Seafloor electromagnetic induction studies in the Bay of Bengal
advertisement

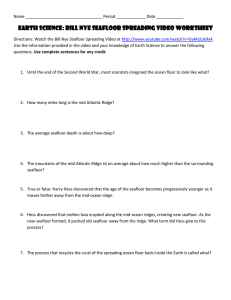
Marine Geophysical Researches 21: 1–21, 2000. © 2000 Kluwer Academic Publishers. Printed in the Netherlands. 1 Seafloor electromagnetic induction studies in the Bay of Bengal E. John Joseph1,∗ , H. Toh1 , H. Fujimoto1, R.V. Iyengar2 , B.P. Singh2 , H. Utada3 & J. Segawa4 1 Ocean Research Institute, The University of Tokyo, Japan; 2 Indian Institute of Geomagnetism, Mumbai-5, India; The University of Tokyo, Japan; 4 Institute of Oceanic Research and Development, Tokai University, Japan 3 Earthquake Reaearch Institute, Received 8 December 1998; accepted 27 October 1999 Key words: Electromagnetic induction, ocean bottom magnetometer, 85◦ E ridge, Ninety East ridge, geomagnetic depth sounding, vertical gradient sounding, thin-sheet modelling, 3-D forward modelling Abstract Seafloor magnetometer array experiments were conducted in the Bay of Bengal to delineate the subsurface conductivity structure in the close vicinity of the 85◦ E Ridge and Ninety East Ridge (NER), and also to study the upper mantle conductivity structure of the Bay of Bengal. The seafloor experiments were conducted in three phases. Array 1991 consisted of five seafloor stations across the 85◦ E Ridge along 14◦ N latitude with a land reference station at Selam (SLM). Array 1992 also consisted of five seafloor stations across 85◦ E Ridge along 12◦ N latitude. Here we used the data from Annamalainagar Magnetic Obervatory (ANN) as land reference data. Array 1995 consisted of four seafloor stations across the NER along 9◦ N latitude with land reference station at Tirunelveli (TIR). OBM-S4 magnetometers were used for seafloor measurements. The geomagnetic Depth Sounding (GDS) method was used to investigate the subsurface lateral conductivity contrasts. The vertical gradient sounding (VGS) method was used to deliniate the depth-resistivity structure of the oceanic crust and upper mantle. 1-D inversion of the VGS responses were conducted and obtained a 3-layer depth-resistivity model. The top layer has a resistivity of 150–500 m and a thickness of about 15–50 km. The second layer is highly resistive (2000–9000 m) followed by a very low resistive (0.1–50 m) layer at a depth of about 250–450 km. The 3-component magnetic field variations and the observed induction arrows indicated that the electromagnetic induction process in the Bay of Bengal is complex. We made an attempt to solve this problem numerically and followed two approaches, namely (1) thin-sheet modelling and (2) 3-D forward modelling. These model calculations jointly show that the observed induction arrows could be explained in terms of shallow subsurface features such as deep-sea fans of Bay of Bengal, the resistive 85◦ E Ridge and the sea water column above the seafloor stations. VGS and 3-D forward model responses agree fairly well and provided depth-resistivity profile as a resistive oceanic crust and upper mantle underlained by a very low resistive zone at a depth of about 250–400 km. This depth-range to the low resistive zone coincide with the seismic low velocity zone of the northeastern Indian Ocean derived from the seismic tomography. Thus we propose an electrical conductivity structure for the oceanic crust and upper mantle of the Bay of Bengal. Introduction Electromagnetic (EM) induction produces current flow inside the earth on a global scale. The source field for this is the current outside the earth, in the ionosphere and beyond in the magnetosphere. EM waves penetrate inwards (according to the skin-depth rule) as deep as the lower mantle. Attenuation of the diffusing wave and the current induced by it is de∗ Present address: Geological Survey of Japan, 1-1-3 Higashi, Tsukuba, Japan 305. E-mail: john@gsj.go.jp pendent on the electrical conductivity of the earth. It is possible to investigate conductivity variations as a function of depth by measuring magnetic field at the earth’s surface. The magnetic field measured at the earth’s surface includes contributions from external (inducing) and internal (induced) currents. Exact separation into parts of external and internal origin is difficult. Schmucker (1970) suggested that instead of separating the field into external and internal parts, one can study the subsurface conductivity structure by separating the field into normal and anomalous 2 parts. The normal part by definition is the vector sum of the external field and the field from currents in a laterally uniform earth. However, the exercise needs data from an array of magnetometers recording three components of the magnetic field. Recent development in theory, methodology, instrumentation and marine geology have spawned increasing interest in the area of EM methods for seafloor exploration. Many of the seafloor EM techniques are the adaptation of terrestrial (land) methods such as magnetovatiational (MV) and magnetotelluric (MT) soundings. The land areas are in direct contact with a near insulator, the atmosphere, which allows the nearly instantaneous propagation of EM signals with limited attenuation. On the contrary, at seafloor the overlying highly conducting seawater column acts as a low pass filter, i.e., the high frequency EM signals get attenuated depending on the thickness of sea-water column. Two competing sources of EM field are present in the oceans: the ionospheric source which propagate through the ocean and the underlying lithosphere, as if the ocean were static; and secondly, the motion of sea-water through earth’s static magnetic field produces an electric field of dynamo action. At periods longer than a day, the energy spectrum of ocean sources dominate the observed EM field. As a result, seafloor MV and MT response functions are band limited and restricted to 2-3 decades of period. When analysing the seafloor EM data, the tidal periods should also be filtered out. Major seafloor EM experiments were conducted in Pacific Ocean jointly by various research groups from many nations. EMSLAB (EMSLAB group, 1988), EMRIDGE (Heinson et al., 1993) and MELT (Chave et al., 1996) are famous among them. Other seafloor EM experiments include Tasman Project of Seafloor Magnetotelluric Exploration by Australian researchers (Lilley et al., 1989) and seafloor EM experiments conducted every year from 1986 through 1992 in the vicinity of of Japanese Island-Arc System by Japanese scientists (Segawa and Toh, 1992; Toh and Segawa, 1995). In Atlantic Ocean the seafloor EM studies were conducted by various groups (e.g., Poehls and von Herzen, 1976; Shneyer et al., 1991). In Indian Ocean region, seafloor EM experiments were conducted around the Indian peninsula by Indian researchers (e.g., Iyengar et al., 1992a,b; Joseph et al., 1995). In the present study we report the seafloor EM experiments conducted in the Bay of Bengal, northeastern Indian Ocean. The Bay of Bengal in the northeastern Indian Ocean is a geologically complex region with deep-sea fans, submarine canyons, subduction zones and the aseismic ridges namely the 85◦ E Ridge and Ninety East Ridge (NER). The 85◦ E Ridge is fully buried under the thick sedimentary deposits whereas the NER topography could be traced up to 10◦ N latitude. Towards the North the NER plunges beneath the thick sedimentary deposits. Though both these ridges are believed to be of hot spot origin (Morgan, 1978; Curray and Munasinge, 1991) they show distinctly different free-air gravity anomaly; the 85◦ E Ridge shows negative anomaly while NER shows positive anomaly (Liu et al., 1982; Chaubey et al., 1991; Sandwell and Smith, 1997). Though the hot spot origin and tectonics of the NER is fairly established (e.g., Curray et al., 1982), controversies still exist regarding the origin and extension of the 85◦ E Ridge (e.g., Muller et al., 1993, Storey, 1995; Ramana et al., 1997). The simplest explanation for the gravity being low over the 85◦ E Ridge is that the ridge is less dense than the adjacent region. However strong magnetic signals over the northern parts of the ridge is observed (e.g., Chaubey et al., 1991; Ramana et al., 1997). The unusual geophysical properties observed over the 85◦ E Ridge may point to the geothermal state of its subsurface. The geothermal state has a profound effect on the geoelectrical conductivity. The EM method has been proven to be a powerful tool in mapping subsurface electrical conductivity structures. Generally oceanic crustal materials are considered to be less conductive. If a subsurface conductivity anomaly associated with the 85◦ E Ridge is present, the induced current in the Bay of Bengal crust by the transient geomagnetic field variations may get concentrated through the ridge. On the other hand, if the ridge is resistive, the induced currents will avoid flowing through it. These two situations will produce distinctly different signatures in the records of geomagnetic field variations at the seafloor across the ridge. In the study reported here, arrayed seafloor magnetometer measurements were conducted to deliniate the subsurface electrical conductivity structure in the close vicinity of the 85◦ E Ridge and NER, and also to understand the geoelectrical structure of the oceanic crust and upper mantle of the Bay of Bengal. 3 Figure 1. Station locations with detailed bathymetery of the Bay of Bengal. Sea water depths are labelled in meters (created using ETOPO5 elevation and depth data set). 4 Experiments and instrumentation The deployment of ocean bottom magnetometers (OBMs) were conducted in three phases, and the station locations are shown in Figure 1. These sites were selected with respect to a seismo-geological map of the Bay of Bengal prepared by the Oil and Natural Gas Corporation of India (personnel communication). Array 1991 consisted of five seafloor stations across the 85◦ E Ridge along 14◦ N latitude with a land reference station at Selam (SLM). The seafloor sites were selected such that BYB 5 and BYB 8 were on the western and eastern flanks of the 85◦ E Ridge, while BYB 6 and BYB 7 were over the ridge. BYB 9 was selected to be remote from both the 85◦ E Ridge and Ninety East Ridge (NER). Simultaneous data were collected for a period of 12 days in March 1991. Array 1992 also had five seafloor stations across the 85◦ E Ridge along 12◦ N latitude. Here the station BYB 10 was near the eastern continental margin of India, BYB 12 and BYB 14 were over the western and eastern flanks of the 85◦ E Ridge, and BYB 13 right over the ridge. BYB 11 was between the eastern continental margin of India and the 85◦ E Ridge and remote from both the places. Simultaneous data were collected for a period of 16 days in February–March 1992, and data from the permanent magnetic observatory Annamalinagar (ANN) was used as the land reference. Array 1995 consisted of four seafloor stations across the NER along 9◦ N latitude. Here the station BYB 15 was very close to the northern extension of Sunda Arc and the Andaman and Nicobar island chain. BYB 16 and BYB 17 were right over the NER, while BYB 18 was on the western side of NER with a land reference station at Tirunelveli (TIR). Simultaneous data were collected for a period of 12 days in March 1995. Details of station locations and recorded data are given in Table 1. Seafloor stations of the above three arrays together covered an east-west profile across the entire Bay of Bengal. OBM-S4 magnetometers (Segawa et al., 1986) were used for seafloor measurements. It is basically a fluxgate magnetometer with low temperature drift and sensitivity of 0.1 nT. Data were collected at a sampling interval of one minute (two minutes in the case of array 1995) using a Z-80 microprocessor-based system and stored in EPROM cards. Each EPROM card has a capacity of 128 K bytes, and can store up to one month of three-component magnetic data with one minute sampling intervals. Lowering of the OBMs were carried out by free falling from the sea surface, after the sites of deployment were accurately located using the Global Positioning System (GPS). Recovery of the instruments from the seafloor were conducted by an onboard acoustic release system. In array 1991, deployment and retrieval of OBMs were carried out from aboard R.V. Samudra Manthan of Geological Survey of India. For array 1992 and array 1995, the same were conducted from aboard O.R.V. Sagar Kanya of Department of Ocean Development, Government of India. Data analysis and results The OBM assembly settles at the seafloor in a random orientation, but upright because of the weight attached with it. Since the sensor assembly is mounted on a gimbal, the horizontal sensors are oriented in a horizontal plane while the vertical sensor is oriented in a vertical plane. The vertical sensor thus measures the field directly, while the two horizontal sensors are in a direction orthogonal to each other but at a random orientation with respect to geographic north and east. Since the system measures the values of ambient field components, the values recorded during the quiet periods in nighttime can be used in conjunction with model values from International Geomagnetic Reference Field (IGRF) to estimate the orientation of the two horizontal sensors (Joseph et al., 1995). After applying the geographical corrections, selected data were first plotted for visual examination. The area under consideration is an equatorial region and hence for the day-time events, the presence of equatorial electrojet leads to non-uniform source fields. This puts restriction on the use of day-time data in the analysis, as all the conventional approaches presuppose the source field to be uniform. Hence we selected local night-time data and got 6–8 moderate events for each array. Figure 2 shows the stack plots of one of the local nighttime events recorded simultaneously for each array (i.e., for array 1991, array 1992 and array 1995). Data from BYB 8 (array 1991), BYB 12 (array 1992), BYB 16 and TIR (array 1995) were found noisy and could not be used for analysis. Visual examination Visual examination of the time series and the enlarged portions of them (Figure 2) reveal improtant features of the data. The magnetic field components shown 5 Table 1. Details of the station locations and the data sets Stations SLM BYB 5 BYB 6 BYB 7 BYB 8 BYB 9 ANN BYB 10 BYB 11 BYB 12 BYB 13 BYB 14 TIR BYB 15 BYB 16 BYB 17 BYB 18 Array 1991 1991 1991 1991 1991 1991 1992 1992 1992 1992 1992 1992 1995 1995 1995 1995 1995 Position North East Depth (m) Sampling (min) Period (days) 11◦ 550 14◦ 000 14◦ 000 14◦ 000 14◦ 000 14◦ 000 11◦ 220 12◦ 000 12◦ 000 12◦ 000 12◦ 000 12◦ 000 08◦ 400 09◦ 000 09◦ 000 09◦ 000 09◦ 000 78◦ 100 84◦ 500 85◦ 100 85◦ 300 86◦ 000 88◦ 000 79◦ 410 81◦ 000 83◦ 000 85◦ 000 85◦ 300 86◦ 000 77◦ 490 91◦ 300 90◦ 300 90◦ 000 88◦ 300 Land 3138 3125 3070 3072 2980 Land 3310 3430 3325 3317 3285 Land 3387 2756 2963 3435 1 1 1 1 1 1 1 1 1 1 1 1 1 2 2 2 2 20 12 12 12 12 12 PMO∗ 16 16 16 16 16 15 12 12 12 12 ∗ Permanent Magnetic Obsevatory. in the diagrams are Hx – (geographical north), Hy – (geographical east) and Hz - (vertical down ward). The Hz - variations at the seafloor stations in the close vicinity of the 85◦ E ridge (i.e. at BYB 5, BYB 6, BYB 7, BYB 13 and BYB 14) is very small. But at seafloor station BYB 10 (near the eastern continental margin of India) and the land stations SLM and ANN, Hz - variations are quite prominent. Further, the Hz and Hx - are in phase at all these stations. Corresponding to positive Hx - variations, the external current in the equatorial region is eastward and the related induced current in the sea water and subsurface region would be in the westward directions. At land-sea boundary (continental margin) this westward current gets deflected in the north-south direction (parallel to the coast). The external current during night hours being uniform and oriented in the east-west direction will produce only north-south (Hx ) field and no east-west (Hy ) field. Further, a uniform inducing field would also have no vertical (Hz ) field of external origin. The field of internal origin will then be more pronounced in the Hy and Hz variations. We do find significant Hy and Hz variations at BYB 10 and ANN. Analysis of the Indian magnetic observatory data (Nityanada et al., 1977; Rajaram et al., 1979) and South Indian magnetometer array data (Thakur et al., 1981 and 1986) proposed the presence of a regional effect arising from deflection in the direction of induced current flow in the Bay of Bengal. This north-south flowing induced current will produce anomalous Hy and Hz variations which are clearly seen at BYB 10 and ANN. Agarwal and Weaver (1989; 1990), by their numerical calculations, showed the deflection of current flow at the coast lines and concentration of currents at the southeast Indian coast. A similar type of current pattern was also noticed by Takeda and Maeda (1979). Though the coast effect may dominate at ANN which is close to the coast line, we do not expect such a large effect at land station SLM which was about 175 km away from the coast line. But the Hz variations observed at SLM seems to be anomalous. This anomalous Hz at SLM may be due to some other local or regional structure. Detailed study on the presence of such a structure is beyond the scope of this paper. Even though Hz - variations are small at BYB 11, BYB 13 and BYB 14, Hy - variations are anomalous at all these stations. Similarly at BYB 5, BYB 6, BYB 7 and BYB 9 also showed small Hz -variations, while Hy -variations are significant at these stations. For array 1995, as the land records were found noisy, we were left with only three seafloor station data. BYB 15, BYB 17 and BYB 18 showed almost similar behavior on all three components except that the BYB 6 Figure 2. Geomagnetic field variations recorded simultaneously for (a) Array-1991 stations corresponding to 13: 31–00:30 h (UT) of 19–20 March 1991; (b) Array-1992 stations corresponding to 12: 31–00.30 h (UT) of 2–3 March 1992 and (c) Array-1995 stations corresponding to 12: 31–00.30 h (UT) of 28–29 March 1995. 15 showed slightly larger Hz variations. This station is very close to the Andaman and Nicobar island chains (i.e., close to a lateral conductivity contrast). Another interesting feature is that at seafloor stations, the Hx and Hy variations are in phase. Knowing that Hy is totally of internal origin, it can remain in phase with Hx at seafloor, provided its major source is current induced in sea water. The Hx - variations at all seafloor stations are attenuated relative to that at corresponding land stations. This is natural to expect since in the Hx -field, both external and internal parts add up at land while at seafloor the current induced in the sea water becomes an external source for the point of observation; i.e. at seafloor, contributions of currents in the sea water would produce Hx -field in opposite sense of Hx produced by ionospheremagnetosphere part. This cause attenuation of the Hx -field at the seafloor, which is called as the ‘shielding effect’ of the electrically conducting sea water column (e.g., Schmucker, 1970). Apart from the above explained visual examination, we adopted two different approaches namely: geomagnetic depth sounding and vertical gradient sounding. 7 Geomagnetic depth sounding The anomalous Hz field at a site may be related to horizontal Hx and Hy fields by complex transfer functions A and B in the frequency domain as Hz = AHx + BHy . (1) This method, known as geomagnetic depth sounding (GDS) is routinely used to map the subsurface lateral electrical conductivity contrasts. The transfer functions A and B are generally represented as real and quadrature induction arrows of magnitude R and I respectively, with orientation φR and φI relative to geomagnetic coordinates. These quantities are defined by q −1 −Ar 2 2 , (2) R = (Ar + Br ), φR = tan −Br I = q (A2i + Bi2 ), −1 φI = tan Ai Bi . (3) Here the Parkinson convention (Parkinson, 1959) is adopted so that the arrows point towards the conductors. The Induction arrows were calculated for all magnetometer stations using robust remote-reference algorithm (Chave et al., 1987; Chave and Thomson, 1989) which is proved to be the best among the EM data processing techniques (Jones, 1989). For array 1991, array 1992 and array 1995, we used BYB 9, BYB 11 and BYB 18 as the remote-reference stations respectively. Induction arrows were computed for five selected periods, such as 10.67, 16.00, 32.00, 64.00 and 128.00 min. Figure 3 shows the induction arrows observed for two periods at all the stations. The observed induction arrows for seafloor stations are small in magnitude with a general southerly trend (i.e., point towards deeper waters). Quadrature arrows are much smaller than the real arrows. This southerly trend of the induction arrows as well as the larger real part of the arrows with respect to the quadrature part may be caused by the magnetic field polarisation in this equatorial region. Arrows at BYB 5, which is over the western flank of the 85◦ E ridge, showed a prominent southwesterly trend, especially at shorter periods (i.e., pointing away from the ridge). This may be indicating that the induced currents in the Bay of Bengal crust avoid flowing through the 85◦ E ridge and getting concentrated in the sedimentary column between the ridge and the eastern continental margin of India (i.e. the ridge is resistive and sediments are conductive). The Isopach map of the Bay of Bengal (Curray, 1994) clearly shows that the western and eastern sides of the N-S trending 85◦ E ridge have sedimentary thickness of 8–10 km and 6–8 km respectively. Right over the ridge the sediment thickness reduces to about 2–3 km. These sediment thicknesses mentioned are along the lines of magnetometer arrays of year 1991 and 1992. But corresponding to longer periods, as seen in Figure 3b, the direction of the induction arrows at BYB 5 become more southerly. This may be a clear indication that the lateral conductivity contrast exists only within the shallow region. The southerly trend of induction arrows at longer periods may be attributed partially to the persistance of coast effect at station BYB 5 and also to the source field polarisation. Induction arrows for BYB 17 and BYB 18 are very small. This is the case with all periodicities selected, which may indicate the absence of any lateral conductivity in the close vicinity. Moreover, sediment thickness is much less across NER along the array 1995 station locations (Curray, 1994). At seafloor stations close to the landsea boundary (BYB 10 and BYB 15), induction arrows showed comparatively larger magnitude. This may also be explained in terms of coast effect as well as the source field polarisation. But at the same time we must keep in mind the close vicinity of Sunda Subduction zone to BYB 15 and pondicherry rift to BYB 10 (Burke et al., 1978). We may require a denser array of magnetometers in this region to clear the ambiguities and deliniate these subsurface structures. Induction arrows observed at land stations are quite large. At SLM induction, arrows point in the SE direction at the shorter periods (T = 10.67–32.00 min) and in the SSE direction at longer periods (T = 64.00– 128.00 min). Since this station is away from the east coast of India, one does not expect the coast effect to prevail at shorter periods. At SLM induction, arrows are large at shorter periods. Larger magnitude induction arrows are also observed corresponding to longer periods. As mentioned in the previous section, this anomalous behavior may be due to some local or regional subsurface structures. Land station ANN also showed larger magnitude induction arrows pointing southward at all periods. Generally at a coastal station one would expect the induction arrows to be pointing towards sea and perpendicular to the coast. The unusual behavior of induction arrows at ANN was noticed by many earlier workers (e.g., Singh et al., 1977, Nityananda et al., 1977, Srivastava et al., 1984, Thakur et al., 1986) and suggested that it may be either an indication of induced current channeling through Palk Strait (between India and Srilanka) and currents in the 8 Figure 3. Induction arrows observed for (a) T = 16.00 min and (b) T = 64.00 min. The red and yellow arrows represent the real and the quadrature arrows respectively. (For land stations SLM and ANN, the scale of induction arrows is unit = 0.25.) Induction arrow magnitudes are plotted with two standard deviation error bars. 9 Indian ocean or a manifestation of the source field bias, because at the periods selected, the arrows tend to orientate themselves with the direction of source field polarisation. A very narrow continental shelf and the presence of Pondicherry rift (Burke et al., 1978) may have some influence on the anomalous field variations observed. Vertical gradient sounding Attenuation of the horizontal magnetic field through the ocean layer can be used to derive seafloor EM impedance estimate, a technique known as vertical gradient sounding (VGS) (Poehls and von Herzen, 1976; Law and Greenhouse, 1981). Defining a transfer function P as the ratio of horizontal magnetic field at the seafloor to that at the sea surface, the seafloor VGS impedance tensor ζ is given by ζ= (iωµ − P iωµ cos h(αh)) , (P α sin h(αh)) where α = ±(1 + i) r ωσµ , 2 (4) (5) ω is the angular frequency, µ is the magnetic permeability, σ is the electrical conductivity of the sea water and h is the depth of ocean. Then the apparent resistivity(ρa ) and phase (φ) are computed as 2 ζ , (6) ρa = ωµ Im(ζ) φ = arctan . (7) Re(ζ) We made an attempt to compute the VGS responses at the seafloor stations. Due to the difficulty of making vector magnetic measurements at the sea surface, we followed the suggestion of Weaver (1963) and used land-based data collected to represent the sea surface measurements. There are some limitations for the application of VGS method by considering horizontal components measured at land stations to represent the sea-surface values. This is because the land station horizontal components may be affected by the subsurface structures below the land stations and obtained VGS responses may be biased. However since the land stations are approximately in the same latitude and not very far from the region of seafloor stations, we followed the same approximation adopted in previous studies by various groups around the world (e.g., Law and Greenhouse, 1981; Ferguson et al., 1990; and White and Heinson, 1994). Then VGS impedances were calculated for the seafloor stations of both array 1991 and array 1992 using the robust analysis algorithm of Chave et al. (1987). The impedance ζ in Equation (4) were used to compute the apparent resistivities and phases by Equations (6) and (7) for periods ranging from 8 min to 128 min Then the depth-resistivity profiles were obtained for the seafloor stations using the 1-dimensional (1-D) inversion scheme (Utada, 1987) based on the Monte Carlo Technique, which searches for minimum variance. Figure 4 show the VGS responses, apparent resistivities, phases, and the 3-layer depth-resistivity model obtained by 1-D inversion corresponding to the seafloor stations of array 1991 and array 1992. VGS responses at all these seafloor stations showed approximately similar characteristics, whether the stations are close to the 85◦ E ridge or away from it. The 3layer depth-resistivity profiles obtained showed a top resistive layer (150–500 m) with a thickness of about 15–50 km. This layer is followed by highly resistive layer (2000–9000 m) with a thickness of about 235400 km. The third layer showed very low resistivity (0.1–50.0 m). Thus the 1-D inversion models show that the oceanic crust and upper mantle are resistive followed by a highly conducting region at a depth of about 250–450 km. Since the VGS responses corresponding to the periods used in the present study (i.e., 8.00–128.00 min) do not have the resolving power in terms of depth-resistivity for shallow structures, the responses corresponding to the sedimentary column and the 85◦ E ridge could not be seen. As described earlier, the Hy -variations at SLM is very small and that at ANN is anomalous. So we restricted the calculation of VGS responses to the attenuation of the Hx -field only. For array 1995, we could not compute VGS impedances since the simultaneous land-based data at TIR were found noisy. Model calculations Seafloor EM observations are influenced by the conducting sea water column as well as the subsurface geological structures. To evaluate such effects, it may be advisable to do model calculations. In the present study, visual examination of the time series and induction arrows calculated indicated that the EM induction process in the Bay of Bengal is complex. We made an attempt to solve this problem numerically and adopted two approaches, namely: thin-sheet Figure 4. The apparent resistivities (ρa ), phases (φ) and the 3-layer depth-resistivity profile obtained from the 1-D inversion for the seafloor stations (a) BYB 5, (b) BYB 6, (c) BYB 7, (d) BYB 9, (f) BYB 10, (g) BYB 11, (h) BYB 13 and (i) BYB 14. The dots with error bars and thick lines are the observed VGS responses and 1-D inversion responses respectively. (e) and (j) are the 3-layer depth-resistivity profiles obtained from the 1-D inversion for these seafloor stations. 10 11 approximation (McKirdy et al., 1985) and three dimensional forward modelling (Mackie et al., 1994). Any geophysical data interpretation or model calculations without considering the available geological and geophysical constraints may lead to incorrect results. Here in these model calculations we incorporated as many a priori constraints as possible. Thin-sheet modelling Thin-sheet electromagnetic approximation has been proven to be good in resolving 3-D induction problems where the conductivity anomalies are associated with shallow sub-surface features (i.e., conductivity variations occur in a thin-sheet above a layered earth). Thus this method is well suited to study the effect of sea water column on the seafloor EM measurements. We followed the method of McKirdy et al. (1985) in which calculation of the total field is required to have a Neumann boundary condition of vanishing outward gradient at infinity. The study area and the surrounding region were divided into 50 × 50 grids with a grid-node spacing of 55 km. The edge effect has been minimized by extending the grids a sufficiently larger distance away from the observational domain. The sea-water column conductance values have been averaged at every 100 m up to a water depth of 4500 m (assuming the average sea water conductivity σ as 3.3 S/m) to provide 45 different conductance values. The surrounding land region (thickness = 4.5 km) was given a conductance value of 22.5 S. The thin-sheet conductance map is shown in Figure 5. Since the present seafloor EM experiment is the first of its type for this region, information about the subsurface resistivity structure of the Bay of Bengal was not available. So, the average 1-D depth – resistivity profile obtained from the present study (i.e. from VGS method) was incorporated as the initial layered structure beneath the thin-sheet. Here in this model calculations, all thin-sheet conditions (Weaver, 1982) were fully satisfied. Thin-sheet calculations were made with two orthogonal polarisations of the inducing field. These polarisations are denoted as TM-polarisation for the field in the X-direction and TE-polarisation for field in the Y-direction. X- and Y- directions refer to the geomagnetic north and geomagnetic east directions respectively, although the thin-sheet grid may not necessarly be aligned with geomagnetic co-ordinates. The computed EM components for TM- and TE- polarisations of the induc- ing field contains all parameters required to calculate thin-sheet 3-D responses. The GDS induction arrows may be computed using the corresponding horizontal magnetic fields for on and below the thin-sheet. Verical component is assumed to be continuous across the sheet. Since our objective was to obtain seafloor model responses, we used the magnetic fields for the lower side of the thinsheet. The total field (i.e., both polarisation) is used for computing the thin-sheet model seafloor induction arrows. In the final model, the layers beneath the thin-sheet were such that, the first and second layers have resistivities of 1000 m and 5000 m with thicknesses of 50 km and 350 km, respectively. These layers were followed by a third layer which has a resistivity of 0.1 m and thickness extending to infinity. The thin-sheet model induction arrows were then calculated. Figure 6 shows the thin-sheet induction arrows and the observed induction arrows for two periods (T = 16.00 and 64.00 min). Model induction arrows clearly show that at all periodicities coast effect persist even at the seafloor stations in the close vicinity of the 85◦ E ridge which is about 500 km away from the coast line. This is on the contrary to the land and sea surface where the coast effect diminishes within a few tens of kilometers corresponding to the periodicities chosen in the present study. As noted from the observed induction arrows, the quadrature arrows are very small compared to the real arrows (see Figure 3). In general, the real part is much larger than the quadrature part and hence the real part is used more often (Rikitake and Honkura, 1985). So we restricted our model comparisons to real induction arrows only. Thin-sheet induction arrows corresponding to the positions of seafloor magnetometer stations in the close vicinity of the 85◦ E ridge and the NER agree well with the observed induction arrows (i.e., point towards deeper waters) with an exception at BYB 5, where the direction of observed arrows point southwesterly at shorter periods. For the stations close to the land-sea contrast, the oberved and model induction arrows could not be matched well due to the limitations of the modelling technique and also due to not incorporating the subsurface conductivity structure at land-sea boundaries in the thin-sheet model. One must also remember that the seafloor measurements were carried out on a thick sedimenatry column. A more exact model calculation would need inclusion of this sedimentary column. The sediments are considered to be conductive mainly due to its porocity. 12 Figure 5. Thin-sheet conductance map of the Bay of Bengal and the surrounding region. (Colour coding of the conductance values are also given.) Figure 6. Thin-sheet induction arrows and the observed induction arrows for (a) T = 16.00 min, and (b) T = 64.00 min. Red and green arrows represent observed and thin-sheet arrows. For clarity thin-sheet arrows are plotted only for the profiles corresponding to array 1991, array 1992, and array 1995. 13 14 Within a thick sedimentary column, as the depth increases, the porocity decreases. Water-filled porocity φ of sediments can be related to a depth of burial z by a simple exponential function φz = φ0 .e−az (8) where φ0 is the porocity of sediments at seafloor and a is a constant (a −1 ranges from 1.5–2.0) (Le Pichon et al., 1990; Heinson and Segawa, 1997). Archie (1942) showed the relationship between porocity and conductivity. Brace et al. (1965) have shown that an empirically derived Archie’s law formulation is applicable to a wide range of rock types and porocities. Hermance (1979) modified and rewrote this relation as σ∗ = σs + (σf − σs )φt , (9) where z is depth, exponent term t varies in between 1 and 2 (laboratory studies), σs and σf are the conductivities of solid phase and fluid phases and σ∗ is the conductivity of the rock sample to be determined. Using this method we have computed the sediment conductivity at various depths. The isopach map of the Bay of Bengal (Curray, 1994) shows that the sediment thickness varies from 22 km at about 20◦ N to 2 km at the equator. In the region of seafloor EM measurements, both sides of the 85◦ E ridge has about 8–10 km sediments whereas the ridge crest has about 2–3 km thick sediments. These sediments are too thick to be incorporated into the thin-sheet and too thin to be added as a separate layer just beneath the thin-sheet (i.e., thin-sheet conditions could not be satisfied). To alleviate this problem we made an attempt to do 3-D forward modelling. 3-D forward modelling We adopted the 3-dimensional finite difference algorithm of Mackie et al. (1994) which is based on the integral forms of the Maxwell’s equations. Here in the model calculation we assign the tangential Hfields on the boundaries of the model for appropriate polarisation. These boundary values come from a 2dimensional (2-D) TM-mode calculation where each vertical plane of the 3-D model is treated as the inner part of a large scale 2-D model. The values obtained at the positions corresponding to the boundaries of the 3-D model are then used as boundary values for the 3-D problem. The TM-mode values are used since these are appropriate for a current that crosses resistive boundaries. The study area and the surrounding region were divided into 50×50×16 blocks (not counting the air layers required in the forward modelling) totalling 40,000 model parameters. Here the horizontal spacing of blocks at the region of interest was taken as 55 km, similar to the thin-sheet grid-node spacing. The source field for magnetotelluric problem is a uniform current sheet that is put at the earth’s surface. At the top of the air layers, a 1-D plane wave impedance for the outgoing fields is used. Likewise, a 1-D plane wave impedance for a layered media is used at the bottom of the earth model. Depth-resistivity values were adopted as mentioned in the case of thin-sheet calculations. The advantage of this method is that it could incorporate the thick sedimentary column as well as the known subsurface geological constraints from various geological and geophysical studies (e.g., Curray, 1994; Gopalarao et al., 1994; Ramana et al., 1997; Sandwell and Smith, 1997). Our initial model incorporated only the sea water column and the sedimenatry layers of varying thickness and resistivities followed by 1-D structure obtained from VGS method. Though the seafloor model MT responses were comparable with 1-D inversion responses, the model failed to reproduce the GDS responses. Later we incorporated other subsurface geological features such as 85◦ E ridge and NER (both with 500 m resistivity) as seen on the tectonic map of Bay of Bengal which is given as Figure 7. Then the 3-D model responses were computed. The 3-D model induction arrows show a general trend towards deeper waters as seen in the case of thinsheet arrows. At a short period (T = 16.00 min) for the point corresponding to the seafloor station BYB 5, 3-D model induction arrows show the change in direction (points southwesterly), which agrees well with the observed induction arrow. As the period increases, the direction of induction arrows change is as shown in Figure 8. This behavior fairly agrees with that of the observed induction arrows at all periods for this station, indicating the possible presence of a lateral conductivity contrast at shallow depths, (i.e. the lateral conductivity contrast between the 85◦ E ridge and the surrounding sedimentary column). The induced current avoids flowing through the resistive 85◦ E ridge and gets concentrated towards less resistive sediments in the western side of the 85◦ E ridge. Observed 1-D responses (VGS) were compared with 3-D model responses and found that they are in good agreement especially for deeper layers (see Figures 9) for which the resolution is better corresponding to the range of periods used in the present study (T = 8.00– 128.00 min). Our final 3-D model for the study region 15 Figure 7. Tectonic map of the Bay of Bengal.Sediment isopachs (km) are given by dotted line (after Curray, 1994). 16 Figure 8. Comparison of induction arrows observed, computed from thin-sheet and 3-D model calculations for selected periods at seafloor station BYB 5. Red, green and yellow arrows represent observed, thin-sheet and 3-D arrows, respectively. is shown in Figure 10. This model has a resistive oceanic crust (layers of 1000 m) and an upper mantle (layers of 3000 m, 1000 m, 500 m and 200 m), followed by a very low resistive region (0.1 m) at a depth of 400 km. As explained, in the final model, complex 3-D structures were restricted to the shallow region and the periodicities used in the present study are between 8.00–128.00 min. The prominent lateral conductivity contrast between the conducting sediments and the resistive 85◦ E ridge is seen on the behavior of 3-D model induction arrows (Figure 8). At the same time the 3-D model resitivity and phase responses show that the shallow 3-D structures like the 85◦ E ridge and 17 NER have less influence on the depth-resistivity profile obtained. This can be seen from Figure 9, where the observed responses and the model responses agree fairly well for seafloor stations BYB 5 and BYB 6 of array 1991 and BYB 13 and BYB 14 of array 1992 (stations over the 85◦ E ) as well as BYB 9 of array 1991 and BYB 10 and BYB 11 of array 1992 (stations away from the 85◦ E). Model comparisons were carried out between 3-D model seafloor MT responses and conversions of the observed VGS responses. So the final 3-D model still has some limitations in the sense that the horizontal magnetic field at the land reference stations may be different from the sea-surface magnetic field above the seafloor stations. Despite these limitations, the final 3-D model proposed here has the following features: (1) This model can handle the very thick sedimentary layers of the Bay of Bengal; (2) This model gives better fits to observed GDS and synthetic MT responses as shown in Figure 9 than any 1-D or thin-sheet models. The authors think this 3-D model may be useful as first hand model for the future EM induction studies in this region. Conclusions Seafloor magnetometer station of arrays 1991, 1992 and 1995 together covered an east-west profile from the eastern continental margin of India to the northern extension of the Sunda Arc (i.e., an east-west profile of the entire Bay of Bengal). Visual examination of the time series and the selected data clearly indicated the complexity of the EM induction process in the Bay of Bengal. Though the observed induction arrows were small in magnitude, they revealed the direction of induced currents in the Bay of Bengal and subsurface. Induction arrows have a general trend towards the south (i.e., to the region of deeper waters). Arrows corresponding to the seafloor station BYB 5, which was situated at the western flank of the 85◦ E Ridge, showed a southwesterly trend at shorter periods and as the period increases the trend has changed more towards the south. This oscillation characteristic of the induction arrows at BYB 5 may be attributed to the presence of a shallow lateral conductivity contrast in the close vicinity of this seafloor station. Thin-sheet and 3-D forward model calculations jointly showed that the observed induction arrows at seafloor sites could be explained in terms of nearsurface features such as the thick sedimentary deposits (i.e., deep-sea fans of the Bay of Bengal), the resis- tive 85◦ E Ridge and the thick seawater column above the seafloor sites. The induced currents in the Bay of Bengal crust avoid flowing through the resistive 85◦ E Ridge and getting concentrated towards less resistive sediments in the western side of this ridge. As per the seismic reflection data (Gopalarao et al., 1994), the eastern flank of the 85◦ E Ridge is gently sloping while the western flank is steep. So the lateral contrast at the western flank is sharper and is clearly reflected on the induction arrows at seafloor station BYB 5, which was situated right over the western flank of the 85◦ E Ridge (i.e., at the lateral conductivity boundary). Thus the present study favours the propostition of Liu et al. (1982), that the gravity low over the 85◦ E ridge is due to the thickening of oceanic crustal material forming the ridge with its underlying root in the lithosphere. Induction arrows observed at seafloor stations close to the land-sea boundary (BYB 10 and BYB 15) could not be fully reproduced by the model calculations. This may be due to not incorporating the complex structures at the land-sea boundary, e.g., proposed conductor beneath Palk Strait (Rajaram et al., 1979) and Pondicherry rift (Thakur et al., 1986) in the case of BYB 10 and Sunda subduction zone in the case of BYB 15. A dense network of seafloor EM stations may throw light on these complex structures (e.g., Wannamaker et al., 1989; Toh, 1993; White and Heinson 1994). Of course we must keep in mind that any model calculation has its own limitations. Coverage of larger area and limited computer memory allocation restricted us from incorporating every local subsurface feature into the 3-D model. To investigate the depth-resistivity profile, we adopted the VGS method. Though there were some limitations with data sets, a reasonable 1-D resistivity structure was obtained for the subsurface of the Bay of Bengal. The observed depth-resistivity profiles showed a resistive oceanic crust and upper mantle followed by a low resistive region at a depth of about 250–450 km. Since the depth-resistivity information of the land region included in the model calculation was not clearly known, model comparisons were carried out between 1-D VGS responses and 3-D model seafloor MT responses. As mentioned earlier, there are some limitations for the application of the VGS method by using the horizontal components measured at the land station to represent the sea surface values. This is because the land horizontal components may be affected by the subsurface structures below the land station and the obtained VGS responses may be biased. To alleviate this one should observe variations in Figure 9. Comparison of the 3-D model responses with the observed VGS and 1-D responses corresponding to the seafloor stations (a) BYB 5, (b) BYB 6, (c) BYB 7 (d) BYB9 (f) BYB 10, (g) BYB 11, (h) BYB 13 and (i) BYB 14 respectively. Dots with error bars, thick line and dotted line represent observed VGS responses, 1-D inversion responses and best fitting 3-D forward model responses respectively. (e), and (j) are the depth-resistivity profiles obtained from 3-D model calculations (dotted lines) compared with the 1-D inversion (solid lines) corresponding to the seafloor stations. The thin and thick dotted lines represent model values corresponding to stations right over the 85◦ E ridge and away from the ridge respectively. 18 19 Figure 10. Best fitting 3-D model for the Bay of Bengal. Subsurface has been divided in to 16 layers. Layer numbers and thicknesses are clearly marked. The resistivities (m) are shaded according to the scale at the bottom. 20 the horizontal electric and magnetic field components at seafloor, namely, the direct MT method. However, in the present study we had only seafloor magnetic field measurements and VGS was the only alternative approach to detect the subsurface electrical conductivity structure. Computed 3-D model responses fairly agree with the observed VGS responses. Very few techniques like seismic tomography, electromagnetic induction and gravity measurements can provide clues to the structure and physical properties of earth’s mantle. Seismic tomography has been proven to be the best among them. So there is a general tendency to correlate any geological or geophysical finding corresponding to deeper structures with that of the results from seismic studies. Tarits (1994), in his review on EM studies of global geodynamic process, showed that the electrically resistive subsurface layers may be correlated to fast seismic velocity zones, and conducting layers to slow velocity zones. Here in the present study, we compared the depth-resistivity profile obtained for the Bay of Bengal with P-wave seismic tomography model (Inoue et al., 1990) and Swave tomography model (Li and Romanowicz, 1996). The depth to the highly conducting region observed (250–450 km) agrees well with the seismic low velocity zone of the northeastern Indian ocean derived from the seismic tomography. Thus we propose an electrical conductivity structure for oceanic crust and upper mantle of the Bay of Bengal. Need remains for a detailed survey with dense network of seafloor EM instruments for a better understanding of the subsurface electrical conductivity structures. Acknowledgements We thank L.A. D’Cruz, A. Dhar, M.R. Kulkarni, A. Hanchanal and P. Gawali for their assistance during the data collection. Thanks are also due to G. Heinson, and R.L. Mackie, who kindly provided the thin-sheet modelling and three-dimensional forward modelling codes and clarified doubts in the course of model calculations. J.R. Curray and Dick Batchman are thanked for providing the isopach maps of the Indian Ocean and the Bay of Bengal. One of the authors (E.J.J.) thanks the Ministry of Education, Science, Sports and Culture of Japan for the research fellowship. Three anonymous referees are thanked for their critical comments which improved the manuscript. Figures are generated using Generic Mapping Tool (GMT). References Agarwal, A.K. and Weaver, J.T., 1989, Regional electromagnetic induction around the Indian peninsula and Sri-Lanka; a-three dimensional numerical model study using the thin-sheet approximation, Phys. Earth Planet. Int. 54: 320–331. Agarwal, A.K. and Weaver, J.T., 1990, The nature of horizontal anomalies and magnetotelluric impedance over southern India, Proc. Indian Acad. Sci. (Earth Planet Sci.) 99(4): 681–692. Archie, G.E., 1942, The electrical resistivity log as an aid to determining some reservior characteristics, J.Petrol.Technol. 5: 1–8. Brace, W.F., Oramnge, A.S. and Madden, T.R., 1965, The effect of pressure on the electrical resistivity of water-saturated crystalline rocks, J.Geophys. Res. 70: 5669–5678. Burke, K.C.A., Delano, L., Dewey, J.F., Edelstein, A., Kidd, W.S.F., Nelson, K.D., Sengor, A.M.C. and Strup, J., 1978, Rifts and structures of the world. Contract Rep. Nas 5–24094, Geophys. Branch, ESA Div., Goddard Space Flight Center, Greenbelt, Md., 238 pp. Chaubey, A.K., Ramana, M.V., Sarma, K.V.L.N.S., Krishna, K.S., Murty, G.P.S., Subrahmanyam, V., Mittal, G.S. and Drolia, R.K., 1991, Marine Geophysical Studies over the 85◦ E Ridge, Bay of Bengal, in First International Seminar and Exhibition on exploration Geophysics in 1990s, held at Hyderabad,India, 25–30 November, Extended Abstract 2: 508–515. Chave, A.D., Evans, R., Filloux, J.H., White, A., Heinson, G.S., Tarits, P., Toh, H., Utada, H., Ichikita, T. and Baba, K., 1996, The Mantle ELectromagnetic and Tomography (MELT) Experiments, 13th Workshop on Electromagnetic Induction in the Earth, Abstracts, Hokkaido, Japan, July, 12–18. Chave, A.D. and Thomson, D., 1989, Some comments on Magnetotelluric Response Function Estimation, J. Geophys. Res. 94: 14215–14225. Chave, A.D., Thomson, D. and Ander, M.E., 1987, On the Robust Estimation of Power Spectra, Coherence and Transfer Functions, J. Geophys. Res. 92: 633–648. Curray, J.R., 1994, Sediment volume and mass beneath the Bay of Bengal, Earth Planet. Sci. Lett. 125: 371–383. Curray, J.R., Munasinghe, T., 1991, Origin of the Rajmahal Trap and the 85◦ E Ridge: Preliminary reconstructions of the trace of the Crozet Hot Spot, Geology 19: 1237–1240. EMSLAB Group, 1988, The EMSLAB electromagnetic sounding experiments, EOS 6989: 98–99. Ferguson, I.J., Lilley, F.E.M. and Filloux, J.H., 1990, Geomagnetic Induction in the Tasman Sea and the electrical conductivity structure of the Tasman seafloor, Geophys. J. Int. 102: 299–312. Gopalarao, D., Bhattacharya, G.C., Ramana, M.V., Subrahmanyam, V., Ramprasad, T., Krishna, K.S., Chaubey, A.K., Murty, G.P.S., Srinivas, K. and Desa, M., 1994, Analysis of Multi-channel Seismic Reflection and Magnetic data along 13◦ N latitude across the Bay of Bengal, Marine Geophys. Res. 16: 225–236. Heinson, G.S., White, A., Law, L.K., Hamano, Y., Utada, H., Segawa, J. and Toh, H., 1993, The Electromagnetic Investigation of Juan de Fuca Ridge, Marine Geophys. Res. 15: 77–100. Heinson, G.S. and Segawa, J., 1997, Electrokinematic signature of the Nankai Trough accretionary complex: preliminary modelling for the Kaiko-Tokai program, Phys. Earth Planet. Inter. 99: 33– 53. Hermance, J.F., 1979, The electrical conductivity of materials containing partial melts: a simple model from Archie’s law, Geophys. Res. Lett. 6: 613–616. 21 Inoue, H., Fukao, Y., Tanabe, K. and Ogata, Y., 1990, Whole mantle P-wave travel time tomography, Phys. Earth Planet. Inter. 59: 294–328. Iyengar, R.V., Joseph, E.J., Geetharamanan, G., D’Cruz, L.A. and Singh, B.P., 1992a, Magnetometer array study with ocean bottom magnetometers in the Andaman Sea, Geol. Surv. India, Spl. Pub. 29: 35–40. Iyengar, R.V., Joseph, E.J., Geetharamanan, G., D’Cruz, L.A. and Singh, B.P., 1992b, Ocean bottom magnetometer study in the Bay of Bengal along 13◦ N latitude, Geol. Surv. India, Spl. Pub., 29: 79–85. Jones, A.G., 1980, Geomagnetic Induction Studies in the Scandinavia, J. Geophys. 48: 181–194. Joseph, E.John, Iyengar, R.V., D’Curz, L.A. and Singh, B.P., 1995, Seafloor Geomagnetic Sounding near the 85◦ E Ridge in the Bay of Bengal, J. Geomag. Geolectr. 47: 421–430. Law, L.K. and Greenhouse, J.P., 1981, Geomagnetic variation sounding of the asthenosphere beneath the Juan de Fuca Ridge, J. Geophys. Res. 86: 967–978. Le Pichon, X., Henry, P. and Lallemant, S., 1990, Water flow in the Barbados accretionary complex, J. Geophys. Res. 95: 8945– 8967. Li, X.-D. and Romanowicz, B., 1996, Global mantle shear velocity model developed using nonlinear asymptotic coupling theory, J. Geophys. Res., 101: 22245–22272. Lilley, F.E.M., Filloux, J.H., Ferguson, I.J., Bindoff, N.L. and Mulhearn, P.J., 1989, The Tasman project of seafloor magnetotelluric exploration: experiment and observations, Phys. Earth Planet. Int. 53: 405–421. Lilley, F.E.M. and Sloane, M.N., 1976, On estimation of electrical conductivity using gradient data from magnetometer arrays, J. Geomag. Geoelectr., 28: 321–328. Liu, C.-S., Sandwell, D.T. and Curray, J.R., 1982, The negative gravity field over the 85◦ E ridge, J. Geophys. Res. 87: 7673– 7686. Mackie, R.L., Smith, J.T. and Madden, T.R, 1994, Threedimensional electromagnetic modelling using finite difference equations: The magnetotelluric example, Radio Sciences 29(4): 923–935. McKirdy, D.McA, Weaver, J.T. and Dawson, T.W., 1985, Induction in a thin-sheet of variable conductance at the surface of the stratified earth. II, Three-dimensional theory, Geophys. J. R. Astron. Soc. 80: 177–194. Morgan, W.J., 1978, Rodriguez, Darwin, Amsterdam . . . a second type of hot spot Islands, J. Geophys. Res. 83; 5355–5360. Muller, R.D., Royer, J.D. and Lawver, L.A., 1993, Revised plate motions relative to the hot spot track, Geology 21: 275–278. Nityananda, N., Agarwal, A.K. and Singh, B.P., 1977, Induction at short period on the horizontal field variation in the peninsular India, Phys. Earth Planet. Int. 15, 5–9. Parkinson, W.D., 1959, Direction of rapid geomagnetic fluctuations, Geophys. J. 2: 1–14. Poehls, K.A. and von Herzen, R.P., 1976, Elecrical resistivity structure beneath the north-west Atlantic Ocean, Geophys. J. R. Astron. Soc. 47: 331–346. Rajaram, M., Singh, B.P., Nityanada, N. and Agarwal, A.K., 1979, Effect of the presence of a conducting channel between India nad Sri-lanka on the features of the Equatorial Electrojet, Geophys. J. R. Astron. Soc. 56: 127–138. Ramana, M.V., Subrahmanyam, V., Chaubey, A.K., Ramaprasad, T., Sarma, K.V.L. N.S., Krishna, K.S., Desa, M. and Murty, G.P.S., 1997, Structure and origin of the 85◦ E Ridge, J. Geophys. Res. 102: 17995–18012. Rikitake, T and Y.Honkura, Y., 1985, Solid Earth Geomagnetism Terra Sci. Publ. Co., Tokyo. Sandwell, D.T. and Smith, W.H.F., 1997, Marine gravity anomaly from Geosat and ERS-1 satellite altimetry, J. Geophys. Res. 102: 10039–10054. Schmucker, U., 1970, Anomalies of Geomagnetic variations in the southwest United States, Bull. Scripps Inst. Oceanog. 13: 165. Segawa, J., Hamano, Y, Utada, H. and Toh, H., 1986, A Sea floor magnetometer model OBM-S4, J. Geodetic Soc. Japan. 32: 248– 273. Segawa, J. and Toh, H., 1992, Detecting fluid circulation by electric field variations at the Nankai Trough, Earth Planet Res. Lett. 109: 469–476. Seymour Sewell, R.B., 1925, Part I: The geography of Andaman sea basin, in Indian waters, Asiatic Soc. Bengal Mem. 9: 1–26. Shneyer, V.S., Trofimov, I.L., Abramov, Y.M., Zhdanov, M.S., Machinin, A.V. and Shabelyansky, V., 1991, Some results of gradient electromagnetic dounding in Doldrams middle atlantic ridge fracuture, Phys. Earth Planet. Int. 66: 259–264. Singh, B.P., Nityananda, N. and Agarwal, A.K., 1977, Induced magnetic variation in the Indian Peninsula, Acta Geodact. Geophys. Montanist Acad. Sci. Hung. Tomus 12: 65–72. Srivastava, B.J., Singh, B.P. and Lilley, F.E.M., 1984, magnetometer array studies in india and the lithosphere, Tectonophysics 105: 355–371. Storey, B.C., 1995, The role of mantle plumes in the continental breakeup: case histories from Gondwanaland, Nature 377: 301– 308. Takeda, M. and Maeda, H., 1979, Effect of the coast line configaration of south Indian and Sri-Lankan regions on the induced field at short period J. Geophys. 45: 209–218. Tarits, P., 1994, Electromagnetic studies of global geodynamic processes, Surveys in Geophysics 15: 209–238. Thakur, N.K., Mahashabde, M.V., Arora, B.R., Singh, B.P., Srivastava, B.J. and Prasad, S.N., 1981, Anomalies in the geomagnetic variations on peninsular India near Palk Strait, Geophys. Res. Lett. 8: 947–950. Thakur, N.K., Mahashabde, M.V., Arora, B.R., Singh, B.P., Srivastava, B.J. and Prasad, S.N., 1986, Geomagnetic variation anomalies in peninsular India, Geophys. J. R. astron. Soc. 86: 839–854. Toh, H., 1993, Electrical conductivity structure of the Izu-Bonin arc revealed by seafloor electromagnetic observations, Ph.D Thesis, the University of Tokyo. Toh, H. and Segawa, J., 1995, Anomalies of geomagnetic and geolectric variations at the seafloor around the Izu-Ogasawara Arc, Bull. Ocean Res. Inst. the University of Tokyo 32. Utada, H., 1987, A direct inversion method for two-dimensional modelling in the geomagnetic induction problem, Ph.D. Thesis, the University of Tokyo. Wannamaker, P.E., Booker, J.R., Jones, A.G., Chave, A.D., Filloux, J.H., Waff, H.S. and Law, L.K., 1989, Resistivity cross section through the Juan de Fuca Ridge subduction system and its tectonic implications, J. Geophys. Res., Special on EMSLAB 94: 14127–14144, 14277–14283. Weaver, J.T., 1963, The electromagnetic field within a discontinuous conductor with reference to geomagnetic micropulsations near coastline, Can. J. Phys. 41: 484–495. Weaver, J.T., 1982, Regional induction in Scotland; an example of three-dimensional numerical modelling using the thin sheet approximation, Phys. Earth Planet. Int. 28: 161–180. White, A. and Heinson, G., 1994, Two-dimensional electrical conductivity structure across the southern coastline of Australia, J. Geomag. Geolectr. 46: 1067–1081.