Print this article
advertisement

Mirza Abdulla, et al International Journal of Computer and Electronics Research [Volume 5, Issue 3, June 2016]
An O(n^(4/3)) Worst Case Time
Selection Sort Algorithm
Mirza Abdulla
Computer Science Department, AMA international University, Bahrain
mirza999@hotmail.com
Abstract─ Sorting is one of the most important and
fundamental problems in Computer Science. Techniques like
Insertion sort, selection, or bubble sort were seen as inefficient due
to their 𝑶(𝒏𝟐 ) worst case time complexity. However, this didn’t
prevent researchers from attempting to improve these bounds.
Shell sort was an improvement over Insertion sort. We present a
modified selection sort technique that runs in 𝑶(𝒏𝟒/𝟑 ) in the
worst case. Thus we obtain an asymptotic improvement of a factor
of 𝑶(𝒏𝟐/𝟑 ) over the classical selection sort technique worst case
running time.
Keywords: Selection sort; time complexity; O notation
1. INTRODUCTION
Ever since the construction of modern day computer, the
problems of sorting and searching were fundamental to the
solution of most problems. This stems from the fact we need to
access data as fast possible, and some arrangements or
permutations of data can improve the access time substantially.
Indeed, sorting amounts to about half the processing and data
manipulations performed I commercial applications.
Sorting is a permutation of data. More formally, given a set of
n elements 𝑎1 , 𝑎2 , 𝑎3 , … . , 𝑎𝑛 , we need to permute the set
into 𝑎𝜋(1) , 𝑎𝜋(2) , 𝑎𝜋(3) , … . , 𝑎𝜋(𝑛) . Usually, we want to reorder
the data into ascending or descending sequence. In this case we
have𝑎𝜋(𝑖) ≤ 𝑎𝜋(𝑗) ,for 𝑖 < 𝑗, when the ordering is to be
ascending, and 𝑎𝜋(𝑖) ≥ 𝑎𝜋(𝑗) when the ordering is to be
descending. In comparing sorting algorithms we may also
seek other criteria to be satisfied. Some of the criteria that are
usually considered when comparing sorting algorithms are:
Time efficiency of the sorting technique. There are
different measures of time. These include best,
average and worst case asymptotic performance.
Space efficiency of the sorting technique.
Number of comparisons made.
Number of data movements made
Stability of the sort technique.
Some of the most well known sorting techniques include
bubble, Insertion, and Selection sort. These sort techniques
share two common criteria among them: simplicity of coding,
make about n passes over data, gross inefficiency in running
©http://ijcer.org
e- ISSN: 2278-5795
time, and a good introduction to sorting at introductory
programming level courses. The behavior of these techniques
on some other properties is presented in Table 1.
Table 1:.Properties
Sort Properties
Selection
Insertion
Bubble
Not stable
Stable
Stable
O(1)
O(1)
O(1)
extra space
extra space
extra space
Θ(n2)
O(n2)
O(n2)
comparisons
comparisons
comparisons
Θ(n) swaps
O(n2) swaps
O(n2) swaps
Not adaptive
Adaptive:
Adaptive:
O(n)
time O(n)
when
when nearly nearly sorted
sorted
In this paper we seek to convert such grossly inefficient
sorting techniques to more efficient ones by identifying areas of
inefficiency and attempt to do away with unduly repetitive
tasks, with focus on the Selection sort technique.
Enhancements to Selection sort technique appear in the
literature. For example, [1] consider improving the data
movement in the selection sort process.
The asymptotic
performances remains as bad as it was before, however, in the
best case less data movements are made. Along the same lines
[2] make some improvements to data movement thus reducing
the running time of selection sort to some extent but with no
effect on the asymptotic time performance and the expense of
extra space. Other work such as that of [3-5] don’t make any
asymptotic time improvement in the running time of the sorting
algorithm. On the other hand [9] makes a substantial worst
case improvement by marrying the ideas of insertion sort and
selection sort to get an 𝑂(𝑛√𝑛) worst case running time sorting
technique. [11] improves that idea even further to make it
apply to just selection sort without scarifying the running time
of 𝑂(𝑛√𝑛)or the use of 𝑂(1) extra space.
In this paper, we present an improved worst case running
time selection algorithm. We prove that it is substantially
better and with 𝑂(𝑛2/3 ) factor of time improvement than the
classical Selection sort technique. Section 2 gives a brief
p- ISSN: 2320-9348
Page 36
Mirza Abdulla, et al International Journal of Computer and Electronics Research [Volume 5, Issue 3, June 2016]
background of the improvement to the classical Selection sort
obtained by [11] and worst case running time analysis. In
section 3 we present the concept of Improved Selection Sort
(ISS) and the pseudo code as well as the theoretical time
analysis of the algorithm.
2.
contains the minimum element of the block.
However, when any of the other elements in the
current block becomes the current element
block, it may not have the minimum of the
block in that position initially, and therefore, a
search over that block is needed.
WORST CASE SELECTION SORT ALGORITHM
𝑶(𝒏. √𝒏)Worst case time Selection Sort algorithm.
In selection sort we have two partitions: one sorted and the
other unsorted. Initially the sorted list is empty, and all the
elements are in the unsorted lists. For an unsorted list that
initially has n items, n-1 iterations are made on the list where
each time the minimum is found and swapped with the first
element in the list. Thus increasing the sorted list by and
similarly decreasing the unsorted list by one. Unfortunately,
and despite its simplicity, this technique requires an overall of
𝑂(𝑛2 ) operations in the best-average-worst case. However,
[11] showed that the use of blocks can significantly improve
the time for the selection of the minimum element of the
unsorted list during each iteration of Selection sort algorithm.
The idea is to treat the array of 𝑛 elements to be composed of
2
2
√𝑛 consecutive blocks each of size √𝑛 elements, which were
referred to as level 0 or 𝐿0 blocks.The method used to achieve
this improvement required that we always keep the minimum of
a block in the first location of that block.During each iteration
we only search thru the unsorted list but only the items of the
block to which the current item belongs to, and the first element
of the other blocks in the unsorted list.The minimum item
found is thus the minimum of the unsorted list and therefore is
swapped with the current item. After the swap is made the
block from which the minimum was found may now not
contain in its first position the minimum of that block and
therefore another search for the minimum of the block is
conducted, and the minimum found then is swapped with the
first item of that block. Such an action guarantees that all right
blocks contain the minimum of their elements in the first
position prior to the start of each iteration of the improved
selection sort algorithm.
𝟐
The 𝑶(𝒏 √𝒏) time algorithm
Step0 find the minimum element in each block and
interchanges it with the first element in that
block.This step is to make sure that prior to step 1 all
the blocks in the array would contain the minimum of
that block in the first position of the block.
Step1 iterate over steps 2 to 6 until the whole array is
sorted. Thisis the main loop in the selection sort
algorithm.
Step 2find the minimum element in the current
block. Note that first position of a block
©http://ijcer.org
e- ISSN: 2278-5795
Step3 find the minimum element in the entire
unsorted list. The loop need only inspect the
first element in each block of the unsorted list
so far to compare it with the minimum.
Step4 find the number of the block where the
minimum of the unsorted list was found.
This value can be easily obtained by dividing
the location by the size of a block. The quotient
may be incremented by one if the number of the
block is to start from 1.
Step 5 we have the location of the minimum element
of the entire unsorted list and therefore, we
can swap it with the current element.
Step 6 find and put the minimum of the block where
the minimum of the entire unsorted elements
was found (step 4) in the first position of that
block. This operations is needed since the
minimum of the entire unsorted list was
swapped with the current element, the block
which contained that element before the swap
may not have the minimum of the block in the
first position. Therefore, we may need to find
the minimum of the block and interchange it
with the first element of the block.
[11]Proved that each of the steps from 2 to 6 can be
2
performed in 𝑂( √𝑛) time. step 1 iterates over the entire list of
2
size n, and hence steps 1 to 6 can be performed in 𝑂(𝑛 √𝑛)
time. step 0 can be performed in 𝑂(𝑛) time. Therefore, the
2
entire algorithm can be performed in 𝑂(𝑛 √𝑛) time in the worst
case.
3. IMPROVED SELECTION SORT
The introduction of the idea of 𝐿0 blocks in [11] led tothe
2
better bound of 𝑂(𝑛 √𝑛)in selection sort. Such an idea may not
be improved by increasing the number of blocks or the size of a
block. However, the technique can be enhanced further by
introducing another level of blocks: the 𝐿1 blocks.
Definition: given an array, A[1..n], holding n elements,
1.
We assume that the sorted list is built starting from
lower indexed items going towards the higher indexed
items. We will refer to the higher indexed elements as
p- ISSN: 2320-9348
Page 37
Mirza Abdulla, et al International Journal of Computer and Electronics Research [Volume 5, Issue 3, June 2016]
2.
3.
4.
5.
6.
7.
appearing to the right of the lower indexed elements of
the array.
We shall refer to all consecutive locations in the array
of length 𝒖 = ⌊𝑛1/3 ⌋starting from location𝒏 − 𝒖𝟑 +
𝟏as the level 0 (or 𝐿0 ) block. Thus we have 𝒖𝟑 such
blocks. Moreover, all 𝐿0 blocks start after the
locations 1 to 𝑛 − 𝒖𝟑 in the input array. In other words
the blocks are right aligned in the array, when the
lower indexed elements start from the left.
Locations 1 to 𝑛 − 𝒖𝟑 mayconstitute a 𝐿0 block of
length less than 𝒖, which we shall refer to as partial 𝐿0
block
(or
𝑃0
block).
We shall refer to all consecutive locations in the array
of length 𝒗 = 𝑢2 starting from location 𝑛 − 𝒗𝟑 as the
level 1 (or 𝐿1 ) block. Thus each 𝐿1 block contains
𝒖of𝐿0 blocks, and there are𝒖 such𝐿1 blocks.
A block (𝐿0 or 𝐿1 ) that has the minimum of that
respective block in the first position of the block is
called block rule compliant.
The first element after all the elements of the sorted
lists in the selection sort algorithm, or the leftmost
element of the unsorted list is referred to as the
currentelement and the𝐿0 or𝐿1 block to which it
belongs is called the current𝐿0 or
𝐿1 block
respectively.
All elements in the current 𝐿0 or 𝐿1 block but not yet
in the sorted list are referred to as rightelements to the
current element. All 𝐿1 blocks to the right of the
current element but in the same 𝐿0 block are referred
to as right𝐿1 blocks. All 𝐿0 blocks to the right of the
current block are referred to as right𝐿0 blocks.
The index of the minimum of the unsorted list is
referred to as the minIndex, and the block in which
the minimum resided is referred to as the min block.
Therefore, the𝐿0 or𝐿1 block to which min item
belongs is called the min𝐿0 or 𝐿1 block respectively.
𝑃0 = 𝑃1 𝑚𝑜𝑑𝑛1/3
//size of partial 𝐿0 block
0. for i = 1+𝑃1 to n step 𝐿1 { //make all 𝐿1 blocks
contain min in 1st position
min = i;
forj = i to 𝒊 + 𝐿1 − 1
if a[j] < a[min] then j=min;
swap a[i] and a[j];
}
fori = 1+𝑃0 to n step 𝐿0 { //make all 𝐿0 blocks
contain min in 1st position
min = i;
forj = i to 𝒊 + 𝐿0 − 1
if a[j] < a[min] then j=min;
swap a[i] and a[j];
}
1. for i = 1 to n
{
2. ifi< = 𝑃0 then 𝑆0 = 1 + 𝑃0
//location of next
𝐿0 block to the right.
else𝑆0 = 1 + ⌈
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
17.
Improved Algorithm:
𝑃1 = 𝑛𝑚𝑜𝑑𝑛2/3
partial 𝐿1 block
©http://ijcer.org
𝐿0 = 𝑛1/3
𝐿1 = 𝑛2/3
//size
of
e- ISSN: 2278-5795
𝐿0
⌉ ∗ 𝐿0 + 𝑃1
ifi< = 𝑃1 then 𝑆1 = 1 + 𝑃1
𝐿1 block to the right.
else𝑆1 = 1 + ⌈
15.
16.
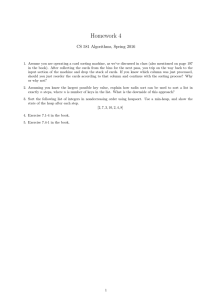
Figure 1: Level 1 blocks contain level 0 blocks which contain
the elements of the array.
(𝑖−𝑃1)
18.
19.
20.
21.
22.
23.
24.
//location of next
(𝑖−𝑃1)
𝐿1
⌉ ∗ 𝐿1 + 𝑃1
min= i
for j=1+ i to 𝑆0 − 1
if a[j] <min then
min = j;
for j=𝑆0 to 𝑆1 − 1 step 𝐿0
if a[j] <min then
min = j;
for j=𝑆1 to 𝑛 step 𝐿1
if a[j] <min then
min = j;
if i ≠ min then swap a[i] and a[min];
else{ if 𝑆0 <min<𝑆1 then {
// min is in one of
𝐿0 blocks in current 𝐿1 block
min1 = min;
for j=minto 𝑆0 − 1 if a[j] <min1 then min1 =
j;
if min1≠ min then swap a[min1] and a[min];
}
If min ≥ 𝑆1 then
// min is in one of
𝐿1 to the right of current block
min1 = min;
for j=minto min +𝐿0 − 1
if
a[j]
<min1 then min1 = j;
for j=min +𝐿0 to min +𝐿1 − 1 step 𝐿0
if a[j] <min1 then min1 = j;
if min1≠ min then
swap a[min1] and a[min];
If min1>min+𝐿0 − 1then {
min2 = min1;
for j= min2 to min2 +𝐿0 − 1 if a[j] <min2 then
min2 = j;
swap a[min1] and a[min2];
}
p- ISSN: 2320-9348
Page 38
Mirza Abdulla, et al International Journal of Computer and Electronics Research [Volume 5, Issue 3, June 2016]
25.
make that 𝐿0 block rule compliant.
This action is performed in these
steps.
}
Explanation of the pseudo code:
Variables: 𝑳𝟎 is the size of 𝐿0 block, 𝑳𝟏 is the size of
𝐿1 block, 𝑷𝟎 is the size of partial 𝐿0 block, and 𝑷𝟏 is
the size of partial 𝐿1 block
Step 0: This step is necessary to make the array block
rule compliant. The idea is to repeat thru the array in
steps equal to the size of 𝐿1 find the minimum in each
block and swap it with the first location of that block.
We repeat again thru the array in steps equal to the
size of 𝐿0 by finding the minimum in each such block
and swap it with the first location of that block.
Step 1: We iterate thru the unsorted list, and each
time:
o Steps 2 and 3: The location of the first 𝐿0
block to the right of the current item (𝑆0 ), and
the location of the first 𝐿1 block to the right
of the current item (𝐿1 ), are found.
o Steps 4 and 5: The minimum of the current
partial𝐿0 block is found.
o Step 6: The minimum of the current partial
𝐿0 block is found, and becomes the minimum
so far
o Step 7: The minimum of the right 𝐿1 blocks
is found and becomes the minimum.
o Step 8: if the current item is not the
minimum of the unsorted list the minimum
found is swapped with the current item. This
way the minimum is found and is added to
the sorted list.
o Step 9: if the location of the minimum was
in the current partial 𝐿1 block but not in the
current partial 𝐿0 block, then the 𝐿0 block
from which it was obtained may not be min
block compliant. So
Steps 10 and 11: The minimum of
that 𝐿0 block is found, and
Step 12: we swap the first item of
that 𝐿0 block with the minimum of
that block.
o Step 14: on the other hand if the minimum
of the unsorted list was obtained from an 𝐿1
block to the right of the current 𝐿1 block:
Steps 15and 16: Find the minimum
of the first 𝐿0 block in that 𝐿1
block, and
Step 17: Find the minimum of the
remaining 𝐿0 blocks in that 𝐿1
block.
Steps 18 and 19: the minimum
found in step 17 is the minimum of
the 𝐿1 and is swapped with the first
item in that 𝐿1 block.
Steps 20 and 23: if the minimum
found in step 17 was obtained from
a block other than the first 𝐿0 block
in that 𝐿1 block, we would have to
©http://ijcer.org
e- ISSN: 2278-5795
Correctness of algorithm
Proposition 1. The first element in a 𝐿1 block is also the first
element in the first 𝐿0 block within the 𝐿1 block, and it is the
minimum of both blocks.
Proof. Follows form the definition of the blocks.
Proposition 2. The minimum element of the unsorted list
prior to any iteration in step 1 of the algorithm is one of the
elements of the unsorted part of the current partial𝐿0 block, the
right 𝐿0 blocks in the current 𝐿1 block and the right 𝐿1 blocks.
Proof. The minimum element of the unsorted list prior to any
iteration in step 1of the algorithm is one of the elements of the
unsorted part of the current 𝐿1 block and the right 𝐿1 blocks
.However, the first position of the current 𝐿1 block may have
already been inspected and added to the sorted list. It follows
therefore that it should not be considered in the search of the
minimum of the unsorted list. Nevertheless, each of the 𝐿0
right blocks in the current partial𝐿1 block contains the
minimum of the block in its first position. Therefore, these
blocks and the not yet sorted elements in the current partial𝐿0
block must have between them the minimum of unsorted
elements in the current partial𝐿1 block. This minimum can be
compared with the minimum of the right 𝐿1 blocks to obtain
the overall minimum of the unsorted list.
It follows therefore that when a swap is made between the
minimum element in the unsorted list and the current item, the
current position will contain the minimum of the unsorted list
and the swapped item may be in either
1.
2.
3.
the current partial𝐿0 block, or
the first position in one of the right 𝐿0 blocks within
the current 𝐿1 block or
The first position in one of the right 𝐿1 blocks.
In the first case, no violation to our restriction of having the
first element of a block having the minimum of that block,
since now the first position of the block already contains the
minimum of the block.
In the second and third cases, we have a violation of the first
position containing the min of a block rule and it needs to be
dealt with. Dealing with the second case all that needs to be
performed is finding the minimum of the block and swap it
with item in the first position, after of which the min rule is
maintained for the entire array.
Similarly, for the third case we find the minimum of all the
elements in the 𝐿1 block where the swapped item was moved
to, and the min of all the right 𝐿1 blocks to that block with their
p- ISSN: 2320-9348
Page 39
Mirza Abdulla, et al International Journal of Computer and Electronics Research [Volume 5, Issue 3, June 2016]
𝐿0 block. Again the min rule is maintained after this operation,
and this is exactly what steps 7 to 16 of the algorithm perform.
Therefore, we have:
Proposition3. At the end of each iteration, and prior to the
start of a new iteration, the current position contains the
minimum of the unsorted list and the min rule is maintained.
Lemma 1. The algorithm correctly sorts the entire list.
Proof. Prior to the start of the main loop of the algorithm a
scan is made over the entire array of elements to make sure that
the min rule is maintained. The algorithm iterates over all
elements of the array and by proposition 5, each time finds the
minimum and places it in the current position as well as make
sure that the min rule is maintained prior to the start of a new
iteration.
Time Complexity Analysis of algorithm.
In step 0, and prior to the start of the main loop of the algorithm
a scan is made on the array to block rule compliant. The scan is
performed in 𝐿(𝐿) time.
Step 1 is repeated n times , and during each pass:
Steps 2 to 4 take 𝐿(1) or constant time
Step 5 is repeated for the remainder of the current 𝐿0
and thus performs 𝐿(|𝐿0 |) operations at the
most.
Step 6 is repeated a maximum of 𝐿(|𝐿0 |) since there
are a maximum of that many 𝐿0 blocks in
any 𝐿1 block.
Step 7 is repeated a maximum of 𝐿(|𝐿0 |) since the
number of 𝐿1 blocks in the array is |𝐿0 |.
Steps 8 to 10 require 𝐿(1) or constant time.
Step 11 can be performed in at most 𝐿(|𝐿0 |) time
since the loop makes that many iterations
Steps 12 to 15 require 𝐿(1) or constant time.
Step 16 can be performed in at most 𝐿(|𝐿0 |) time
since the loop makes that many iterations
Step 17 is repeated a maximum of 𝐿(|𝐿0 |) since there
are a maximum of that many 𝐿0 blocks in
any 𝐿1 block.
Steps 18 to 21 require 𝐿(1) or constant time.
Steps 22 can be performed in at most 𝐿(|𝐿0 |) time
since the loop makes that many iterations
Step 23 requires 𝐿(1) or constant time.
It follows, therefore, that the body of the main loop performs
𝐿(|𝐿0 |) at the most, from which it follows that the improved
selection sort algorithm runs in 𝐿(𝐿|𝐿0 |) = 𝐿(𝐿. 𝐿1/3 ) time
in the worst case.
1
Theorem 1. The ISS2 algorithm runs in 𝐿(𝐿. 𝐿3 ) time.
4.
CONCLUSIONS
1
In this paper we presented an𝐿(𝐿. 𝐿3 ) worst case running
1
time selection sort variant, which is an improvement of 𝐿(𝐿3 )
factor on the classical selection sort technique.
This
substantial in the asymptotic performance improvement of
©http://ijcer.org
e- ISSN: 2278-5795
selection sort was obtained by restricting the search of the
minimum item in each pass of the sort to a small subset of the
unsorted list. Thus we avoid making unnecessary comparisons
to most of the elements in the unsorted list.
REFERENCES
[1] JehadAlnihoud and Rami Mansi, An Enhancement of Major
Sorting Algorithms, The International Arab Journal of
Information Technology, Vol. 7, No. 1, January 2010, pp.
55-62.
[2] Md. Khairullah, Enhancing Worst Sorting Algorithms,
International Journal of Advanced Science and Technology
Vol. 56, July, 2013, pp.13-26.
[3] Muhammad Farooq Umar, EhsanUllahMunir, Shafqat Ali
Shad and Muhammad WasifNisar, Enhancement of
Selection, Bubble and Insertion Sorting Algorithm, Research
Journal of Applied Sciences, Engineering and Technology
8(2): 263-271, 2014, Published: July 10, 2014, ISSN: 20407459; e-ISSN: 2040-7467.
[4] Ankit R. Chadha, RishikeshMisal, TanayaMokashi,
AmanChadha, ARC Sort: Enhanced and Time Efficient
Sorting Algorithm, International Journal of Applied
Information Systems (IJAIS) – ISSN : 2249-0868,
Foundation of Computer Science FCS, New York, USA,
Volume 7– No. 2, April 2014 – www.ijais.org
[5] JyotiDua, Enhanced Bidirectional Selection Sort,
International Journal of Computer, Electrical, Automation,
Control and Information Engineering Vol:8, No:7, 2014
[6] Md. Khairullah, An Enhanced Selection Sort Algorithm,
SUST Journal of Science and Technology, Vol. 21, No. 1,
2014; P:9-15
[7] SurenderLakra , Divya, Improving the performance of
selection sort using a modified double-ended selection
sorting, International Journal of Application or Innovation in
Engineering & Management (IJAIEM), Web Site:
www.ijaiem.org
Email:
editor@ijaiem.org,
editorijaiem@gmail.com Volume 2, Issue 5, May 2013
ISSN 2319 – 4847.
[8] Mrs.P.Sumathi, Mr.V.V.Karthikeyan, A New Approach for
Selection Sorting, International Journal of Advanced
Research in Computer Engineering & Technology
(IJARCET) Volume 2, Issue 10, October 2013.
[9] Mirza Abdulla, Marrying Inefficient SortingTechniques Can
Give Birth to aSubstantially More Efficient Algorithm,
International Journal of Computer Science and Mobile
Applications, Vol.3 Issue. 12, December- 2015, pg. 15-21.
[10] Mirza Abdulla, Optimal Time and Space Sorting Algorithm
on Hierarchical Memory with Block Transfer, International
Journal of Electrical & Computer Sciences IJECS-IJENS
Vol:16 No:01, Feb-2016, Pg. 10-13.
[11] Mirza Abdulla,Selection Sort with improved asymptotic
time bounds, The International Journal of Engineering and
Science (THE IJES), To Appear May-2016.
[12] Knuth, D., "The Art of Computer programming Sorting and
Searching", 2nd edition, vol.3. Addison- Wesley, 1998.
p- ISSN: 2320-9348
Page 40
Mirza Abdulla, et al International Journal of Computer and Electronics Research [Volume 5, Issue 3, June 2016]
[13] J. L. Bentley and R. Sedgewick, 1997, "Fast Algorithms for
Sorting and Searching Strings", ACM-SIAM SODA
‟97,360-369.
[14] T. H. Cormen, C. E. Leiserson, R. L. Rivest, and C. Stein,
2001,."Introduction
to
Algorithms".MIT
Press,
Cambridge,MA, 2nd edition.
[15] Flores, I., Jan 1961, "Analysis of Internal Computer
Sorting". J.ACM 8, 41-80.
©http://ijcer.org
e- ISSN: 2278-5795
[16] V.Estivill-Castro and D.Wood, 1992,"A Survey of Adaptive
Sorting Algorithms", Computing Surveys, 24:441-476.
[17] Cocktail Sort Algorithm or Shaker Sort Algorithm,
http://www.codingunit.com/cocktail-sort-algorithm-orshaker-sortalgorithm.
p- ISSN: 2320-9348
Page 41