
significant when the tension stress is ±γtens % larger or
smaller than the corresponding reference value. Hence,
we are only interested in the tension stress deviations
that are outside the ±γtens % boundary. The tension stress
deviation is therefore formulated as!follows:
tif (x, t)
tdev
− 1, γtens , i = 1, . . . , 5 (13)
f i (x, t) = D
tref
f i (x, t)
5.1 Results of the optimization
First, an improved initial guess xinit has been determined
by common sense. Good initialization of the parameter
set is important, since the optimization routine is a local
search algorithm: there are no guarantees to find the
globally optimum solution. Therefore, an initial guess xinit
has been determined. Based on knowledge and experience
with FGC’s at the cold mill, best guesses for the values
in xinit have been determined. The corresponding initial
guess has a cost function value of J(xinit ) = 0.031. After
optimization, the resulting parameter set x∗ has a cost of
J(x∗ ) = 0.019. The optimal values of x are shown in Table
1, where P denotes a shift of a whole stand, i.e. applying
setup
the speed correction Vp,i
to stand i when the weld passes
stand i (instead of waiting until the weld has passed stand
i + 1), as explained in the remark 4.1.
Table 1. Parameters at the optimal solution x∗ .
where D is the dead-band as defined in (5).
The formulation of the cost of tensions is based on the
following observations:
(1) excessive tension stress deviations in a short time
interval are much worse than small ones in a longer
time interval
(2) the longer the time when the tension stress is outside
the ±γtens % boundary, the higher the risk of a strip
break or a strip pinching
The first postulate is translated by applying a quadratic
function to tdev
f i . The second postulate is translated by
integrating the quadratic function of tdev
f i with respect to
time. The excessive tension stress deviation term of the
cost function is therefore expressed as:
5 Z tN
X
dev
2
Ttot (x) =
tf i (x, t) dt
(14)
i=1
0
The total cost function
The off-gauge term and the
excessive tension stress deviation term are weighted to
their value when the current control system is applied to
the model.
J(x) = wOG VOG (x) + wTens Ttot (x)
1
1
(15)
where wOG = 2VOG (0) and wTens = 2Ttot (0) are weighting
functions for the off-gauge and tension variations respectively. This implies that the weighting functions are chosen
i
RLi [s−1 ]
τi [s]
[s]
tadv,V
i
tadv,g
[s]
5
1
0.99
1.5
0.52 + P
0.08
2
0.95
1.13
0.34 + P
0.23
3
0.26
1.5
0.53 + P
0.72
4
0.23
1.06
5
0.20
1.11
0.20 + P
0.48
5.2 Off-Gauge reduction
The decrease in the cost function value mainly stems from
the decrease in the off-gauge volume term wOG VOG . This
corresponds with the simulated response of the normalized
h5 deviations, which is shown in Figure 6. The responses in
this figure are the results of the complete model simulation
in closed-loop, where the solid grey line is the response
with x = 0 and the dashed line with x = x∗ . Although the
peak of the dashed line at t = 23.5[s] is higher than the
peak of the grey solid line, the resulting off-gauge volume
is much smaller.
The smaller h5 deviation around t = 23[s] is mainly caused
by the smaller tadv,g
value, i.e. the response of the gap
1
of stand one is advanced in time. This optimized setting
leads to a smaller h1 deviation, which eventually results in
a smaller h5 deviation.
7
The cost functional J is a nonsmooth functional of the decision
variables x. SQP uses derivatives of J, which do not exist for every x.
Nevertheless, SQP appeared to work well enough to minimize J and
therefore, a dedicated optimization method for nonsmooth functions
was not used.
8550
Preprints of the 18th IFAC World Congress
Milano (Italy) August 28 - September 2, 2011
5.4 Robustness test
The inherent hardness changes of the incoming strip and
changes in lubrication conditions (due to e.g. temperature
effects and varying oil percentage in emulsion) imply that
the control strategy must be robust to these variations.
Furthermore, the rolling model is not 100% perfect which
also motivates a robustness analysis. The uncertainties
considered are forward slip variation of ±20% for each
stand and variation in the coefficient of friction of strip
B equal to µrobust
= µB + α(µB − µA ), where α ∈ {−2, 2}.
B
The worst-case performance that was obtained using these
bounds is J(x) = 0.35. The responses are therefore still
significantly better than without the new control strategy,
but their figures are omitted for brevity.
6. CONCLUSIONS
Fig. 6. h5 deviation: Original (grey solid) and Optimized
(black dashed).
The design procedure has revealed that by relatively minor
modifications of the existing controller, the amount of offgauge and tension variations is reduced, even if variation
of the friction and slip parameters is taken into account. It
serves as an illustration of optimal controller design based
on an economic objectives, which can have several other
applications in the steel industry.
The optimization routine has come up with the solution
that distributes the tension error more evenly over strips
A and B by anticipating on the tension increase, fully
exploiting the range of acceptable tension variations of
±γtens %. This strategy is useful for strip transitions in
other processes as well, such as continuous annealing and
pickling lines. In the near future the optimized parameters
are to be implemented on the actual mill.
REFERENCES
Fig. 7. Normalized tension stress ts1 deviation: Original
(grey solid) and Optimized (black dashed) .
5.3 Tension deviations
The decrease in the tension stress deviations is illustrated
by Figure 7, which is the normalized ts1 deviation. Observe
that the peak of the dashed line at t = 10[s] is significantly
lower than the solid line. The peaks of the tension stress
deviations of the other stands (not shown) are also significantly lower. The lower peaks lead to the lower value of
the excessive tension stress deviation term.
The main cause of the improvement in tension response
is that the gap action of stand 2, S2setup is earlier than in
the original controller configuration. This brings ts1 to a
lower value, before it is increased by the strip characteristic
transitions as the weld passes stand 2. Given that the
transition in Vp2 also increases ts1 , by shifting its starting
time the ts1 peak becomes lower. The new strategy lowers
the tension level before the weld arrives, i.e. at t = 9[s]
in Figure 7. This shows that the new strategy distributes
the tension error more evenly over strips A and B by
anticipating on the tension increase at t = 10[s], fully
exploiting the range of acceptable tension variations of
±γtens %.
Bryant, G. F. and Osborn, R. (1973) In Automation of
tandem mills. G. F. Bryant (ed.), London: The Iron and
Steel Institute.
Hosford, W.F. and Cadell, R.M. (2006) Chapter 5 Constraints in Nonlinear Optimization. Optimization in
Systems and Control., Delft: Delft University of Technology.
Yamashita, M., Yarita, I., Abe, H., Mikuriya, T., Yanagishima, F. (1987) Technologies of flying gauge change
in fully continuous cold rolling mill for thin gauge steel
strips. 4th International Steel Rolling Conference-the
Science and Technology of Flat Rolling, 2(E.36), 1-11,
Wang, J. S., Jiang, Z. Y., Tieu, A. K., Liu, X. H., Wang, G.
D. (2007) A flying gauge change model in tandem cold
strip mill. Journal of Material Processing Technology
Pittner, J. and Simaan, M. A. (2007) A Novel Approach
for Optimal Control of Continuous Tandem Cold Metal
Rolling. IEEE IAS 2007 Conference Record of the 42nd
Annual Meeting, 374-381.
Kijima, H., Kenmochi, K., Yarita, I., Sunamori, Y.,
Fukuhara, A., Miyahara, M. (1998) Improvement of
the accuracy in thickness during flying gauge change
in tandem cold mills. Revue de Metallurgie-Cahiers
d’Informations Techniques 95(7-8): 911-918.
V.B. Ginzburg and R. Ballas (1993) High-quality steel
rolling: theory and practice
Orowan E. (1943) The Calculation of Roll Pressure in
Hot and Cold Flat Rolling. Proceedings Institute of
Mechanical Engineers, Vol. 150, 140-167.
8551