Lecture 11 Electrostatic Actuators II: complete
advertisement

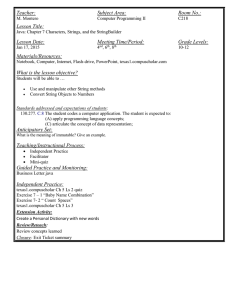
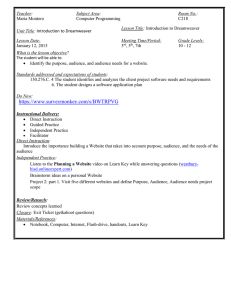
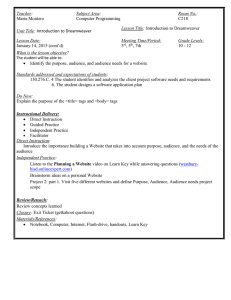
EE C245 - ME C218 Introduction to MEMS Design Fall 2003 Roger Howe and Thara Srinivasan Lecture 11 Electrostatic Actuators II EE C245 – ME C218 Fall 2003 Lecture 11 Today’s Lecture • • • • Linear (vs. displacement) electrostatic actuation: vary overlap area: electrostatic comb drive Electrostatic springs: positive (comb levitation) Second-order effects in electrostatic actuators: charged dielectrics, work functions, depletion, and Casimir Reading: 1. W. C. Tang, M. G. Lim, and R. T. Howe, “Electrostatic comb drive levitation and control method,” Journal of Microelectromechanical Systems, 1, 170-178 (1992). 2. B. D. Jensen, S. Mutlu, S. Miller, K. Kurabayashi, and J. J. Allen, “Shaped comb fingers for tailored electromechanical restoring force,” Journal of Microelectromechanical Systems, 12, 373-383 (2003). 3. Kudrle, T. D., et al, “Pull-in suppression and torque magnification in parallel plate electrostatic actuators with side electrodes,” 12th Int. Conf. on Solid-State Sensors, Actuators, and Microsystems (Transducers ’03), Boston, Mass., June 8-12, 2003, pp. 360-363. EE C245 – ME C218 Fall 2003 Lecture 11 2 Interdigitated Comb Drive Common bias: DC offset VP connected to shuttle through poly0 “ground plane” William Tang, Ph.D. EECS Dept., 1990 (this device by Clark Nguyen, Ph.D. 1994) EE C245 – ME C218 Fall 2003 Lecture 11 3 Electrostatic Force: a First Pass* t g stator (fixed electrode) rotor (not … but moving) gap = g, thickness = t L = finger length x = overlap length L x W. C. Tang, Ph.D. EECS Dept., 1990 EE C245 – ME C218 Fall 2003 Lecture 11 4 First-Pass Electrostatic Force (Cont.) • Neglect fringing fields • Parallel-plate capacitance between stator and rotor Vrs Vrs ⎛ ε xt ⎞ ε xt ⎞ 2 1⎛ W ′( x,Vrs ) = ∫ q( x,V ′)dV ′ = ∫ ⎜⎜ 2 N o ⎟⎟V ′dV ′ = ⎜⎜ 2 N o ⎟⎟Vrs 2⎝ g ⎠ g ⎠ 0 0⎝ Fe = ε t⎞ ∂W ′ 1 2 dCrs 1 2 ⎛ = Vrs = Vrs ⎜⎜ 2 N o ⎟⎟ 2 2 ∂x dx g ⎠ ⎝ independent of x! • Have we forgotten anything? The substrate! EE C245 – ME C218 Fall 2003 Lecture 11 5 Comb Drive Force: a Second Pass • Energy must include capacitance between the stator and rotor and the underlying ground plane, which is typically biased at the stator voltage Vs … why? t g L zo x + - EE C245 – ME C218 Fall 2003 Lecture 11 Vs + - Vr 6 Comb-Drive Force with Ground Plane Correction • Finger displacement changes capacitances from stator and rotor to the ground plane modifies the electrostatic energy Fe , x = ∂W ′ 1 dCsp 2 1 dCrp 2 1 dCrs = Vs + Vr + (Vs − Vr )2 ∂x 2 dx 2 dx 2 dx Gary Fedder, Ph.D., pp. 119-122, 1994 EE C245 – ME C218 Fall 2003 Lecture 11 7 Capacitance Expressions • Consider case where Vr = Vp = 0 V • Csp depends on whether or not fingers are engaged ′ ,u ( L − x)] Csp = N [Csp′ ,e x + Csp Crs = NCrs′ x EE C245 – ME C218 Fall 2003 Lecture 11 Gary Fedder, Ph.D., pp. 119-122, 1994 8 Simulation (2D Finite Element) Fe , x = N 2 (C rs′ + Csp′ ,e − Csp′ ,u )Vs 2 20-40% reduction of Fe EE C245 – ME C218 Fall 2003 Lecture 11 Gary Fedder, Ph.D., p. 123, 1994 9 Vertical Force (Levitation) Fe , z = ∂W ′ 1 dCsp 2 1 dCrp 2 1 dCrs (Vs − Vr )2 Vs + = Vr + 2 dz 2 dz 2 dz ∂z Consider Vr = 0 V as shown: Fe, z = EE C245 – ME C218 Fall 2003 Lecture 11 1 ⎡ d (Csp′ ,e + C rs′ )⎤ 2 Nx ⎥Vs 2 ⎢⎣ dz ⎦ W. C. Tang, JMEMS, 1992 (reader) 10 Levitation Force “electrical spring const.” Fe, z ≅ k e (Δze − Δz ) constant Levitation force adds to the mechanical spring constant in the z direction increases the resonant frequency EE C245 – ME C218 Fall 2003 Lecture 11 Gary Fedder, Ph.D., p. 122, 1994 11 Vertical Resonant Frequency Must account for electrical springs in finding MEMS resonant frequencies comb (x-axis) ke = 0 comb (z-axis) ke > 0 parallel plate ke < 0 EE C245 – ME C218 Fall 2003 Lecture 11 W. C. Tang, JMEMS, 1992 (reader) 12 Relative Forces for Surface Microstructures x Comb drive (x-direction) y Vr = 0 V L x V1 (V1 = V2 = Vs = 1V) Fe ,x = ε ot 2 Vs g Differential || plate (y-direction) V2 gap = g = 1 μm, thickness = t = 2 μm finger length = L =100 μm overlap length x = 75 μm (V1 = 0 V, V2 = 1V) Fe , y = Fe, y Fe , x 1 ε o tx 2 V2 2 g2 ε otx 2 V2 2 1 x g = = 2ε ot 2 2 g Vs g || plate wins big … for surface MEMS EE C245 – ME C218 Fall 2003 Lecture 11 13 Levitation Suppression Pattern Poly0 into differentially biased electrodes to minimize field lines terminating on top of comb Penalty: x-axis force is reduced EE C245 – ME C218 Fall 2003 Lecture 11 W. C. Tang, JMEMS, 1992 (reader) 14 Experimental Measurements Shuttle is pulled down (toward the substrate) with zero applied voltage Why? EE C245 – ME C218 Fall 2003 Lecture 11 W. C. Tang, JMEMS, 1992 (reader) 15 Charged Dielectrics: No Applied Voltage Needed! Minimize exposed dielectrics! Nitride charge inferred from deflection and simulated field distribution is consistent with typical values EE C245 – ME C218 Fall 2003 Lecture 11 W. C. Tang, JMEMS, 1992 (reader) 16 Work Function Differences Example: p+ structure over n+ poly0 electrode z p+ poly-Si -------------------n+ poly-Si ++++++++++++++++++++ Equilibrium band diagram p+ poly-Si EF n+ poly-Si How is charge exchanged to reach equilibrium? Answer: mobile charge on dielectric z surfaces EE C245 – ME C218 Fall 2003 Lecture 11 17 Depletion Effects in Silicon ρ(x) Q = +qN X d d n type silicon (SOI structure) -------------------- ++++++++++++++++++++ depletion region +qNd g x -Xd x -Q E(x) Eair=(εSi / εo)ESi -Xd + - V Q = f(V) EE C245 – ME C218 Fall 2003 Lecture 11 g x Nonlinear charge-storage affects electrostatic force 18