Intelligent Control of DFIG based Variable Speed Wind Turbine
advertisement

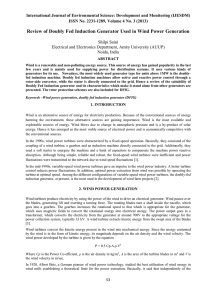
Proceedings of the 2014 International Conference on Power Systems, Energy, Environment Intelligent Control of DFIG based Variable Speed Wind Turbine System using Artificial Neural Network Sathansa and Jitender Rohillab a. is Professor with the Department of Electrical Engineering, National Institute of Technology, Kurukshetra-136119, INDIA (phone: +91-1744-233390; fax: +91-1744-238050; e-mail: sathans@ rediffmail.com). b. Jitender Rohilla was M. Tech. Student with the Department of Electrical Engineering, National Institute of Technology, Kurukshetra-136119, INDIA (e-mail: jiturohilla@gmail.com). Abstract— In this paper, intelligent control scheme using artificial particle swarm optimization (PSO) to design the optimal PI controllers for the rotor side converter and grid side converter of DFIG for a particular wind speed. In [8], the authors used intelligent control techniques for the variable speed cage machine used for the wind generation system, in which a cage induction machine is considered and a fuzzy control system is used to drive the wind energy conversion system to the point of maximum energy capture for a given wind velocity. Fuzzy logic is used to develop an advanced and intelligent control strategy for a line excited cage generator system used for wind power applications in [9]. In [10], ANN control technique has been developed for DFIG based wind energy generation system. This paper presents the design and implementation of intelligent control scheme using ANN for DFIG based variable speed wind turbine system. The first part of the paper explains the modeling of wind turbine and ANN based rotor loop design and the second part illustrates the modeling and implementation of ANN based intelligent rotor control of DFIG. The conventional vector control scheme is also implemented on the same system to present the comparative analysis of performance with the proposed ANN based control scheme. It is demonstrated through results that the ANN based control scheme ensures better stability and regulation of the power generated by the DFIG based wind turbine system. neural network (ANN) is proposed for doubly fed induction generator (DFIG) based variable speed wind turbine system. ANN based rotor loop design is developed for variable speed wind turbine and the rotor side controller is proposed for DFIG to improve its transient performance in all wind speed conditions. For comparative analysis, the conventional vector control scheme is also implemented for the system under investigation. It is observed, from the results, that the dynamic performance of the DFIG is improved with the proposed intelligent control scheme, as compared to the conventional control. The simulations are carried out using MATLAB platform. Keywords— Artificial neural network (ANN), Doubly fed induction generator (DFIG), Intelligent control, Variable speed wind turbine, Vector control. I. INTRODUCTION I N recent years, exploitation of fossil fuel is on the rise leading to the increased air pollution by greenhouse gases. As an alternative, renewable energy systems, especially wind energy generation, have attracted great interests. Large wind farms have been installed or planned across the globe and the power ratings of the wind turbines are increasing. Wind power installed capacity is growing at the rate of 20% annually on the average around the world, and its cost has decreased 50% in the last 10 years [1]. In wind farms, wind turbines based on DFIG, with converters rated at 25% - 30% of the generator rating, are used as compared to wind turbines using a fixed speed induction generator, due to variable speed operation, four-quadrant active and reactive power capabilities, lower converter costs, lower power losses, higher efficiency, reactive power production, and flexible control of DFIG [2-4]. Many researchers have attempted to improve DFIG transient performance by developing different control schemes in the past. In [5], the authors investigated and compared the different crow bar protections and rotor side converter restart schemes to improve DFIG transient performance. A new series and parallel connected grid side converters with conventional DFIG was developed to damp out the stator and rotor currents oscillations in [6]. The authors in [7] used ISBN: 978-1-61804-221-7 II. MODELING OF WIND TURBINE Wind turbines produce electric power by using the power of the wind to drive an electrical generator. The power contained in the wind is given by the kinetic energy of the flowing air mass per unit time [11] and is given as: 166 Proceedings of the 2014 International Conference on Power Systems, Energy, Environment Under rated wind speed conditions, pitch angle β is considered zero. Therefore, the three-dimensional relationship of Cp, λ and β turns to the two-dimensional relationship of Cp and λ, and for wind speed conditions Although Eq. (1) gives the power available in the wind, above rated speed, pitch angle β is controlled to get the power transferred to the wind turbine rotor is reduced steady by the power coefficient, output power. Because the wind power generation is a complex nonlinear system, ANN based control method is proposed in this paper. ANN offers many advantages over nonlinear adaptive controllers in terms of robustness, improved performance, learning capabilities, and increased flexibility [13]. Fig. 1 shows the systematic diagram of ANN implementation to obtain Cp vs. λ characteristics of wind turbine at different β. Where, is the power contained in wind (in watts) , ρ is the air density (1.225 kg/m3 at 15°C and normal λ pressure), A is the swept area in square meter, and V is β the wind velocity in m/sec. Fixed pitch wind turbine has ANN Cp been modeled to drive the DFIG. The number of blades Fig 1 ANN block for Cp vs. λ characteristics are considered as 3, blade radius is considered as 13m with fixed pitch as ( = 0) [12]. Cp is calculated as The Cp (λ, β) curves are known for some discrete values of β( β =0….20). The discrete values are used as training data for the ANN. The neural network has two inputs, λ and β, and one output Cp, and it consists of two Where, C1=0.5176, C2=116, C3=0.4, C4=5, C5=21, C6=0.0068 hidden layers. The standard back-propagation algorithm is used for learning. The neural network, so designed, is able to produce a power coefficient for any value of tip speed ratio in the range [0...20] and for any continuous And turbine torque is pitch value in the range [0...20]. Obtained with ANN, the Fig 2 shows the Cp vs. λ characteristics of wind turbine at different β. Where, The relationship of Cp, λ and β is nonlinear. The tip speed ratio is given by: Where, R= radius to tip of rotor ISBN: 978-1-61804-221-7 167 Proceedings of the 2014 International Conference on Power Systems, Energy, Environment referred to the stator side. The stator and rotor voltages Cp(lambda) 0.5 B=0 B=5 B=10 B=15 B=20 0.45 0.4 0.35 are expressed as [15]: Cp 0.3 0.25 0.2 0.15 0.1 0.05 0 0 2 4 6 8 lambda 10 12 14 16 Fig 2. Cp vs. λ characteristics of wind turbine at different β. III. The flux linkage equations of the stator and rotor can be related to their currents and are expressed as: MODELLING OF DFIG DFIG is basically a wound rotor induction machine in which stator is directly connected to the grid, and the connection of the rotor to the grid is via a back- to-back (PWM) convertor as shown in Fig. 3. Where Lss = Ls +Lm and Lrr = Lr + Lm The electromagnetic torque developed is expressed as: Where, Tm is positive for motoring operation and negative for generator operation. Equations (8) to (16) are the set of differential equations which represent a 4th order model for describing the dynamic behavior of DFIG. These equations are simulated in MATLAB to Fig.3 Schematic diagram of a DFIG-based wind energy develop a model of the DFIG for analysis. In the generation [14]. simulated model, the mechanical torque, the stator and rotor input voltages and the synchronous speed are the The DFIG is modeled same as induction machine. inputs and the electromagnetic torque, the stator and Stator and rotor windings are identical, sinusoidally rotor currents and the rotor speed act as the outputs. distributed and displaced 120 degree apart. In order to The model can be run in sub-synchronous as well as in explain the actual behavior of the DFIG, dynamic super-synchronous mode. In sub-synchronous mode (ωe equations are considered for more realistic observation. >ωr ) positive load torque will operate the model as a From the control point of view of the machine, the d-q motor while in super-synchronous mode (ωr >ωe ) a representation of an induction machine leads to control negative load torque will operate the model as a flexibility. The dynamic behavior of the DFIG in generator. The power flow scheme of both operating synchronous reference frame can be represented by the modes is shown in Fig 4 [16]. Park equations provided all the rotor quantities are ISBN: 978-1-61804-221-7 168 Proceedings of the 2014 International Conference on Power Systems, Energy, Environment And Now by using eq. (21-24) the eq. (19-20) are: Fig.4 Power flow of a DFIG system [16]. IV. CONTROL SCHEME OF DFIG Power regulation between the generator and the grid is an essential requirement when DFIG is connected to an existing grid [17]. The control technique can be applied on both rotor side converter (RSC) and grid side converter (GSC). The objective of the RSC is to control both the active and reactive powers independently; while the objective of the GSC is to keep the dc-link voltage constant, regardless of the magnitude and direction of the rotor power. This control technique is called vector control technique and is a conventional technique. In this paper, the main focus is the design of the ANN based RSC controller. by solving these eq. we have: A. Conventional RSC Controller Design In order to achieve a decouple control of active and reactive power; stator flux oriented vector control scheme is adopted. In the stator-flux oriented reference frame, the d-axis is aligned with the stator flux linkage vector s, namely, ds = s and qs = 0. Stator voltage drop across resistance has been neglected [18]. The frequency and amplitude of the stator or grid voltage is assumed constant. Thus Vds = 0, Vqs = Vs and ds = s , qs = 0. Neglecting the stator resistance, Rs =0, then eq. (8) to (15) become ISBN: 978-1-61804-221-7 169 Proceedings of the 2014 International Conference on Power Systems, Energy, Environment Fig.5 Vector control scheme of RSC 0 B. Proposed ANN controller -1 ANNs are powerful tools for modelling. ANNs can identify and learn correlated patterns between input data sets and corresponding target values. After training, ANNs can be used to predict the outcome of new independent input data [19]. In this paper, the data set from Conventional PI controller is used to train ANN structure, with one input layer and one output layer and number of hidden neurons as two, using Levenberg-Marquardt back propagation method. In the training process, 70% data is used for training, 15% is used for validation and 15% is used for testing. The ANN speed control technique block in a vector controlled drive system is shown in Fig. 6. The controller observes the pattern of speed loop error signal and correspondingly updates the output so that matches the reference speed . actual speed Torque -2 -3 -4 -5 -6 -7 0 0.2 0.4 0.6 0.8 1 Time 1.2 1.4 1.6 1.8 2 7 8 9 10 8 9 10 Fig. 8 Mechanical input torque ωr_ref + * output irq + Input - 2500 - ANN 2000 ωr irq Wr 1500 1000 Fig.6 Proposed ANN control structure. 500 V. RESULTS AND DISCUSSION 0 Simulation studies are carried out on a 3hp DFIG and its control scheme is implemented in MATLAB environment. The parameters used are given in Appendix. When, after 5 sec, there is a step change in wind velocity from 12 m/s to 10 m/s, the simulation results with conventional PI tuned controller are shown in Fig. 9-12. 0 1 2 3 4 5 Time 6 Fig. 9 Rotor speed with conventional PI controller 180 160 140 13 120 100 Te 12.5 12 80 60 wind speed 11.5 40 11 20 0 10.5 -20 10 9.5 9 0 1 2 3 4 5 Time 6 7 Fig.10 Torque with conventional PI controller 0 1 2 3 4 5 time 6 7 8 9 10 Fig. 7 Wind velocity ISBN: 978-1-61804-221-7 170 Proceedings of the 2014 International Conference on Power Systems, Energy, Environment 100 200 80 60 150 Electromagnetic torque (Te) Rotor Current (Ir) 40 20 0 -20 -40 -60 -80 -100 100 50 0 0 0.2 0.4 0.6 0.8 1 Time 1.2 1.4 1.6 1.8 2 -50 Fig.11 Rotor current without ANN 0 1 2 3 4 5 Time 6 7 8 9 10 1.4 1.6 1.8 2 1.8 2 Fig. 14 Torque with ANN control scheme 100 80 60 Stator Current (Is) 40 20 100 0 80 -20 60 -40 40 -80 20 -100 0 0.2 0.4 0.6 0.8 1 Time 1.2 1.4 1.6 1.8 2 Rotor Current -60 0 -20 -40 Fig.12 Stator current with conventional PI controller -60 -80 The results with the proposed ANN control scheme are shown in Fig. 13-16. -100 0 0.2 0.4 0.6 0.8 2500 1.2 Fig. 15 Rotor current with ANN control scheme 2000 Rotor speed (Wr) 1 Time 1500 100 80 1000 60 0 0 1 2 3 4 5 Time 6 7 8 9 10 Stator Current (Is) 40 500 20 0 -20 -40 -60 Fig.13 Rotor speed with ANN control scheme -80 -100 0 0.2 0.4 0.6 0.8 1 Time 1.2 1.4 1.6 Fig. 16 Stator Current with ANN control scheme From Fig. 9-16, it is evident that the disturbances caused in the rotor speed, electromagnetic torque, stator and rotor current ISBN: 978-1-61804-221-7 171 Proceedings of the 2014 International Conference on Power Systems, Energy, Environment [12] K. Trinadha, A. Kumar, K. S. Sandhu, “ Study of Wind Turbine based SEIG under Balanced/Unbalanced Loads and Excitation” International Journal of Electrical and Computer Engineering (IJECE) Vol.2, No.3, June 2012, pp. 353~370 ISSN: 2088-8708 [13] WEI Zhi-nong, YU Xiao-yong, WU Jia-jia, HAN Lian-shan, XIE Xiang, CHE Dan, WANG Yue “The Intelligent Control of DFIG-Based Wind Generation”. [14] Tarek Medalel Masaud1, Student Member, IEEE And P.K. Sen2, Fellow IEEE”Modeling And Control Of Doubly Fed Induction Generator For Wind Power” [15] Md. Arifujjaman, m.T. Iqbal,john E. Quaicoe “Vector Control Of A Dfig Based Wind Turbine” Istanbul University Journal Of Electrical & Electronics Engineering. [16] Srirattanawichaikul,W, Kumsuwan Y, Premrudeepchacharn S,and Wu B,”A Vector Control of A Grid Connected 3L-NPC-VSC with DFIG Drives.”,(ECTI-CON) International Conference, pp .828,May 2012. [17] Lie Xu, Cartwright P, “Direct Active and Reactive Power Control of DFIG for Wind Energy Generation”, IEEE Transactions on Energy Conversion, Vol. 21( 3), September 2006. [18] Mohamed, M.B., Jemli, M., Gossa, Jemli, K., “Doubly fed induction generator (DFIG) in wind turbine modeling and power flow control,” Proceedings of the IEEE International Conference on Industrial Technology 2004, AL; USA, Vol: 2, pp. 580-584, 2004. [19] S. Haykin, “Neural Networks: A Comprehensive Foundation,” New Jersey: Prentice-Hall, 1999. are smoothened and with the use of the ANNs and less oscillatory as compared to conventional PI controller. VI. CONCLUSION An ANN based speed control scheme of DFIG, driven by a wind turbine, has been developed. The developed ANN control scheme has reasonable accuracy and simple structure. The comparative analysis of the performance with the intelligent and conventional controllers shows that ANN is very effective on the stabilization of the system. APPENDIX Stator Voltage Rs Rr Xs Xm Xr No of pole pair J (Inertia constant) 220V 0.435 ohm 0.816 ohm 0.446 ohm 0.43 ohm 0.446 ohm 2 0.08 kg.m2 REFERENCES [1] “Global wind energy outlook 2008”, Global Wind Energy Council, Oct. 2008(available online at http://www.gwec.net /index.php?id=92). [2] Lie Xu, Phillip Cartwright, “Direct Active and Reactive Power Control of DFIG for Wind Energy Generation”, IEEE Transactions on Energy Conversion, Vol. 21, No.3, September 2006. [3] Muller S., Deicke M. "Doubly fed induction generator systems for wind turbines," IEEE industry application magazine, May /June 2002. [4] F. Mei and B. C. Pal, “Modeling analysis of grid connected doubly fed induction generator”, IEEE Transactions on Energy Converse., Volume 22, No. 3, pp. 728-736, Sep 2007. [5] Mustafa Kayikçi, J.V.Milanovic, “Assessing Transient Response of DFIG-Based Wind Plants—the Influence of Model Simplifications and Parameters,” IEEE Transactions on power systems, Vol. 23, No. 2, pp. 545-554, May 2008. [6] Singh B., Emmoji V., Singh S.N., “Performance evaluation of series and parallel connected grid side converters of DFIG,” Power and Energy Society General Meeting - Conversion and Delivery of Electrical Energy in the 21st Century, 2008 IEEE, pp. 1-8, 20-24 July 2008. [7] F. Wu, X. P. Zhang, K. Godfrey, “Small Signal Stability Analysis and Optimal Control of a Wind Turbine with Doubly Fed Induction Generator,” IET Generation, Transmission & Distribution, Volume 1, Issue 5, pp. 751-760, 2007. [8] M. G. Simoes, B. K. Bose, R. J. Spiegel, “Design and performance evaluation of a fuzzy logic based variable speed wind generation system,” IEEE Trans. Ind. Appl., vol. 33, no. 4, pp. 956-965, Aug. 1997. [9] M. G. Simoes, B. K. Bose, R .J. Spiegel, “Fuzzy logic based intelligent control of a variable speed cage machine wind generation system,” IEEE Trans. Power Electron., vol. 12, no. 1, pp. 87-95, 1997. [10] G. Venu Madhav and Y. P. Obulesu “Artificial Neural Network based control of Double Fed Induction Generator” International Journal of Emerging Trends in Electrical and Electronics (IJETEE) Vol. 1, Issue. 1, March-2013. [11] O. A. Lara, N. Jenkins, J. Ekanayake, P.Cartwright, M. Hughes, “Wind energy generation: Modeling and Control”, John Wiley and Sons, UK, 2009. ISBN: 978-1-61804-221-7 172