as a PDF
advertisement

Proceedings of the 2005 IEEE
Engineering in Medicine and Biology 27th Annual Conference
Shanghai, China, September 1-4, 2005
Detection of Spatio-Temporal Gait Parameters
by Using Wearable Motion Sensors
Seon-Woo Lee1, Kenji Mase2,3 and Kiyoshi Kogure3
1
Division of Information Engineering and Telecommunications, Hallym University, Chuncheon, KOREA
2
Information Technology Center, Nagoya University, Nagoya, JAPAN,
3
ATR Intelligent Robotics and Communication Laboratories, Kyoto, JAPAN
Abstract— This paper presents a method to detect the
spatio-temporal parameters of gait by using wearable motion
sensors with a gyro, accelerometer, and magnetic sensor. The
detected gait parameters are as follows: stance (ST), double
support (DS), and gait cycle (GC) time as temporal parameters,
and the stride length (SL) as spatial parameter. Four motion
sensors are attached on both thighs and shanks of users, and the
sensor data are collected in a portable PC. The temporal
parameters are estimated by finding walking events, and then
the stride length is calculated with two gait models. The
estimated parameters are compared to those obtained from a
motion capture system (VICON system).
I. INTRODUCTION
Gait analysis is often helpful in the medical management of
those diseases which affect the locomotor system [1]. The
most commonly employed method involves the use of
sophisticated systems, such as force plates and 3-dimensional
camera systems. Measurements in a special gait laboratory
and of limited duration, thus, limiting the clinical value of the
data obtained. Ambulatory monitoring of walking is more
objective and enables measurements to be recorded in a
natural setting during routine daily activities. Recently
several systems, therefore, have been developed. In [2], a
measurement method of stride length and walking velocity by
using a gyroscope has been developed. Although the stride
length is the most basic functional information about the gait,
the detection of gait phase is also important to trigger a
functional electrical stimulation system for patients with
walking disabilities. Several automatic triggering methods
have been proposed based on different sensor systems
ranging from simple foot switches to inclinometers,
goniometers, gyroscopes, accelerometers [3-5]. By using a
set of gyroscopes only, a gait analysis method to estimate
spatio-temporal parameters of gait has been proposed [6],
which can be used to assess the gait in patients with
Parkinson’s disease. Several methods to recognize human
motions including walking, have been developed [7-9].
In this paper, we propose an ambulatory system to detect
the spatio-temporal gait parameters with body fixed sensing
devices called ‘motion sensors’. We suggest a method to
Corresponding author is Prof. Lee. (senu@hallym.ac.kr)
0-7803-8740-6/05/$20.00 ©2005 IEEE.
determine walking events such as heel strike and toe off based
on the rotation angle data of motion sensors, then to calculate
temporal parameters. The stride length as a spatial parameter
can be estimated from the detected walking events and two
double pendulum models. We introduce new gait model to
calculate the stride length of first step from standing pose.
Experiments are accomplished to verify the effectiveness of
the proposed method.
II.
METHODS
A. System configuration
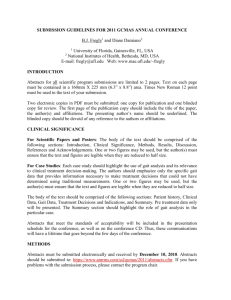
Fig. 1 shows the configuration of the proposed
measurement system, which consists of a portable PC (SONY
co., PCG-U101), a USB hub, and four motion sensors (NEC
Tokin co., MDP-A3U9 [10]). The motion sensor with
3-dimensional accelerometer, 3D angular rate sensors (i.e.,
gyroscope), and 3D terrestrial magnetism sensor, detects the
3D posture angles (Euler’s angles) of the device on which it is
installed. The dynamic range of the angle is ±180º for yaw
and roll, and ±90º for pitch. The resolution of the sensor is 1º.
The sensed data are provided to the portable PC via USB
interface.
The data collecting program was implemented with
C-language with the given API of the motion sensor. The data
of the motion sensors are sampled at every 20 msec (i.e., 50
Hz).
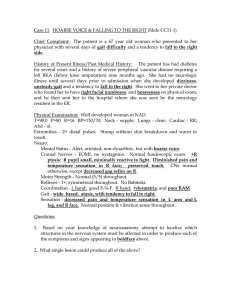
During the walking trials, subjects carried the system. The
motion sensors were attached to selected body segments, as
shown in Fig. 2. Four sensors were attached on the lower
limbs: one on each thigh and shank as same as used in [4].
Rubber bands were used to fix the sensors which were
aligned to the medio-lateral axis, hence measuring rotations
in sagittal plane. Six retro reflective markers were attached on
the four motion sensors and the upper area of shoes, as shown
MR/L{1,2,3} in Fig. 2.
Fig. 2 shows also the direction of each Euler angle as: yaw
(Į) is circular angle with respect to anterior direction (i.e.,
shown as Z-axis), pitch (ȕ) is to inferior direction (Y-axis),
and role (Ȗ) is to right direction (X-axis). Since the rotation
angle of thigh and shank in sagittal plane is role (Ȗ), we use
only the roll angle to estimate the gait parameters.
Portable PC
3D Motion Sensor
• Sony co.,
• NEC Tokin co., MDS-A3U9
• Has 3D accelerometer,
PCG-U101
• Celeron 600MHz
gyroscope, magnetic sensors
• Euler angles: yaw, roll, pitch
• Resolution: 1 degree
4port USB
HUB
Fig. 1. Hardware of the sensing system
Marker for motion
capture system (MR3)
X-axis
role(Ƚ )
ML3
Z-axis
yaw(Ȼ )
ML2
ML1
MR2
MR1
The swing phase lasts from toe off to the next initial
contact. The duration of a complete gait cycle is known as
the gait cycle time (GCT), which is divided into stance time
and swing time. Right initial contact occurs while the left
foot is still on the ground, and there is a period of double
support (DS) between initial contact on the right and toe off
on the left. The double support can be divided into initial
double support (IDS) between Rhs and Lto, and terminal
double support (TDS) between Lhs and Rto.
If we measure time slice when these events occur, temporal
gait parameters could be calculated as follows (written for the
right leg):
Gait Cycle Time (GCT):
GCT(k) = Rhs(k+1) - Rhs(k).
(1)
Stance Time (ST):
(2)
ST(k) = [Rhs(k) - Rhs(k) ] /GCT(k)*100 (%)
Initial Double Support (IDS):
(3)
IDS(k) = [Lto(k) - Rhs(k) ] /GCT(k)*100 (%)
Terminal Double Support (TDS):
TDS(k) = [Rto(k) - Lhs(k) ] /GCT(k)*100 (%)
(4)
Here, the Rhs(k) represents the sampling time index at when
the event of right foot strike occurs within k-th gait cycle. As
similar Rto(k), Lhs(k), Lto(k) means the right toe off, left heel
strike, and left toe off, respectively.
䎖䎧䎃䏐䏒䏗䏌䏒䏑䎃䏖䏈䏑䏖䏒䏕䎃䏇䏄䏗䏄
䎐䎓䎑䎘
Y-axis
pitch(ȼ )
1st Lhs
2nd Lhs
GCT
1st half
SwingR
swing phase
䎵䏒䏏䏈䎃䏄䏑䏊䏏䏈䏖䎃䎋䏕䏄䏇䎌
Fig. 2. Attachment of the motion sensors on the lower limbs
B. Temporal Parameters Estimation
The gait cycle is defined as the time interval between two
successive occurrences of one of the repetitive events of
walking [1]. Although any event could be chosen to define
the gait cycle, it is generally convenient to use the instant at
which one foot contacts the ground (‘initial contact’ or ‘heel
strike’). If it is decided to start with initial contact of the right
foot (represented as Rhs), then the cycle will continue until the
right foot contacts the ground again. The left foot, of course,
goes through exactly the same series of events as the right, but
displaced in time by half a cycle. The following terms are
used to identify major events during the gait cycle:
1. Initial contact (Rhs)
2. Opposite toe off (Lto)
3. Heel rise
4. Opposite initial contact (Lhs)
5. Toe off (Rto)
6. Feet adjacent
7. Tibia vertical
then back to 1. initial contact (sometimes it is known as
terminal contact). These seven events subdivide the gait
cycle into seven periods, four of which occur in the stance
phase, when the foot is on the ground, and three in the
swing phase, when the foot is moving forward through the
air. The stance phase, which is also called the support
phase or contact phase, lasts from initial contact to toe off.
2nd Rhs
1st Rhs
䎐䎔
䎐䎔䎑䎘
Swing L
䎐䎕
IDS
䎐䎕䎑䎘
䎐䎖
䎓
TDS
2nd Lto
䎵䎶
䎵䎷
䎯䎶
䎯䎷
1st Rto
䎘䎓
1st Lto
䎔䎓䎓
2nd Rto
䎔䎘䎓
䎕䎓䎓
䎕䎘䎓
䎶䏄䏐䏓䏏䏈䏖
Fig. 3. Trajectories of roll angles of motion sensors: the legend RT means the
data from the sensors on right thigh, RS for right shank, LT and LS has
similar meanings for left limbs.
Fig. 3 shows the trajectories of roll angles of the motion
sensors. The legend RT, RS mean the role angles of right
thigh and shank, respectively, similarly LT, LS represent the
rotation angle of left thigh and shank. As shown in (1) to (4),
if we detect four major walking events (Rhs/to, Lhs/to) from the
sensor data, the defined temporal parameters can be
calculated easily. We suggest that these events can be
detected by finding positive and negative peaks of the roll
trajectory, as shown in Fig. 3. From the kinematical model of
gait, the positive peak of the rotation angle of left shank can
be observed which is associated with the heel strike of left
limb (as shown ‘1st Lhs’ and ‘2nd Lhs’ on red color dotted line
in Fig. 3). Similarly the heel strike of right foot (Rhs) is
characterized by a positive peak of roll angle of right shank.
Toe off event is characterized by a negative peak of rotation
angle of thigh, for example Rto event occurred at a negative
peak of roll angle of right thigh (as shown ‘1st Rto’ and ‘1st Lto’
in Fig. 3).
From the facts, we can easily estimate the temporal gait
parameters such as GCT, ST, IDS, TDS by calculating
interval between the positive and negative peaks which
represent Lhs, Rto, Lto, and Rhs events, respectively.
C. Spatial Parameter Estimation
The spatial parameters of the gait include stride length,
range of shank rotation, and range of thigh rotation. Among
them, the stride length is most important and useful gait
parameter for both medical and computing field. The stride
length is the distance between two successive placements of
the same foot. It consists of two step lengths, left and right.
In order to estimate the stride length, we use two gait
models: one is for normal gait cycle [4], the other is for half
swing motion explained later. Fig. 4 shows a double
pendulum model used to calculate the stride length for normal
gait cycle. In this figure, L1 and L2 are lengths of the thigh and
shank, respectively. The stride length is broken into three
different segments, d1 to d3. The value of d1+d2 is estimated
during swing phase and d3 is estimated during the stance
phase. To estimate the stride length for the left foot, d1+d2 is
calculated by measuring the range of left thigh rotation (Į)
and shank rotation (ȕ) as follows:
( L1 L2 ) sin D
d2
L1 sin J L2 sin G
Right stance
Swing
left
d1
L1
L1
L1
ȕ
L2
L2
L2
į
d=d1+d2
L2
Ȗ
Fig. 4. Double pendulum model used to estimate stride length in normal gait
cycle
Left foot
Right foot
L1
L2
Į
L1
Ȗ
L2
G
d1
a 2 b 2 2 ab cos J
(6)
Here, the rotation angles of both thigh and shank (i.e., Į, ȕ,
Ȗ, į) can be calculated by differencing between the angles at
the detected walking events as follows:
Į = LT(Lhs(k)) – LT(Lto(k)), ȕ = LS(Lhs(k)) – LS(Lto(k))
Ȗ = RT(Lto(k)) – RT(Lhs(k)), į = RS(Lto(k)) – RS(Lhs(k)) (7)
where LT(Lhs(k)) represents the angle of thigh at when left
heel strike event occurs, similarly other angles can be
calculated.
From this gait model, we get a good estimation of stride
length in normal gait cycle, however, the length of the first
step cannot be included in this estimation. We therefore
propose a new double pendulum model for the first step,
referred to as the ‘first half swing’. Fig. 5 shows the proposed
gait model. The gait cycle starts with the left foot moving
from the standing pose, then ends the initial contact of left
foot (Lhs). It is different to measure the rotation angles of both
limbs from the normal gait model shown in Fig. 4. The stride
length of first half swing can be calculated as:
d2
d=d3
L1
Į
(5)
The stride length for right stance phase, d3 is calculated by
using the following (6) with the range of right thigh (Ȗ) and
shank (į) rotation:
L2 sin G / sin J , b L1 c
L1 L2 (1 cos G ) c cos J
Stride length
Stance
L2 L1 (1 sin( E D ) / sin(S E ))
c
a
Swing
left
Swing
a2 b2 2abcosE
a L2 L1 sin D / sin(S E )
d3
(8)
d3
d1 d2
b
d1
d2
Fig. 5. Proposed pendulum model for first half swing
Other spatial gait parameters such as stride velocity can be
calculated easily from the estimation of stride length, and
temporal parameters.
III.
EXPERIMENTAL RESULTS
A 37 year-old male subject with no known neurological or
orthopedic gait impairments participated in the validation of
this system. The height and weight of the subject is 170cm
and 67 kg, respectively, also the length of his thigh (L1) is
40cm, and the length of shank (L2) is 45cm. The gold
standard data were collected by using a motion capture
system called VICON system 1 , which can measure the
absolute position of multiple reflective markers attached on
body segments, as shown in Fig. 2.
The subject was asked to perform various gait trials as
follows:
z
Small stride length: two half swing steps and eight
normal gait cycles
1
http://www.vicon.com
Normal stride length: two half swing steps and four
normal gait cycles
z
Big stride length: two half swing steps and four normal
gait cycles
z
Slow speed : two half swing steps and six normal gait
cycles
z
Running : two half swing steps and four normal gait
cycles
The set of tasks consists of total 30 steps of normal walking
and six steps of running behaviors.
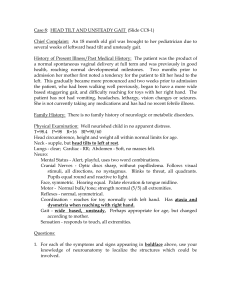
Fig. 6 shows the true values of each stride length and the
error for total 30 steps. As shown in Fig. 6, we could get
accurate estimation of the stride length despite its wide range
(405 ~ 1532 mm). The mean and standard deviation of error
were 21.7 mm (2.3% for the average value of true stride
lengths, 956 mm) and 46.1 mm, respectively. This shows the
promising result of the proposed method in spite of drift
problem of the motion sensor and inaccurate measurement of
length of shank and thigh. On the contrary, the mean and
standard deviation of error for 6 steps running behaviors were
210 mm and 293 mm, respectively. This means that the
proposed method is not valid for running behavior.
ACKNOWLEDGMENT
z
IV. CONCLUSION AND FUTURE DIRECTIONS
In conclusion, we developed the method to estimate a gait
cycle, stance, and initial/terminal double support time as
temporal parameters, and stride length as spatial parameter by
using four motion sensors fixed on both thighs and shanks.
The 2.3% average error in estimation of stride length of 30
steps could be obtained from the experiments.
Future work is expected to continue in the following
directions: adding more experiments for more subjects
including patients with mobile impairments, verifying the
accuracy of temporal parameters with more accurate gait
phase detection system, and finally, studying possibility of
our system for the assessment of physical activity under free
living conditions.
X_WW
X]WW
X[WW
㪪㫋㫉㫀㪻㪼㩷㫃㪼㫅㪾㫋㪿㩷㩿㫄㫄㪀
XYWW
XWWW
㪜㫉㫉
㪛㫋㫉㫌㪼
_WW
]WW
[WW
YWW
W
㪈 㪉 㪊 㪋 㪌 㪍 㪎 㪏 㪐 㪈㪇 㪈㪈 㪈㪉 㪈㪊 㪈㪋 㪈㪌 㪈㪍 㪈㪎 㪈㪏 㪈㪐 㪉㪇 㪉㪈 㪉㪉 㪉㪊 㪉㪋 㪉㪌 㪉㪍 㪉㪎 㪉㪏 㪉㪐 㪊㪇
TYWW
㪥㫌㫄㪹㪼㫉㩷㫆㪽㩷㫊㫋㪼㫇㫊
Fig. 6. Graph of true value and error for each step
This work was partly supported by the National Institute of
Information and Communications Technology, Japan, and
the Advanced Biometric Research Center (ABRC), KOSEF,
Korea. We would like to thank members of ATR Media
Information Laboratories, for their continuous support.
REFERENCES
Michael W. Whittle, Gait Analysis, 3rd Edition, Elseveir Science
Limited, 2002.
[2] Shinji Miyazaki, “Long-Term Unrestrained Measurement of Stride
Length and Walking Velocity Utilizing a Piezoelectric Gyroscope,”
IEEE Trans. on Biomedical Engineering, vol. 44, pp.753-759, August,
1997.
[3] R. Willianson and B.J. Andrews, “Gait event detection for FES using
accelerometers and supervised machine learning,” IEEE Trans. Rehab.
Eng., vol. 8, pp. 312-319, September 2000.
[4] M. M. Skelly and H.J. Chizeck, “Real-time gait event detection for
paraplegic FES walking,” IEEE Trans. Rehab. Eng., vol. 9, pp.59-68,
March 2001.
[5] Ion P.I. Pappas, et. al., “A Reliable Gyroscope-Based Gait-Phase
Detection Sensor Embedded in a Shoe Insole”, IEEE Sensors Journal,
vol. 4, no. 2, pp.268-274, April, 2004.
[6] Arash Salarin, H. Russmann, et. al., “Gait Assessment in Parkinson’s
Disease: Toward an Ambulatory System for Long-Term Monitoring”,
IEEE Trans. Biomedical Engineering, vol. 51, No. 8, pp.1434-1443,
August, 2004.
[7] B. Najafi, K. Aminian, et., al., "Ambulatory System for Human Motion
Analysis Using a Kinematic Sensor: Monitoring of Daily Physical
Activity in the Elderly," IEEE Trans. Biomedical Engineering, Vol. 50,
No. 6, pp. 711-723, June, 2003.
[8] Ling Bao and Stephen S. Intlle, “Activity Recognition from
User-Annotated Acceleration Data”, in Proc. Of Second International
Conference, PERVASIVE2004, pp. 1-17, Austria, April, 2004.
[9] Seon-Woo Lee and Kenji Mase, "Activity and Location Recognition
Using Wearable Sensors", IEEE Pervasive Computing, Vol. 1, No. 3,
pp. 24-32, July-September, 2002.
[10] NEC
Tokin’s
MDP-A3U9
User’s
Manual,
Available:
[1]
http://www.nec-tokin.com/english/product/pdf_dl/3DMotionD
K_e.pdf