NUMERICAL SOLUTION VIA LAPLACE TRANSFORMS OF A
advertisement

NUMERICAL SOLUTION VIA LAPLACE
TRANSFORMS OF A FRACTIONAL ORDER
EVOLUTION EQUATION
WILLIAM MCLEAN AND VIDAR THOMÉE
Abstract. We consider the discretization in time of a fractional
order diffusion equation. The approximation is based on a further
development of the approach of using Laplace transformation to
represent the solution as a contour integral, evaluated to high accuracy by quadrature. This technique reduces the problem to a
finite set of elliptic equations with complex coefficients, which may
be solved in parallel. Three different methods, using 2N +1 quadrature points, are discussed. The first has an error of order O(e−cN )
away from t = 0, whereas the second
and third methods are uni√
formly accurate of order O(e−c N ). Unlike the first and second
methods, the third method does not use the Laplace transform of
the forcing term. The basic analysis of the time discretization takes
place in a Banach space setting and uses a resolvent estimate for
the associated elliptic operator. The methods are combined with
finite element discretization in the spatial variables to yield fully
discrete methods.
1. Introduction
For −1 < α < 1, we shall consider numerical, particularly time
discretization, methods for an initial-value problem of the form
(1.1)
∂t u + ∂t−α Au = f (t),
for t > 0, with u(0) = u0 ,
where ∂t = ∂/∂t, and where A is a sectorial linear operator in a complex
Banach space B.
In the applications we have in mind, A is a linear, second-order
elliptic partial differential operator in some spatial variables (whose
coefficients must be independent of t). If α = 0, the problem (1.1) then
reduces to a classical parabolic equation, providing, e.g., a macroscopic
model of the density u of diffusing particles that undergo Brownian
motion with mean-square displacement proportional to t. If −1 <
α < 0 then (1.1) instead models anomalous sub-diffusion, see Gorenflo,
Mainardi, Moretti and Paradisi [5], Henry and Wearne [6], Metzler and
Date: February 16, 2007.
Key words and phrases. fractional order diffusion equation, Laplace transformation, resolvent, quadrature, spatially semidiscrete approximation, finite elements.
This research was supported by the Australian Research Council under the Centres of Excellence program.
1
2
W. MCLEAN AND V. THOMÉE
Klafter [16], Yuste, Acado and Lindenberg [27], in which the meansquare displacement of the diffusing particles is proportional to t1+α .
The case 0 < α < 1 is of interest for applications in viscoelasticity.
Schneider and Wyss [21] describe (1.1) as a fractional diffusion equation
if −1 < α < 0 and as a fractional wave equation if 0 < α < 1.
Denoting the Laplace transform of u with respect to t by
Z ∞
(1.2)
u
b(z) = L{u(t)} =
e−zt u(t) dt,
0
we find that the solution of (1.1) formally satisfies
(1.3)
(zI + z −α A)b
u(z) = g(z) := u0 + fb(z),
where I denotes the identity operator in the Banach space B. This
equation serves as an implicit definition of ∂t−α . Equivalently, since
L{tµ−1 /Γ (µ)} = z −µ ,
for µ > 0,
we may interpret the the fractional order time derivative (α < 0) or
integral (α > 0) in the the Riemann–Liouville sense,
Z t
(t − s)α
∂t
u(s) ds, if −1 < α < 0,
0 Γ (1 + α)
−α
(∂t u)(t) := Z t
(t − s)α−1
u(s) ds, if 0 < α < 1.
Γ (α)
0
Thus, (1.1) is an integro-differential equation for α 6= 0, and so the
problem is non-local in time.
Instead of using time stepping for the numerical solution, as was
done for the case 0 < α < 1, e.g., in [19, 13, 14, 10, 17, 11], our
approach is to represent the solution of (1.1) as an inverse Laplace
transform, which is then approximated by quadrature. Developed first
for parabolic problems (α = 0) in Sheen, Sloan and Thomée [22, 23],
such an approach is even more attractive for problems as occurring
in (1.1) with α 6= 0, involving convolution integrals in time, see LópezFernandez, Palencia and Schädle [8], McLean and Thomée [15] and
McLean, Sloan and Thomée [12]. In our present paper we improve
the results from [15] by using more accurate quadrature, and also by
introducing a technique that avoids use of the Laplace transform of
the inhomogeneous term f (t). In addition, we cover the case −1 <
α < 0, which has received less attention from a numerical point of
view; see, however, some generalizations of the implicit (Langlands
and Henry [7]) and explicit (Yuste and Acedo [26]) Euler method, and
an example (Weideman [25]) in the context of numerical inversion of
Laplace transforms.
Turning to some technical assumptions, we require the spectrum of A
to lie in the interior of a closed sector in C of the form
π
(1.4) Σϕ = {z 6= 0 : | arg z| ≤ ϕ} ∪ {0}, with 0 < ϕ < (1 − α) .
2
SOLUTION OF A FRACTIONAL ORDER EVOLUTION EQUATION
3
In addition, we assume that for some constant M ≥ 1 the operator A
satisfies the resolvent estimate
M
(1.5)
k(zI − A)−1 k ≤
, for z ∈ C \ Σϕ ,
1 + |z|
or, equivalently,
(1.6)
k(zI + A)−1 k ≤
M
,
1 + |z|
for z ∈ Σπ−ϕ ,
where k · k also denotes the operator norm induced by the norm in B.
From (1.3), it follows that
(1.7)
b
u
b(z) = E(z)g(z),
b := z α (z 1+α I + A)−1 ,
where E(z)
and from (1.6) we obtain, for any β < π with 12 π < β ≤ (π −ϕ)/(1+α),
(1.8)
b
kE(z)k
≤
M|z|α
M
≤
,
1 + |z|1+α
|z|
for z ∈ Σβ ,
since z 1+α ∈ Σπ−ϕ for z ∈ Σβ ; note that (π − ϕ)/(1 + α) > 12 π by (1.4).
For any ω > 0, let Γ0 be the line Re z = ω, with Im z increasing, and
recall the Laplace inversion formula
Z
1
ezt u
b(z) dz, for t > 0.
u(t) =
2πi Γ0
Now let Γ be any curve in the sector Σβ which is homotopic with Γ0 ,
b
and assume that the Laplace transform f(z),
defined according to (1.2),
may be continued as an analytic function to the closed subdomain of
Σβ to the right of Γ and including Γ. We may then write
Z
1
b
(1.9)
u(t) =
ezt w(z) dz, where w(z) = E(z)g(z).
2πi Γ
Taking f ≡ 0 in (1.3), so that g(z) = u0 in (1.7), we see that the
solution operator for the homogeneous case of problem (1.1) is given
by
Z
1
b
(1.10)
E(t)u0 =
ezt E(z)u
0 dz.
2πi Γ
b fb(z) is the convolution of
Since the inverse Laplace transform of E(z)
E(t) and f (t), one may show the Duhamel formula
Z t
(1.11)
u(t) = E(t)u0 +
E(t − s)f (s) ds.
0
By the argument in [15, Theorems 2.1 and 2.2] one may establish the
stability and smoothing property
(1.12)
kAσ E (k) (t)u0 k ≤ CMt−σ(1+α)−k ku0 k,
for t > 0, σ, k ≥ 0.
4
W. MCLEAN AND V. THOMÉE
In particular, by the case σ = k = 0, it follows from (1.11) that the
continuous problem (1.1) is stable in the sense that
Z t
(1.13)
ku(t)k ≤ CM ku0 k +
kf (s)k ds , for t ≥ 0.
0
For our numerical method we thus select an integration contour Γ
in (1.9), such that fb(z), and thus also g(z), is analytic on and to the
right of Γ, and then apply a quadrature formula to (1.9). To make this
more precise, we assume that fb is analytic in Σωβ := ω + Σβ ⊂ Σβ , with
ω ≥ 0, 21 π < β ≤ β < π, and we choose Γ to be a curve with parametric
representation of the form
(1.14)
z(ξ) := ω + λ(1 − sin(δ − iξ)),
for ξ ∈ R,
where the constants λ and δ satisfy
(1.15)
λ > 0 and 0 < δ < β − 12 π.
Writing z = x + iy we find that Γ is the left branch of the hyperbola
2 2
x−ω−λ
y
(1.16)
−
= 1,
λ sin δ
λ cos δ
which cuts the real axis at the point z = ω +λ(1−sin δ) and has asymptotes y = ±(x − ω − λ) cot δ. Thus, the conditions (1.15) ensure that
Γ lies in the sector Σωβ and crosses into the left half-plane. The same
family of contours was used in [15], with a different parametrization.
Using (1.14) in (1.9) we may represent u(t) as an integral in ξ,
Z ∞
1 z(ξ)t
(1.17) u(t) =
v(ξ, t) dξ, where v(ξ, t) =
e
w z(ξ) z 0 (ξ).
2πi
−∞
The factor ez(ξ)t has modulus eRe z(ξ)t = eωt eλt(1−sin δ cosh ξ) , showing
that as a function of ξ, the integrand exhibits a very rapid, doubleexponential, decay as |ξ| → ∞, for any fixed t > 0.
For our first approximation method, we choose a quadrature step k >
0 and apply an equal weight quadrature rule
Z ∞
N
X
(1.18) QN (v) := k
v(ξj ) ≈ J(v) :=
v(ξ) dξ, with ξj := jk.
j=−N
−∞
Setting zj := z(ξj ), zj0 := z 0 (ξj ), we then obtain an approximate solution to our problem of the form
(1.19)
N
k X zj t
UN (t) := QN (v(·, t)) =
e w(zj ) zj0 .
2πi j=−N
To compute UN (t) we must then solve the 2N + 1 “elliptic” equations
(1.20)
(zj1+α I + A)w(zj ) = zjα g(zj ),
for |j| ≤ N.
SOLUTION OF A FRACTIONAL ORDER EVOLUTION EQUATION
5
y
δ
r
r
π−β
λ
x
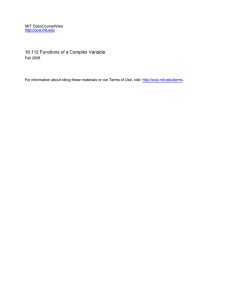
Figure 1. The region Sr (shaded) and the contour Γ
for the case ω = 0.
These equations are independent and hence may be solved in parallel.
We remark that the w(zj ) determine the approximate solutions (1.19)
for all t > 0. In practice, however, the accuracy of the approximation
UN (t) ≈ u(t) deteriorates as t → 0 or t → ∞. Notice the numerical
solution (1.19) depends on the choice of the curve Γ, even though the
representation (1.9) does not.
To analyze the quadrature error, we extend the parametric representation (1.14) of Γ to a conformal mapping
(1.21)
z = Φ(ζ) = ω + λ(1 − sin(δ − iζ)),
which transforms the strip Yr = { ζ : | Im ζ| ≤ r } with r > 0 onto the
set Sr = { Φ(ζ) : ζ ∈ Yr } ⊃ Γ. In fact, Φ maps the line Im ζ = η to
the left branch of the hyperbola
2 2
y
x−ω−λ
−
= 1,
(1.22)
λ sin(δ + η)
λ cos(δ + η)
so Sr is bounded on the left by the left branch of the hyperbola corresponding to Im ζ = r and on the right by the hyperbola branch corresponding to Im ζ = −r. To ensure that Sr ⊂ Σωβ and that Re z → −∞
if |z| → ∞ with z ∈ Sr , we require 0 < δ − r < δ + r < β − 12 π, see
Figure 1, or equivalently that
(1.23)
0 < r < min δ, β − 21 π − δ .
We introduce the notation
(1.24)
kgkX,Z := sup kg(z)kX ,
z∈Z
for X ⊆ B and Z ⊆ C,
6
W. MCLEAN AND V. THOMÉE
which we abbreviate by kgkZ if X = B. In Section 2 below, following
recent work of López-Fernandez, Palencia and Schädle [9], we shall
see that with a specific quadrature step in (1.18) satisfying k ∝ 1/N
and with λ appropriately chosen, depending on N, then we have, with
µ > 0,
(1.25) kUN (t) − u(t)k ≤ CMe−µN ku0 k + kfbkΣω , 0 < t0 ≤ t ≤ T.
β
An error bound of order O(e−cN/ log N ), for t bounded away from 0,
was derived in López-Fernandez and Palencia [8] for 0 < α < 1, and the
same argument was also applied in McLean, Sloan and Thomée [12] for
a related integro-differential equation of parabolic type. In this case,
the contour of integration Γ was fixed, independent of N, but both
parameters ω and λ in (1.14) were used to accomodate the singularities
b
of f(z).
In [15], we treated (1.1) in the case 0 < α < 1 using two other
quadrature rules with points
on the hyperbola (1.16), and obtained
√
error bounds of order O(e−c N ) and O(N −ct ), respectively, with c > 0,
for t bounded away from zero.
For the case α = 0 of a parabolic partial differential equation, Gavrilyuk and Makarov [4] modified the integrand
in the representation for√
−c N
mula (1.9) in a way that gave O(e
) convergence, uniformly down
to t = 0, provided the data possess some “spatial” regularity. A similar
modification works when α 6= 0: If we define
Z t
F (t) :=
f (s) ds and F (t) = u0 + F (t),
0
then L{F (t)} = z −1 u0 + fb(z) = z −1 g(z), so we may write
Z
1
b − z −1 I.
(1.26) u(t) = F (t) +
ezt Eb0 (z)g(z)dz, Eb 0 (z) := E(z)
2πi Γ
The point of this modification is that if g(z) possesses some spatial
b
regularity, then kEb0 (z)g(z)k decays more quickly than kE(z)g(z)k
as
|z| → ∞ for z ∈ Γ.
Setting
(1.27)
w 0 (z) := Eb0 (z)g(z) = w(z) − z −1 g(z),
and using the parametric representation (1.14) of Γ, with λ appropriately chosen in the modified integral in (1.26), we now have
Z ∞
1 z(ξ)t 0
u(t) = F (t) +
v 0 (ξ, t) dξ, v 0 (ξ, t) :=
e
w (z(ξ)) z 0 (ξ).
2πi
−∞
Applying again the quadrature rule (1.18) we obtain our second approximate solution to (1.1),
(1.28)
UN0 (t)
N
k X zj t 0
e w (zj ) zj0 .
:= F (t) +
2πi j=−N
SOLUTION OF A FRACTIONAL ORDER EVOLUTION EQUATION
7
Once again, to compute this approximate solution, we must first obtain
the values of w(zj ) for |j| ≤ N by solving the “elliptic” equations (1.20),
and then use (1.27) to find the w 0(zj ). The approximate solution UN0 (t)
is then determined by (1.28) for all t ≥ 0.
To define the “spatial” regularity we introduce a scale of Banach
spaces Bσ with norms k · kσ for σ ≥ 0 by
Bσ := { v ∈ B : Aσ v ∈ B } and kvkσ = kvkBσ = kAσ vk.
For our modified method (1.28) we are then able to prove √
that with
the quadrature step chosen in a specific way such that k ∝ 1/ N then,
with 0 < σ ≤ 1 and kgkσ,Z = kgkBσ ,Z , cf. (1.24), we have
√
(1.29) kUN0 (t) − u(t)k ≤ CM e−c N ku0 kσ + kfbkσ,Σωβ , 0 ≤ t ≤ T.
In practice, it is important to minimize the spatial regularity requirements for the inhomogeneous term so that we avoid imposing unwanted
restrictions on the boundary values of f (t). Fortunately, we may rely
instead on regularity in time, as reflected in the decay of the Laplace
b as |z| → ∞. Defining
transform f(z)
(1.30)
kgkσ,ν,Z = sup (1 + |z|)ν kg(z)kσ , for σ, ν ≥ 0,
z∈Z
we will show that if (1 + α)σ0 + ν ≥ (1 + α)σ, σ0 ≥ 0, then the error
estimate (1.29) may be replaced by
√
(1.31) kUN0 (t) − u(t)k ≤ CM e−c N ku0 kσ + kfbkσ0 ,ν,Σωβ , 0 ≤ t ≤ T.
b 1,Σω < ∞
For example, if f (t) = e−t v, then fb(z) = (1+z)−1 v so that kfk
β
requires Av ∈ B, whereas kfbk0,1,Σω < ∞ only requires v ∈ B.
β
A serious restriction in the application of these two schemes is that
they require the Laplace transform fb(z) to exist, to be computable for
each z on the contour Γ, and to be such that the norms of fb(z) indicated
above are finite. We remark that using the stability estimate (1.13),
one can see that it suffices that the given f (t) may be approximated
e which has the above properties; such
sufficiently well by a function f(t)
approximation is discussed in [23].
We therefore consider a third alternative, based on the application
of Duhamel’s formula (1.11), which does not have the disadvantages
mentioned above. Substituting the integral representation (1.10) into
(1.11), we find that
Z
Z t
Z
1
1
zt b
b
(1.32) u(t) =
e E(z)u0 dz +
ez(t−s) E(z)f
(s) dz ds
2πi Γ
2πi
Γ
0
Z
Z t
1
zt
b
=
E(z)g(z,
t) dz, g(z, t) := e u0 +
ez(t−s) f (s) ds.
2πi Γ
0
This means that, compared to (1.9), we have restricted the integration
in the definition of fb(z) to (0, t), which is consistent with the fact that
8
W. MCLEAN AND V. THOMÉE
u(t) only depends on f over this interval. Note that we have included
the factor ezt in the definition of g(z, t) to avoid floating-point overflow
when Re z is large and negative. Since
Z
1
g(z, t)
z −1 g(z, t) dz = res
= g(0, t) = F (t),
z=0
2πi Γ
z
it follows that
Z
1
Eb0 (z)g(z, t) dz,
u(t) = F (t) +
2πi Γ
b
which is similar to (1.26). Setting w(z, t) := E(z)g(z,
t) and
(1.33)
w(z,
e t) := Eb0 (z)g(z, t) = w(z, t) − z −1 g(z, t),
and using once again the parametric representation (1.14) for Γ, we
obtain
Z ∞
1
u(t) = F (t) +
ṽ(ξ, t) dξ, where ṽ(ξ, t) =
w
e z(ξ), t z 0 (ξ).
2πi
−∞
The quadrature rule (1.18) now gives our third approximate solution
(1.34)
N
X
eN (t) := F (t) + k
w(z
e j , t)zj0 ,
U
2πi j=−N
where the w(z
e j , t) may be obtained by first solving the equations
(1.35)
(zj1+α I + A)w(zj , t) = zjα g(zj , t),
for |j| ≤ N,
and then using (1.33). In contrast to the elliptic equations (1.20) arising
in the previous two schemes, the right hand sides in (1.35), and hence
also the solutions, may now depend on t. This is the price we pay to
obtain a scheme requiring only f (t) and not its Laplace transform fb(z).
Fortunately, the equations (1.35) are independent both for different j
and for different t, so not only can we solve each system of 2N + 1
equations in parallel, but we may also solve the systems for different t
in parallel.
√
For our third scheme (1.34) we prove that with a k ∝ 1/ N , and if
σ0 + (1 + α)−1 ≥ σ, then
√ eN (t) − u(t)k ≤ CM e−c N ku0 kσ
(1.36)
kU
Z t
+ kf (0)kσ0 +
kf 0 (s)kσ0 ds , for 0 ≤ t ≤ T,
0
i.e., the convergence rate is the same as in (1.31) but with no requirement that fb(z) exist and be bounded for z ∈ Σωβ .
The error in approximating f (t) by a function fe(t), for instance
by some interpolation process, which makes g(z, t) defined in (1.32)
more easily computable, may again be handled by the stability estimate
(1.13).
SOLUTION OF A FRACTIONAL ORDER EVOLUTION EQUATION
9
Section 2 of the paper sets out the details of the error analysis
sketched above. In subsequent parts of the paper, we proceed to consider the application of our methods for time discretization to the
design of fully discrete schemes for the case of equation (1.1) when
A = −∆, where ∆ is the Laplacian in a smooth (or convex) bounded
domain Ω ⊂ Rd , under homogeneous Dirichlet boundary conditions.
We then first discretize (1.1) in the spatial variables by piecewise linear finite elements, which results in an initial boundary value problem
of the form (1.1) in the finite element space, where now A = Ah = −∆h ,
with ∆h the discrete Laplacian. To define a fully discrete solution we
may then apply one of our above time discretization methods to this
spatially semidiscrete problem.
Thus, our initial value problem (1.1) now takes the form
(1.37)
∂t u − ∂t−α ∆u = f (t),
for t > 0, with u(0) = u0 ,
and we consider this equation in the Hilbert space L2 = L2 (Ω) equipped
with the usual norm k · kL2 . Since A = −∆ is positive definite, we have
spec(A) ⊂ (0, ∞), and it is clear that ∆ generates an analytic semigroup e∆t , and that the resolvent estimate (1.5) holds for arbitrarily
small ϕ. In particular, it follows that the stability and smoothness
estimates (1.12) hold in this case.
To discretize in space only, we use a family of triangulations Th =
{K} of Ω indexed by h, the maximum diameter of the elements K.
Let Vh denote the corresponding space of continuous piecewise linear
functions vanishing on ∂Ω, and recall the approximation property
inf kv − χkL2 + hk∇(v − χ)kL2 ≤ Ch2 kvkH 2 .
χ∈Vh
The spatially semidiscrete problem is then to find uh (t) ∈ Vh for t ≥ 0,
such that
(∂t uh , χ) + (∂t−α ∇uh , ∇χ) = (f, χ), ∀χ ∈ Vh , t ≥ 0,
(1.38)
uh (0) = u0h .
Here, as usual, (·, ·) denotes the inner product in L2 (Ω) and u0h ∈ Vh
is a suitable approximation to u0 . Introducing the discrete Laplacian
∆h : Vh → Vh defined by
−(∆h ψ, χ) = (∇ψ, ∇χ),
for ψ, χ ∈ Vh ,
the problem (1.38) is equivalent to
(1.39)
∂t uh − ∂t−α ∆h uh = Ph f (t),
for t ≥ 0,
with uh (0) = u0h ,
where Ph : L2 (Ω) → Vh is the orthogonal projector with respect to
(·, ·). Since −∆h is positive definite, the resolvent estimate (1.5) again
holds for arbitrarily small ϕ, with M independent of h. Thus, also the
analogue of (1.12) applies to the solution operator Eh (t) of the spatially
semidiscrete homogeneous equation.
10
W. MCLEAN AND V. THOMÉE
In the analysis in Section 3 of the spatial discretization we show the
nonsmooth and smooth data error estimates, with u0h = Ph u0 ,
kuh (t) − u(t)kL ≤ C 2 t−1−α h2 (ku0kL + kfbkL ,Σω ), for 0 < t ≤ T ,
2
2
2
β
and, for u0 and f sufficiently smooth, but with f (t) not necessarily
satisfying any boundary conditions for t > 0,
kuh (t) − u(t)kL2 ≤ C(u0 , f )h2 ,
for 0 ≤ t ≤ T.
Subsequently, in Section 4, we apply the error estimates (1.25), (1.31)
and (1.36) for our time discretization methods to the spatially semidiscrete problem, in a way which yields error estimates for the corresponding fully discrete solutions.
Finally, in Section 5 we present the results of some simple numerical
experiments, illustrating our theoretical results.
We note that the problems (1.37) and (1.38) could also have been
considered in the Banach space C0 (Ω) of continuous functions, vanishing on ∂Ω, equipped with the maximum-norm. In fact, the resolvent estimate (1.5) then holds for A = −∆ by Stewart [24], and for A = −∆h ,
uniformly in h, in the case of quasiuniform triangulations, by Bakaev,
Thomée and Wahlbin [1]. We shall not give the details here.
2. Time discretization
We begin by showing the nonsmooth data error estimate (1.25),
which is based on an error bound for the quadrature rule (1.18). The
analysis will depend on assuming that the integrand may be analytically continued into a strip Yr around the real axis in the complex
ζ-plane, and satisfies a certain boundedness property there.
The next lemma is essentially an improvement, used in [9], of [8,
Theorem 2], cf. also [12], and shows that under appropriate conditions
the quadrature error is of order O(e−µN ) as N → ∞, with µ > 0, for t
bounded away from zero. For completeness we include a sketch of the
proof. Here and below we write r̄ = 2πr and `(t) = max 1, log(1/t) .
Lemma 2.1. Assume v is analytic in the strip Yr = {ζ : | Im ζ| ≤ r},
and that there exist positive Vη and γη , increasing in η, such that
(2.1)
kv(ζ)k ≤ Vη e−γη cosh ξ
for ζ = ξ + iη ∈ Yr .
Then, with QN (v) and J(v) as in (1.18), and if k = b/N, where b
satisfies b cosh b = r̄N/γ0 , we have, for k ≤ r̄/ log 2,
kQN (v) − J(v)k ≤ CVr `(γ−r ) e−r̄N/b .
P
Proof. Let Q∞ (v) = k ∞
j=−∞ v(jk). Using contour integration as in
[15, Theorem 3.1] it can be shown that
Z ∞
e−r̄/k
(2.3) kQ∞ (v) − J(v)k ≤
kv(ξ
+
ir)k
+
kv(ξ
−
ir)k
dξ,
1 − e−r̄/k −∞
(2.2)
SOLUTION OF A FRACTIONAL ORDER EVOLUTION EQUATION
11
so we have, since e−r̄/k ≤ 1/2 and r̄/k = r̄N/b,
Z
4Vr e−r̄/k ∞ −γ−r cosh ξ
e
dξ ≤ CVr `(γ−r )e−r̄N/b ,
kQ∞ (v) − J(v)k ≤
1 − e−r̄/k 0
where we have used, see [8], that the integral is bounded by C`(γr ).
Estimating the remainder of the infinite sum, we have
Z ∞
∞
X
−γ0 cosh(jk)
kQ∞ (v) − QN (v)k ≤ 2V0 k
e
≤ 2Vr
e−γ0 cosh ξ dξ,
j=N +1
Nk
and, because γ0 cosh(Nk) = γ0 cosh b = r̄N/b, we find, using the substitution s = cosh ξ − cosh(Nk), that
Z ∞
Z ∞
e−γ0 s
−γ0 cosh ξ
−γ0 cosh(N k)
p
ds
e
dξ = e
(s + cosh(Nk))2 − 1
Nk
0
Z ∞
e−γ0 s
−r̄N/b
√
≤e
ds ≤ Ce−r̄N/b `(γ0 ).
2 + 2s
s
0
Since `(t) is decreasing, this completes the proof of (2.2).
To apply Lemma 2.1 to our numerical method, recall the conformal
mapping Φ : ζ 7→ z defined in (1.21), whose restriction to the real axis
coincides with the parametric representation (1.14) of the integration
contour Γ ⊂ Sr = Φ(Yr ). In the proof of our error estimate for UN (t)
we shall need the following technical lemma for the behavior of Φ(ζ).
Lemma 2.2. If ζ = ξ + iη, then we have, for ζ ∈ Yr ,
Φ0 (ζ) 2
|ξ|
2
1
≤
|Φ(ζ) − ω| ≥ 2 λ e cos (δ + η) and .
Φ(ζ) − ω
cos(δ + η)
Proof. We have, setting ψ = δ + η for brevity,
|Φ(ζ) − ω|2 = λ2 |1 − sin(ψ − iξ)|2
Hence
= λ2 (1 − sin ψ cosh ξ)2 + cos2 ψ sinh2 ξ = λ2 (cosh ξ − sin ψ)2 .
e−|ξ| |Φ(ζ) − ω| = λe−|ξ| (cosh ξ − sin ψ) = 21 λ(e−2|ξ| − 2e−|ξ| sin ψ + 1)
= 21 λ (e−|ξ| − sin ψ)2 + cos2 ψ ≥ 21 λ cos2 ψ.
Similarly
(2.4)
and hence
|Φ0 (ζ)|2 = λ2 | cos(ψ − iξ)|2 = λ2 (cosh2 ξ − sin2 ψ),
2
2
Φ0 (ζ) 2
= cosh ξ − sin ψ = cosh ξ + sin ψ
Φ(ζ) − ω (cosh ξ − sin ψ)2
cosh ξ − sin ψ
4
1 + sin ψ
≤
.
≤
1 − sin ψ
cos2 ψ
12
W. MCLEAN AND V. THOMÉE
We are now ready for the proof of (1.25). We recall from (1.24) the
notation kgkZ = supz∈Z kg(z)k.
Theorem 2.1. Let u(t) be the solution of (1.1), with fb analytic in
Σωβ . Let 0 < t0 < T, 0 < θ < 1, and let b > 0 be defined by cosh b =
1/(θτ sin δ), where τ = t0 /T . Let r satisfy (1.23) so that Γ ⊂ Sr ⊂ Σωβ ,
and let the scaling factor be λ = θr̄N/(bT ). Then we have, for the
approximate solution UN (t) defined by (1.19), with k = b/N ≤ r̄/ log 2,
b Σω , for t0 ≤ t ≤ T,
kUN (t) − u(t)k ≤ CM eωt `(ρr N)e−µN ku0 k + kfk
β
where µ = r̄(1 − θ)/b, ρr = θr̄τ sin(δ − r)/b, and C = Cδ,r,β .
Proof. To apply Lemma 2.1 to the representation (1.17), we set
(2.5)
v(ζ, t) =
1 Φ(ζ) t
e
w(Φ(ζ))Φ0 (ζ),
2πi
for ζ ∈ Yr .
b
Since w(z) = E(z)g(z),
cf. (1.9), the resolvent estimate (1.8) and the
inequality |z| ≥ cβ |z − ω| for z ∈ Σωβ , with cβ = sin β > 0, give
kw(z)k ≤ M|z|−1 g(z) ≤ CM|z − ω|−1g(z), for z ∈ Σωβ ,
and so, since Re Φ(ζ) = ω + λ(1 − sin(δ + η) cosh ξ), we have
ωt
λt(1−sin(δ+η) cosh ξ)
kv(ζ, t)k ≤ CMe e
|Φ0 (ζ)|
kgkΣωβ ,
|Φ(ζ) − ω|
for ζ ∈ Yr .
Thus, using Lemma 2.2, we see that v(ζ, t) satisfies (2.1) with
(2.6) Vη =
CM
e(ω+λ)t kgkΣωβ , γη = λt0 sin(δ + η),
cos(δ + η)
for t ≥ t0 .
With b and λ chosen as stated we have b cosh b = b/(θτ sin δ) =
bT λ/(θλt0 sin δ) = r̄N/γ0 , and hence Lemma 2.1 yields
kUN (t) − u(t)k ≤ CM`(γ−r )eωt eλT e−r̄N/b kgkΣωβ ,
for t0 ≤ t ≤ T.
Since λT − r̄N/b = (θ − 1)r̄N/b = −µN and γ−r = λt0 sin(δ − r) =
θr̄τ N sin(δ − r)/b = ρr N, this shows the result stated.
We remark that `(ρr N) = 1 for N ≥ 1/(ρr e) but that this lower
bound is large for θ, τ and δ − r small, and also note that the constant
Cδ,r,β is independent of θ, t0 and T .
Although Theorem 2.1 implies stability in the sense that
kUN (t)k ≤ C(ku0k + kfbkΣωβ ),
for t0 ≤ t ≤ T,
numerical evaluation of the sum (1.19) is sensitive to perturbations in
w(zj ), cf. [9]. To illustrate this, assume that there are perturbations
of w(zj ) (in applications containing the errors in solving the elliptic
SOLUTION OF A FRACTIONAL ORDER EVOLUTION EQUATION
13
equations (1.20)), which are bounded by ε in norm for all j. Then,
using (2.4), the effect on UN (t) may be bounded by
X
k X Φ(ξj ) 0
|e
Φ (ξj )| ≤ C ε λ e(ω+λ)t k
cosh ξj e−γ0 cosh ξj .
ε
2π
|j|≤N
|j|≤N
One may show (cf. [9], p. 1340) that the Riemann sum is bounded by
C/γ0 , and since λ/γ0 ≤ C and λt ≤ λT = (θr̄/b)N, for t0 ≤ t ≤ T ,
the above error is bounded by Cεe(θr̄/b)N , which grows exponentially
with N. The instability is weaker with a smaller θ, at the expense
of the rate of convergence in Theorem 2.1, and may be removed by
choosing θ = 1/N: In this case b = O(log N) and the error of order
O(e−cN/ log N ), with c > 0, cf. also [8], [12]. For a more sophisticated
approach to choosing θ = O(1/N), see the discussion in [9, Section 4].
We shall now consider error estimates which hold uniformly down to
t = 0, under some regularity assumptions on the data, for the modified approximation rules (1.28) and (1.34) based on the representations (1.26) and (1.32), respectively. We remark that it is not difficult
to show that the result of Theorem 2.1 is valid also when the quadrature rule (1.18) is applied to the modified representation (1.26), i.e.,
the choice k = b/N again leads to convergence of order O(e−cN ) for t
bounded away from zero. We begin with a technical lemma.
Lemma 2.3. If A satisfies the resolvent estimate (1.5) and if 0 ≤ σ ≤
1, then, with Eb0 (z) as defined in (1.26), we have
0
Cσ M
Eb (z)v ≤
kvkσ , for z ∈ Σβ and v ∈ Bσ .
|z|(1 + |z|1+α )σ
Proof. Setting w = z 1+α , R(w) = (wI + A)−1 , we have
Eb0(z) = (wI + A)−1 (z α I − z −1 (wI + A)) = −z −1 A1−σ R(w)Aσ ,
and, using the interpolation inequality, cf. Pazy [18, p. 73],
(2.7)
kvk1−σ ≤ Cσ kvkσ0 kvk1−σ
= Cσ kvkσ kAvk1−σ ,
1
we conclude
0
Eb (z)v = |z|−1 R(w)Aσ v 1−σ
1−σ
−1 σ σ AR(w)Aσ v .
≤ Cσ |z|
R(w)A v
If z ∈ Σβ , then (1.8) and the fact that AR(w) = I − wR(w) give
σ
R(w)Aσ v ≤ MkA vk and AR(w)Aσ v ≤ CMkAσ vk.
1 + |w|
Together these estimates show the desired bound.
The following lemma provides the modification of Lemma 2.1 appropriate to an assumed “single exponential” decay rate for the integrand.
14
W. MCLEAN AND V. THOMÉE
Lemma 2.4. Assume that v(ζ) is bounded and analytic in Yr , and that
kv(ζ)k ≤ V e−γ|ξ| ,
for ζ = ξ + iη ∈ Yr ,
with γ > 0.
p
Then, with QN (v) and J(v) as in (1.18), we have, for k = r̄/(γN) ≤
r̄/ log 2,
kQN (v) − J(v)k ≤ Cr V γ −1 e−
(2.8)
√
r̄γN
.
Proof. By (2.3) we obtain, since e−r̄/k ≤ 1/2,
Z ∞
4V e−r̄/k
kQ∞ (v) − J(v)k ≤
e−γξ dξ ≤ 8γ −1 V e−r̄/k ,
1 − e−r̄/k 0
whereas for the tail of the infinite sum,
Z ∞
∞
X
−γξj
kQ∞ (v) − QN (v)k ≤ 2V k
e
≤ 2V
e−γξ dξ ≤ 2V γ −1 e−γN k .
j=N +1
Nk
The error bound (2.8) now follows by the triangle inequality, after
choosing r̄/k = γNk, i.e., as stated.
√
We are now ready to show the convergence of order O(e−c N ), uniformly down to t = 0, for our second approximation method (1.28). In
order to reduce the demands for “spatial” regularity on the inhomogeneous term f (t), we use the norms kfbkσ,ν,Z introduced in (1.30).
Theorem 2.2. Let u(t) be the solution of (1.1), with fb analytic in Σωβ .
Let 0 < σ ≤ 1, set γ = (1 + α)σ, and let Γ ⊂ Sr ⊂ Σωβ be defined by
λ = γ/(κT ), where κ = 1p− sin(δ − r). Let UN (t) be the approximate
solution (1.28) with k = r̄/(γN) ≤ r̄/ log 2. Then, if σ0 , ν ≥ 0 and
σ0 + ν(1 + α)−1 ≥ σ, we have, with C = Cδ,r,β,σ,σ0 , for 0 ≤ t ≤ T ,
√
kU 0 (t) − u(t)k ≤ CMγ −1 T γ eωt e− r̄γN (ku0kσ + kfbkσ ,ν,Σω ).
N
0
0
β
0
Proof. Define v (ζ, t) as v(ζ, t) in (2.5), but with w in place of w,
where w 0 (z) is defined by (1.27). By Lemma 2.3 we have, for z ∈ Σωβ ,
kw 0(z)k ≤ kEb0(z)u0 k + kEb0 (z)fb(z)k ≤
Cσ M
ku0 kσ
|z|(1 + |z|)(1+α)σ
Cσ0 M
(1 + |z|)ν kfb(z)kσ0
|z| (1 + |z|)(1+α)σ0 +ν
CM
CM
≤ 1+γ G ≤
G, where G = ku0 kσ + kfbkσ0 ,ν,Σωβ ,
|z|
|z − ω|1+γ
where we have used (1 + α)σ0 + ν ≥ (1 + α)σ = γ and |z| ≥ cβ |z − ω|
on Σωβ . Hence, by Lemma 2.2, using also 1 − sin(δ + η) cosh ξ ≤ κ,
+
(2.9)
kv 0 (ζ, t)k ≤ CM eωt eλt(1−sin(δ+η) cosh ξ)
≤ CM eωt
|Φ0 (ζ)|
G
|Φ(ζ) − ω|1+γ
eλκT −γ|ξ|
e
G ≤ CM eωt γ −γ T γ e−γ|ξ| G,
γ
λ
for ζ ∈ Yr .
SOLUTION OF A FRACTIONAL ORDER EVOLUTION EQUATION
15
Since γ −γ is bounded it follows by Lemma 2.4 that
kUN0 (t) − u(t)k ≤ CM eωt γ −1 T γ e−
√
r̄γN
G,
for 0 ≤ t ≤ T.
Note that our choice of λ minimizes the ratio eλκT /λγ .
We remark that the contour Γ used in Theorem 2.2 depends on the
parameter σ, i.e., on the regularity we wish to assume on the data.
We also remark that in (2.9) we have simply disregarded the double
exponential decay of the factor e−λt sin(δ+η) cosh ξ by using cosh ξ ≥ 1.
See our later comments on the numerical results in Figure 2.
Under the choices of parameters made one may show a weak stability
result for UN (t) in terms of data. In fact, similarly to (2.9) one finds
kv 0 (ξ, t)k ≤ CM eωt (ku0k + kfbkΣωβ ), for ξ ∈ R,
√
and hence we have from (1.18), since kN ≤ C N, for t ≥ 0,
(2.10)
kUN0 (t)k ≤ kF (t)k + kQN (v 0 (·, t))k
Z t
√
≤ ku0 k +
kf (s)k ds + CMeωt N (ku0k + kfbkΣωβ ).
0
In view of the exponential decay factors e−µN = e−r̄(1−θ)N/b and
e− r̄γN that occur in the preceding error bounds, we see that the larger
the value of the angle r in Figure 1, the faster the convergence. Thus,
in practice, one should choose r slightly smaller than δ = 21 (β − 21 π).
Consider a problem in which the spectrum of A allows us to take β
b
close to π, but f(z)
has poles at z = pl ∈ Σβ for l = 1, 2, . . . , L,
forcing us to use a value of β close to 12 π and hence a small value of r,
or a large value of ω, resulting in serious exponential growth of the
error bound. To improve the convergence rate, we may instead choose
Γ passing to the left of the poles provided we incorporate the residues
in the representation (1.9), so that
Z
L
X
1
ezt w(z) dz,
(2.11)
u(t) =
ul (t) +
2πi Γ
√
l=1
b at z = pl ,
where, if ml denotes the multiplicity of the pole of f(z)
ml −1
d
1
zt
(z − pl )ml ezt w(z) .
ul (t) = res e w(z) = lim
z=pl
z→pl (ml − 1)! dz
For a simple pole, i.e., for ml = 1, we can compute ul (t) = epl t vl by
solving the elliptic problem
(p1+α
I + A)vl = pαl res fb(z).
l
z=pl
In Section 5, we present some numerical results where the integral
in (2.11) is approximated as in Theorem 2.1.
16
W. MCLEAN AND V. THOMÉE
We now turn to the error bound of our third method, which looks
as for our second method, and is also valid uniformly down to t = 0.
Since the method does not use fb(z) the error bound is now expressed
directly in terms of u0 and f (t). Here we may use ω = 0 and β = β.
Theorem 2.3. Let u(t) be the solution of (1.1). Let 0 < σ ≤ 1, set
γ = (1 + α)σ, and let Γ ⊂ Sr ⊂ Σβ be defined by λ = γ/(κT ), with
κ = 1 − sin(δ − r). Then, if σ0 + (1 + α)−1 ≥ p
σ, we have for the
eN (t) from (1.34), with k = r̄/(γN) ≤ r̄/ log 2
approximate solution U
and C = Cδ,r,β̄,σ,σ0 ,
√
eN (t) − u(t)k ≤ CMγ −1 T γ e− r̄γN ku0 kσ
kU
Z t
0
+ kf (0)kσ0 +
kf (s)kσ0 ds , for 0 ≤ t ≤ T,
0
Proof. Recalling the definition (1.33) we show, for z ∈ Σβ ,
Z t
eλκt kf 0 (s)kσ0 ds .
(2.12) kw(z,
e t)k ≤ CM 1+γ ku0kσ + kf (0)kσ0 +
|z|
0
For this purpose, we note that integration by parts gives
Z t
0
zt
w(z,
e t) = Eb (z) e u0 +
ez(t−s) f (s) ds ,
0
Z t
0
zt
−1
zt
z(t−s) 0
b
= E (z) e u0 + z
f (0)e − f (t) +
e
f (s) ds .
0
Thus, using Lemma 2.3, we find, with γ0 = (1 + α)σ0 ,
1
λ κt
kw(z,
e t)k ≤ CMe
ku0kσ
|z|(1 + |z|)γ
Z t
1
0
kf
(0)k
+
kf
(t)k
+
kf
(s)k
ds
.
+
σ0
σ0
σ0
|z|(1 + |z|)1+γ0
0
Since 1 + γ0 ≥ γ, and bounding kf (t)kσ0 in the obvious way, (2.12)
follows. For
1
v (ζ, t) =
e
w(Φ(ζ),
e
t)Φ0 (ζ),
2πi
we hence have, for ζ ∈ Yr ,
Z t
0
0
λκt |Φ (ζ)|
ku
k
+
kf
(0)k
+
kf
(s)k
ds
.
ke
v(ζ, t)k ≤ CM e
0
σ
σ
σ
0
0
|Φ(ζ)|1+γ
0
We may now proceed as in the proof of Theorem 2.2.
Since the factor e−λt sin(δ+η) cosh ξ of (2.9) is not present in the above
estimate for kv(ζ, t)k, the earlier argument for a O(e−cN ) error bound
for t bounded away from zero does not apply. As mentioned in the
introduction, the exponential factor is now needed to make the integral
term in g(z, t) in (1.32) appropriately convergent.
SOLUTION OF A FRACTIONAL ORDER EVOLUTION EQUATION
17
Similarly to (2.10) one shows easily the weak stability result
Z t
√ e
kf (s)k ds , for t ≥ 0.
kUN (t)k ≤ CM N ku0 k +
0
3. Spatial discretization by finite elements
In this section we prepare the analysis of our fully discrete methods
by showing three error estimates for the spatially semidiscrete method
(1.38) which are designed to be combined with the error bounds in
Section 2 for our three time discretization methods. We begin with
a nonsmooth data error estimate for the semidiscrete problem, which
was shown in [15, Theorem 5.1] for 0 < α < 1. The argument for
−1 < α ≤ 0 is the same, but for completeness and later reference we
include the proof.
Theorem 3.1. Let uh (t) and u(t) be the solutions of (1.38) and (1.37),
with fb analytic in Σωβ , and let u0h = Ph u0 . Then, with C = Cβ,T ,
kuh (t) − u(t)kL2 ≤ Ch2 t−1−α ku0kL2 + kfbkL2 ,Σωβ , for 0 < t ≤ T.
Proof. With notation as above we have, taking Γ = ∂Σωβ ,
Z
1
(3.1)
uh (t) − u(t) =
ezt z α Gh (z)g(z) dz,
2πi Γ
where, with A = −∆ and Ah = −∆h , cf. (1.7),
b
Gh (z) := z −α Ebh (z)Ph − E(z)
= (z 1+α I + Ah )−1 Ph − (z 1+α I + A)−1 .
We shall prove below that
(3.2)
kGh (z)vkL2 ≤ Ch2 kvkL2 ,
for z ∈ Σβ .
Assume this has been shown. Then, since cβ |z − ω| ≤ |z| ≤ |z − ω| + ω
for z ∈ Σωβ , with cβ = sin β > 0, we have, setting z = ω + se±iβ ∈ Γ,
that |z|α ≤ Csα when α < 0 and |z|α ≤ C(1 + sα ) when α ≥ 0. Hence,
for α < 0, since eωt is bounded for t ≤ T ,
Z ∞
2
kuh (t) − u(t)kL2 ≤ Ch
sα e−cts ds kgkL2,Γ ≤ Ch2 t−1−α kgkL2 ,Σωβ ,
0
and similarly, for α ≥ 0,
kuh (t) − u(t)kL2 ≤ Ch2 (t−1 + t−1−α ) kgkL2,Γ ≤ Ch2 t−1−α kgkL2,Σωβ .
Together these estimates show the result stated.
To show (3.2), we set w = z 1+α , R(w) = (wI + A)−1 and Rh (w) =
(wI + Ah )−1 and write
where
Gh (z) = Rh (w)Ph − R(w) = G1h (z) + G2h (z),
G1h (z) := (Ph − I)R(w) and G2h (z) := Rh (w)Ph − Ph R(w).
18
W. MCLEAN AND V. THOMÉE
We recall the elliptic regularity estimate
(3.3)
kvkH 2 ≤ CkAvkL2 ,
if v = 0 on ∂Ω.
Since kPh v − vkL2 ≤ Ch2 kvkH 2 and since the operator AR(w) is uniformly bounded for z ∈ Σβ , we obtain
(3.4) kG1h (z)vkL2 ≤ Ch2 kR(w)vkH 2 ≤ Ch2 kAR(w)vkL2 ≤ Ch2 kvkL2 ·
To bound G2h (z), we use the Ritz projector Rh : H01 (Ω) → Vh , defined
by
(∇Rh v, ∇χ) = (∇v, ∇χ), ∀χ ∈ Vh .
The identity Ph A = Ah Rh implies
G2h (z) = Rh (w) Ph (wI + A) − (wI + Ah )Ph R(w)
= Rh (w)Ah (Rh − Ph )R(w) = Rh (w)Ah Ph (Rh − I)R(w).
Since Rh (w)Ah Ph is uniformly bounded on Σβ , and using the wellknown error estimate kRh v − vk ≤ Ch2 kvkH 2 together with (3.3), we
obtain as in (3.4)
(3.5)
kG2h (z)vkL2 ≤ Ch2 kR(w)vkH 2 ≤ Ch2 kvkL2 ,
which completes the proof of (3.2), and thus of the theorem.
We now show a smooth data estimate holding uniformly down to t =
0, intended for use with our second method. Recalling (1.30) and
setting Ḣ σ = Bσ/2 for A = −∆, with homogeneous Dirichlet boundary
conditions, we use the notation
kgkḢ σ ,ν,Z = sup (1 + |z|)ν kg(z)kḢ σ .
z∈Z
Theorem 3.2. Let uh (t) and u(t) be the solutions of (1.38) and (1.37),
with fb analytic in Σωβ , and with u0h = Ph u0 . Then, if 0 < σ ≤ 1, ν ≥ 0
and (1 + α)σ + ν ≥ 1 + α, we have, with C = Cβ ,
2 ωt
b
ku0 kḢ 2 + kfkḢ 2σ ,ν,Σω , for t ≥ 0.
kuh (t) − u(t)kL2 ≤ Ch e
β
0
Proof. We shall again use (3.1), now with Γ = ω + Γ0t ∪ Γ∞
t , where Γt =
{z : |z| = 1/t, | arg z| ≤ β} and Γ∞
t = {z : | arg z| = β, |z| > 1/t}.
First note that by (3.4) and (3.5), and since A commutes with R(w),
we have, for z ∈ Σωβ ,
(3.6)
kGh (z)vkL2 ≤ Ch2 kR(w)AvkL2
≤
Ch2
Ch2
kAvkL2 ≤
kvkḢ 2 .
1 + |w|
1 + |z|1+α
Hence, in the case that f (t) = 0, we have
Z
2 ωt
kuh (t) − u(t)kL2 ≤ Ch e
Γ0t ∪Γ∞
t
|etz |
|dz| ku0kḢ 2 ,
|z − ω|
SOLUTION OF A FRACTIONAL ORDER EVOLUTION EQUATION
19
and, since |z| ≥ cβ |z − ω| on Σωβ , the result stated follows in this case
from
Z β
Z ∞ −cst
Z
Z
|ezt |
e
|ezt |
|dz| ≤ C
|dz| ≤ C
ds ≤ C.
dθ ≤ C and
|z|
s
−β
Γ∞
1/t
Γ0t |z|
t
To treat the term in fb, we interpolate between (3.6) and (3.2) to obtain
Ch2
ν
kGh (z)vkL2 ≤
, for z ∈ Σωβ ,
(1
+
|z|)
kvk
2σ
Ḣ
(1+α)σ+ν
(1 + |z|)
cf. (2.7), and hence, since (1 + α)σ + ν ≥ 1 + α,
Ch2 b
kfkḢ 2σ ,ν,Σω , for z ∈ Σωβ .
|z|α kGh (z)fb(z)kL2 ≤
β
|z|
In the same way as above this shows the result stated for u0 = 0.
For the purpose of application to the analysis of our third time discretization method we next show a classical type smooth data estimate
that does not use fb(z).
Theorem 3.3. Let uh (t) and u(t) be the solutions of (1.38) and (1.37),
respectively, with u0h = Ph u0 . Then
Z t
2
kut (s)kḢ 2 ds , for t > 0.
(3.7) kuh (t) − u(t)kL2 ≤ Ch ku0 kḢ 2 +
0
Proof. Writing uh − u = (uh − Rh u) + (Rh u − u) =: ϑ + % we have,
using again kRh v − vk ≤ Ch2 kvkH 2 ,
Z t
2
2
k%(t)kL2 ≤ Ch ku(t)kḢ 2 ≤ Ch ku0 kḢ 2 +
kut (s)kḢ 2 ds .
0
Further, one easily finds
∂t ϑ − ∂t−α ∆h ϑ = −Ph %t ,
for t > 0,
and hence, using Duhamel’s principle (1.11) and the stability of Eh (t),
Z t
kϑ(t)kL2 ≤ C kϑ(0)kL2 +
k%t (s)kL2 ds
0
Z t
kut (s)kḢ 2 ds .
≤ Ch2 ku0 kḢ 2 +
0
The integral on the right in (3.7) is finite under smoothness assumptions that do not require f (t) to vanish on ∂Ω for t > 0. In fact, for
0 < α < 1, it follows from the regularity result [11, Theorem 2.4] (an
improved version of [13, Theorem 5.6]) that, if u0 = 0, then
Z t
kut (s)kḢ 2 ds ≤ C t(1+α)σ−α kf (0)kḢ 2σ
0
+
2 Z
X
j=0
0
t
s
j−α
k∂tj+1 f (s)kL2
ds ,
if σ > α/(1 + α).
20
W. MCLEAN AND V. THOMÉE
The following alternative regularity result admits −1 < α ≤ 0.
Lemma 3.1. Let −1 < α < 1 and u0 = 0. Then, for σ > α/(1 + α),
Z t
Z t
(1+α)σ−α
kf (0)kḢ 2σ +
kut (s)kḢ 2 ds ≤ Ct
kft (s)kḢ 2σ ds .
0
0
Proof. By Duhamel’s principle (1.11) we have
Z
Z t
d t
E(τ )f (t − τ ) dτ = E(t)f (0) +
E(τ )ft (t − τ ) dτ,
ut (t) =
dt 0
0
and hence, with A = −∆,
Z t
Aut (t) = AE(t)f (0) +
AE(τ )ft (t − τ ) dτ.
0
Using (1.12) (with σ replaced by 1 − σ and u0 by Aσ u0 ) this shows
Z t
−(1+α)(1−σ)
kf (0)kḢ 2σ +C
kut (t)kḢ 2 ≤ Ct
τ −(1+α)(1−σ) kft (t−τ )kḢ 2σ dτ.
0
Replacing t by s and integrating we obtain, since (1 + α)(1 − σ) < 1,
Z t
kut (s)kḢ 2 ds ≤ Ct1−(1+α)(1−σ) kf (0)kḢ 2σ
0
Z t
Z t
−(1+α)(1−σ)
+C
τ
kft (s − τ )kḢ 2σ ds dτ,
0
τ
which is bounded as stated.
We note that if α < 0 the inequality in Lemma 3.1 holds with σ = 0.
Further, if 0 ≤ α < 1/3, then α/(1+α) < 1/4, and we may thus choose
σ < 1/4, so that boundary conditions on f (t) will not be required.
4. Discretization in both time and space
In this section we analyze the error in the fully discrete methods
obtained by applying our three time discretization methods to the spatially semidiscrete problem (1.38), or, equivalently, (1.39). The fully
discrete solution UN,h (t) obtained by application of our first method
(1.19) to (1.39), with u0h = Ph u0 , is thus defined by
(4.1)
UN,h (t) :=
N
k X zj t
e wh (zj ) zj0 ,
2πi j=−N
wh (z) = Ebh (z)Ph g(z).
To find UN,h (t) for a range of values of t it is now required to solve the
2N + 1 discrete elliptic problems, with |j| ≤ N,
(4.2) zj1+α wh (zj ), χ + ∇wh (zj ), ∇χ = zjα (g(zj ), χ , ∀ χ ∈ Vh .
As before, these problems may be solved in parallel.
Since the triangle inequality gives
kUN,h (t) − u(t)k ≤ kUN,h (t) − uh (t)k + kuh (t) − u(t)k,
SOLUTION OF A FRACTIONAL ORDER EVOLUTION EQUATION
21
combining Theorem 2.1 (with Ah playing the role of A) and Theorem 3.1, we immediately obtain the following error bound for the fully
discrete method.
Theorem 4.1. Let u(t) be the solution of (1.37), and, under the assumptions and with the notation of Theorem 2.1, let UN,h (t) be the
approximate solution defined by (4.1). Then we have, for t0 ≤ t ≤ T ,
with C = Cδ,r,β,t0,T ,
b L ,Σω .
kUN,h (t) − u(t)kL2 ≤ C(h2 + `(ρN)e−µN ) ku0 kL2 + kfk
2 β
Applying the modified time discretization method (1.28) to the spatially semidiscrete problem (1.38), again with u0h = Ph u0 , we obtain
a different fully discrete solution, namely, with wh0 (zj ) = wh (zj ) −
zj−1 Ph g(zj ),
(4.3)
0
UN,h
(t)
N
k X zj t 0
:= Ph F (t) +
e wh (zj ) zj0 .
2πi j=−N
Using Theorem 2.2 we now have the following estimate for the error in
the discretization in time of the spatially semidiscrete problem (1.38).
This estimate may √then be combined with Theorem 3.2 to obtain a
complete O(h2 + e− r̄γN ) error estimate for the fully discrete solution.
This result will require a condition on the triangulations Th underlying
the finite element spaces Vh .
Theorem 4.2. Let uh (t) be the solution of (1.37), and assume that
the Th are such that
(4.4)
kAσh Ph vkL2 ≤ CkAσ vkL2 ,
for v ∈ D(Aσ ),
with 0 < σ ≤ 1.
0
Under the hypotheses of Theorem 2.2, let UN,h
(t) be defined by (4.3).
Then, if (1 + α)σ0 + ν ≥ (1 + α)σ = γ, we have, with C = Cδ,r,β,σ,σ0 ,
(4.5)
√
0
kUN,h
(t) − uh (t)kL2 ≤Cγ −1 T γ eωt e− r̄γN ku0kḢ 2σ
b 2σ0 ω , for 0 ≤ t ≤ T,
+ kfk
Ḣ
,ν,Σ
β
We make some remarks concerning condition (4.4). We first note
that in the case that the triangulations Th form a quasiuniform family,
then, as is easily seen, (4.4) holds with σ = 1.
We now recall from [3] that, under certain conditions on the Th ,
weaker than quasiuniformity, Ph is stable in H01 . More precisely, for
τ0 ∈ Th , let Qj (τ0 ) denote the set of triangles which are “j triangles
away from τ0 ”, and let nj (τ0 ) be the number of triangles in Qj (τ0 ).
Assume, for some α̃ ≥ 1, β̃ ≥ 1 (if α̃ > 1 we may choose β̃ = α̃4 ),
hτ /hτ0 ≤ C α̃j ,
nj (τ ) ≤ C β̃ j ,
for τ ∈ Qj (τ0 ), ∀τ0 ∈ Th .
√ √
Then Ph is stable in H01 if α̃β̃γ̃ 1/2 < 1, where γ̃ = 3− 2 ≈ .318. With
the pessimistic choice β̃ = α̃4 , this shows (4.4) for α̃ < γ̃ −1/10 ≈ 1.12,
22
W. MCLEAN AND V. THOMÉE
which still permits serious non-quasiuniformity. In this case, (4.4) holds
with σ = 1/2. In fact,
1/2
kAh Ph vk2L2 = (Ah Ph v, Ph v) = k∇Ph vk2L2 ≤ Ck∇vk2L2 = CkA1/2 vk2L2 .
By interpolation between this inequality and kPh vkL2 ≤ kvkL2 one
finds that (4.4) holds for 0 ≤ σ ≤ 1/2. In particular, since H s = Ḣ s =
D(As/2 ) for 0 ≤ s < 1/2, this means that (4.5) applies if fb(z) ∈ H 2σ0
on Σωβ , with 0 < σ0 < 1/4, thus not requiring fb(z) = 0 on ∂Ω, provided
ν ≥ (1 + α)( 12 − σ0 ).
In one space dimension, the stability of Ph in H01 holds for any α̃ < 2,
which is a very weak condition on the partitions.
We now turn to the third method, applying (1.34) to (1.37), or taking
(4.6)
N
X
eN,h (t) := Ph F (t) + k
U
w
eh (zj , t)zj0 ,
2πi j=−N
where w
eh (zj , t) = wh (zj , t) − zj−1 Ph g(zj , t), with wh (zj , t) the solutions
of the obvious modifications of the elliptic finite element equations
(4.2). For this method, Theorem 2.3 gives the following bound.
Theorem 4.3. Let uh (t) be the solution of (1.37), and under the aseN,h (t) be defined by (4.6). Then, if
sumptions of Theorem 4.2, let U
−1
σ0 + (1 + α) ≥ σ, we have, with C = Cδ,r,β̄,σ,σ0 ,
√
eN,h (t)−uh (t)kL ≤ Cγ −1 T γ e− r̃γN ku0 k 2σ
kU
2
Ḣ
Z t
+ kf (0)kḢ 2σ0 +
kft (s)kḢ 2σ0 ds , for 0 ≤ t ≤ T.
0
We note that, by the above, no boundary conditions on f or ft are
required if σ0 < 1/4. If α ≥ 0, we may choose σ = 1, σ0 = 0, and,
for any α ∈ (−1, 1), we have (1 + α)−1 > 1/2, so that we may take
σ = 1/2, σ0 = 0. Combination
of Theorem 4.3 with Theorem 3.3
√
2
− r̄γN
) error estimate, uniformly down to t = 0,
then yields a O(h + e
without artificial boundary conditions on f .
5. Numerical experiments
5.1. A scalar problem. To see the effect of discretizing in time only,
we consider a problem in which B = C, namely
(5.1)
∂t u + ∂t−α au = f (t),
for t > 0,
with u(0) = u0 ,
for a scalar a > 0. The exact solution
P∞mayk be expressed in terms of
the Mittag–Leffler function Eµ (x) = k=0 x /Γ (1 + kµ); in fact,
Z t
1+α
(5.2)
u(t) = E1+α (−at ) +
E1+α (−as1+α )f (t − s) ds.
0
SOLUTION OF A FRACTIONAL ORDER EVOLUTION EQUATION
23
ω = 0.0, δ = 0.1541
ω = 2.0, δ = 0.3812
r = 0.1387
r = 0.3431
−µN
N
error
`(ρN)e
error
`(ρN)e−µN
10 4.50e-02 2.88e+00 1.95e-01 3.03e-01
20 2.01e-03 8.86e-01 5.73e-05 1.24e-02
30 2.68e-03 2.82e-01 9.18e-05 5.29e-04
40 4.49e-04 9.08e-02 2.21e-06 2.29e-05
60 3.92e-05 9.62e-03 1.07e-09 4.42e-08
80 1.79e-06 1.03e-03 1.01e-13 8.68e-11
100 6.76e-09 1.12e-04 1.38e-15 1.73e-13
120 8.81e-09 1.22e-05 8.59e-16 3.45e-16
Table 1. Absolute error in UN (t) at t = 2.0 using two
different contours.
We take α = −1/2, because in this case the Mittag–Leffler function can
be expressed in terms of the complementary error function, E1/2 (−x) =
2
ex cerf(x), and is easily evaluated with the help of the function DERFCX
from the specfun library [2]. The substitution s = ty 2 then yields the
formula
Z 1
√
√
u(t) = E1/2 (−a t) +
E1/2 (−a t y)f (t − ty 2)2ty dy,
0
in which the integrand is a smooth function of y for any smooth f (t),
allowing accurate evaluation via Gauss–Legendre quadrature.
We applied each of our three methods to the problem (5.1) with
a = 1, taking as the initial data and the inhomogeneous term
u0 = 1 and f (t) = e−t cos πt.
Our choice of f (t) makes the problem somewhat challenging because
b = (z + 1)/((z + 1)2 + π 2 ) has poles at z =
the Laplace transform f(z)
−1 ± iπ, forcing β < π/2 + arctan((1 + ω)/π).
Table 1 shows the absolute values of the error at t = 2.0 for the approximation UN (t) defined in (1.19), where w is now the scalar function
w(z) = z α (z 1+α + a)−1 g(z), with two choices of the set of parameters
ω, δ and r. The integration contour was constructed as in Theorem 2.1
with θ = 0.1 and [t0 , T ] = [0.5, 5.0]. The table also shows the factor
`(ρN)e−µN that occurs in our theoretical error bound. For N = 10
the results are better with ω = 0, but for larger N we observe faster
convergence with ω = 2, due to the larger allowable value of r.
Table 2 gives results for our other two methods. In this example,
0
eN (t) because the integration
UN (t) is generally less accurate than U
contour for the latter is not constrained by the poles of fb(z), allowing
24
W. MCLEAN AND V. THOMÉE
ω = 1.0, δ = 0.2835
ω = 0.0, δ = 0.7854
r = 0.2551
r = 0.7069
√
√
0
−1 γ ωt − r̄γN
eN γ −1 T γ e− r̄γN
N error in UN γ T e e
error in U
10 1.14e-02
1.95e+00
1.06e-02
4.02e-02
20 5.08e-04
6.03e-01
1.25e-03
5.70e-03
40 3.65e-04
1.15e-01
6.01e-05
3.61e-04
60 1.42e-04
3.22e-02
5.71e-06
4.34e-05
80 1.22e-05
1.10e-02
7.93e-07
7.28e-06
100 2.90e-06
4.28e-03
1.36e-07
1.51e-06
120 2.19e-06
1.82e-03
2.86e-08
3.64e-07
160 6.97e-07
3.99e-04
1.71e-09
2.91e-08
200 9.32e-08
1.05e-04
1.48e-10
3.15e-09
eN (t) at t = 2.0
Table 2. Absolute error in UN0 (t) and U
using two different contours.
Figure 2. Absolute errors in UN (t) and UN0 (t) for N = 100.
a larger value for r. In other computations, we observed little difference
eN (t) when using common values
between the accuracy of UN0 (t) and U
of ω, δ and r.
Figure 2 shows how the absolute errors |UN (t) − u(t)| and |UN0 (t) −
u(t)| depend on t for the case N = 100. Note the logarithmic scale
on the vertical axis and the range 0 ≤ t ≤ 1.0 on the horizontal axis.
SOLUTION OF A FRACTIONAL ORDER EVOLUTION EQUATION
25
ω = 0.0, δ = 0.7854, r = 0.7069
θ = 0.1
θ = 1/N
−µN
N
error
`(ρN)e
error
`(ρN)e−µN
10 1.52e-04 4.28e-03 1.52e-04 4.28e-03
20 2.98e-06 3.11e-06 4.68e-06 8.59e-06
30 2.30e-07 2.37e-09 2.98e-08 2.67e-08
40 2.31e-08 1.85e-12 1.72e-09 1.06e-10
60 7.34e-10 1.16e-18 1.45e-12 2.67e-15
80 1.36e-09 7.52e-25 3.11e-15 1.01e-19
100 8.80e-09 4.92e-31 7.77e-16 5.10e-24
120 1.79e-07 3.25e-37 8.33e-16 3.19e-28
140 4.92e-06 2.16e-43 7.22e-16 2.36e-32
160 8.50e-04 1.45e-49 7.77e-16 2.02e-36
Table 3. Absolute error in a modified version of UN (t)
at t = 2.0 using two different choices of θ, for a contour
b
passing to the left of the poles of f(z).
We chose [t0 , T ] = [0.5, 5.0], with the values of ω, δ and r as in the left
half of Table 2. As expected, for t ≥ t0 we observe that UN (t) is more
accurate than UN0 (t), but for t close to zero the latter solution gives
better accuracy. Notice how |UN0 (t)−u(t)| changes abruptly near t = 0.
Closer investigation revealed that this error drops from 2.75 × 10−4
at t = 0 to 2.31 × 10−6 at t = 4 × 10−6 , perhaps because of the
factor e−λt sin(δ+η) cosh ξ that occurs in (2.9) and whose influence is not
captured by our error bound.
In Table 3 we present results using a contour that passes to the left of
the poles of fb(z), using a modified version of UN (t) that incorporates
the residues at z = −1 ± iπ, following the representation (2.11). In
the left column we list the errors using the fixed value θ = 0.1, and
observe that these errors grow for N ≥ 60. A perturbation analysis
similar to the one discussed following Theorem 2.1 explains why the
roundoff errors grow exponentially with N; for details, see [9]. In the
right column, taking θ = 1/N, the errors become much smaller for
larger values of N, reaching the order of the machine precision when
N = 100.
5.2. Two-dimensional problems. We take A = −∆ on the square
Ω = (0, 4) × (0, 4) with homogenous Dirichlet boundary conditions. As
in the scalar example, we choose α = −1/2, θ = 0.1, [t0 , T ] = [0.5, 5.0].
To triangulate the spatial domain Ω, we first construct a uniform square
grid and then bisect each square along its north-west to south-east
26
W. MCLEAN AND V. THOMÉE
ω
δ
r
N
20
30
40
60
80
120
1.0000
0.2835
0.2551
1.0000
0.2835
0.2551
method 1
1.2543e-02
6.1977e-03
2.4728e-04
5.0109e-04
4.8512e-04
4.8519e-04
method 2
6.2889e-03
6.1683e-03
2.7850e-03
3.2581e-04
4.6280e-04
4.9304e-04
0.0000
0.7854
0.7069
method 3
4.1395e-03
4.6533e-04
2.6436e-04
4.6450e-04
4.8232e-04
4.8509e-04
0
eN,h (t) at t = 2.0
Table 4. Errors in UN,h (t), UN,h
(t), U
for a 50 × 50 grid.
diagonal. The regular structure of the mesh allows us to apply (4.4)
with σ = 1, and also to handle the elliptic problems using a fast Poisson
solver.
Table 4 shows results for a 50 × 50 grid when the initial data and
the inhomogeneous term are of the form
u0 (x) = φ11 (x) − φ21 (x),
where φjk (x) = sin(jπx1 /4) sin(kπx2 /4),
1
f (x, t) = e−t/2 cos t φ11 (x) + e−t cos πt φ21 (x);
2
notice that the φjk are eigenfunctions of the Laplacian. The exact
solution is u(x, t) = u11 (t)φ11 (x) + u21 (t)φ21 (x) where u11 (t) and u21 (t)
have similar forms to the solution (5.2) of the scalar problem. Table 4
0
gives the discrete `2 -error in the nodal values of UN,h (t), UN,h
(t) and
e
UN,h (t) at t = 2.0, and also shows the contour parameters used. As
in the scalar case, method 3 allows use of a more advantageous value
of r because the poles of fb(·, z) do not constrain the choice of Γ. The
table shows that in this instance we achieve comparable accuracy to
the semi-discrete solution uh (t) by taking N equal to about 40, 80 and
30 for methods 1, 2 and 3, respectively.
Finally, Table 5 shows the results obtained for a 100 × 100 grid using
u0 = φ11 and f (x, t) = e−t/4 , again taking the discrete `2 -error at
t = 2.0. For our reference solution, we used method 1 with N = 120,
solving each elliptic problem with an accuracy of O(h4) by performing
b z) = 1/(z + 1 ) has no
one step of Richardson extrapolation. Since f(x,
4
singularities off the real axis, we used for all three methods the values of
ω, δ and r shown in final column of Table 4. The accuracy of method 1
is striking: with N = 20 the error from the time discretization is already
much smaller than the error from the spatial discretization, compared
SOLUTION OF A FRACTIONAL ORDER EVOLUTION EQUATION
N
10
20
30
60
80
100
method 1
2.3995e-03
6.9963e-05
7.2634e-05
7.2623e-05
7.2623e-05
7.2623e-05
27
method 2
9.8575e-02
2.1067e-02
5.6638e-03
1.4630e-04
8.9950e-05
7.4365e-05
method 3
8.3087e-02
9.5705e-03
1.9222e-03
1.1144e-04
7.7738e-05
7.3500e-05
0
eN,h (t) at t = 2.0
Table 5. Errors in UN,h (t), UN,h
(t), U
−t/4
for a 100 × 100 grid with f (x, t) = e
.
with N = 80 for methods 2 and 3. Of course, for t sufficiently close to
zero method 1 would be less accurate than methods 2 and 3, as for the
scalar case illustrated in Figure 2.
Note that the inhomogenous term f (x, t) = e−t/4 does not vanish
on ∂Ω, so kf (·, t)kḢ 2σ0 < ∞ if and only if σ0 < 1/4. Nevertheless, with
σ0 < 1/4, our error bounds in Theorems 4.2 and 4.3 apply with σ = 1,
taking ν ≥ (1 − σ0 )(1 + α) = 12 (1 − σ0 ) in Theorem 4.2.
References
[1] N. Yu. Bakaev, V. Thomée, and L. B. Wahlbin, Maximum-norm estimates
for resolvents of elliptic finite element operators, Math. Comp., 72 (2003),
1597-1610.
[2] W. J. Cody, Algorithm 715: specfun — a portable Fortran package of special
function routines and test drivers, ACM Trans. Math. Software, 19 (1993),
22–32 (http://www.netlib.org/specfun/).
[3] M. Crouzeix and V. Thomée, The stability in Lp and Wp1 of the L2 -projection
onto finite element function spaces, Math. Comp., 48 (1987), 521–532.
[4] I. P. Gavrilyuk and V. L. Makarov, Exponentially convergent algorithms for the
operator exponential with applications to inhomogeneous problems in Banach
spaces, SIAM J. Numer. Anal., 43 (2005), 2144–2171.
[5] R. Gorenflo, F. Mainardi, D. Moretti and P. Paradisi, Time fractional diffusion:
a discrete random walk approach, Nonlinear Dynamics 29 (2002), 129–143.
[6] B. I. Henry and S. L. Wearne, Fractional reaction-diffusion, Physica A 276
(2000), 448–455.
[7] T. A. M. Langlands and B. I. Henry, The accuracy and stability of an implicit solution method for the fractional diffusion equation, J. Comp. Phys.
205 (2005), 719–736.
[8] M. López-Fernandez and M. Palencia, On the numerical inversion of the
Laplace transform of certain holomorphic mappings, Appl. Numer. Math. 51
(2004), 289–303.
[9] M. López-Fernandez, C. Palencia and A. Schädle, A spectral order method
for inverting sectorial Laplace transforms, SIAM J. Numer. Anal. 44 (2006),
1332–1350.
[10] C. Lubich, I.H. Sloan, and V. Thomée, Nonsmooth data error estimates for
approximations of an evolution equation with a positive type memory term,
Math. Comp. 65 (1996), 1–17.
28
W. MCLEAN AND V. THOMÉE
[11] W. McLean and K. Mustapha, A second-order accurate numerical method for
a fractional wave equation, Numer. Math. 105 (2007), 481–510.
[12] W. McLean, I. H. Sloan, and V. Thomée, Time discretization via Laplace transformation of an integrodifferential equation of parabolic type, Numer. Math.
102 (2006), 497–522.
[13] W. McLean and V. Thomée, Numerical solution of an evolution equation with
a positive type memory term, J. Austral. Math. Soc. Ser. B. 35 (1993), 23–70.
[14] W. McLean, V. Thomée and L. B. Wahlbin, Discretization with variable time
steps of an evolution equation with a positive-type memory term, J. Comput.
Appl. Math., 69, 49–69 (1996).
[15] W. McLean and V. Thomée, Time discretization of an evolution equation via
Laplace transforms, IMA J. Numer. Anal. 24 (2004), 439–463.
[16] R. Metzler and J. Klafter, The random walk’s guide to anomalous diffusion: a
fractional dynamics approach, Physics Reports 339 (2000), 1–77.
[17] A. Pani and G. Fairweather, An H 1 -Galerkin mixed finite element method
for an evolution equation with a positive type memory term, SIAM J. Numer.
Anal., 40, 1475–1490 (2002).
[18] A.Pazy, Semigroups of Linear Operators and Applications to Partial Differential Equations, Springer-Verlag, New York - Berlin - Heidelberg - Tokyo,
1983.
[19] M. J. Sanz-Serna, A numerical method for a partial integro-differential equation, SIAM J. Numer. Anal., 25, 319–327 (1988).
[20] A.H. Schatz and L.B. Wahlbin, On the quasi-optimality in L∞ of the H 1 projection into finite element spaces, Math. Comp. 38 (1982), 1–22.
[21] W. R. Schneider and W. Wyss, Fractional diffusion and wave equations, J.
Math. Phys. 30 (1989), 134–144.
[22] D. Sheen, I. H. Sloan and V. Thomée, A parallel method for time-discretization
of parabolic equations based on contour integral representation and quadrature,
Math. Comp. 69 (1999), 177–195.
[23] D. Sheen, I. H. Sloan and V. Thomée, A parallel method for time-discretization
of parabolic equations based on Laplace transformation and quadrature, IMA
J. Numer. Anal. 23 (2003), 269–299.
[24] B. Stewart, Generation of analytic semigroups by strongly elliptic operators,
Trans. Amer. Math. Soc. 199 (1974), 141–161.
[25] J. A. C. Weideman, Optimizing Talbot’s contours for the inversion of the
Laplace transform, SIAM J. Numer. Anal. 44 (2006), 2342–2362.
[26] S. B. Yuste and L. Acedo, An explicit finite difference method and a new von
Neumann-type stability analysis for fractional diffusion equations, SIAM J.
Numer. Anal. 42 (2005), 1862–1874.
[27] S. B. Yuste, L. Acedo and K. Lindenberg, Reaction front in A + B → C
reaction-subdiffusion process, Physical Review E 69, 036126 (2004).
School of Mathematics and Statistics, The University of New South
Wales, Sydney 2052, Australia
E-mail address: w.mclean@unsw.edu.au
Department of Mathematics, Chalmers University of Technology,
S-41296 Göteborg, Sweden
E-mail address: thomee@math.chalmers.se