inclusion of small signal stability assessment to electromagnetic
advertisement

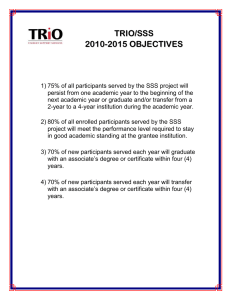
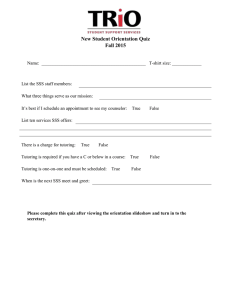
INCLUSION OF SMALL SIGNAL STABILITY ASSESSMENT TO ELECTROMAGNETIC TRANSIENT PROGRAMS J. R. Lucas, U. D. Annakkage*, C. Karawita*, D. Muthumuni#, R. P. Jayasinghe# University of Moratuwa Sri Lanka, *University of Manitoba, #Manitoba HVDC Research Centre lucas@elect.mrt.ac.lk, annakkag@ee.umanitoba.ca, chandana@ee.umanitoba.ca, dharshana@hvdc.ca, jayas@hvdc.ca ABSTRACT This paper presents the inclusion of a linearized statespace small-signal stability (SSS) module to the transient simulation program PSCAD/EMTDC. It combines smallsignal stability assessment, with the proven user interface capabilities of PSCAD. The motivation for developing the package is to provide small-signal stability assessment of case studies on PSCAD, and an adaptable simulation background for users to carry out conventional controller design without the need for an outside package. The SSS module, once fully developed, will be capable of incorporating all the system models available on PSCAD. The parameters necessary for the SSS analysis are self generated using a Software program. SSS is capable of carrying out Eigenvalue analysis. In addition it can plot step and pulse responses on the PSCAD output windows together with the EMT results. The capabilities of SSS are illustrated using the benchmark 12-bus system. Validation of the development has been checked by comparison of the Eigen variables with those of SSAT, and pulse responses with PSCAD. The system is further analysed to show how Eigenvalues obtained from SSS analysis of an unstable system may be made use of to stabilize the system before EMT simulation. KEY WORDS Small-signal-stability, state-space analysis, power system oscillations, EMT simulation, modes, participation factors 1. Introduction “Power system stability is the ability of an electric power system, for a given initial operating condition, to regain a state of operating equilibrium after being subjected to a physical disturbance, with most system variables bounded so that practically the entire system remains intact”[1]. This physical disturbance is classified into (a) large disturbances related to: high frequency transients over short periods of time (electromagnetic phenomena), low frequency transients over much longer periods (electromechanical phenomena) and (b) small disturbances, related to the small signal stability. PSCAD/EMTDC[2], EMTP, ATP are widely used computer simulation tools for the analysis of high frequency transients. Such tools do not give an insight into the parameters, such as Eigenvalues, determining the small signal stability of the system. Also they are time consuming to obtain the system response over long durations. Separate analytical tools [3-7], such as SSAT of DSAPowerTools, PSS/E and DIgSILENT PowerFactory, are generally required for studying these small signal stability issues and developing controllers for satisfactory operation of power systems to sufficiently damp out the system oscillations, without the need to do them heuristically. A principle objective of the development is to enhance the usefulness of PSCAD by introducing a small signal stability module within the package itself. The necessary analytical tools were developed within the package, to evaluate the small signal stability of a power system at a chosen operating point. Having the ability to perform small-signal stability assessment within the EMT package, facilitates this task seamlessly. If the same database is used, the possibility of inadvertently using different data in the two programs is completely eliminated and saves the time of the user. A Software program has been developed to extract the required data, from the EMTDC database and PSS/E type power flow results, for the small signal stability assessment. It is important to validate the linearized models developed, which give the necessary parameters. Validation is carried out using the benchmark 12-bus system [8]. The Eigen variables are compared with those of SSAT, and small perturbation simulations with those of the more accurate EMT type simulations (EMTDC). 2. Modelling Philosophy The power system to be simulated is set up as a EMT case with each dynamic component on a separate page module. The formulation commences with the identification of the dynamic devices (generators and auxiliary components, other dynamic devices etc.,) and other power system components (transformers, transmission lines, loads etc). For small disturbances, the stability properties of the oscillatory modes can be considered independent of the size of the system disturbance. Thus they can be analyzed by linearizing the system about the steady state operating point and using analysis methods applicable to linear systems [10]. 2.1 Modular computation of State-space Equations Each dynamic device i of the power system is described by a set of differential-and-algebraic equations (DAE), linearized about a chosen steady state operating point, of the form: • ∆ X i = [ADi] ∆Xi + [BDi] ∆Ui + [EDi] ∆Vi ∆Ii = [CDi] ∆X + [DDi] ∆Ui – [YDi] ∆Vi The DAE are then assembled in a modularized form. For example, the DAE for each generator is compiled to give the state-space matrices corresponding to the DAE. The program determines the auxiliary devices associated with the particular generator and combines their state-space equations sequentially, to give the overall state-space matrices for the generator with auxiliary devices combined, also of the above form. The state-space matrices for each generator with auxiliaries is then combined together. The algebraic equations are used steady state operating condition program. The network model is steady state operating condition model. to obtain the related using a power flow linearized around the yielding a linearized The algebraic equations for the Network are given as ∆I = [Ybus] ∆V which on combination with the state-space equations of the devices give the general state-space equations • where ∆ X = [A] ∆X + [B] ∆U [A] = [AD] + [ED][Ybus+YD]-1[CD], [B] = [BD] + [ED][Ybus+YD]-1[DD] 2.2 Small Perturbation Analysis and Simulation The Eigenvalues [Λ] and Eigenvectors [ψ] of the statespace matrix [A] are obtained using [Λ] = [φ][A][ψ] where [ψ] = [φ]–1 The state space equations are then transformed to decoupled modal form as • Z = [Λ] Z + [β] U, Y = [γ] Z where Z = [ψ] X, [β] = [ψ][B], [γ] = [C] [φ] The small-signal stability of the system can be computed from the Eigenvalues of the state matrix around the steady state operating point. It is usually necessary to determine the participation of each of the state variables in each mode to take any necessary corrective action regarding stability. The participation of the kth state variable in the ith mode are determined as pki = ψki φik Considering a small disturbance to one input, U has one element, and [Λ] is diagonal, so that the transformed state variables become independent modes, giving the set of decoupled equations • zi = [λi] zi + [βi] u which transforms, in the Laplace domain, to s Zi(s) = λi Zi(s) + [βi] U(s) This has an analytical solution of the form zi(t) = zi(0). eλit The resulting modes Z are then re-transformed to obtain the original state variables X = [φ] Z 2.3 Interfacing with Simulation Database While EMT simulation programs normally study fast transients, they require other programs to carry out smallsignal state-space analysis to get an insight into the power system. Thus for large system studies, where electromagnetic and electromechanical phenomena are investigated, in addition to the simulation tool, a small signal assessment has to be often carried out using a different package. It would thus be convenient if all the analysis could be simulated using a common tool and a single database. The SSS module requires both a dynamic file, as well as a network file, to carry out the SSS assessment. The network data file basically contains the information obtained from the Power flow in a form suitable for the SSS analysis, while the dynamic data file contains the parameters required for the DAE of the dynamic devices. These files may be hand compiled (in the customized format – in this case the EMTDC case does not have to be set up). To eliminate human error in transforming variables from the power flow solution and the EMT case, Software programs have been developed to extract the required information in the required format directly from the relevant PSS/E file, and the PSCAD case file. SSS has been developed to give a computationally efficient algorithm with an increased level of flexibility for research and development using PSCAD. SSS has been developed in a fully modular basis, allowing for the easy addition of new components by the user. 2.4 Comparison of Dynamic Simulations Provision is available for the selection of the disturbance as either a step input or a short duration pulse input and of defined magnitude. The state variables may be compared on the EMT simulation plot window from both the SSS module and the EMTDC simulation for the same case. 2.5 Graphical User Interface (GUI) A user friendly GUI has been provided to allow the user to make choices and to integrate and communicate within PSCAD through high resolution graphics. The GUI permits the selection of Eigenvalue analysis and timedomain small perturbation simulation as appropriate. The governor models and the turbine models being different from those in SSAT, a comparison of Eigenvalues was not attempted with SSAT with these added. Table 2 - Comparison of some Non-oscillatory modes Eigen values with SSS Eigen values with SSAT –42.60 –34.53 –26.91 –16.35 –13.81 –3.30 –2.10 –42.58 –34.74 –26.94 –16.31 –13.83 –3.35 –2.14 3. Case Study The PSCAD/EMTDC simulation software, and SSAT software are used for the module verification. The case study used is the benchmark 12 bus system[8] shown in figure 1. Exc 230 kV Bus 5 22 kV Bus 10 230 kV Bus 4 A further validation was made, by including the dynamics [11] of the governors (Mechanical-hydraulic controls GOV1) and the turbines (Non-elastic water column without surge tank TUR1), by comparing simulation results of SSS with PSCAD. state variables,Gen9 G10 230 kV Bus 2 Infinite Bus 22 kV Bus 12 G9 Tur Gov 345 kV Bus 7 22 kV Bus 11 Exc 345 kV Bus 8 G11 230 kV Bus 3 Gov Tur Figure 1 - 12 bus benchmark system The linearized small signal stability modelling of the network was validated against the SSAT software. In this analysis the generators[9] (generators 9 and 10 – 5th order GENSAL, generator 11 – 6th order GENROU) and their exciters (alternator supplied rectifier excitation system AC4A) are simulated [10]. The generator 12 is represented as a source without dynamics. Table 1 - Comparison of Oscillatory modes Eigen values with SSS Eigen values with SSAT – 23.26 ± j 2.24 –23.36 ± 2.25 – 7.66 ± j 2.38 – 0.58 ± j 8.17 –7.67 ± 2.25 –0.56 ± j8.12 – 0.48 ± j 6.20 – 0.27 ± j 5.06 –0.48 ± j6.19 –0.24 ± j5.05 Table 1 and Table 2 show a comparison of the Eigenvalues obtained from SSS compared with those obtained from SSAT, for oscillatory and non-oscillatory modes respectively. It is seen that there is a very close match, validating the model developed. speed (rad/s) Exc 22 kV Bus 9 230 kV Bus 6 Field voltage (pu) 230 kV Bus 1 Internal angle (rad) Tur Gov 0.125 0.100 0.075 0.050 0.025 0.000 -0.025 -0.050 -0.075 -0.100 0.8m 0.6m 0.4m 0.2m 0.0 -0.2m -0.4m -0.6m -0.8m 0.40 0.30 0.20 0.10 0.00 -0.10 -0.20 -0.30 -0.40 x11-SSS iAng1-PSCAD x21-SSS w1-PSCAD x61-SSS Efd1-PSCAD 20.0 22.0 24.0 26.0 28.0 30.0 Figure 2 - Comparison of state variables on Plot window A 2% pulse of duration 2s is applied to the field voltage, at time t=20s, allowing PSCAD to stabilize before the application of the pulse. Figure 2 compares the simulation responses (thin line) and the SSS model responses (thick line) for 3 of the system states – rotor angle, speed, and field voltage. The output shown is directly reproduced from the simulation window of PSCAD. A good match is observed for each of the 3 state variables. System data was so selected as to produce an unstable situation. Figure 3 shows a plot of the eigenvalues of the 12 bus system, as shown on the Eigen plot window. The plot window enables the user to obtain an overall view of the location of the Eigenvalues and whether there are unstable modes. Facility is available for expanding a given region. Eigenvalue plot 10.0 +y Table 4 shows the participation factors of some of the selected modes, grouped as per rotor, machine, exciter, governor and turbine, and listed for generators 9 and 10. The participation factors can be used to determine which of the parameters are responsible for the unstable modes. Table 4 – Participation (%) of selected modes Mode Rot9 Mac9 Exc9 Gov9 Tur9 Rot10 Mac10 Exc10 Gov10 Tur10 4 5.0 50.5 9.9 5.2 10 22.3 37.7 10.8 22.6 49.5 50.0 49.7 4.4 1.4 1.2 25.7 21,39 46.5 4.5 29 30 13.3 0.9 51.4 3.3 27 +x 9.4 7.5 12,16 23 -x 22.8 27.6 49.1 1.6 5.1 0.1 0.0 1.2 29.6 2.9 15.6 0.7 0.6 50.3 2.4 43.8 41.0 45.7 2.2 1.8 30.5 3.0 96.5 1.7 1.2 96.2 Table 4 shows the participation of 2 generators 9 (which has been excited) and 10 (one which has not been excited) in the oscillatory modes. It is seen that the unstable modes 25,40 have their main contributions from the rotor dynamics (state variables – rotor angle and speed) of generators 9 and 10. It was also observed that generator 11 (for which the participation factors are not displayed) had little contribution to these modes. -2.5 -5.0 -7.5 -y -50 -40 -30 -20 -10 0 Figure 3 - Eigenvalue plot window Table 3 - Eigenvalues of oscillatory modes Mode No. 6, 7 8, 9 11,15 12,16 13,17 18,38 21,39 25,40 Eigenvalue –26.680 ± 0.172 –24.257 ± 2.198 –10.069 ± 10.306 –10.066 ± 10.302 –10.045 ± 10.303 – 0.643 ± 8.137 – 0.517 ± 6.140 0.161 ± 2.805 Frequency (Hz) 0.027 0.350 1.640 1.640 1.640 1.295 0.977 0.447 state variables,Gen9 10 Damping (%) 1.000 0.996 0.699 0.699 0.698 0.079 0.084 – 0.057 Internal angle (rad) -10.0 The Eigenvalues of the Real modes are all stable modes and are not listed in this paper. x11-SSS iAng1-PSCAD x21-SSS w1-PSCAD x61-SSS Efd1-PSCAD 0.10m 0.05m 0.00 -0.05m -0.10m -0.15m Field voltage (pu) Table 3 shows the Eigenvalues of the oscillatory modes in tabular form with their frequencies of oscillation and their damping. It is seen that the Eigenvalue pair (modes 25 and 40) has a positive real part giving an unstable mode. This is the cause of the instability demonstrated in the simulation of figure 2. 0.020 0.010 0.000 -0.010 -0.020 -0.030 -0.040 -0.050 -0.060 0.15m speed (rad/s) 0.0 46.6 11,15 25,40 39.0 2.5 0.8 30.9 28.5 18,38 19 7.5 1.1 6, 7 8, 9 0.100 0.080 0.060 0.040 0.020 0.000 -0.020 -0.040 -0.060 20.0 22.0 24.0 26.0 28.0 Figure 4 - Comparison after stabilization 30.0 Based on the above, the exciter gains of generators 9 and 10 were changed so as to yield all negative eigenvalues, as shown in table 5. The new simulation results, of comparison of SSS with PSCAD (figure 4) shows that the simulation again agrees closely, but that the system is now stable. Table 5 - Eigenvalues of oscillatory modes (new) Mode No. 8, 9 11,15 12,16 13,17 18,38 21,39 25,40 Eigenvalue –22.752 ± 1.929 –10.069 ± 10.306 –10.066 ± 10.302 –10.045 ± 10.303 – 0.578 ± 8.098 – 0.490 ± 6.157 – 0.095 ± 2.590 Frequency (Hz) 0.307 1.640 1.640 1.640 1.289 0.980 0.412 Damping (%) 0.996 0.699 0.699 0.698 0.071 0.079 0.037 5. Conclusions A small-signal stability (SSS) module has been formulated for use with the transient simulation tool PSCAD. The developed SSS module is the outcome of the ongoing research conducted at the University of Manitoba on linearization of dynamic devices and its implementation into small-signal stability analysis. SSS integrates the abilities of the EMT package and its GUI, with the SSS analysis module. The common database, from which data for SSS is extracted, aids the user by having a single tool for design studies. Simulation results for the benchmark 12 bus system show that it is a powerful and promising tool for carrying out small-signal analysis together with transient analysis, especially for power system controller design to prevent instabilities. Validation has been carried out by comparison of Eigenvalues with SSAT and time domain responses with PSCAD/EMTDC. SSS could be effectively used to study the stability of a proposed power system before detailed simulation on an EMT type simulation is carried out. SSS could also enhance power engineering courses by use in the classroom for instructional purposes for the students to get an insight into controller design. The SSS module has been developed on a modular basis, and will in the future permit incorporation of user defined devices by inputting their state matrices. Acknowledgements The financial assistance of Manitoba HVDC Research Centre for the project through the University of Manitoba is gratefully acknowledged. References [1] P. Kundur, J. Paserba, V. Ajjarapu, G. Andersson , A. Bose , C. Canizares, N. Hatziargyriou, D. Hill, A. Stankovic, C. Taylor, T. Van Cutsem, and V. Vittal IEEE/CIGRE Joint Task Force on Stability Terms and Definitions, Definition and classification of power system stability, IEEE Transactions on Power Systems, 19(2), May 2004, 1387-1401. [2] PSCAD/EMTDC User’s Guide, (Manitoba HVDC Research Centre, Manitoba, 2002) [3] L. Wang, F. Howell, P. Kundur, C.Y. Chung, and W. Xu, A Tool for Small-Signal Security Assessment of Power Systems, PICA, Sydney, May 21-24, 2001 [4] P. Kundur, G.J. Rogers, D.Y. Wong, L. Wang, M.G. Lauby, A comprehensive computer program package for small signal stability analysis of power systems, IEEE Transactions on Power Systems, 5(4), November 1990, 1076-1083. [5] M. Parniani1 and M.R. Iravani, Computer analysis of small-signal stability of power systems including network dynamics, IEE Proceedings - Generation, Transmission and Distribution, 142(6), November 1995, 613-617. [6] A. P. Sakis Meliopoulos, G. J. Cokkinides, Small signal stability analysis of the integrated power system – microgrid, Model Bulk Power System Dynamics and Control - VI, August 22-27, 2004, Cortina d’Ampezzo, Italy, 595-601. [7] N. Martins, S. Gomes Jr., P. E. M. Quintão, J. C. R. Ferraz, S. L. Varricchio, A. de Castro, Some recent developments in small-signal stability and control , Proc. of Power Engineering Society Winter Meeting 2002, New York, 2002, 1171-1177. [8] S. Jiang, U.D. Annakkage and A.M. Gole, A Platform for Validation of FACTS Models, IEEE Trans. Power Delivery, 21(1), 2005, 484-491. [9] P. Kundur, Power systems stability and control, (McGraw-Hill, New York, 1994). [10] IEEE Recommended Practice for Excitation System Models for Power System Stability Studies, IEEE Std 421.5-2005. [11] WG on Prime Mover and Energy Supply Models for System Dynamic Performance Studies, Hydraulic Turbine And Turbine Control Models For System Dynamic Studies, IEEE Transactions on Power Systems, 7(1), February 1992, 167-179.