as a PDF
advertisement

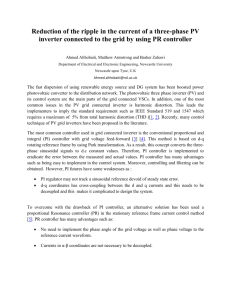
888 IEEE TRANSACTIONS ON POWER ELECTRONICS, VOL. 18, NO. 3, MAY 2003 Grid Current Regulation of a Three-Phase Voltage Source Inverter With an LCL Input Filter Erika Twining, Student Member, IEEE, and Donald Grahame Holmes, Member, IEEE Abstract—Many grid connected power electronic systems, such as STATCOMs, UPFCs, and distributed generation system interfaces, use a voltage source inverter (VSI) connected to the supply network through a filter. This filter, typically a series inductance, acts to reduce the switching harmonics entering the distribution network. An alternative filter is a LCL network, which can achieve reduced levels of harmonic distortion at lower switching frequencies and with less inductance, and therefore has potential benefits for higher power applications. However, systems incorporating LCL filters require more complex control strategies and are not commonly presented in literature. This paper proposes a robust strategy for regulating the grid current entering a distribution network from a three-phase VSI system connected via a LCL filter. The strategy integrates an outer loop grid current regulator with inner capacitor current regulation to stabilize the system. A synchronous frame PI current regulation strategy is used for the outer grid current control loop. Linear analysis, simulation, and experimental results are used to verify the stability of the control algorithm across a range of operating conditions. Finally, expressions for “harmonic impedance” of the system are derived to study the effects of supply voltage distortion on the harmonic performance of the system. Index Terms—Current regulation, grid connection, harmonic distortion, LCL filter, linear analysis, voltage source inverter . I. INTRODUCTION P OWER electronic converters are now used in many grid-connected applications including STATCOMs, UPFCs, and active interfaces for distributed generation systems (e.g., PV, wind etc.). These converters are commonly based on a voltage source inverter (VSI) connected to the supply network, operated to achieve objectives such as power flow regulation or power factor optimization by regulating the current into the grid using schemes such as synchronous frame controllers, Predictive Current deadbeat control, or hysteresis-based strategies. Typically, simple series inductors are used as the filter interface between the VSI and the grid network. However, these filters require high switching frequencies to acceptably attenuate switching harmonics, particularly in weak-grid applications where the supply is sensitive to these harmonics. In contrast, the alternative LCL form of low-pass filter offers the potential for improved harmonic performance at lower switching frequencies, which is a significant advantage Manuscript received June 14, 2002; revised November 1, 2002. This work was supported by the Australian Research Council. This paper was presented at PESC’02, Cairns, Australia, June 23–27, 2002. Recommended by Associate Editor J. H. R. Enslin. The authors are with the Department of Electrical and Computer Systems Engineering, Monash University, Clayton Campus, Victoria 3800, Australia (e-mail: erika.twining@eng.monash.edu.au). Digital Object Identifier 10.1109/TPEL.2003.810838 in higher-power applications [1], [2]. However, systems incorporating LCL filters require more complex current control strategies to maintain system stability, and are more susceptible to interference caused by grid voltage harmonics because of resonance hazards and the lower harmonic impedance presented to the grid. Reference [3] has shown how an inner “lag-lead” compensation loop on the capacitor voltage of the LCL filter of a threephase grid-connected VSI actively damps the filter resonance and improves the stability of the control system. Similar results have been achieved for single and three-phase grid-connected VSI systems using an inner capacitor current feedback loop [4], and in a number of single-phase uninterruptible power supply (UPS) applications [5]. However, these systems control the filter capacitor output voltage rather than the grid current and are therefore not directly applicable for grid power flow control. Multi-variable control strategies have been proposed to regulate the grid current for VSIs connected through LCL filters [1], but these strategies are complex and sensitive to variations in system parameters. More recently, an analytical study of grid connected active rectifiers with LCL input filters incorporating PI-based controls has been presented [2]. However, this work still only considers the regulation of the ac current out of the inverter, rather than the current into the grid after the filter. This paper proposes a robust strategy for regulating the grid current of a converter connected to an electrical network through a LCL filter. The essence of the scheme is to use a synchronous frame PI (SRFPI) controller to regulate the grid current, together with a simple inner capacitor current regulating loop to stabilise the system. To determine the transient performance of the system, a P Resonant controller is considered first. Unlike the SRFPI controller, the P Resonant controller can be easily reduced to a single-phase equivalent system so that conventional stability analysis techniques may be applied. Stable operation of this controller at fundamental frequency is confirmed using a linearised model of the inverter/grid system. Then, using the knowledge that the P Resonant controller has similar performance characteristics to the SRFPI controller [6], stability analysis for this controller is shown to be sufficient to predict the stability of a SRFPI controller. Next, reduced quality current regulation caused by grid supply voltage harmonics is investigated by determining the harmonic impedance of the proposed control strategy, and methods of tuning the current regulator to mitigate this distortion are considered. Finally, the experimental results obtained using a DSP control platform are presented to verify the robustness of the proposed 0885-8993/03$17.00 © 2003 IEEE TWINING AND HOLMES: GRID CURRENT REGULATION Fig. 1. 889 Three-phase VSI system. control algorithm and to study the system’s harmonic performance at a practical level. II. SYSTEM MODELLING Fig. 1 shows the converter system considered in this investigation, comprising a standard three-phase VSI driven from a constant voltage DC bus and connected to the grid through a LCL filter. Note that the assumption of a constant dc voltage is reasonable if the dc capacitance is large or if dc bus voltage ripple compensation is included within the PWM control algorithm. For this investigation, it is further assumed that the system is balanced, and that the VSI switching frequency is sufficiently high that it will have negligible effect on the inverter control loop dynamics. Under these assumptions, the converter system can be represented using a linearized “average switching model (ASM),” where the inverter switches are replaced by a function representing their averaged value over each carrier interval. Provided the controller does not saturate the VSI output, this linearised inverter model has been shown to achieve very accurate results in this type of application [7]. Furthermore, the ASM approach allows classical stability analysis techniques to be used to investigate the system fundamental, transient and harmonic responses, and it is easily implemented in a simulation package such as Matlab Simulink with greatly reduced simulation times compared to full switched models. III. CONTROL STRATEGY The primary aim of the control scheme is to modulate the inverter to regulate the magnitude and phase angle of the grid supply current, so that the real and reactive power entering the network can be controlled. It is known already that direct feed- back control of the grid current is unstable [4]. However, control of this current should be possible in the same way as voltage regulation for a UPS is achieved [5], by making an outer grid current feedback controller drive an inner capacitor current regulating loop. Fig. 2 shows an ASM single-phase equivalent representation of the controller/inverter system, where represents the grid current reference signal. From this figure, it can be seen how the “outer” grid current feedback loop provides a reference value, , to the “inner” capacitor current feedback loop and the output of the inner loop then determines the VSI output voltage, . Representing the system with this single-phase model allows it to be analyzed using conventional stability analysis techniques. The inner loop has a simple proportional gain transfer function, since it only stabilises the control system and its steadystate errors do not affect the accuracy of the outer control loop. The outer loop is shown in Fig. 2 as a generic transfer func. This transfer function could be the single phase tion equivalent of a SRFPI controller, but this has the complication of being difficult to model because of dependencies between the three phases. For simplicity, it would be preferable to use a current regulation scheme that is independent between phases, such as a P Resonant controller, which is equally applicable to single or three phase systems. This also has the benefit that since these two controllers are known to have almost identical stationary frame performance characteristics [6], single-phase stability analysis of a P Resonant scheme can then directly be applied to determine the transient performance of a SRFPI controller. This is the approach used here. A. SRFPI Controller Model SRFPI controllers are commonly used in three-phase systems and operate by transforming the three-phase ac currents into 890 Fig. 2. IEEE TRANSACTIONS ON POWER ELECTRONICS, VOL. 18, NO. 3, MAY 2003 Single-phase representation of proposed control strategy (notation defined in Fig. 1). DC components in the synchronously rotating frame so that the steady-state error that is normally associated with the application of PI control to ac quantities can be eliminated [6]. The strategy also has the particular advantage of independent control of the real and reactive current components, which translates directly to real and reactive power flow control. This is advantageous for this application, where the grid supply currents can be directly regulated in the synchronous frame and transferred back into the stationary frame to provide references for the simple inner loop (single-phase) capacitor current controllers as shown in Fig. 3. The transfer function of a SRFPI controller in the rotating frame is given by (1) Fig. 3. Synchronous reference frame PI control strategy (notation defined in Fig. 1). transient performance can be readily analyzed using classical control theory (3) Using the transformation techniques described in [6], the equivalent stationary - - frame representation of the SRFPI controller can be developed as (2). It is this form that is used to compare the transient performances of the SRFPI and the P Resonant controllers in Section IV. The main concern with (2), shown at the bottom of the page, is the significant off-diagonal terms, which represent cross coupling between phases and make an ASM single-phase representation difficult. B. P Resonant Controller Model In contrast, the P Resonant controller transfer function, given by (3), is already in the stationary frame and is independent between phases. This transfer function has infinite gain at fundamental frequency and therefore also eliminates steady state error [6], while the phase independence means that its IV. STABILITY ANALYSIS OF SINGLE PHASE MODEL The open-loop and closed-loop transfer functions of a single phase ASM of the system with a P resonant controller are given by (4) and (5), respectively, as shown at the bottom of the next , , page, where: , . Analysis of this system has determined that its stability is pri, as marily determined by the outer loop proportional gain illustrated in Fig. 4 which shows how the position of the closed for three difloop poles of the P Resonant system vary with ferent values of (see Section VI for component values). In all between zero and approxthree cases the system is stable for imately one (per unit). Based on these results, an initial value of (2) TWINING AND HOLMES: GRID CURRENT REGULATION 891 (a) (b) (c) Fig. 4. Variation of P+resonant VSI system closed loop poles with control parameter K 0 < K < 10. (c) K = 100, K = 50, 0 < K < 10. was chosen for the simulation and experimental work presented here. This value was later increased to achieve an improved harmonic response as described in Section V. The primary function of the inner loop gain, , is to damp the resonant peak introduced by the LCL input filter as shown also contributes to the overall loop in Fig. 5. However, as gain, increasing its value can compromise the system stability. was chosen to achieve a suffiTherefore a value of . (a) K = 20, K = 50, 0 < K < 10. (b) K = 50, K = 50, ciently damped response at the resonant frequency of the LCL filter whilst maintaining an acceptable phase margin. The integral gain, , of the controller acts to eliminate steady state error at the fundamental frequency. Due to the complexity of the plant transfer function, simulation and experimental techniques were used to tune this value. The integral gain required to achieve a good steady-state and transient . response was found in this way to be (4) (5) 892 IEEE TRANSACTIONS ON POWER ELECTRONICS, VOL. 18, NO. 3, MAY 2003 Fig. 5. Variation of open-loop frequency response with control parameter ( 0:5, K = 50). K = K From (2), it can be seen that the diagonal terms of the SRFPI controller are the same as the (single-phase) transfer function of the P Resonant controller (3) apart from a scaling factor. It is these diagonal terms that lead to the same steady-state response of zero steady-state error at the fundamental frequency. However, it would be expected that the cross coupling terms of the SRFPI controller might cause some differences between the transient performances of the two controllers, and hence this issue needs to be considered further, as follows: Fig. 6 shows the open-loop frequency response for both the P resonant and SRFPI controllers, where it can be seen that the cross-coupling terms of the SRFPI system have only a small influence on the performance of the controller around the fundamental frequency. Outside of this region, the frequency response of the two controllers is practically identical. This suggests that the transient analysis of the single-phase P Resonant controller can be directly applied to the SRFPI controller, and hence that the stability of the SRFPI control algorithm is also primarily de. termined by outer loop proportional gain V. GRID CURRENT CONTROL UNDER DISTORTED SUPPLY CONDITIONS Previous experimental investigations have shown that even small levels of supply voltage distortion can result in significant current distortion using current regulators that are tuned for a fundamental response [7]. The work reported here has identified that this distortion comes about because the control schemes described in the previous section have a limited bandwidth and are therefore unable to adequately compensate for grid supply voltage harmonics. It is noted in passing that most previous studies in this area have assumed a sinusoidal fundamental supply, and appear not to have considered the effect of grid network harmonic voltages. A. Calculating Harmonic Impedance The sensitivity of each controller to grid harmonic distortion can be investigated by calculating its “harmonic impedance,” Fig. 6. Open-loop frequency response of proposed control strategies. i.e., the relationship between a harmonic voltage disturbance into the system, and the resultant injected grid current harmonic component. This impedance provides a simple measure of the harmonic sensitivity of a current regulation scheme, and is a useful tool to assist with the design of AC filters to achieve acceptable levels of harmonic distortion. With some manipulation, the harmonic impedance for each phase of the P Resonant system described in Section III-B can be shown to be (6). Similarly, from (2), the harmonic impedance matrix for the SRFPI controller can be derived as (7). With further algebra, the diagonal terms of (7) can be shown to be equivalent to that of the P Resonant converter (6). Finally, the results from the previous section suggest that the cross-coupling terms will have negligible influence on the performance of the SRFPI controller at harmonic frequencies. Hence it is reasonable to conclude that analysis of the P Resonant system is sufficient to predict the harmonic performance of the SRFPI system also. See (6) and (7) shown at the bottom of the next page, where , , and are defined in Section IV. refers to the th element of the transfer function matrix given in (5). B. Mitigation of Harmonic Distortion In order to minimize the harmonic current distortion produced by the converter system under distorted supply conditions, the harmonic impedance should ideally be infinite for all low order harmonics. In other words, the inverter should produce zero harmonic current for all values of harmonic supply distortion. In practice, Fig. 7 shows the harmonic impedance magnitude and phase verses frequency for two . It can be seen from this figure that while the values of harmonic impedance goes through a minimum close to the , its absolute magnitude generally LCL resonant frequency, increases. Hence the grid current distortion increases as caused by grid supply harmonics will decrease for a higher . But the transient system response will proportional gain also become more underdamped as this gain increases. Fig. 8 shows the SRFPI controller transient response for and with a 2% 5th harmonic values of TWINING AND HOLMES: GRID CURRENT REGULATION Fig. 7. Harmonic (ohms/degrees). system impedance for + P resonant 893 (a) controller and a 1% seventh harmonic in the grid supply voltage. While the current distortion has been reduced from 7.8% to 5.2% as increases, the transient response is correspondingly more oscillatory. These results show the tradeoff that can be made between a regulator’s harmonic performance and its transient response when operating into a distorted supply. In [8] it was shown that converter devices can be used as “harmonic current sinks” within a distribution system and thereby reduce the levels of harmonic voltage distortion at the point of common coupling. In contrast to the harmonic current mitigation described above, this filtering application requires that the harmonic impedance of the converter system be minimized. However, careful design is required to avoid overloading the inverter and causing harmonic voltage magnification at other points within the distribution system. The harmonic impedance derived above also provides a useful tool for further investigating (b) Fig. 8. VSI transient response for 2% fifth and 1% seventh supply distortion. ( = 20 = 50). (a) = 0:5. (b) K = 1:0. K K K (6) (7) 894 IEEE TRANSACTIONS ON POWER ELECTRONICS, VOL. 18, NO. 3, MAY 2003 Fig. 10. Grid current harmonic spectra for Fig. 9. Grid current waveform for K. K. these effects of converter systems on the harmonic voltage distortion levels within distribution systems. However, such investigation is beyond the scope of this paper. VI. EXPERIMENTAL VERIFICATION An experimental platform based on a DSP controller was used to confirm the accuracy of the ASM analysis described above, and to test the practical robustness and harmonic performance of the control algorithms developed. The particular circuit pamH, mH, F, rameters are F (the supply variac inductance was used as inof the LCL filter). The system is rated at 10 kVA and ductor has a 415 V supply voltage and a 700 V dc bus. A SRFPI controller was implemented for the outer grid current regulation, with an additional PI controller to maintain the dc link voltage at the specified value. This controller acts as an outer control loop, providing the real current demand to the SRFPI controller. (Note that in a complete system, the bulk of the real and reactive current references would be generated by higher-level control loops. However, the operation of these control loops is beyond the scope of this paper, so simple default values were used.) The operation of the dc voltage control loop was also decoupled from the current regulator by giving it a significantly longer time constant. To load the system, the dc link of the converter system was simply connected to a resistor, and the inverter then acted as an active rectifier. However, since a VSI is of course implicitly bidirectional, the results are readily applicable to any type of grid-connected application. Fig. 9 shows the measured supply phase current for a step change in the reactive current reference, . The real current reference, , is supplied by the dc voltage controller. These results confirm that the proposed control algorithm is stable at full supply voltage, achieves zero steady state error at fundamental frequency and has a good transient response as anticipated. However, it can be seen that the measured phase currents have significant levels of harmonic distortion. For this test, the supply voltage distortion was measured at approx. 2.3% with the fifth and seventh harmonics dominating. Fig. 10 shows the K. Fig. 11. Grid current waveform for 2 Fig. 12. Grid current harmonic spectra for 2 K. harmonic spectra of the phase current distortion, with fifth and seventh harmonic distortion caused by the supply voltage harmonics and a total harmonic distortion (THD) of 10.5%. Figs. 11 and 12 show the improvement that was achieved by doubling , to achieve a reduced harmonic curthe proportional gain is still well rent distortion of THD 6.7%. This increased within the stability margin, since there is no significant transient TWINING AND HOLMES: GRID CURRENT REGULATION oscillation visible in Fig. 9. It is further noted that the reference signal in both cases contains a small level of harmonic distortion (THD 2%). This is, in part, due to the ripple in the dc bus voltage. It is expected that this distortion would be minimized by signal through a low pass filter. This would furpassing the ther reduce the levels of grid current distortion without affecting the performance of the dc voltage controller significantly. VII. CONCLUSION This paper has presented a robust control algorithm to regulate the grid current entering a distribution network from a three-phase VSI system via an LCL input filter. Linear analysis, simulation and experimental results are used to verify the stability of the algorithm across a range of operating conditions. Expressions for “harmonic impedance” of the system are derived to study the effects of supply distortion on the harmonic performance of the system. It is shown that the controller can be tuned to achieve an improved overall response when operating into a distorted supply, at the expense of some reduction in transient stability margins. Hence, an acceptable harmonic performance can still be achieved with a lower value of input inductance than would be required for a simple inductive filter, which offers potential for significant reductions in filter cost. REFERENCES [1] M. Lindgren and J. Svensson, “Control of a voltage-source converter connected to the grid through an LCL-filter-application to active filtering,” in Proc. Power Electron. Spec. Conf. (PESC’98), Fukuoka, Japan, 1998. [2] M. Liserre, F. Blaabjerg, and S. Hansen, “Design and control of an LCLfilter based three-phase active rectifier,” in Proc. 2001 IEEE Ind. Applicat. Conf., 2001, pp. 297–307. [3] V. Blasko and V. Kaura, “A novel control to actively damp resonance in input lc filter of a three-phase voltage source converter,” IEEE Trans. Ind. Applicat., vol. 33, pp. 542–550, 1997. [4] N. Abdel-Rahim and J. E. Quaicoe, “Modeling and analysis of a feedback control strategy for three-phase voltage-source utility interface systems,” in Proc. 29th IAS Annu. Meeting, 1994, pp. 895–902. [5] P. C. Loh, M. J. Newman, D. N. Zmood, and D. G. Holmes, “Improved transient and steady state voltage regulation for single and three phase uninterruptible power supplies,” in Proc. 32nd Ann. IEEE Power Electron. Spec. Conf. (PESC’01), 2001. [6] D. Zmood, D. Holmes, and G. Bode, “Frequency-domain analysis of three-phase linear current regulators,” IEEE Trans. Ind. Applicat., vol. 37, pp. 601–610, 2001. 895 [7] E. Twining, “Modeling grid-connected voltage source inverter operation,” in Proc. AUPEC’01, 2001, pp. 501–506. [8] H. Akagi, H. Fujita, and K. Wada, “A shunt active filter based on voltage detection for harmonic termination of a radial power distribution line,” IEEE Trans. Ind. Applicat., vol. 35, pp. 638–645, 1999. Erika Twining (S’02) received the B.Eng. and M.Eng.Sc. degrees from the University of Melbourne, Parkville, Australia, in 1995 and 2000, respectively, and is currently pursuing the Ph.D. degree in the Department of Electrical and Computer Systems Engineering, Monash University, Clayton, Australia. She was a Graduate Electrical/Instrument Engineer at Orica Pty., Ltd., from 1996 to 1998. During this time, she worked at a number of manufacturing sites in Victoria and NSW, Australia, where she was involved in the design and maintenance of power distribution and process control systems. Her major research interests include grid connected PWM converters, distributed generation, power quality, and voltage compensation in weak distribution networks. Donald Grahame Holmes (M’87) received the B.S. degree and M.S. degree in power systems engineering from the University of Melbourne, Melbourne, Australia, in 1974 and 1979, respectively, and the Ph.D. degree in PWM theory for power electronic converters from Monash University, Victoria, Australia, in 1998. He worked for six years with the local power company developing SCADA systems for power transmission networks, before returning to the University of Melbourne as a faculty member. In 1984, he moved to Monash University to work in the area of power electronics, and he is now an Associate Professor. He currently heads the Power Electronics Research Group, Monash University, where he manages graduate students and research engineers working together on a mixture of theoretical and practical R&D projects. The present interests of the group include fundamental modulation theory, current regulators for drive systems and PWM rectifiers, active filter systems for quality of supply improvement, resonant converters, current source inverters for drive systems, and multilevel converters. He has a strong commitment and interest in the control and operation of electrical power converters. He has made a significant contribution to the understanding of PWM theory through his publications and has developed close ties with the international research community in the area. He has published over 100 papers at international conferences and in professional journals, and regularly reviews papers for all major IEEE TRANSACTIONS in his area. Dr. Holmes is an active member of the IPC and IDC Committees of the IEEE Industrial Applications Society.