An Electricity Primer for Energy Economists: Basic - Econ

An Electricity Primer for Energy Economists:
Basic EE to LMP Calculation
Richard M. Benjamin
Round Table Group
January 23, 2013
Chapter 1
Basic EE and PTDFs
1.1
Introduction
This manuscript provides a technical primer for the energy economist wishing to study the optimal power flow problem and locational marginal pricing (LMPP), but, who like this paper’s author, finds it difficult to simply plow through Schweppe et al. (1988). This work aims to provide the reader with sufficient technical background to calculate power transfer distribution factors (PTDFs, or network shift factors) for a more complicated model than
the simple 3-node model common to energy economics studies.
The point of departure for this work is basic electrical engineering fundamentals. We start off Section 1.2 with a simple direct current (DC) circuit analysis, demonstrating Ohms law and Kirchhoffs laws.
As these are captured by very basic equations, we quickly move on to alternating current
(AC) analysis. Here, we spend quite a bit of effort manipulating fairly straightforward
(i.e. sinusoidal) AC voltage equations to derive equations for average voltage, current, and power in an AC circuit. We delve next into phase angles, showing how electrical components such as inductors and capacitors bring voltage and current “out of phase.” We then demonstrate both graphically and algebraically the effect of non-zero phase angles on resistance and power relations in an AC circuit. The goal of Section 1.2 is to familiarize the reader with concepts that economists and operations researchers generally take for granted, but are quite foreign to those of us who are self-taught.
Getting this background under our belts, we move on to DC network analysis, taking this intermediate step to demonstrate circuit concepts to the reader in the simple setting of a DC network. We then introduce the reader to the linearized version of the AC network model in Section 1.3. In this section we demonstrate a methodology for linearizing the real-power
1
See e.g.
Bushnell and Stoft (1997) for a detailed analysis of the three-node model.
1
AC network equations (the latter of which we derive in Appendix A). After linearizing the AC network equations, we quickly demonstrate DC sensitivity analysis in section 1.4.
We conclude Chapter 1 by demonstrating the calculation of the PTDFs for the linearized
(DC) version of the AC network in section 1.5. Sections 1.2, 1.3, and 1.5 of this chapter aim to provide the reader with sufficient technical background to understand basic power equations, as presented in energy economics papers, along with deriving PTDFs. Section
1.4 offers a conceptual preview of locational marginal price calculation, as demonstrated in chapter 3.
In Chapter 2, we present the AC power flow model and a powerful method for solving the
AC power flow problem, the Newton-Rhapson Method. Chapter 2 serves two purposes.
First, it familiarizes the energy economist with the type of problems setup that one sees in electricity papers written by operations research analysts.
The economist spending any time at all in the study of electricity will almost certainly run into such, and this chapter provides some nice background material. Second, the method we use to solve the DC optimal power flow algorithm corresponds to a single run of the Newton-Rhapson algorithm for solving nonlinear equations. Thus, this serves as valuable material for the economist wishing to place our solution method in its proper context.
In Chapter 3 we demonstrate LMP calculations. Fortunately, chapters 1 and 2 do most of the ”heavy lifting” of AC optimal power flow setup, allowing the reader to focus on the specifics of LMP derivation, while simply reviewing OPF principles.
1.2
Electrical Engineering Fundamentals
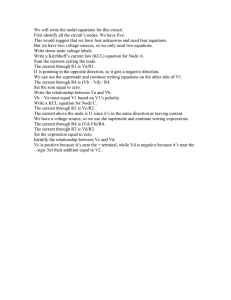
We begin our power flow analysis with a DC series circuit.
In a basic series circuit, a source of electromagnetic force (emf) is connected to one or more sources of resistance
(e.g. light bulbs), which form a circuit, as shown below:
− +
Battery
R b
R a
Figure 1.1: A Basic DC Circuit
2
Other DC circuits include paralled circuits, where current flow splits at junctures into parallel paths.
2
In a DC circuit current flows in one direction only: from negative to positive (as opposed to AC, where current alternates direction several times per second). Thus, current flows in a counterclockwise direction in the example above. The mathematics of this circuit are governed by three laws: Ohm’s Law, Kirchhoff’s Current Law (KCL), and Kirchhoff’s
Voltage Law (KVL). These three laws are as follows: Ohm’s law: current, resistance and voltage in a circuit are related as follows:
V = I × R.
(1.1) where:
• V is voltage, or emf, measured in volts,
• I is current, measured in amperes, and
• R is resistance, measured in ohms.
Applied to our analysis, Ohm’s law reveals that the voltage “drop” across resistors a and b is equal to the resistor’s resistance value times the current flowing through the resistor.
Kirchhoff’s voltage law (KVL): The directed sum of the electrical potential differences (voltage) around any closed circuit is zero.
Kirchhoff’s current law (KCL): At any node in an electrical circuit, the sum of currents flowing into that node is equal to the sum of currents flowing out of that node.
Kirchhoff’s laws are both conservation laws.
KVL states that the sum of the voltage dropped across the two resistors is equal to the voltage produced by the current source
(battery). KCL is likewise the law of conservation of current. For a circuit with only one path, KCL implies that current is constant throughout the circuit. Given these three laws and sufficient values for the circuit, we may solve for the remaining unknown values.
Assume that we have a 9-volt battery, the value of the first resistor, R a
, is 3 ohms(Ω), and an ammeter yields a measurement of 2 amps. We are tasked with finding the remaining values. The easiest, most organized, answer is to fill in these numbers on a table, as shown below:
Table1.1: V , I , and R Calculations
R a
R b
V 6 3
Total
9
I 2 2 2
R 3 1.5
4.5
(numbers in bold are given)
3
By KCL, current at all points in the circuit is equal to 2 amps.
Since we are given
R a
= 3Ω , Ohm’s law allows us to solve for the voltage drop across this resistor as 6 volts.
That is, running 2 amps through a 3 ohm resistor produces 6 volts of force. Next, KVL tells us that the 9 volts produced by the battery dissipate across the two resistors. Since the first resistor dissipates 6 volts of force, the second one must dissipate 3 volts, or V b
= 3.
Further application of Ohm’s law reveals that the second resistor is a 3 / 2 = 1 .
5Ω resistor.
Ohm’s law also applies to the circuit as a whole. So, if a 9-volt battery produces 2 amps of current, total resistance in the circuit is 9 / 2 = 4 .
5Ω. This reveals another law of series
circuits. Resistance, as well as voltage, is additive.
While batteries are a DC voltage source, most electrical devices run on AC. An AC generator, or alternator, produces alternating current as a magnetic field rotates around a set of stationary wire coils. When the magnet starts its rotation, at the reference angle of zero degrees, it is completely out of alignment with the coil. It moves closer into alignment until it reaches an angle of 90
◦
, and moves further out of alignment again. Because the electromagnetic force, or voltage, created in this operation varies directly with the degree of alignment between the magnet and the coil, we may (for the present) express instantaneous voltage mathematically as:
(1.2) ν ( t ) = V max sin( ωt ) , where:
• V max is maximum instantaneous voltage, or voltage amplitude,
• ω
is angular frequency, in radians per second, 5
and
• t is time, in seconds.
Multiplying ω (radians per second) times t , (seconds), gives us the angle covered by the magnet in t
seconds. Thus, we may write (1.2) as either
ν ( t ) = V max sin( ωt ), or
ν ( t ) = V max sin( θ ) , (1.3) where θ is the familiar symbol for measuring angles (e.g.: An alternator with an amplitude of 100 volts, produced by a magnet turning one radian per second, has an instantaneous voltage of ν (1) = 100 sin(1) = 84 .
15 volts at t = 1 second). Note that voltage is
3
When we look at multiple lines across which current flows (known as parallel circuits), this relation will no longer hold because current will split along parallel paths. KCL then implies that the sum of the currents along parallel paths is equal to current running through a single path (so that current is preserved).
4
This rule does not hold for parallel circuits (although it does hold for parallel components in series).
See, e.g. Dale (1995).
5
For those of us who have long since forgotten, there are 2 π radians in a circle, so a radian equals approximately 57.3. Thus we may also write ν ( t ) = V max sin(2 πf t ) , where f is frequency, in rotations per second.
4
important in the study of optimal power flow because it is a determining factor of the power a generator produces, that is,
P = I × V.
(1.4) where:
P
From Ohm’s law, we can substitute for either V or I , giving us two alternative expressions for power:
P = I
2
R and P =
V
2
.
R
As resistance is a many-headed beast, for now we will focus on the derivation of power given
by (1.4). The most basic resistance source (the resistor) has a fixed resistance. Ohm’s law
tells us that in a purely resistive circuit, voltage and current will vary only by a constant of proportionality (the fixed resistance). Therefore, since the formula for voltage is given
by (1.2), the formula for current is given by:
i ( t ) = I max sin( ωt ) , (1.5) where:
I max is maximum current, or current amplitude.
Using (1.4), we combine (1.2) and (1.5) to yield the formula for instantaneous AC power:
p ( t ) = V max sin( ωt ) · I max sin( ωt ) .
(1.6)
Using trigonometric identities, we may write sin
2
( x ) as
1
2
(1 − cos 2 x ). Thus we rewrite p ( t ) =
1
2
V max
I max
−
1
2
V max
I max
(cos 2 ωt ) .
(1.7)
Of course, when examining a generator’s power output, we are not concerned with its instantaneous value, which varies continuously, but rather its average value.
Looking
at (1.7), we see that instantaneous power has both a fixed (
( − 1
2
V max
I max
1
2
V max
I max
) and a variable cos(2 ωt )) component. Since, like that of sin x , the average value of cos x is zero over one full cycle, the average value of power reduces to the first component:
P avg
= −
1
2
V max
I max
.
6
We get the much more familiar expression, P = I × E , by denoting voltage as E rather than V
(1.8)
5
Alternately, we may calculate the average value of power directly from the formulas for average values of voltage and current, which we do below. By inspection, we will not get
very far using either (1.2) or (1.5) directly, because we run into the same phenomenon of
zero average value for a sinusoidal signal. This is unimportant, however, as the sign of the
voltage or current in question is altogether arbitrary.
Intuitively, one will feel the same shock whether a voltmeter registers − 50 V or +50 V (don’t try this at home). We get around the sign problem for voltage and current by squaring the instantaneous values of each and
integrating to arrive at their respective averages. Starting with (1.3),
ν ( t ) = V max sin( θ ), we are reminded that the magnet travels 2 π radians per complete rotation. Therefore, the average value for voltage-squared over one complete cycle is:
V
2 max
2 π
Z
2 π sin
2
θ d θ =
0
V
2 max
2 π
Z
2 π
0
1 − cos (2 θ )
2 d θ.
Since the integral of cos(2 plete cycle is V
2 max
/ 2.
x ) is
1
2 sin(2 x ), the average value of voltage-squared over a com-
Taking the square root of this value, we find that the average value for voltage is:
V avg
= | V | =
V
√
2
Going through the same steps, we find that the average value for current is:
(1.9)
I avg
= | I | =
I
√
2
.
Multiplying (1.9) and (1.10), we again find that
P avg
(1.10)
If electrical systems contained only voltage sources, wires, and resistance sources (e.g., resistors and load), the world would be a happy place for the energy economist, with current and voltage always and everywhere in phase. Unfortunately (for us) though, electrical devices contain capacitors and inductors, casting us out of the Eden of synchronous voltage
Let us begin by demonstrating how inductors bring voltage and current out of phase, thus creating a non-zero phase angle. Inductors (typically an inductor is a conducting wire shaped as a coil) oppose changes in current, as expressed by the formula:
V = L d I d t
= L I max cos( ωt ) , (1.11)
7
In a DC circuit, for example, a voltmeter may register a positive or negative value, depending on the reference point.
8
See, e.g. Mittle and Mittal (2006), Section 6.4.1 6.4.2.
10 Inductors and capacitors, of course, do serve useful purposes, such as storing electrical energy and filtering out specific signal frequencies, but that is beside the point.
6
where:
L is inductance, measured in Henrys.
(1.11) states that the voltage drop across an inductor is equal to the inductors inductance
times the rate of change of current over time. To see how this creates a phase shift between
current and voltage, we must refer to the latter two’s sinusoidal nature.
V, I
Instantaneous voltage
Instantaneous current time
Figure 1.2: Instantaneous AC Current and Voltage Perfectly in Phase
Since d I
at a maximum or a minimum, from (1.11) instantaneous voltage,
ν ( t ), is equal to d t zero when I = ( I max
, − I max
). Thus, voltage and current are 90
◦ out of phase for an purely inductive current, as shown below:
V, I
Instantaneous voltage
Instantaneous current time
Figure 1.3: Instantaneous AC Current and Voltage in a Purely Inductive Circuit
Note that in this case we have set R = 1Ω, simply for aesthetics. Note further that we may demonstrate the phase shift for an inductor by recognizing that instantaneous voltage is
11
Note that V > I
in Figure(1.2). Therefore, from (1.1), it must be the case that
R > 1.
7
at its maximum or minimum synchronously with d I d t
.
of inflection, which occur at i ( t ) = 0.
d I d t reaches its extrema at its points
While we may still write i ( t ) = I max sin θ , it is no longer the case that v ( t ) = V max sin θ .
Taking advantage of the fact that cos θ = sin θ + 90
◦
, we write: i ( t ) = I max sin θ, v ( t ) = V max sin( θ + 90
◦
) .
In this instance we say that voltage leads current by 90
◦
, or equivalently, current lags voltage by 90
◦
. More generally, we write: v ( t ) = V max sin( θ + δ ) , where δ ∈ (0
◦
, 90
◦
] is commonly known as the phase angle between voltage and current.
Like inductors, capacitors also introduce phase angles between current and voltage. A capacitor contains two conductors separated by an insulator.
Current flow through a capacitor is directly related to the derivative of voltage with respect to time, as follows: where: i ( t ) = C d V
, d t
C is capacitance, measured in Farads.
(1.12)
Capacitance will depend on the materials composing the insulator. From (1.12), we see
that instantaneous current will be zero when voltage is at its maximum or minimum values, and will reach its maximum and minimum values at the inflection points for voltage.
Graphically, the relationship between voltage and current in a capacitor is as shown below:
V, I
Instantaneous voltage
Instantaneous current time
Figure 1.4: Instantaneous AC Current and Voltage in a Purely Capacitive Circuit
8
In a capacitor, current lags voltage by 90
◦
, and thus we may write:
ν ( t ) = V max sin( θ − 90
◦
) .
Note the difference between a resistor versus an inductor or capacitor. A resistor simply opposes the flow of current, like sand opposes the flow of water. An inductor or capacitor, however, does not oppose a constant flow of current. Inductors oppose changes in current flow , while capacitors oppose changes in voltage , both at angles of | 90 | ◦
. The name for the opposition exerted created by inductors and capacitors is reactance, denoted by the symbol X and measured in ohms. For an inductor, we denote reactance by a vector | 90 |
◦ out of phase with current, creating a | 90 | ◦ phase angle between voltage and current, as shown in Figure 1.5.
Rectance
V
90
◦
I
Figure 1.5: Geometric Representation of Reactance
In general, electrical circuits will not simply contain inductors or capacitors or resistors, but some combination of the three. Therefore, real-world electricity systems will usually be characterized by phase angles of other than 0
◦ or 90
◦
. To determine the angles for such systems, we add the vectors for reactance and resistance, arriving at a quantity called impedance, denoted by Z and measured in ohms. We demonstrate a circuit with a 4 ohm resistor and a 3 ohm inductor, in Figure 1.6, below:
9
Z = 5Ω
X = 3Ω
θ
R = 4Ω
Figure 1.6: Geometric Representation of Impedance
Impedance is the vector sum of resistance and reactance. A circuit with a 4Ω resistor and a 3Ω inductor will thus have total impedance equal to 5Ω.
While we have correctly calculated impedance as 5Ω, it is more common to denote impedance not only by its magnitude, but also its direction as well. We can do this by referring to either polar or rectangular notation. Polar notation uses the vector compass to express the variable of interests quantity in terms of magnitude and direction (that is, phase angle).
To compute the phase angle for impedance, we simply calculate the angle corresponding to this quantity. We express impedance in this case as:
Z = p
4 2 + 3 2 Ω at phase angle δ, or Z = 5Ω at [cos
− 1
(0 .
8)]
◦
= 5Ω at 36 .
87
◦
.
Thus, we would express this example’s impedance in polar notation as:
Z = 5Ω ∠ 36 .
87
◦
(1.13)
(alternatively, the combined effect of the resistor and inductor is to produce an impedance of 5Ω at 36 .
87
◦
).
Notice that no information is lost in switching to polar notation. We may go the other way to calculate the resistive and reactive components of impedance as follows:
Resistance = 5 cos(36 .
87
◦
) = 4Ω ,
Reactance = 5 sin(36 .
87
◦
) = 3Ω .
This yields a second way to express impedance: in terms of resistance plus reactance. We do this using rectangular notation. To switch from polar to rectangular notation graphically, we switch from using the vector compass to representing the horizontal axis as real units, and the vertical axis as imaginary units. In doing so, we place resistance (to real power) on the horizontal axis and reactance on the vertical, as shown below:
10
Imaginary
Axis
Z = 5Ω
X = 3 j Ω
R = 4Ω Real Axis
Figure 1.7: Impedance in Rectangular Form
Thus, we write Z = 4 + 3 j
Having introduced impedance, we may compute power in a mixed resistive/reactive circuit.
Let us then draw a circuit with a 4-ohm resistor ( R ) and a 3-ohm inductor ( L ) (alternatively, reactor):
R = 4Ω ∠ 0
◦
Resistor
L = 3Ω ∠ 90
Inductor
◦
∼
Figure 1.8: AC Circuit with Resistance and Reactance
The symbol,
∼
, represents an AC voltage source. As is standard, we will assign a phase angle of 0
◦ to the voltage source, with the phase angle and magnitude of impedance given
by (1.13). Given total voltage and impedance, we apply Ohm’s law as applied to AC
12 In electrical engineering,
√
− 1 is commonly denoted as j , instead of i . The change in axes accounts for the (initially) confusing switch in the formulas for voltage and current from v ( t ) = V max sin θ to v ( t ) =
V max cos θ . The real quantity is now the adjacent, not the opposite.
11
circuits ( V = IZ
I =
V
I
=
20V ∠ 0
◦
5Ω ∠ 36 .
87 ◦
= 4 A ∠ − 36 .
87
◦
From here, calculating the remaining voltages is straightforward (answers in Table 1.2, below).
Z
Table 1.2: V , I , and Z Calculations
R
V 16 ∠ − 36 .
87
◦
I 4 ∠ − 36 .
87
◦
4 ∠ 0
◦
L
12 ∠ + 53 .
13
◦
4 ∠ − 36 .
87
◦
3 ∠ 90
◦
Total
20 ∠ 0
◦
4 ∠ − 36 .
87
◦
5 ∠ − 36 .
87
◦
Finally, let us move on to AC power calculation. Real power is the rate at which energy is expended. According to Grainer and Stevenson (1994), reactive, or imaginary power,
“expresses the flow of energy alternately toward the load and away from the load.” 14
Intuitively, we can divide a power generator’s (or simply, “generator’s”) output into power capable of doing work (real power), and power not capable of doing work (reactive power).
Reactive power is the result of current moving out of phase with voltage. The greater the phase angle between voltage and current, the less efficient is power output in terms of capability to do work, and the greater is reactive power. Apparent, or complex, power is the (geometric) sum of real and reactive power. Thus, we derive the “power triangle” in the same manner as we derived the relationship between resistance, reactance, and impedance:
13
Again, since there is only one pathway for current, the amount amperage is constant across the entire circuit. The angle, − 36 .
87
◦
, is the amount by which current lags voltage.
14 p. 8. The exact nature of reactive power is not well understood.
12
Imaginary
Axis
Complex Power S = P + jQ
Reactive Power Q = 0 + jQ
Real Power P = P + j 0 Real Axis
Figure 1.9: Complex Power (the “Power Triangle”)
Calculating complex power in rectangular notation is straightforward: Simply take real power plus reactive power equals complex power, or S = P + jQ .
Calculating complex power in polar form is a bit more complicated. Taking the phasors for voltage and current as V = | V | ∠ α and I = | I | ∠ β the formula for complex power is:
V I
∗
= | V I | ∠ α − β, where
∗ denotes the complex conjugate (as we will demonstrate shortly). Note that the angle, α − β , is once again the phase angle between voltage and current, as may be verified by designating voltage as the reference phasor.
To see why we take the complex conjugate of current (i.e., we switch the sign on the angle for current), let us turn to Appendix A eqs.(1A.5) and (1A.6) for reactive and complex power:
Q = | I |
2
× X,
S = | I |
2
× Z.
Dividing (1A.5) by (1A.6):
Q
S
=
Q
.
Z
That is, the cosine of the phase angle for impedance is equal to that of the power triangle, and thus the phase angles themselves are equal. Since the phase angle for impedance is
α − β , the phase angle for the power triangle is this quantity as well. But we have to switch the sign on the current phasor to maintain this result.
13
Euler’s identity: e jθ
= cos θ + j sin θ offers further insight into both rectangular and polar representation of electrical quantities such as impedance and power. Resistance is equal to | Z | cos θ , and reactance is equal to | Z | sin θ . If we denote the horizontal axis as the real number line, and the vertical axis as the imaginary number line, we may express impedance as:
Z = | Z | cos θ + j | Z | sin θ = | Z | e jθ
, and complex power as:
S = | I | 2 | Z | e jθ
.
1.3
DC Network Calculations
1.3.1
Nodal Voltages and Current Flows
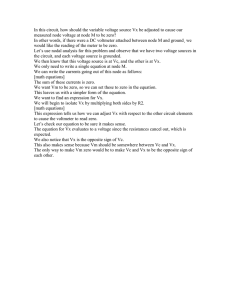
Having demonstrated the basics of voltage, current, resistance, and power, we may demonstrate the calculation of these values in circuit analysis. We start with a DC circuit, then move on to its AC counterpart. First let us specify the network itself. We will examine an
elementary circuit, called a ladder network, as shown below:
R b
R d
R f
I
1
R a
R c
R e
R g
I
4
0
Figure 1.10: A Five-node Ladder Network
A network is composed of transmission lines, or branches. The junctions formed when two or more transmission lines (more generally, circuit elements) are connected with each other
15
Taken from Baldick (2006, p. 163 et. seq.
)
14
are called nodes (e.g., in the figure above, line 12 connects node 1 with node 2). In the above example, then, there are seven transmission lines [12, 23, 34, 01, 02, 03, and 04] connecting five nodes [0, 1, 2, 3, 4].
Denote:
N = Number of nodes in a transmission system, k = Number of lines in a transmission system,
R ij
= Resistance of transmission line connecting nodes i and j; or
R
`
= Resistance of transmission line ` ,
Y
`
= Admittance of transmission line ` ,
I j
= Current source, located at node j,
I ij
V j
= Current flowing over line ij,
= Voltage at node j,
V ij
= Voltage differential between nodes i and j
(also known as the “voltage drop”” across line ij ).
Note that all of the above network’s N = 5 nodes are interconnected, directly or indirectly, by transmission lines and are subject to Kirchhoff’s laws. Since the (directional) voltage drops across the system must sum to zero, satisfaction of KVL takes away one degree of freedom in the system. Thus we need write voltage equations for only N − 1 nodes to fully identify an N -node network. KVL also allows us to choose one node as the datum (or ground) node, and set voltage at this node equal to zero. The researcher is free to choose any node as datum. To minimize computational cost, one generally chooses as datum the node with the most transmission lines connected to it. It is customary to denote the datum node as node 0.
There are two current sources in this circuit, I
1 and I
4
. The current sources are generators located at nodes 1 and 4. These generators are connected to the transmission grid by lines 01 and 04, or, alternatively, lines a and g . These lines are generally denoted “limited
In the electrical engineering literature, such lines are known
The ladder network above might represent, say, a transmission
16 Generally, limited interconnection facilities’ sole purpose is to interconnect power plants to the grid.
Such facilities are not required to provide open access to customers wishing to transmit power over the former. However, the distinction between a limited interconnection facility and a transmission line which must provide open access (that is, a facility which must submit an Open Access Transmission Tariff to the FERC) can become blurry when the “limited interconnection facility” is, say, a 40+ mile long line.
This was the case with the Sagebrush line (see, e.g. the case filings before the Federal Energy Regulatory
Commission in docket numbers ER09-666-000 and its progeny (e.g. ER09-666-001). Two relevant orders in these cases are found in 127 FERC ¶ 61,243 (2009) and 130 FERC ¶ 61,093 (2010).
17
See, e.g.
, Glover et al. (2012), section 4.11, and Grainger and Stevenson (1994), chapter 6.
15
line stretching across New York State, where node 1 represents Buffalo, node 2 represents
Rochester, node 3 represents Syracuse, and node 4 represents Albany. Node 0 then, actually represents four physically distinct locations, where generators at or around these four cities are connected to the transmission grid by limited transmission interconnection facilities.
Again, in standard electrical engineering parlance, node 0 is the ground “node.”
Note that one may label the resistance associated with a particular transmission line by naming the nodes the line connects, or simply assigning the line its own, alternative, subscript. Resistance in transmission lines is the opposition to current as current bumps into the material composing the transmission lines. Good conductors, or materials that offer relatively little resistance, are ideal candidates for transmission lines. Metals with free electrons, like copper and aluminum, make good conductors as they provide little resistance.
Before we analyze the equations corresponding to Kirchhoffs Laws, let us introduce the concept of admittance. Admittance measures the ease with which electrons flow through a
circuit’s elements, and is the inverse of impedance.
Since there are no reactive components in our example, though, impedance and resistance are equivalent. We thus loosen our terminology and let admittance denote the inverse of resistance. Labeling admittance by
1
Y , we thus have Y = .
Ohm’s Law is then:
R
I =
1
R
V = Y × V.
Ohm’s Law allows us to write current flow along a particular line as a product of the voltage drop between the two nodes that the line connects and the admittance of the line.
It thus yields the flow of current across the k = 7 transmission lines in our example. To start, we write current flow along line 10, I
10
, as:
I
10
= V
10
Y
10
= ( V
1
− V
0
) Y
10
= V
1
Y
10
(1.14)
(since V
0
= 0). We write current flow across the other six lines analogously:
I
12
= ( V
1
− V
2
) Y
12
,
I
20
I
23
= V
2
Y
20
,
= ( V
2
− V
3
) Y
23
,
I
30
= V
3
Y
30
,
I
34
= ( V
3
− V
4
) Y
34
,
I
40
= V
4
Y
40
.
18 The inverse of resistance is actually conductance.
(1.15)
(1.16)
(1.17)
(1.18)
(1.19)
(1.20)
16
KCL expresses the conservation of current at the ( N − 1) = 4 nodes. That is, KCL states that the sum of the currents entering a node equals the sum of currents exiting that node.
We will use the convention that only current sources (generators) produce current entering a node, while all transmission lines carry current away from that node. Let us begin with node 1. Current I
1 enters node 1, while transmission lines 10 and 12 carry current “away” from this node. Thus KCL implies that I
1
= I
10
+ I
12
. Note that I ij denotes flow of current from node i to node j . If the actual current flow is in the opposite direction i.e.
, from node j to node i , we write I ij
< 0. Otherwise, I ij
≥ 0. The important point is that we specify the assumed direction of current flow by the ordering of the subscripts.
Because we do not incorporate load in this example,
we will have I
1
≥ 0.
I
1
= 0 iff the current source is not currently operational, as when a generator is shut down for maintenance.
I
10 and I
12 may be either positive or negative, depending on the direction
of current flow. Substituting (1.14) and (1.15) for
I
10 and I
12
, respectively, yields:
I
1
= V
1
· Y
10
+ ( V
1
− V
2
) Y
12
.
Grouping the voltage terms yields:
I
1
= ( Y
10
+ Y
12
) V
1
− Y
12
V
2
.
(1.21)
There is no current source at node 2, simply three transmission lines which, by convention, carry current away from this node. Our three current equations for lines 21, 20, and 23 are then, respectively:
Y
21
( V
2
− V
1
) = I
21
,
Y
20
( V
2
) = I
20
,
Y
23
( V
2
− V
3
) = I
23
.
Let us remark at this point that Y
Applying KCL to node 2 yields I
21 ij
+
= Y ji
, i.e.
, admittance is not a directional value.
I
20
+ I
23
or:
− Y
21
V
1
+ ( Y
21
+ Y
20
+ Y
23
) V
2
− Y
23
V
3
= 0 .
(1.22)
The alert reader will notice that node 3 is similar to node 2, in that there is no current source and three branches emanating there. Thus KCL generates:
− Y
32
V
2
+ ( Y
32
+ Y
30
+ Y
34
) V
3
− Y
43
V
4
= 0 .
(1.23)
19 If there were a load located at node 1, then current flow from node 1 would be negative (i.e., net current would flow to node 1, rather than away from it) whenever node 1 load is greater than node 1 generation.
20
This is a likely explanation for the single-subscript notation for resistance and admittance common in
EE texts.
21
Note that this equation does not imply that no current flows through node 2. It states that current traveling toward node two, which takes on a negative sign, equals the amount of current flowing out of node
2 (which has a positive sign), and thus the principle of conservation of current.
17
Finally, our treatment of node 4 is symmetric to node 1, producing:
− Y
43
V
3
+ ( Y
43
+ Y
40
) V
4
= I
1
.
(1.24)
Note that (1.21) — (1.24) form a system of four equations in four unknowns, which we
express in matrix form below (after switching to single subscript notation for line admittances, for expositional ease):
Y a
+ Y b
− Y b
0
0
− Y b
Y b
+ Y c
+ Y d
− Y d
0
0
Y d
− Y d
+ Y e
+ Y f
− Y f
0 V
1
0
Y f
− Y f
+ Y g
V
2
V
3
V
4
=
I
1
0
0
.
I
4
(1.25)
The LHS matrix is known as the admittance matrix. The (square) admittance matrix is usually denoted as A ∈
R n × n
, with generic element A ij
.
V ∈
R n and I ∈
R n are the vectors of unknown voltages and known current injections at each of the networks nodes, respectively.
Given values for admittances and current injections, we may solve for nodal voltages and current flows over each line. As the simplest example, consider resistances of one unit for each resistor in the circuit and current injections of one unit at both nodes 1 and 4. In this case,
Y i
=
1
R i
= 1 ∀ i = a, b, . . . , g.
The system to be solved is given in matrix form below:
2 − 1 0 0 V
1
− 1 3 − 1 0
0 − 1 3 − 1
V
2
V
3
0 0 − 1 2 V
4
1
=
0
0
,
1
(1.26) yielding V
∗
0
=
"
2
3
1
3
1
3
2
#
.
3
18
We may now solve for current flows across all lines in the network, using (1.14) – (1.20).
I
12
I
23
=
I
I
10
Y b
20
=
( V
1
=
Y a
− V
Y c
V
2
V
1
) =
2
=
=
2
3
,
1
3
,
1
3
,
= Y d
( V
2
− V
3
) = 0 ,
I
I
30
40
=
=
Y
Y e g
V
V
3
4
=
=
1
3
,
I
34
= Y f
( V
3
− V
4
) = −
1
3
,
2
3
.
(all currents in amps). The negative sign on I
34 means that current is flowing in the opposite direction than we assumed (i.e., current is flowing from node 4 to node 3, not from node 3 to node 4). One may easily check that KCL is indeed satisfied at the four nodes.
1.4
A Quick DC Sensitivity
Sensitivity analysis is the study of how the value of a problem’s solution, or some function of that solution, changes as we tweak the value(s) of either the solution (vector) or some other model parameter. As a quick introduction to sensitivity analysis, we examine the sensitivity of the vector of voltages in the ladder circuit problem when we change the current injected at a single node. We do this analysis to demonstrate a basic method for calculating sensitivities ( e.g.
a locational marginal price is an example of a sensitivity).
To calculate the sensitivity of a solution to a change in a variable , we start with a square system of equations Ax = b (in our example, A ∈
R
4 × 4
, x ∈
R
4 × 1
, and b ∈
R
4 × 1
Since we are examining the sensitivity of the solution of this system, we assume such a solution exists, and denote it as x
∗
( 0 ), or the “base case” solution. We denote the amount by which we wish to change a given variable as χ ∈
R
1
. At the base case solution, none of the problem inputs have changed at all. Therefore, the base case corresponds to χ = 0
A non-zero value for χ will refer to a “change case.” For example, we may change an
22
We assume the reader is familiar with matrix algebra, so we do not go into details such as conditions for matrix invertibility.
23
The notation is, admittedly, a bit squirrelly, since we change only one variable when performing a
19
admittance from Y i to Y i
+ χ , or change a current source from I j to I j
+ χ . Let us denote the change-case equation as:
A ( χ ) x
∗
( χ ) = b ( χ ) .
(1.27)
That is to say, the coefficient matrix and right hand side vector are now dependent on (or functions of) χ .
We calculate a sensitivity for x
∗
(0) as the partial derivative of the original solution vector
( i.e.
, the base case) to a change in a specific variable, the latter of which we denote as χ j
.
First, since the base case corresponds to no change in any variable, we will denote the base case equation as:
A ( 0 ) x
∗
( 0 ) = b ( 0 ) .
To calculate the sensitivity of the original solution to a change in a variable, solve for the derivative of the base-case solution with respect to the variable in question. To evaluate
this derivative, start by totally differentiating (1.27):
∂ A ( 0 ) x
∗
( 0 ) d χ j
+ A ( 0 )
∂χ j
∂ x
∗
( 0 )
∂χ j d χ j
=
∂ b ( 0 )
∂χ j d χ j
.
Since the d χ j terms all cancel, we solve the remaining equation for
∂ x
∗
( 0 )
, obtaining:
∂χ j
∂ x
∗
( 0 ) = [ A ( 0 )]
− 1
∂χ j
∂ b
∂χ j
∂ A
( 0 ) −
∂χ j
( 0 ) x
∗
.
Let us return to the example shown in (1.25) - the ladder network with current injections
I
1 and I
4 equal to one amp each, and admittances Y a
— Y g wish to calculate the sensitivities of the voltages obtained, ( x equal to one unit each. We
∗
)
0
=
"
2
3
1
3
1
3
2
3
#
, to a change in the node 1 current source from below:
I
1 to I
1
+ χ j
. We show this change in (1.28),
Y a
+ Y b
− Y b
0
0
Y b
− Y
+ Y c
0 b
− Y d
+ Y d
Y d
0
− Y d
+ Y e
+ Y f
− Y f
0 V
1
0
− Y f
Y f
+ Y g
V
2
V
3
V
4
=
I
1
+ χ j
0
0
.
I
4
(1.28) sensitivity analysis. And yet we alternatively speak of “ A ( 0 )” and“ A ( χ ).” Perhaps the best explanation is that as soon as we perturb one variable, designated as χ , the original solution vector no longer holds.
20
Notice that
∂ A
∂χ
· = 0 and
∂ b
∂χ j
0
· = [1 0 0 0]. Finally, inverting the matrix, as found
on the lhs of (1.26), and multiplying, we obtain:
∂ x
∗
( 0 ) = [ A ( 0 )]
− 1
∂χ j
∂ b
∂χ j
( 0 ) =
0 .
6191
0 .
2381
0 .
0952
.
0 .
0476
1.5
The DC Approximation to the AC Network: Calculating
PTDFs
We started with DC network calculations to familiarize the reader with concepts used in the analysis of an AC Network. Electrical engineers, intrepid folks that they are, will actually
set up and solve AC power flow problems as systems on non-linear equations.
Energy economists generally study linearized versions of the AC power equations, though. The obvious advantage of linearizing these systems is that one need not run iterative algorithms to find the critical points for systems of non-linear equations.
This section focuses on only one element of linearized AC analysis, the calculation of
PTDFs. Doing so, we will present the reader important concepts such as the Jacobian of power balance equations (as derived in Appendix A), noting the similarity between this matrix and the admittance matrix of the linearized AC system (derived in Appendix B).
We believe that the advantage of this approach is that it is incremental. We introduce the reader to these important concepts in the context of the evaluation of a single system of equations, rather than throwing the reader the several derivations necessary to solve the optimal power flow problem all at once.
1.5.1
Linearizing AC Power Equations
We derive the equations for power balance and power flow across transmission lines in
Appendix A. (1A.8) and (1A.9), shown below:
P
Q
`
`
=
= n
X u
` u k
[ G
`k cos( θ
`
− θ k
) + B
`k sin( θ
`
− θ k
)] , k =1 n
X u
` u k
[ G
`k sin( θ
`
− θ k
) − B
`k cos( θ
`
− θ k
)] , k =1
24
Well, perhaps they are not that intrepid, since available computer packages solve the problems for them!
21
are called power flow equality constraints,
and must be satisfied at each bus ` in order for
the power system to maintain a constant frequency.
(1A.12) and (1A.13) display power flow across transmission lines as:
˜
`k
= ( µ
`
)
2
G
``
+ u
` u k
[ G
`k cos( θ
`
− θ k
) + B
`k sin( θ
`
− θ k
)] , q
`k
= − ( µ
`
)
2
B
``
+ u
` u k
[ G
`k sin( θ
`
− θ k
) − B
`k cos( θ
`
− θ k
)] .
The linearized AC model is generally known as the DC approximation to the AC network.
Thus, in this model terms such as reactive power and impedance are assumed away. We make two simplifying assumptions to transform the complex admittance matrix to its DC approximation: we set its real terms, G
`k
, equal to zero and ignore the shunt elements
( i.e.
, the terms corresponding to node 0, or the ground). This reduces (1A.8) and (1A.12) to:
P
` p
`k
= n
X u
` u k
[ B
`k sin( θ
`
− θ k
)]
k =2
= u
` u k
[ B
`k sin( θ
`
− θ k
)] .
(1.29)
(1.30)
We finish linearizing these equations by assuming that the base-case solution (the point of reference for our derivatives) involves zero net power flow at nodes 2 — n , and all voltage magnitudes equal to one per unit, so that u ( 0 ) = 1
. This reduces (1.29) and (1.30) to:
P
`
= n
X
B
`k sin( θ
`
− θ k
) , k =2
˜
`k
= B
`k sin( θ
`
− θ k
) .
(1.31)
(1.32)
At this point we deviate from the standard methodology by linearizing these equations about the base-case solution for (real) power. As per Baldick (2006, p. 343), we define a flat start as the state of the system corresponding to phase angles equal to zero at all nodes and all voltage magnitudes equal to one (which, in fact, is the base-case solution to the
problem when we ignore the circuits shunt elements).
As we will see shortly, the model
∂sinθ is now linear at the base-case solution, because = 1.
∂θ
θ =0
25 The power flow equality constraints express the relationship that complex power generated at bus ` is equal to voltage times (the complex conjugate of) current.
26 into a generic node, ` , as the sum of its real P
` and reactive Q
`
√
− 1 components.
28
The traditional interpretation of DC power flow emphasizes small angle approximation to sine and cosine ( i.e.
cos( θ i
− θ k
) ≈ 1 , sin( θ i
− θ k
) ≈ ( θ i
− θ k
)), and the solution of DC power flow being the same as the solution of an analogous DC circuit with current sources specified by the power injections and voltages specified by the angles (see Schweppe et al .(1988), Appendix D). While our presentation differs from the standard, the reader should be able to digest the traditional method once they have solved ours.
22
1.5.2
Calculating PTDFs
The term PTDF, or “shift factor,” means the change in the flow of power across a particular transmission line, `k , induced by an incremental increase in power output at a given node.
The alert reader will note that there exist N shift factor matrices, each one corresponding to the change in power flow across all lines in the system as the result of an increase in power generation at one of the system’s N nodes. Mathematically, we calculate a realpower shift factor as
∂ ˜
`k
∂P j
. We denote this matrix as L j
=
∂ ˜
`k
. This is the matrix
∂P
( m ) j of incremental line flows across all of a systems lines due to an injection of power at node j and withdrawal of that power at node m , for each of the systems other nodes. Power injected and withdrawn at the same node has PTDF
( j ) j
= 0, trivially.
We cannot take the desired partial derivative directly, because there is no explicit term for
P j
∂ ˜
`k
∂P j
=
∂ ˜
`k
∂θ i
∂θ i
∂P j
.
We obtain the second term, of course, by inverting the Jacobian corresponding to
∂P j
.
∂θ i
Differentiating these equations is now fairly straightforward. First, we shorthand equation
(1.31) to express net power flow from node
` as a function of phase angles and voltage injections, and the vector of net power flows as:
P
`
= p
`
θ
µ
,
P = p
θ
,
µ respectively. As alluded to earlier, there are ( n − 1) degrees of freedom in the power balance equations, because power balance indicates that one cannot specify the power balance equation at the n th node independently of the power balance in the rest of the system.
Therefore, we subtract a row and column of the power-balance Jacobian. It is customary to denote the node corresponding to the omitted row and column as the “reference” node.
As shown below, we calculate shift factors by treating the reference node as the node at which power is withdrawn. As is also customary, we denote the reference node as node 0.
29 the only drawback of this approach is that we have already denoted the ground node as node 0, and the ground node and the reference node are not the same thing. However, since we have assumed away the shunt elements, we are not examining the ground node any longer. Thus, there should be no further confusion regarding denoting the reference node as node 0
23
We will demonstrate the calculation of two different Jacobians for expositional clarity.
Denote the power-balance Jacobian (nodal Jacobian) for all of the system’s nodes (the “full” nodal Jacobian) as J pθ
, and the Jacobian for all the system’s nodes, excepting the reference
J pθ
, respectively. The term pθ indicates that we are taking the derivatives of real power flows with respect to phase angles. When solving for PTDFs, we will use the reduced nodal Jacobian because the power-balance equations have ( n − 1) degrees of freedom. Remembering that we are evaluating the linearized power balance equations, we write the reduced nodal Jacobian for our calculation of network shift factors as:
J
ˆ (0) pθ
J pθ
0
1
=
∂ ˆ
∂θ
0
1
(1.33)
(that is, we evaluate this Jacobian at a flat start).
Next we examine the Jacobian for the equations of real-power flow over the transmission lines (branch Jacobian): K ∈
R k × n − 1
. This matrix has k rows, one for each of the equations for the systems transmission lines (ignoring shunt elements). Again, because the system behaves differently when power is withdrawn at each of the system’s non-reference nodes, there are ( n − 1) of these matrices, one every node at which we may withdraw power when power is injected at a set node. We denote the branch Jacobian, evaluated at the base-case of a flat start, as:
K
(0)
= K
0
1
=
∂ p ˜
∂θ
0
1
(1.34)
For expositional simplicity, let us now solve (1.33) and (1.34) and the resulting shift fac-
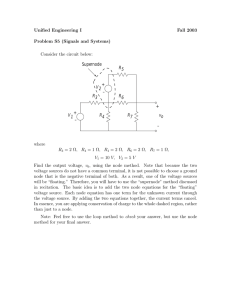
tors for a sample network before introducing the general notation corresponding to these equations. Consider the 5-node model shown below. The value shown between each node pair is the impedance of the transmission line connecting the two nodes. Let us choose node 1 as the reference node, so that we will replace the notation “1” with “0” whenever we refer to this node.
24
Node 4 0 + j 0 .
004 Node 2
0 + j 0 .
001
0 + j 0 .
001 0 + j 0 .
001 Node 0
0 + j 0 .
001
Node 5 0 + j 0 .
004 Node 3
Figure 1.10: A Sample Network
Each line, `k , has R
`k
= 0. That is, the real part of impedance ( i.e.
resistance) is zero for all lines. This corresponds to the assumption that the real component of conductance
( i.e.
the inverse of impedance) is zero as well. The complex component of impedance
( i.e.
reactance) is given by X
`k
− 1. Invert each lines impedance to derive its admittance, denoted Y
`k
:
Y
02
= Y
03
= Y
23
= Y
45
=
1
0 + j 0 .
001
= j 1 , 000 ,
Y
24
Note that
= Y
Y
`k
35
=
1
0 + j 0 .
004
= B
`k
√
− 1.
= j 250 .
For any node ` , we write sin( θ
`
− θ j
), for all nodes j connected to node ` by a transmission
line. We may thus express (1.31) for each of the five nodes in this example as:
P
0
= 1 , 000 sin( θ
0
− θ
2
) + 1 , 000 sin( θ
0
− θ
3
) ,
P
2
= 1 , 000 sin( θ
2
− θ
0
) + 1 , 000 sin( θ
2
− θ
3
) + 250 sin( θ
2
− θ
4
) ,
P
P
P
3
4
5
= 1 , 000 sin( θ
3
− θ
0
) + 1 , 000 sin( θ
3
− θ
2
) + 250 sin( θ
3
− θ
5
) ,
= 250 sin( θ
4
− θ
2
) + 1 , 000 sin( θ
4
− θ
5
) ,
= 250 sin( θ
5
− θ
3
) + 1 , 000 sin( θ
5
− θ
4
) .
Deriving the full nodal Jacobian for this example is straightforward, nonetheless, we show
25
explicitly the elements corresponding to the first row of this matrix:
J
(0)
11
=
J
(0)
12
=
J
(0)
13
=
∂P
0
∂θ
0 θ =0
∂P
0
∂θ
2 θ =0
∂P
0
∂θ
3 θ =0
= 1 , 000 cos( θ
0
− θ
2
) + 1 , 000 cos( θ
0
− θ
3
) = 2 , 000 ,
= 1 , 000 cos( θ
0
− θ
2
)( − 1) = − 1 , 000 ,
= 1 , 000 cos( θ
0
− θ
3
)( − 1) = − 1 , 000 .
Since neither θ
4 nor θ
5 are arguments of P
1
, their corresponding terms are obviously zero.
Taking the remaining partial derivatives yields the matrix:
2 , 000 − 1 , 000 − 1 , 000
0
0 0
− 1 , 000 2 , 250 − 1 , 000 − 250 0
− 1 , 000 − 1 , 000 2 , 250
0 − 250
0 − 250
0 1 , 250 − 1 , 000
.
0 − 250 − 1 , 000 1 , 250
A couple of characteristics of this matrix stand out immediately. First, notice the diagonal terms are equal to the sum of the off-diagonal elements times minus one. Recognizing that the off-diagonal term, J
(0)
`k as:
= − B
`k
, this allows us to shorthand the terms of this Jacobian
∂P
`
0
∂θ k
1
=
P
j ∈
J ( ` )
− B
`k
0
B
`j if k = `, if k ∈
J
( ` ) otherwise.
,
Second, notice that the full nodal Jacobian is symmetric (this fact makes calculation of the full AC model less computationally expensive).
As mentioned above, we omit the power flow equality constraint and partial derivatives corresponding to the base node in order to derive the reduced nodal Jacobian. Thus, the reduced system of equations is:
P
2
P
3
= 1 , 000 sin( θ
2
− θ
0
) + 1 , 000 sin( θ
2
− θ
3
) + 250 sin( θ
2
− θ
4
) ,
= 1 , 000 sin( θ
3
− θ
0
) + 1 , 000 sin( θ
3
− θ
2
P
4
= 250 sin( θ
4
− θ
2
) + 1 , 000 sin( θ
4
− θ
5
)
P
5
= 250 sin( θ
5
− θ
3
) + 1 , 000 sin( θ
5
− θ
4
) .
,
) + 250 sin( θ
3
− θ
5
) ,
32 We could really use some different subscript/superscript/parenthetical notation for the entries in this
Jabobian, but what we have will have to do for now.
26
We take the derivatives of these equations with respect to θ
2
, θ
3
, θ
4 and θ
5
, obtaining:
J
ˆ (0)
=
2 , 250 − 1 , 000 − 250 0
− 1 , 000 2 , 250
− 250
0 − 250
0 1 , 250 − 1 , 000
.
0 − 250 − 1 , 000 1 , 250 with inverse:
J
ˆ (0)
− 1
=
0 .
000655 0 .
000345 0 .
000517 0 .
000483
0 .
000345 0 .
000655 0 .
000483 0 .
000517
0 .
000517 0 .
000483 0 .
002724 0 .
002276
.
0 .
000483 0 .
000517 0 .
002276 0 .
002724
Notice that we do not remove the terms in power flow equality constraints P
2
— P
5 corresponding to the base node, because these terms capture the physical characteristics of the network ( i.e.
the transmission lines between the node in question and the base node).
To calculate the branch Jacobian, K , remember that this matrix is of dimension k × ( n − 1).
Accordingly, we will take derivatives of flows on the k = 6 transmission lines with respect to the N − 1 nodes at which power is injected.
Before taking these derivatives, however, we must determine the (reference) direction of power flow across all k lines. That is, we know that the equation for power flow across a p
`k
= B
`k sin( θ
`
− θ k
), where this equation indicates that power flows from node ` to node k . We just have to figure out whether, for any given node pair, power flows from node k to ` , or vice-versa. There is no one right answer to this question, though, because the direction of power flow will change whenever one changes the node at which power flows into the network ( e.g.
, the direction of flow across line 45 will be different if one injects power at node 2, versus injecting it at node 3).
Fortunately, this observation leads us to the correct method for assigning power flow direction. We simply designate both the node at which power is withdrawn and the node at which power is injected. Since we withdraw power at the reference node, we need only choose an additional, arbitrary, node at which to inject power. From here, we assign power flows such that no physical laws (First Law of Thermodynamics, Kirchhoffs laws) are violated. So, let us arbitrarily designate node 2 as the “injection” node. Having specified the injection node, one may follow two shortcuts to power flow direction:
1. Power flows to the reference node along the lines directly connected to it;
2. Power flows away from the injection node along the lines directly
33 These rules of thumb no longer hold with multiple points of injection and withdrawl, but that observation is not relevant to the present analysis.
27
Following these two shortcuts, we may assign directional power flows as follows:
Node 4 Node 2
Node 0
Node 5 Node 3
Figure 1.11: Directional Power Flows
The first observation tells us that power flows from nodes 2 and 3 to node 0. Load at node 0 draws power along lines 20 and 30. The second observation tells us that power flows away from node 2, to nodes 0, 3, and 4. All that remains is to determine directional flows along the lines connected to node 5. Kirchhoff’s Current Law tells us that the sum of currents entering a node equals the sum of currents exiting that node. Since no current
(or the power corresponding to it) is being withdrawn at node 4, all of the power entering node 4 will flow to node 5, indicating the direction of flow on this line. The same reasoning applies at node 5, so power flows from node 5 to node 3. Note that KCL also tells us that the current flowing from node 3 to node 0 is equal to the sum of currents flowing from nodes 2 and 5 to node 3.
Using the directional power flows indicated above, we write the six equations for power flow as:
˜
20
= 1 , 000( θ
2
− θ
0
) ,
˜
30
= 1 , 000( θ
3
− θ
0
) ,
˜
23
= 1 , 000( θ
2
− θ
3
) , p
24
= 250( θ
2
− θ
4
) , p p
53
45
= 250( θ
5
− θ
3
) ,
= 1 , 000( θ
4
− θ
5
) .
28
Taking the required derivatives across all equations yields:
K
0
1
=
1 , 000 0 0 0
0 1 , 000 0 0
250
0 −
0 − 250
250
0
0 250
.
0 0 1 , 000 1 , 000
We shorthand this matrix as:
K
( ij ) `
=
(
B ij if ` = i,
− B ij if ` = j.
Multiplying the two matrices yields the shift factor matrix ( H ) below:
P
2
P
3
P
4
P
5
H
0
1
= line 20 line 30 line 31 line 24 line 35 line 45
0 .
6552 0 .
3448 0 .
5172 0 .
4828
0 .
3448 0 .
6552 0 .
4828 0 .
5127
0 .
3103 − 0 .
3103 0 .
0345 − 0 .
0345
0 .
0345 − 0 .
0345 − 0 .
5517 − 0 .
4483
0 .
0345 − 0 .
0345 0 .
4483 0 .
5517
.
0 .
0345 − 0 .
0345 0 .
4483 − 0 .
4483
To interpret this matrix, observe that column values indicate the source of the power, that is, the node at which power is generated (as well at the phase angle corresponding to this
The row value corresponds to the line over which this power flows. Therefore, the columns of the matrix yield the PTDFs for every line in the network when power is injected at the node corresponding to that column and withdrawn at the reference node.
Reading down the first column, then, 65.52 percent of the power generated at node 2 flows directly to node 0. The remaining 34.48 percent flows in a more circuitous fashion along the networks other lines. 31.03 percent flows from node 2 through node 3 to node 0, while
3.45 percent flows around the horn, from node 2 to node 4 to node 5 to node 3 and on to node 1. As mentioned above, the amount exiting node 3, 34.48 percent of the increment of power generated, is equal to the sum of the flows entering that node: 31.03 percent, plus
3.45 percent.
34 Even though we assume that no power is generated at nodes 1-3, we may, in principle, calculate shift factors for any node in a transmission system.
29
1.A
Power Equation Derivation
When current and voltage are in phase, an electrical system is producing its maximum efficiency of (real) power output. A graphical analysis is illustrative. Consider first relationship between power, current, and voltage for a purely resistive system.
P, I, E
Instantaneous Voltage
Instantaneous Current
Instantaneous Power time
Figure 1A.1: Current, Voltage, and Power in a Purely Resistive System
As shown in Figure 1A.1, above, when current and voltage are in phase, power is strictly nonnegative because voltage is never positive when current is negative, and vice-versa.
As voltage and current move out of phase, though, this synchronicity vanishes. Consider the inductor example from Figure 1A.2, with instantaneous power added to instantaneous current and voltage.
P, I, E
Instantaneous Voltage
Instantaneous Current
Instantaneous Power time
Figure 1A.2: Current, Voltage, and Power in a Purely Inductive System
Since voltage and current are 90
◦ out of phase for a purely inductive current, half of the time voltage and current will be of the same sign, while they will be of opposite sign the other half of the time. This causes power in this circuit to alternate in cycles of positive and negative values. Positive power means that load in the system is receiving (absorbing)
30
power from the generation source(s), while negative power means that power is actually being returned to the generation source. This means that reactive components (inductors and capacitors) dissipate zero power, as they equally absorb power from, and return power
Adding capacitance into the picture, of course, means that the circuit’s phase angle will decrease, moving voltage and current closer into phase and allowing for positive power output, as shown graphically in Figure 1A.3 below:
P, I, E Instantaneous Voltage
Instantaneous Current
Instantaneous Power time
Figure 1A.3: Current, Voltage, and Power in a Resistive/Reactive Circuit
In a circuit characterized by both resistance and reactance, voltage and current are out of phase by less than | 90
◦
| , and power cycles between positive and negative values, but net power output is positive.
When calculating power in circuits with reactive and resistive elements, we apply Ohm’s law. Once again denoting reactance by X , resistance by R , impedance by Z , current by I , and voltage by E , we have the following three expressions for Ohms law:
E = I × R (circuit with resistive elements only) ,
E = I × X (circuit with reactive elements only) ,
E = I × Z (circuit with resistive and reactive elements).
Note that the basic relationship, voltage equals current times resistance, is unchanged. The point is simply that the nature of resistance varies with the different resistance sources.
Since the basic relationship for power is unchanged as well, power for resistive, reactive,
35
For further reading, see Rau(2003), Appendix A, and Mittle and Mittal, Ch. 6 - 8.
31
and resistive plus reactive circuits is, respectively:
P = | I |
2
× R,
Q = | I |
2
× X,
S = | I |
2
× Z, where:
• P is real power, measured in Watts,
• Q is reactive power, measured in volt-amperes reactive (VAR), and
• S is apparent power, measured in volt-amperes (VA).
(1A.1)
Just as we expressed the relationship between resistance, reactance, and impedance with a right triangle, we express the relationships between different power elements with the power triangle . Consider a circuit containing a 60 volt power source, a capacitor rated at
30 farads, and a 20Ω resistor. In order to calculate P , Q , and S for this circuit, we must calculate the current flowing through it. Impedance is simply:
Z = p
R 2 + X 2 = 36 .
06Ω .
Therefore, current is:
E
I =
Z
Real Power is:
= 1 .
66 amps .
P = I
2
R = 55 .
1 watts , reactive power is:
Q = I
2
X = 82 .
7 VAR , and complex power is:
S = I
2
Z = 99 .
4VA .
The power triangle is shown graphically as:
S
Q
P
Figure 1A.4: The Power Triangle
32
It is straightforward to verify that P/S = R/Z , and so one may derive the phase angle either through either power or impedance manipulations. The former expression is commonly known as the power factor . The ability to reduce a systems phase angle is known as reactive power supply . Only generators with this ability may compete in the reactive power market.
Like we calculated instantaneous power for purely resistive circuits in (1A.1), we may also calculate instantaneous power for a purely inductive circuit, a purely capacitive circuit, and a combined resistive-reactive circuit. For a purely inductive load, current lags voltage by 90
◦
. Therefore, we have: i ( t ) = I max cos( θ − 90) , v ( t ) = V max cos θ.
Instantaneous power is then: p ( t ) = V max
I max cos θ cos( θ − 90) ,
= V max
I max cos θ sin θ,
= | V || I | sin(2 θ ) .
Integrating over [0 , 2 π ], we find that instantaneous power for a purely inductive circuit does indeed have an average value of zero, as argued above. One may also show that average power for a purely capacitive circuit is zero, as found by integrating −| V || I | sin(2 θ ). Finally, for mixed resistive/reactive circuits, we may write: p ( t ) = V max
I max cos θ cos( θ − δ ) ,
=
V max
I max
[cos
2
2
θ cos δ − sin
2
θ cos θ + cos δ + 2 sin θ cos θ sin δ ] .
The first three terms inside the parentheses reduce to (cos θ )(1 + cos 2 θ ), while the fourth reduces to (sin θ )( sin 2 θ ). Thus, we may express instantaneous power in a single-phase AC circuit as: s ( t ) =
V max
I max
(cos δ )(1 + cos 2 θ ) +
2
V max
2
I max
(sin δ )(sin 2 δ
Alternatively, since | V | = V max
/
√
2 and | I | = I max
/
√
2, we have
) .
s ( t ) = | V || I | (cos δ )(1 + cos 2 θ ) + | V || I | (sin δ )(sin 2 θ ) .
(1A.2)
The first term is once again real power, while the second term is reactive power. Note that when the phase angle is equal to zero, reactive power is equal to zero, as expected. These
33
equations give us an alternative method for calculating average real, reactive, and complex power in AC circuits. We calculate average real power as:
1
2 π
Z
2 π
| V || I | (cos δ )(1 + cos 2 θ )d θ = | V || I | cos δ.
0
(1A.3)
By inspection, (1A.3) is at a maximum when δ = 0. Notice that since k
R
2 θ
0 the average value of reactive power from (1A.2) is always zero.
sin 2 θ d θ = 0 ,
We will also find it useful to express power in terms of the systems admittance matrix. To do this, we note that complex power injected into the network at bus ` is given by:
S
`
= V
`
I
`
∗
.
(1A.4)
Post-multiplying the admittance matrix, given by Eq. (36), by the voltage vector V once again yields AX = I , with individual elements:
I
`
= A
``
V
`
X k ∈
J ( ` )
A
`k
V k
.
(1A.5)
Substituting (1A.5) into (1A.4) yields
S
`
= V
`
"
A
``
V
`
+
X k ∈
J ( ` )
A k
V k
#
∗
= | V
`
|
2
A
∗
``
+
X k ∈
J ( ` )
A
∗
`k
V
`
V k
.
We may break down complex power into real and reactive power, starting by dividing the admittance terms into their real and imaginary components. Let us start with the expression for admittance as the inverse of impedance. That is, given Z
`k
= R
`k
+ jX
`k
,
Y
`k
=
1
Z
`k
=
1
R
`k
+ jX
`k
=
1
R
`k
+ jX
`k
×
R
`k
− jX
`k
R
`k
− jX
`k
=
R
`k
( R
`k
) 2
− jX
`k
+ ( X
`k
) 2
.
(1A.6)
Using Eq. (1A.6), we define the real and imaginary parts of resistance, G
`k respectively, as follows: and B
`k
,
G
`k
=
B
`k
=
( R
`k
) 2
R
`k
+ ( X
`k
) 2
( R
`k
) 2
X
`k
+ ( X
`k
) 2
.
Therefore,
Y
`k
= G
`k
− jB
`k
.
(1A.7)
34
When writing the equations for complex power, the notation V max gets cumbersome. So at this point we replace V max with u
We employ Eulers identity to write complex voltage at node ` as:
V
`
= u
` e jθ
` , and complex power as:
P
`
+ jQ
`
=
=
X u
` u k
( G
`k
− jB
`k
) e j ( θ
`
− θ k k ∈
J
( ` ) ∪ `
X u
` u k
G
`k cos( θ
`
− θ k
) + B
`k sin θ
`
− θ k
) k ∈
J
( ` ) ∪ `
+ ju
` u k
G
`k sin( θ
`
− θ k
) − B
`k cos θ
`
− θ k
) , where:
P
`
=
Q
`
=
X u
` u k
G
`k cos( θ
`
− θ k
) + B
`k sin θ
`
− θ k
) , k ∈
J
( ` ) ∪ `
X u
` u k k ∈
J
( ` ) ∪ `
G
`k sin( θ
`
− θ k
) − B
`k cos θ
`
− θ k
) .
(1A.8)
(1A.9)
(1A.8) and (1A.9) are known as power flow equality constraints, and must be satisfied at each bus ` of the power system. Note that the lhs of this equation represents net power flow out of node ` . If real/reactive power generation at this node is greater than real/reactive power consumption , then P
`
, Q
`
> 0, respectively. The rhs of the equation represents the fact that this net power flow travels across the transmission network, from the given node, ` , to the nodes with which it is connected k ∈
J
( ` ). Summing up all of these positive
(indicating net power flow from node ` to node k) and negative (vice-versa) power flows, we arrive at the net real/reactive power flow out of node ` . Finally, the KCL implies that net power flow out of node ` is equal to the sum of the power flows along each line connected to that node, so we write the power balance constraints as: p
`
( x ) = q
`
( x ) =
X u
` u k
G
`k cos( θ
`
− θ k
) + B
`k sin θ
`
− θ k
) − P
`
= 0 , k ∈
J
( ` ) ∪ `
X u
` u k k ∈
J
( ` ) ∪ `
G
`k sin( θ
`
− θ k
) − B
`k cos θ
`
− θ k
) − Q
`
= 0 .
(1A.10)
(1A.11)
36
We use alternate notations because electrical engineering texts do, and we wish to expose the reader to these stylistic differences. Our exposition is closest to that of Baldick (2006, Ch. 6.2).
35
We also derive the formulas for power flow across a given line `k , connecting buses ` and k, in the direction of ` to k. For a simple circuit with no shunt elements, the flow of power across line `k would be equal to: u
` u k
G
`k cos( θ
`
− θ k
) + B
`k sin( θ
`
− θ k
)
This equation simply refers to the drop in voltage (and thus power flow) moving across nodes in a series circuit. Once we take explicit account of the elements connecting generation to the transmission system (the shunt elements), we have to take into the consideration the power sourcing at these elements. We derive this element of the power flow equation by setting k = ` in equations (1A.10) and (1A.10). Doing so yields the quantities: u
` u k
G
`` cos( θ
`
− θ k
) + B
`` sin( θ
`
− θ k
) = ( u
`
)
2
G
``
, and, in the same manner, − ( u
`
)
2
B
``
.
Therefore, denoting real power flow across line `k in the direction of k as ˜
`k
(and doing so analogously for reactive power flow), we have:
˜
`k
= ( u
`
)
2
G
``
+ u
` u k
G
`k cos( θ
`
− θ k
) + B
`k sin( θ
`
− θ k
) , q
`k
= − ( u
`
)
2
B
``
+ u
` u k
G
`k sin( θ
`
− θ k
) − B
`k cos( θ
`
− θ k
) .
(1A.12)
(1A.13)
Likewise, we may rewrite (1A.10) and (1A.11) as:
P
`
= u
2
`
G
``
+
X u k ∈
J
( ` )
X
Q
`
= − u
2
`
B
``
+
` k ∈
J
( ` ) u k u
`
[ G
`k u k
[ G cos( θ
`
− θ k
) + B
`k sin( θ
`
`k sin( θ
`
− θ k
) − B
`k cos(
− θ k
)] ,
θ
`
− θ k
)] .
(1A.14)
(1A.15)
36
1.B
Admittance Matrix for the DC Approximation to the
AC Circuit
For convenience, we return to the admittance matrix for the ladder circuit from (1.25).
For clarity, however, we now denote the admittances with double subscript notation Y
`k
, to denote the admittance of the line connecting nodes ` and k (e.g., Y a now becomes Y
01
, because line a connects nodes 0 and 1). We may thus express the admittance matrix from
Y
02
+ Y
12
− Y
12
−
0
Y
12
0
Y
12
+ Y
02
+ Y
23
− Y
23
− Y
23
Y
23
+ Y
30
0 0 − Y
34
+ Y
34
− jB
jB
12
0
0
12
0
0
− Y
34
Y
34
+ Y
40
,
From (1A.7) we have Y
`k
= G
`k
− jB
`k
, which we could plug in for each value in the matrix above. However, at this point we simplify the matrix by setting the real component of admittance equal to zero. Electrical engineers justify this assumption by noting that
| G
`k
| | B
`k
| .
Further, we neglect the shunt elements in the line models. The electrical engineering justification for this is that shunt components sometimes have values such that their effect on the circuit is negligible. This reduces the admittance matrix to:
jB
12
− j ( B
12 jB
23
0
0 0
+ B
23
) jB
23
− j ( B
23 jB
34
0
+ B
34
) jB
34
− jB
34
.
37
Chapter 2
The Newton-Rhapson Method and
AC OPF
Having tackled the basic concepts of AC power flow and linearization of AC power flow equations and related shift factor calculations, we are ready to move on to the optimal power flow problem itself. At this point, even though most energy economists will not delve into solutions of systems of nonlinear equations (rather, the energy economist will normally just skip directly to the DC approximation of the AC optimal power flow problem), in this chapter we tackle the nonlinear AC system to present the reader with additional background material for the presentation of the DC approximation.
2.1
The Newton-Rhapson Method
AC power flow is captured by a system of nonlinear equations. Thus, before moving to the solution of the AC optimal power flow problem (OPF), we must first introduce a method for solving systems of nonlinear equations. Except in relatively simple cases, analytical solutions to systems of nonlinear equations will not exist. Therefore, our best hope is to approximate the solution to this system of equations with a high degree of accuracy (to be specified by the researcher). One uses an iterative algorithm to find this answer. In an iterative algorithm, the researcher makes an initial estimate as to a problem’s solution and tries to improve upon this conjecture with successive iterates of the algorithm. The Newton-
Rhapson method is quite popular in electrical engineering texts, so we will demonstrate it.
38
The general form for the iterates created by an iterative algorithm is: x v +1
= x v
+ α v
∆ x v v = 1 , 2 , 3 . . . , where:
• x
0 is initial estimate of the solution,
• v is iteration counter,
• x v is the value of the iterate at the v -th iteration,
• α v is step size, usually 0 < α ≤ 1,
• ∆
• α v x v
∆ x is the step direction, and v is the update to x v to obtain x v +1
.
Let us consider a function g ( · ) :
R n →
R n and suppose we wish to solve the system of simultaneous nonlinear equations g ( x ) = 0 . We start with an initial estimate to the solution, x
0 ∈
R n
. We may think of this guess as our predicted answer, based on our understanding of the problem. Except in the rare circumstance that our first conjecture is exactly correct, we will have g ( x ) = 0 , and will wish to find an updated vector x 1 = x
0
+ ∆ x
0 such that: g ( x
1
) = g ( x
0
+ ∆ x
0
) = 0 .
A first-order Taylor approximation of g ( · ) about x
0 yields: g ( x
1
) = g ( x
0
+ ∆ x
0
) ≈ g ( x
0
) +
∂g
∂x x
0
∆ x
0
.
(2.1)
For a square system of equations we may write g ( x
0 fore:
+ ∆ x
0
) ≈ g ( x
0
) + J ( x
0
)∆ x
0
. Thereg ( x
1
) = g ( x
0
+ ∆ x
0
) ≈ g ( x
0
) + J ( x
0
)∆ x
0
.
(2.2)
Since we seek an x
1 such that choose a value for ∆ x
0 g ( x such that:
1
) = 0, and the rhs of (2.2) approximates g ( x
1
), we will g ( x
0
) + J ( x
0
)∆ x
0
= 0 .
Solving (2.3) for ∆ x
0 yields ∆ x
0
= J ( x
0
)
− 1 g ( x
0
). The stage zero update is thus:
∆ x
0
= J ( x
0
)
− 1 g ( x
0
) , x
1
= x
0
+ ∆ x
0
.
(2.3)
(2.4)
(2.5)
Equations (2.4) and (2.5) constitute the stage zero Newton-Rhapson update, and ∆ x
0 the stage zero Newton-Rhapson step direction. More generally, at any stage v we have: is
∆ x v
= J ( x v
)
− 1 g ( x v
) , x v +1
= x v
+ ∆ x v
.
(2.6)
(2.7)
39
Example 2.1: Newton-Rhapson method
Consider the system of simultaneous non-linear equations g ( x ) = 0 , where g ( · ) : is defined by:
R
2 →
R
2
∀ x ∈
R
2
, g ( x ) =
" 1
2 x
1
( x
1
)
+
2
+ x
2
− 4
#
.
1
2
( x
2
)
2 − 7
We expect that the pair of quadratic equations will have multiple roots. Let us focus on the positive root pair. Since x
2 is of larger power in the expression with larger absolute value
( i.e.
7), our initial estimate will have x
2 greater than x
1
. One method for an initial choice is to solve one of the equations exactly, while “eyeballing” the other. Let us start, then, with an initial guess of ( x
0
)
0
= 1 3 .
5 . This conjecture yields [ g ( x )
0
]
0
= 0 0 .
125 . To calculate the Newton-Rhapson update, ∆ x
0
, we must find, and then invert, the Jacobian
J ( x
0
). By inspection,
J ( x
0
) = x
1
1
1 x
2
.
Inverting this matrix, we find that:
J ( x )
− 1
=
x
2
x
1 x
2
− 1
− 1 x
1 x
2
− 1
− 1 x
1 x
2 x
1
− 1
.
x
1 x
2
− 1
Therefore,
− J ( x )
− 1 g ( x
0
) = −
1 .
4 − 0 .
4
− 0 .
4 0 .
4
0
0 .
125
, or,
(2.8)
(2.9)
∆ x
0
=
0 .
05
− 0 .
05
.
Thus we have that: x
1
=
1 .
05
3 .
45
.
Next we must decide if we wish to stop here, or perform another iteration. There are three basic rules for determining when to stop iterating: (1) the step size, ∆ x v
, is sufficiently small; (2) the error term, g ( x v ) , is sufficiently small (where “small” is determined by a metric of the researcher’s choosing); or (3) after a fixed number of iterations. Since we
40
are simply demonstrating the method, we will stop after two iterations. Given the update,
( x
1
)
0
= 1 .
05 3 .
45 , we compute g ( x
1
)
0
= 0 .
00125 0 .
00125 . To perform the second iteration, we insert the values x
1 into (2.8) and iterate on (2.9), finding:
− J ( x
1
)
− 1 g ( x
1
) = −
1 .
31554 − 0 .
38132 0 .
00125
− 0 .
38132 0 .
40038 0 .
00125
, or,
∆ x
1
=
− 0 .
00117
− 0 .
00002
.
Therefore, ( x
2
)
0
= 1 .
049998 3 .
44883 , and g ( x
2
)
0
= 0 .
00006 − 0 .
00281 .
Notice that we have“overshot” the value of x
2
, in that | g ( x
2
2
) | is greater than | g ( x
1
2
) | . This is where the issue of step size comes in. We wish to decrease absolute values of the errors for all elements of x from one repetition to the next. Therefore, one would generally perform a new stage 2 iteration to obtain:
∆ x
2
= x
1
+ α
1
∆ x
1
, α
1
< 1 .
It is common to iterate using α v i
= (
1
2
) i
, i = 0 , 1 , 2 , . . . , where α v i is the i th iterate of α at stage v of the Newton-Rhapson update, and to stop iterating on α when the error term has fallen by the desired amount, as specified by the researcher.
Having demonstrated (if briefly) the Newton-Rhapson method, the next step in solving an
AC optimal power flow problem is to set up the problem using this method. To do this, we return to equations (1A.14) and (1A.15)for real and reactive power flow, respectively:
P
`
Q
`
= u
2
`
G
``
+
X u k ∈
J
( ` )
X
= − u
2
`
B
``
+
` k ∈
J ( ` ) u k u
`
[ G
`k u k
[ G cos( θ
`
− θ k
) + B
`k sin( θ
`
`k sin( θ
`
− θ k
) − B
`k
− θ k
)] , cos( θ
`
− θ k
)] .
41
Example 2.2: 2-node power-flow problem
Let us examine the power flow equations in a simplistic two-node network, as illustrated below:
P g 1
Q g 1
= 0 .
6
= 0 .
3 u
1
θ
1
= 1 .
0
= 0 .
0
1
X
12
X
12
= j 0 .
25
Figure 1: The 2-Node Network
2
P d 2
Q d 2
= 0 .
6
= 0 .
3 u
2
= ?
θ
2
= ?
As discussed in Chapter 1, we will solve this power-flow problem by designating a node
(node 1) as the reference node (not bothering to denote it as “0”). By convention, we set the phase angle at the reference node, θ
1
, equal to 0.0 (radians). We will also set the reference voltage, u
1
, equal to one per unit (1 p.u.). In this example, the generator at node
1 produces 0.6 units of real power and 0.3 units of reactive power, consumed by load at no resistance, but only impedance, equal to j 0 .
25, where again, j =
√
− 1. We also ignore the impedance of any ground (shunt) elements. Our problem is now to solve for the two unknowns, voltage angle and magnitude at node 2. Applying the power-flow equations for real and reactive power at node 2 to this example, we have:
− 0 .
6 = ( u
2
)
2
· 0 + 1 · u
2
[4 sin( θ
2
)] ,
− 0 .
3 = 4( u
2
)
2 − u
2
· [4 cos( θ
2
)] .
That is, we have a system of two nonlinear equations in two unknowns, which we will
(approximately) solve using the Newton-Rhapson method. Carrying all terms over to the lhs, we have: u
2
[4 sin( θ
2
)] + 0 .
6 = 0 ,
4( u
2
)
2
− u
2
[4 cos( θ
2
)] + 0 .
3 = 0 .
To use the Newton-Rhapson method, we make initial estimates for the two unknowns as x
0
=
"
θ
0
2
# u 0
2
=
0
1
.
42
This estimate yields initial errors, g ( x
0
) =
0 .
6
0 .
3
.
Next, we partially differentiate the equations wrt the unknowns, yielding:
J ( x ) =
∂p
2
∂θ
2
∂q
2
∂θ
2
∂p
2
∂u
2
∂q
∂u
2
2
=
"
4 u
2 cos( θ
2
) 4 sin( θ
2
)
4 u
2 sin( θ
2
) 8 u
2
− 4 cos( θ
2
)
#
The stage zero update, from (2.6) and (2.7), is the solution to:
.
4 cos(0) 4 sin(0)
4 sin(0) 8 − 4 cos(0)
∆ θ
∆ u
0
2
0
2
Inverting and multiplying, we obtain:
=
−
−
0
0
.
.
6
3
.
∆ x
0
=
− 0 .
15
− 0 .
075
,
θ
1
2 u
1
2
= θ
0
2
+ ∆ θ
0
2
= u
0
2
+ ∆ u
0
2
= 0 .
0 − 0 .
15 = − 0 .
15 rad,
= 1 .
0 − 0 .
075 = 0 .
925 p.u.
The new errors are g ( x
1
) =
" g ( x 1
1
)
# g ( x
1
2
)
=
"
4(0 .
925) sin( − 0 .
15) + 0 .
6
− 4(0 .
925)
2
+ 4(0 .
925) cos( − 0 .
15) + 0 .
3
#
=
0 .
047079
0 .
064047
.
Stopping Criterion: We will stop when each of the errors are less than 3 ∗ 10
− 3
.
The firstiteration errors do not satisfy this criteria, so we perform another iteration. The stage one update is then:
3 .
658453 − 0 .
597753
− 0 .
552921 3 .
444916
− 1
− 0 .
047079
− 0 .
064047
=
−
−
0
0
.
.
016335
021214
.
The updated values are:
θ
2
2 u
2
2
= − 0 .
15 − 0 .
016335 = − 0 .
16635 rad, and
= 0 .
925 − 0 .
021214 = 0 .
903786 p.u.,
43
and the new errors are:
[ g ( x
2
)]
0
= [0 .
001391 , − 0 .
002077] .
Since these errors satisfy the stopping criterion, the procedure ends here.
Electrical engineers use circuit-flow studies to predict the behavior of a power system under such contingencies as lightning strikes that cause short-circuits to occur between transmission lines. Power-flow studies allow system operators to control the transmission system so as to keep line flows within operating limits even if the most important element in the system fails (known as the “N-1 Criterion”). We have introduced the power flow problem simply to aid our understanding of optimal power flow, though, and will not consider such issues as contingency analysis.
Looking forward to the AC optimal power flow problem, our next step is to use the Newton-
Rhapson method to solve nonlinear optimization problems. First, we introduce a generic nonlinear optimization problem. After solving the basic problem, we then add constraints onto it and finally address the optimal power flow problem itself. Since the optimal power flow problem involves cost minimization, we will illustrate the Newton-Rhapson method for a minimization problem. We will work with a strictly convex function, so as to find a unique global minimum and minimizer.
Example 2.3: Minimization of a convex nonlinear function
Using the Newton-Rhapson method, find the minimizers of the function:
∀ x ∈
R
2
, f ( x ) = 0 .
01( x
1
− 1)
4
+ 0 .
01( x
2
− 3)
4
+ ( x
1
− 2)
2
+ ( x
2
− 1)
2
,
The FOSC for a minimum are:
∂f
∂x
1
∂f
∂x
2
= 0 .
04( x
1
)
3
+ 2( x
1
− 2) = 0 ,
= 0 .
04( x
2
)
3
+ 2( x
2
− 1) = 0 .
(2.10)
(2.11)
As the alert reader has already guessed, since this is a minimization problem, the FOCs constitute the set of equations which we wish to set equal to zero. Notice that the value of the iterate, x v
, thus represents the error function. This is a system of nonlinear equations
(a square system, with two variables in two unknowns), which we may solve using the
Newton-Rhapson method. More formally, we have that: g ( x ) = ∇ f ( x ) , where ∇ ( · ) is the gradient function.
(2.12)
44
Applying (2.1): g ( x
1
) = g ( x
0
+ ∆ x
0
) ≈ g ( x
0
) +
∂g
∂x x
0
∆ x
0 to (2.12) yields:
∇ ( f ( x
1
)) = ∇ f ( x
0
+ ∇ x
0
) ≈ ∇ f x
0
+ ∇
2 f ( x
0
)∆ x
0
.
(2.13)
Setting the last term in (2.13) equal to zero, solving for ∆ x , and generalizing to generic step v , the Newton-Rhapson update is:
∆ x v
= − [ ∇
2
( f ( x v
)]
− 1
[ ∇ f ( x v
)] .
(2.14)
Therefore, in setting up the Newton-Rhapson update, we must take the Jacobian of the system of first-derivatives(the Hessian of the original system). Doing so for this example, we obtain:
∇
2 f ( x
0
) =
"
0 .
12( x
1
− 1)
2
+ 2
0
0
0 .
12( x
2
− 3)
2
+ 2
#
.
A sensible initial estimate is [ x
0
]
0
= [2 , 1], as the contribution of the second rhs terms is much larger than that of the first in the error functions, (2.10) and (2.11). Using this estimate, our initial update is:
[∆ x
0
] = −
2 .
12 0
0 2 .
96
− 1
0 .
0
04
− 0
0
.
32
=
− 0 .
0189
0 0 .
0
1081
, and the first iterate is:
( x
0
)
0
= (1 .
981132 , 1 .
108108) .
The error is then (0 .
000042 , − 0 .
054647). Performing another iterate yields:
[∆ x
0
] = −
2 .
1155
0
0
2 .
4295
− 1
0 .
000042
0 − 0 .
0
054647
=
− 0 .
00002
0
0
0 .
022493
.
The second iterate is thus:
[ x
1
]
0
= [1 .
981112 , 1 .
1306] , with associated error [2 · 10
− 8
, 0 .
000114]
0
. We deem this “close enough” for our purposes.
Since the OPF problem is one of constrained minimization of a nonlinear function, we must determine how to incorporate constraints into the Newton-Rhapson method. Though demonstrating this problem based on examination of the null space of the coefficient matrix,
A , is quite intuitive, we will stick with the Lagrange multiplier approach since economists are generally more familiar with it.
45
Example 2.4: Minimization of a convex objective with linear constraints
Let us apply the Newton-Rhapson method to minimize the objective function: f ( x ) = 0 .
01( x
1
− 1)
4
+ 0 .
01( x
2
− 3)
4
+ ( x
1
− 1)
2
+ ( x
2
− 3)
2
− 1 .
8( x
1
− 1)( x
2
− 3) s.t.
x
1
− x
2
= 8 .
We may set up the Lagrangian as:
L = 0 .
01( x
1
− 1)
4
+0 .
01( x
2
− 3)
4
+( x
1
− 1)
2
+( x
2
− 3)
2
− 1 .
8( x
1
− 1)( x
2
− 3)+ λ ( x
1
− x
2
− 8) .
The first-order necessary (and sufficient) conditions for a minimum are:
∂ L
∂x
1
∂ L
∂x
2
∂ L
∂λ
= 0 .
04( x
1
− 1)
3
+ 2( x
1
− 1) − 1 .
8( x
2
− 3) + λ = 0 ,
= 0 .
04( x
2
− 3)
3
+ 2( x
2
− 3) − 1 .
8( x
1
− 1) − λ = 0 ,
= ( x
1
− x
2
− 1 .
8) = 0 .
From (2.7) and (2.14), the Newton-Rhapson update is:
∆ x v
= − [ ∇
2
( f ( x v
)]
− 1
[ ∇ f ( x v
)] , x v +1
= x v
+ ∆ x v
.
(2.15)
(2.16)
(2.17)
Once again the values that the Jacobian and error term take on are determined by the initial estimates for x and λ , and the sequence of iterates generated therefrom. For purposes of illustration, let us choose [ x 0 ]
0
= [5 .
5 − 2 .
5]. Without any intuition regarding the value the Lagrange multiplier will take (other than that it will be non-positive), we set λ
0
= 0.
We may now calculate the components of the Newton-Rhapson update as:
∇L ( x
0
) =
22 .
545
− 25 .
755
,
0 .
000
∆ x 0
1
∆ x
0
2
∆ λ
=
0 .
497
0 .
497
.
− 23 .
852
It might seem obvious, but the addition of the Lagrangian multiplier adds a third component to the system of FONC, yielding a 3 × 3 Jacobian, as opposed to a 2 × 2 matrix.
The errors: ∆ L ( x
1
)
0
= 0 .
138 − 0 .
158 0 indicate that we are in the ballpark of the
46
Since the OPF problem has nonlinear constraints, as opposed to simply linear ones, we move from the Newton-Rhapson method for solving nonlinear problems with linear restrictions to solving nonlinear problems with nonlinear restrictions. Doing so is analytically straightforward, though the presence of nonlinear constraints is problematic because the constraint set is no longer convex. Once a set of nonlinear restrictions is introduced, instead of simply searching for the minimizer of the objective function by moving around the hyperplane in n -dimensional space that corresponds to the affine restrictions, we must adjust our search by tracing out the constraint function as best we can while scoping out a descent direction for the objective function. Formally, we address a problem of the form: min x ∈
R n
{ f ( x ) | g ( x ) = 0 } , (2.18) where f ( · ) : constraints.
R n →
R m
. The problem is non-affine, both in the n variables and the m
For a general physical problem, several functions may approximate the feasible set (electric energy being an exception, since it itself operates according to well-defined mathematical functions). In the case that we do have such choice, however, we will choose a function g ( · ) that satisfies the following definition:
Definition 1: Let g ( · ) : constraints g ( x ) = 0 if:
R n →
R m
. We say that x
∗ is a regular point of the equality
1 . g ( x
∗
) = 0 ,
2 . g ( · ) is partially differentiable with continuous partial derivatives at x
∗
, and
3 .
the m rows of the Jacobian J ( x ) of g ( · ) evaluated at x
∗ are linearly independent.
For g ( · ) to have any regular points, it must be the case that m ≤ n , since otherwise the m rows of J ( x
∗
) cannot be linearly independent. Also, if g ( · ) has a regular point, then we can find an invertible m × m submatrix:
∂g
( x
∗
). This last observation is important, of
∂ω course, because the Newton-Rhapson method uses the inverse of the relevant Jacobian.
Next, we define the tangent plane to the feasible set as follows:
Definition 2: Let g ( · ) : let J ( · ) :
R n →
R m × n
R n →
R m be partially differentiable and let be the Jacobian of g ( · ). Suppose that x
∗ x
∗ ∈
R n
. Further, is a regular point of the constraints g ( x ) = 0 . Then the tangent plane to the set S = { x ∈
R n | g ( x ) = 0 } at the point x
∗ is the set:
T = { x ∈
R n | J ( x
∗
)( x − x
∗
) = 0 } .
1
We leave reiteration of the Newton-Rhapson method as an exercise to the reader.
47
The tangent plane at x
∗ of g ( x ) about x
∗ is 0 is the set of points such that the first-order Taylor approximation
. The alert reader will recognize that the set T corresponds to an affine constraint set with its Jacobian J ( x ) passing through the point x
∗
. A little math
(Baldick (2006 Ch. 13) demonstrates that the set T is the null space of the affine system of constraints Ax = b .
Therefore, if we had an affine system of constraints, we could simply scan the null space of A in search of the minimizer of f ( x ). Since this is not the case, the best we can hope for is to move along the tangent plane T of S , evaluated at the regular point x
∗
. As we move away from x
∗ along T , we will necessarily move out of the feasible set S . Because the tangent plane is generally a better approximation of the constraint set for small values of
( x − x
∗
) = ∆ x
∗
, we will keep our step sizes small to avoid straying far from S . Using this update, we arrive at a new (hopefully) regular point, x
∗∗
, and perform another update.
Having made the first update, however, we will have necessarily moved out of the feasible set. This creates a certain tension in the analysis. At the next update we will at the same time, wish to: (1) move back toward the constraint set, S , and; 2) reduce the value of the objective function. Focusing on the first point, we will have chosen our initial value, x 0 such that g ( x
0
) = 0 . As we have just argued, though, taking a linear approximation to the constraint set in making our initial iterate implies that g ( x
1
) = 0 . Therefore, we will try to make the next update, ∆ x 2 bring us back to the constraint set (i.e., we will try to choose ∆
∆ x
1
= − [ x
J
2
( such that g ( x
2
) = 0 ). Note that the Newton-Rhapson update at x
1 x
1 is simply
)]
− 1 g ( x
1
). This update is consistent with the definition of the tangent plane, above, except that now we are no longer on the constraint set (i.e.
g ( x
1
) = 0 ). Moving on to the second point, we once again will set up the FONC to solve for the minimizer of the objective function. However, since the constraint set is no longer convex, the first-order conditions are no longer sufficient. Formally, the SOSC for a local minimizer are given by the following theorem:
Theorem 1 Suppose that f ( · ) :
R n →
Consider problem (2.18) and points
R x
∗ and
∈
R g n
( · ) : with continuous second partial derivatives. Let J and
R
( · n
λ
→
R m
) :
∈ are twice partially differentiable
R n
R m
→
R m × n be the Jacobian of
. Suppose that: g ( · ) .
∆ f ( x
∗
) + J ( x
∗
)
0
λ
∗
= 0 , g ( x
∗
) = 0 , and
(2.19)
(2.20)
∇
2 f ( x
∗
) + m
X
λ
∗
`
∇
2 g
`
( x
∗
) is positive def inite on the null space :
` =1
N = { ∆ x ∈
R n | J ( x
∗
)∆ x = 0 } .
Then x
∗ is a strict local minimizer of Problem (2.18).
48
Proof See D.G. Luenberger (1984, Section 10.5)
This condition, requiring that the Hessian of the Lagrangian be positive definite, is to be expected, but it is convenient to have it on hand. It also yields a compact representation of the first-order conditions to problem (2.18). That is, the FONC for minimization of the
Lagrangian:
L = f ( x ) + λ ( g ( x ) − 0 ) ,
are given by (2.19) and (2.20).
equations yields:
Applying the Newton-Rhapson method to this system of
" ∇ 2 xx
L ( x v
, λ v
) J ( x v
)
0 # "
∆ x v #
J ( x v
) 0 ∆ λ v
= −
" ∇ f x v
+ J ( x v
)
0
λ v #
.
g ( x v
)
At this point, with the help of fn.
2 the reader should be able to go back to (2.15)
— (2.17) and deduce that the difference between the Newton-Rhapson update for the nonaffine vs. affine constraint set is the replacement of terms of the matrix A
0 of the matrix J ( x v
)
0 and g ( x v
) for 0 by terms as the second-row on the rhs (the latter point arising because we no longer can guarantee that the iterate will stay within S ). Alternatively, we may say that the only difference between the two solution methods is that when we have a nonlinear constraint set, we must use the Newton-Rhapson approximation of the corresponding linear constraint set. Since we are already familiar with this method, adding a nonlinear constraint set imposes no new analytical difficulties.
Having solved for (∆ x v
, ∆ λ v
) using the system of Newton-Rhapson equations, we write the generic Newton-Rhapson update as:
" x v +1 #
λ v +1
=
" x v #
+ α v
λ v
"
∆ x v #
.
∆ λ v
We explicitly include the step size, α v
, because it reminds us of the tradeoff we face between satisfaction of the constraints and improvement in the objective. We may feel it necessary to set α v < 1 should the full Newton-Rhapson update lead us to stray from the constraint g ( x ) = 0 .
The Newton-Rhapson method handles affine- and non-affine equality constraints easily because the method is meant to solve problems of the form g ( x ) = 0 , whether g ( x ) is affine or not. However, incorporating in equality constraints is more problematic for precisely the same reason.
are:
2
At this point, one may verify that the corresponding FOSC for the linear counterpart to this problem
∇ f ( x
∗
) + A
0
λ
∗
= 0 , and Ax
∗
− b = 0 , where A is defined in the latter equation as the coefficient matrix of the linear constraint set.
49
We examine two types of inequality constraints: (1) non-negativity constraints; and (2) feasible operating ranges ( i.e.
feasible production levels). We address the first problem, non-negativity constrained minimization, subject to affine equality constraints. If the objective function is convex in this case, then we have a convex minimization problem. We introduce the FONC for this problem and the familiar Kuhn-Tucker conditions in the following theorem:
Theorem 2 Let f ( · ) :
R n
A ∈
R m × n
, and b ∈
R m
→
R be partially differentiable with continuous partial derivatives,
. Consider the problem, min x ∈
R n
{ f ( x ) | Ax = b , x ≥ 0 } , and a point x
∗
∈
R n
.
If x
∗ is a local minimizer of (2.21), then:
∃ λ
∗
∈
R n such that : ∇ f ( x
∗
) + A
0
λ
∗
− µ = 0 ;
M
∗ x
∗
= 0 ;
A
∗ x
∗
= 0 ; x ≥ 0 ; and
µ ≥ 0 ;
(2.21)
(2.21a) where M
∗
λ
∗ and µ
∗ is a diagonal matrix with diagonal entries equal to µ
∗
`
, ` = 1 , 2 , . . . , n.
The vectors satisfying the conditions (2.21a) are called the vectors of Lagrange multipliers for the constraints Ax = b and x ≥ 0 , respectively. The conditions M
∗ x
∗
= 0 ; are the familiar complementary slackness conditions.
Proof Nash and Sofer (1996, Section 14.4).
To see why the addition of non-negativity constraints is problematic for the Newton-
Rhapson method, consider that the complementary slackness conditions for minimization,
M
∗ x
∗
= 0 , require that for each choice variable, x
`
, either µ
`
= 0 or x
`
= 0( orboth ) ∀ ` =
1 , 2 , . . . , n . To apply the Newton-Rhapson method to this condition, we linearize the equation M
∗ x
∗
= 0 about the values of µ and x at iteration v and use the linearized equations to construct an update. Doing so, we obtain:
µ v +1
` x v +1
`
= ( µ v
`
+ ∆ µ v
`
)( x v
`
+ ∆ µ v
`
) ≈ µ v
` x v
`
+ ∆ µ v
` x v
`
+ µ v
`
∆ x v
`
.
Our goal is to obtain the complementary slackness conditions corresponding to the minimizer, x
∗
. Unfortunately, though, it is entirely possible that we arrive at an iterate for which x v
`
= 0 before we have found the minimizer. If this happens, then by the Newton-
Rhapson method, we have:
µ v +1
` x v +1
`
≈ µ v
` x v
`
+ ∆ µ v
` x v
`
+ µ v
`
∆ x v
`
= µ v
`
∆ x v
`
,
50
(since x v
`
= 0). But the Newton-Rhapson method implies that:
J ( · )∆( · ) = − g ( · ) , and thus:
− µ v
` x v
`
= 0 ⇒ ∆( µ v
` x v
`
) = 0 ⇒ ∆ x v
`
= 0 .
Therefore, once we get to the point where x v
`
= 0 (or µ v
`
= 0, for that matter), we will never move from that point. Successful application of the Newton-Rhapson method in this case requires that we avoid these two outcomes.
Fortunately there is a simple (and rather clever) method for doing just that, called the
Conceptually, the interior point algorithm erects a “barrier” that
(usually) prevents violation of all of the equality constraints, so that x v
, µ v ∈
R n
++
, ∀ v.
To avoid the case where an entry of x or µ is on the boundary of the positive orthant, the barrier function should increase sufficiently rapidly as the objective function approaches the boundary of the feasible region.
To illustrate the interior point algorithm and its associated barrier function, let us consider the following problem: min x ∈
R n
{ f ( x ) s.t.
x ≥ 0 } .
We add a barrier function to the objective function to form the barrier objective :
(2.22)
φ ( x ) = f ( x ) + f b
( x ) .
A suitable barrier function will be differentiable on the interior of the constraint set, but will be unbounded as we approach the set’s boundary. Two such barrier functions are the reciprocal function and the negative of the logarithm function, known as the logarithmic barrier function , the latter of which we will study further. Let us define the logarithmic barrier function f b
( · ) :
R n
++
→
R for the constraints x ≥ 0 by:
∀ x ∈
R n
++
, f b
( x ) = ln x.
At this point, the typical response for an economist is probably a lot of head scratching, because adding a function to the objective that becomes infinite just as the objective is approaching its minimum value makes no sense at all. Fortunately (and this is the point where the approach becomes exceedingly clever), this is not where the methodology terminates. At this juncture, we multiply the barrier function by the barrier parameter , t ≥ 0 , obtaining the revised barrier function: tf b
( x ) = − t ln x,
3
Alternatively, one might use the active set method (see, e.g. Baldick (2006, section 16.3)).
51
and the revised barrier objective:
φ ( x ) = f ( x ) + tf b
( x ) .
Thus, instead of solving (2.22), we will solve the barrier problem : min x ∈
R n
{ φ ( x ) | Ax = b , x ≥ 0 } .
(2.23)
That is, we minimize φ ( x ) over values of x ∈
R n in the interior of x ≥ 0.
that satisfy Ax = b and which are also
Notice that for a fixed value of t , the swift increase in thje value of the barrier as we approach the boundary means that the minimizer of problem (2.23), x
∗
( t ) , ∈
R n
++
. Thus, problem (2.23) will not have a solution unless ∃ x ∈
R n | Ax = b
Notice also that because we wish to avoid iterates that fall outside of
R n
++
to prevent this from happening.
, we must carefully monitor the step size
Since the barrier function distorts the objective function, actually preventing us from finding the optimal value of the decision vector x , the key to the interior point algorithm is that its initial iterate starts at some positive value for t , but then constructs a path of iterates for successive values of the barrier objective as t → 0.
As mentioned above, for a fixed value of t , we minimize the barrier objective, obtaining the minimizer x
∗
( t ). We then run another iterate of the Newton-Rhapson mechanism for a smaller value of the barrier parameter. That is, t y +1
< t y
, where y is the iteration counter for the iterates of t (as opposed to v , the iteration counter for the Newton-Rhapson iterates). At the first run of the interior point algorithm, we are free to set the initial value, x
0
( t
0
). However, for every successive iteration, y > 0, we set the initial value of the vector of choice variables equal to the optimal value(s) for the previous iteration. That is, x
0
( t y +1
) = x
∗
( t y
) .
As the alert reader will already have surmised, the limit of this sequence of iterates is the minimizer, x
∗
, of the objective function, f ( x ). The trajectory of the sequence of minimizers of problem (2.23) is known as the central path (Nash and Sofer (1996, Section 17.4)).
If the sequences of minimizers and Lagrange multipliers associated with problem (2.23)
4
This is known as the Slater condition(see e.g.
Nash and Sofer (1996, p. 485)).
5 Even though we penalize values of the choice variables that fall near the boundary of the feasible set, this alone does not guarantee that we will not step outside of the this set. If the Newton-Rhapson step direction, ∆ x , generated by the Newton-Rhapson method is too large, we might still find ourselves on (or outside) the boundary of the choice set. We stop this from happening by appropriate choice of α v
. Thus, the interior point algorithm is not quite as foolproof as one might initially imagine.
52
converge, then the limits of these sequences satisfy the FONC for problem (2.22).
Provided that we have successfully implemented the barrier function, so that the central path falls strictly within
R n
++
, we may (partially) ignore the inequality constraints and the domain of the barrier function. That is, computationally, we may examine the problem: min x ∈
R n
{ φ ( x ) | Ax = b } .
(2.24)
Thus, we have effectively reduced the problem of non-negatively constrained minimization, subject to equality constraints, to equality-constrained minimization alone. So long as f ( · ) and f b
( · ) are convex, we may write the FOSC for minimization of (2.24) as:
∇ φ ( x ) − A
0
λ = 0 , b − Ax = 0 .
(2.25)
(2.26)
These are a set of nonlinear simultaneous equations which we will once again solve using the Newton-Rhapson method.
To use the Newton-Rhapson method to solve (2.24), write the barrier objective function in terms of its separate components:
φ ( x ) = f ( x ) + tf b
( x ) .
Therefore, the first term in (2.25) is:
∇ φ ( x ) = ∇ f ( x ) + t ∇ f b
( x ) .
Writing (2.27) in terms of the logarithmic barrier function yields:
(2.27)
∇ φ ( x ) = ∇ f ( x ) + t ∇ ( − ln x )
= ∇ f ( x ) + t
−
1 x
1
.
..
−
1 x n
= ∇ f ( x ) − t X
− 1
1 ,
6
As Baldick (2006, problem 16.20) demonstrates, it is difficult to solve (2.23) directly for a very small value of t , because a badly chosen initial estimate leads to a poor update of the algorithm. Baldick (2006, p. 638) also notes that, in problems with more than one variable, if the initial estimate that is far from the minimizer of (2.23) for the current value of the barrier parameter t , then the coefficient matrix to determine the step-direction may be ill-conditioned. Thus, we are well-advised to start with a fairly large value of t and work toward the minimizer of (2.22) using the central path generated from (2.23), instead of “cheating” by starting with a small value for t .
53
where X = diag { x
`
} ∈
R n × n is a diagonal matrix with entries equal to x
`
, ` = 1 , · · · , n.
The NewtonRhapson update for this problem is expressed by the familiar equations:
∇ 2
φ ( x v
A
) − A
0
0
∆ x v
∆ λ v
=
∇ φ ( x v
) + A
0
Ax v
− b
λ v
.
Decomposing the barrier function, this system becomes:
∇ 2 f ( x v ) + t X v
A
− 2
− A
0
0 ∆ x
∆ λ v v
=
∇ f ( x v ) + t X v
Ax v
− 1
− b
1 + A
0
λ v
.
(2.28)
Updates of this family are known as the primal interior point algorithm .
As we move along here, implementation of the Newton-Rhapson method becomes increasingly complicated. The primal interior point algorithm does not simply involve finding a single vector of minimizers, but rather successive rounds of them. This emphasizes the indispensability of computer programming in successfully addressing any but the simplest of problems using this algorithm. Nevertheless, it is instructive to work out an example using this method.
Example 2.5: Primal interior point algorithm
Consider the following problem: min x ∈
R
2
( x
1
)
2
− ( x
2
)
2 x
1
+ x
2
= 1 , x
1
≥ 0 x
2
≥ 0 .
To implement the primal interior point algorithm with a negative logarithmic penalty function, we set up the augmented Lagrangian as follows:
L = ( x
1
)
2 − ( x
2
)
2 − t ln x
1
− t ln x
2
+ λ (1 − x
1
− x
2
) .
To demonstrate the algorithm effectively, we want to avoid too big of a step size. We will set t =1. Having done so (and cheating a little bit), setting x
0
0
= [0 .
275 0 .
7125 − 2 .
825] will avoid a large step. To solve for the step zero Newton-Rhapson update, we must solve for the FOC for a minimum and the Hessian of the Jacobian, which we show below:
∂ L
∂x
1 t
= 2 x
1
− x
1
− λ = 0 ,
∂ L
∂x
2
∂ L
∂λ
= − 2 x
2 t
− x
2
− λ = 0 ,
= 1 − x
1
− x
2
= 0 , and
54
H =
2 + t
( x
1
) 2
0
− 1
0
− 2 + t
( x
2
) 2
− 1
− 1
− 1
.
0
Notice that (2.29) and the first rhs term in (2.28) are, in fact, equivalent, since:
∇
2 f ( x v
) + t X v
− 2
=
2 +
t
( x
1
) 2
0
0
t
− 2 +
( x
2
) 2
, and:
A = − 1 − 1 .
(2.29)
Notice also that the lhs of (2.28) is simply the system of FOCs (with the exception that the zeros are explicit in the FOCs, whereas they are implicit in the lhs terms of (2.28)
(because we want g ( x v
) = 0 , so the lhs of (2.28) is − ∆ g ( x v
) = − g ( x v
) − 0 , but the zero vector is implicit).
The Newton-Rhapson step-zero step direction is thus derived from the solution of:
2 + t
( x
1
) 2
0
− 1
0
− 2 + t
( x
2
) 2
− 1
− 1
− 1
0
∆ x
0
1
∆ x
0
2
∆ λ
0
= −
2 x
− 2 x
0
1 t
− x t
0
1
0
2
− x
1 − x
0
2
0
1
− λ 0
− λ
0
− x
0
2
(2.30)
Substituting in the initial values for x
1
, x
2
, and λ , we find:
∆ x
0
1
∆ x
0
2
∆ λ
0
=
0 .
005314
− 0 .
005314
,
− 0 .
003349 and therefore,
x
1
1
x
1
2
λ
1
=
0 .
2928
0 .
7072
− 2 .
8280
,
55
with associated errors: g
x
1
1
x
1
2
λ
1
=
− 0 .
00170
− 0 .
00043
.
0 .
00000
For our purposes, these errors are sufficiently small that we may move on to the subsequent step in the algorithm. Next, we iterate on the barrier parameter, t . Doing so, we decrease t from 1 to 0.9 (and to 0.8 in the next run, and so on). As mentioned above, we use the optimal values, x
1 ∗
, found for t = 1 for the initial estimates for x
1
, x
2
, and λ . The augmented Lagrangian is again:
L = ( x
1
)
2 − ( x
2
)
2 − t ln x
1
− t ln x
2
+ λ (1 − x
1
− x
2
) , so that the Newton-Rhapson update is of exactly the same form (as one would expect), but this time with the reduced value of t .
So, inserting the value [ x
1
1 x
1
2
λ
1
]
0
= [0 .
2928 0 .
7072 − 2 .
8280] , t = 0 .
9 into (2.30). gives:
∆ x
2
1
∆ x
2
2
∆ λ
2
=
− 0 .
0162
0 .
0162
,
0 .
1377
x
2
1
x
2
2
x
2
3
=
0 .
2766 x
2
1
−
0 .
7234
, and g
2 .
6903
x
2
2
λ
2
=
− 0 .
0103
− 0 .
0006
0 .
0000
(2.31)
Assuming a tolerance of 0.005 for the error term, we would reiterate with t = 0 .
9 before ratcheting t down to 0.8 (assuming, of course, we reach the desired tolerance in the next iteration).
As we would expect, after we decrease the barrier parameter, the values for x
1 and x
2 move closer to the true minimizers ( x
∗
1
, x
∗
2
) = (0 , 1) .
The central path will converge to this value as t → 0.
Having introduced the primal interior point algorithm, we are ready to move on to a variant of this algorithm that includes explicit consideration of non-negativity constraints, called the primal-dual interior point algorithm . If the primal interior point algorithm is clever, the primal-dual interior point algorithm is truly inspired. The algorithm focuses on the handling of the complementary slackness conditions for non-negatively constrained minimization:
µ
` x
`
= 0 µ
`
≥ 0 , x
`
≥ 0; ∀ ` = 1 , 2 , · · · , n, where n
is the number of non-negatively constrained variables.
9
The following discussion is based on Baldick (2006, Section 16.4.3.3).
56
As argued above, one cannot incorporate the complementary slackness conditions directly into the Newton-Rhapson algorithm, because the ordered pairs ( x
`
, µ
`
) that satisfy these conditions lie either on the x axis, the µ axis, or at the origin; and linearization of the complimentary slackness conditions implies that once a variable hits the axis, it stays there.
But when we replace the conventional complementary slackness condition with a revised condition:
µ
` x
`
= t, ∀ ` = 1 , 2 , . . . , n, (2.32) the following hold:
1. The complementary slackness condition no longer brings us to either the x or µ axis;
2. Linearization of (2.32), together with an explicit requirement to avoid the x and µ axes, yields a useful update that can approximate the kink in the complementary slackness conditions;
3. Solving for µ
`
= t/x
` will come in handy in the FOCs; and
4. As t → 0, the modified complementary slackness conditions approach the complementary slackness conditions for minimization of the objective function.
That is, as t is reduced, the hyperbolic-shaped sets corresponding to the modified complementary slackness conditions come closer to the set of points satisfying the complementary slackness conditions and the non-negativity constraints.
Point 3 suggests use the logarithmic barrier function with barrier parameter t : t ( − ln x ).
We may set up the barrier problem for non-negatively constrained minimization with linear constraints as: min x ∈
R n
L = f ( x ) + t ( − ln x ) + λ ( b − Ax ) .
The FONC for a minimum are:
∂ L
∂ x
∂ L
∂ λ
= ∇ f ( x ) − t [ X ]
− 1
− A
0
λ = 0 ,
= b − Ax = 0 .
From point 3, we may re-write (2.34) as:
∆ f ( x ) − A
0
λ − µ = 0
(2.33)
(2.34)
(2.35)
Next, we use the Newton-Rhapson method to find a step direction to solve the comple-
57
mentary slackness condition and the two first-order conditions, (2.34) and (2.35): t 1 − X µ = 0 ,
∇ f ( x ) − A
0
λ − µ = 0 ,
Ax = b .
By inspection, the Newton-Rhapson step direction is:
X v − M v
0
∆ µ v
− I ∇ 2 f ( x v
) − A
0
0 − A 0
∆ x v
∆ λ v
=
X v
µ v − t 1
−∇ f ( x v
) +
Ax v
A
−
0
λ b v
+ µ v
, where M v
= diag { µ v
`
} , and X v
= diag { x v
`
}
. The Newton-Rhapson update is:
µ v +1
x v +1
λ v +1
=
µ v
x v
λ v
+
∆ µ v
∆ x v
∆ λ v
.
Note that iterating until we approach a minimizer, x t
∗
0 , corresponding to a fixed value of t = t
0 would be very computationally expensive, as we continue this process for smaller and smaller values of t . Therefore, instead of doing so, a more conventional method is to reduce t slightly at every iteration of the process. Reducing t excessively yields a poor update direction because the step-size to maintain non-negativity of the iterates will be very small (See Baldick (2006, Exercise 16.22).
As before, we will find the optimal vector of choice variables, x
∗ as the limit of the central path as t approaches zero, provided that the problem is well-behaved.
Example 2.6: Primal-dual interior point algorithm
Consider again the problem from Example 2.5: min x ∈
R
2
( x
1
)
2
− ( x
2
)
2
| x
1
+ x
2
= 1 , x
1
≥ 0 x
2
≥ 0 .
We write the augmented Lagrangian for problem (2.65) corresponding to the primal-dual interior point algorithm as:
L = ( x
1
)
2
− ( x
2
)
2
− t ln x
1
− t ln x
2
+ λ (1 − x
1
− x
2
) .
11
Because the full Newton-Rhapson update may take us outside the bounds of the feasible region, we will modify the update according to the step size, α v , as necessary. For further discussion of the step-size for the primal-dual problem, see Baldick (2006, pp. 643-645).
58
The FOSC for a minimum are:
∂ L
∂x
1 t
= 2 x
1
− x
1
− λ = 0 ,
∂ L
∂x
2
∂ L
∂λ
= − 2 x
2 t
− x
2
− λ
= 1 − x
1
− x
2
= 0 ,
= 0 , with associated complementary slackness conditions: t − x
1
µ
1
= 0 , t − x
2
µ
2
= 0 .
The Newton-Rhapson update is given by the solution of the following system of equations:
x
1
0 µ
1
0 0 ∆ µ
1
0
− 1
0 − x
0
1
2
0
0
2
µ
2
0
0 − 1
∆ µ
2
∆ x
1
0 − 2 − 1
∆ x
2
0 − 1 − 1 0 ∆ λ
t − x
1
µ
1
= −
2 x t
1
−
− 2 x
2
− x
−
2
λ
µ
λ
2
−
−
µ
µ
.
1 − x
1
− x
2
(2.36)
Even for a simple problem, the Newton-Rhapson method is already getting out of hand
(which is why for any problem worth solving, one writes code and lets the computer do the rest of the work). Nevertheless, we will demonstrate the first iteration of this process.
Using the same barrier parameter, t = 1, we will use the revised values, x
1
1
, x
1
2
, and λ
1 found in (2.31) for the first run of the primal interior point algorithm. With x
1 and x
2 determining the values for µ
1 and µ
2
, the initial vector is:
µ
0
1
µ 0
2
x
0
1
x
0
2
λ
0
=
3 .
6153
1 .
3824
0 .
2766
0 .
7234
− 2 .
6903
12 It does seem strange that we lose the t/x
2
643) the expected term reappears.
term in the Hessian, but if you look at Baldick (2006, p.
59
Inserting these values into eq.(2.36), the stage zero update is:
µ
1
1
µ 1
2
x
1
1
x
1
2
λ 1
=
3 .
6153
1 .
3824
0 .
2766
0 .
7234
− 2 .
6903
+
− 0 .
2033
0 .
0297
0 .
0156
− 0 .
0156
− 0 .
1375
=
3 .
4120
1 .
4121
0 .
2922
.
0 .
7078
− 2 .
8278 .
As one might expect, the method for solving inequality constrained optimization problems is quite similar to that for solving non-negatively constrained optimization problems, using a barrier parameter to bound the iterates away from the constraint. The difference is that we use the familiar method of slack variables (along with complementary slackness conditions) in solving the problem. Formally, we consider the following problem: min x ∈
R n
{ f ( x ) | Ax = b , Cx ≤ d } , (2.37) where A ∈
R m × n
, b ∈
R m
, C ∈
R r × n
, and d ∈
R r are constants. The feasible set defined by the linear equality and inequality constraints is convex (see Baldick (2006, Exercise
2.36)). Thus, if f ( · ) is convex on the feasible set, the problem is convex. We introduce the
FONC for this problem in the following theorem:
Theorem 3 Let f :
R n
A ∈
R m × n
, b ∈
R m
, C ∈
→
R n
R r × n be partially differentiable with continuous partial derivatives,
, and d ∈
R r
.
Consider problem (2.37) min x ∈
R n
{ f ( x ) | Ax = b , Cx ≤ d } , and a point x
∗ ∈
R n
If x
∗ is a local minimizer of (2.37) then:
∃ λ
∗
∈
R m
, ∃ µ
∗
∈
R n such that : ∇ f ( x
∗
) + A
0
λ
∗
− C
0
µ
∗
= 0 ;
M
∗
( Cx
∗
− d ) = 0 ;
Ax
∗
Cx
∗
µ
∗
=
≤
≥ b d
0 ,
;
; and where M
∗
= diag { µ
∗
`
} ∈
R r × r
.
The vectors x ∗ and µ
∗ satisfying the above conditions are called the vectors of Lagrange multipliers for the constraints Ax = b and Cx ≤ d , respectively. The conditions M
∗
( Cx
∗
− d ) = 0 are the complementary slackness conditions.
Proof Nash and Sofer (1996, Section 14.4). Again, the FOCs are sufficient provided that the objective is convex on the feasible set.
60
Introducing the slack variable, w ∈
R r
, we transform the inequality constraint Cx ≤ d into the equivalent equality constraint: Cx + w = d . Upon making this substitution, (2.37) becomes: x ∈ min
R n
, w ∈
R r
{ f ( x ) | Ax = b , Cx + w = d , w ≥ 0 } , transforming the inequality constrained problem into a non-negatively constrained problem. This formulation suggests a method for solving the inequality constrained problem analogous to that of solving the non-negatively constrained optimization problem: introduce a barrier function into the objective function and then minimize the barrier objective function. We form the barrier objective function φ ( · ) :
R n ×
R r
++
→
R as:
φ ( x , w ) = f ( x ) + tf b
( w ) , ∀ x ∈
R n
, ∀ w ∈
R r
++
.
Note that the barrier function does not apply to x here, unless x is non-negatively constrained as well.
We must assume that the Slater condition holds in order to solve this problem using an interior point algorithm. We again specify a logarithmic barrier function, so that: f b
( w ) = r
X ln w
`
,
` =1
∇ f b
( w ) = − [ W ]
− 1
1 ,
∀ w ∈
R r
++
, where W = diag { w
`
} ∈
R r × r is a diagonal matrix with diagonal entries equal to w
`
, ∀ ` = 1 , 2 , . . . , r.
Setting up the Lagrangian for this general problem, we have:
L = f ( x ) + t ( − ln w ) + λ ( b − Ax ) + µ ( d − Cx − w ) .
(2.38)
Since this problem is quite similar to problem (2.37) we will not explicitly work out an example, but rather simply set up the general FONC for problem (2.38) and the Newton-
Rhapson step direction, as follows: FONC:
∇ f ( x ) − A
0
λ − C
0
µ = 0 ,
Ax = b ,
Cx + w = d , t ∇ f b
( w ) + µ = 0 .
(2.39)
(2.40)
(2.41)
(2.42)
The Newton-Rhapson step direction is given as the solution to:
M v
0 0
0 ∇ 2 f ( x v
) A
0
0
I
A
C
0
0
W
C
0
0
0 v ∆ µ v
∆ x v
∆ λ v
∆ µ v
W v
µ v − t 1
= −
∇ f ( x v
b − Ax v
) − A
0
λ v d − Cx v
− w
− v
µ v
.
(2.43)
61
Again, decreasing the barrier parameter yields the central path, and the limit of the central path, as the barrier parameter approaches zero yields the solution to the inequality constrained problem. One special case of inequality constrained minimization is when C = I r
, the identity matrix of order r . This is the case when there exist non-zero upper and/or lower limits on a choice variable. In the case of a power flow problem, these constraints take the form of: (1) limits on flows of energy across power lines, and; (2) minimum and maximum run constraints on generators, both with respect to voltage and power.
Fortunately, we may approach this problem using the tools already in place. Let ¯ denote vector of maximum values that the variables x may take. We transform the inequality constraint x ≤ ¯ into an equality constraint using the slack variable approach, as follows: x + w = ¯ , w ≥ 0 .
From there, the method proceeds in the same manner as the general solution method for inequality constrained minimization (i.e., set up problem (2.38), derive FONC (2.39) — (2.42), and set up the Newton-Rhapson step direction (2.43), etc.).
We present an example of this type of inequality-constrained minimization below, for the interested reader.
Example 2.7: Inequality-constrained minimization Consider the following problem: min x ∈
R
2
( x
1
− 1)
2 − ( x
2
− 3)
2 | x
1
− x
2
= 0 , x
2
≤ 1 .
5 .
Perform one iteration of the primal-dual interior point algorithm, using as the initial estimate:
µ
0
= 1 , x
0
1
= 1 , x
0
2
= 1 , w
0
= 0 .
5 , λ
0
= 0 , t
0
= 0 .
5 .
First, we set up the Lagrangian
L = ( x
1
− 1)
2
+ ( x
2
− 3)
2
+ t ( − ln w ) + λ ( x
1
− x
2
) + µ ( x
2
+ w − 1 .
5) .
The FONC are:
∂ L
∂w
∂ L
=
− t
+ µ = 0 , w
∂x
1
= 2( x
1
− 1) + λ = 0 ,
∂ L
∂x
2
∂ L
= 2( x
2
− 3) − λ + µ = 0 ,
= x
1
− x
2
= 0 , and
∂λ
∂ L
= x
2
+ w − 1 .
5 = 0 .
∂µ
62
The stage zero Newton-Rhapson update to the barrier problem is thus given by the solution to the following system of equations:
µ
0
0
0
1
0
0 0 0 w
0
∆ w
0
2
0
1
0
−
0
2
1
1
−
1
1
0
0
0
1
0
0
∆ x 0
1
∆ x
0
2
∆ λ
0
∆ µ
0
=
− w
0
µ
0
+ t
− 2( x 0
1
− 2( x
0
2
−
− 1)
3) +
−
λ
0
λ
−
0
µ
0
.
− x
0
2
− x
0
1
−
+ w
0 x
0
2
+ 1 .
5
We then have: w
1
= 0 , x
1
1
= 1 .
5 , x
1
2
= 1 .
5 , λ
1
= − 1 , µ
1
= 2 .
Note that we have reached the minimizers of the problem after only one repetition of the algorithm, and that the minimizers occur at the boundary for x
2
. So, even though the interior point mechanism is supposed to keep us away from the border, it does not, but it does give us the right answer anyway.
At this point, we are just about ready to attack AC OPF. The one additional complication that we face in addressing this problem is that of incorporating nonlinear constraints into the primal-dual algorithm. That is to say, we replace the linear inequality constraints
{ Ax = b , Cx ≤ d } with the nonlinear constraint sets { g ( x ) = 0 , h ( x ) ≤ 0 } to consider the nonlinear inequality-constrained minimization problem: min x ∈
R n f ( x | g ( x ) = 0 , h ( x ) ≤ 0 .
(2.44)
As we previously remarked, however, introducing nonlinear constraint sets means the minimization problem is no longer convex. We deal with this problem by choosing functional forms that yield regular points of the constraints g ( x ) = 0 and h ( x ) ≤ 0 .
At a regular point of the inequality constraints, linearization of the equality constraints and of the binding inequality constraints will once again yield a useful approximation to the feasible set or its boundary, at least in the vicinity of the regular point.
We state the FONC for minimization of the nonlinear inequality constrained problem as follows:
Theorem 4 Suppose that the functions f ( · ) :
R n →
R
, g ( · ) :
R n →
R m
, and h ( · ) :
R n →
R r
R n × m are partially differentiable with continuous partial derivatives. Let J ( · ) :
R n and K ( · ) :
R n →
R n × m be the Jacobians of g and h
→
, respectively. Consider Problem
(2.44): min x ∈
R n f ( x | g ( x ) = 0 , h ( x ) ≤ 0 .
63
Suppose that x ∈
R n is a regular point of the constraints a local minimizer of Problem (2.44), then: g ( x ) = 0 and h ( x ) ≤ 0 .
If x
∗ is
∃ λ
∗
∈
R m
, ∃ µ
∗
∈
R n such that : ∇ f ( x
∗
) + J x
0
λ
∗
+ K x
∗0
µ
∗
= 0 ;
M
∗ h ( x
∗
) = 0 ; g ( x
∗
) = 0 ; h ( x
∗
) ≤ 0 ; and
µ
∗
≥ 0 .
We again transform the inequality-constrained problem into an equality-constrained problem using slack variables, as follows: x ∈ min
R n , w ∈
R r f ( x ) | g ( x ) = 0 , h ( x ) + w = 0 , w ≥ 0 (2.45)
We once again add a barrier function f b
( w ) :
R n
++
→ to transform problem (2.45) into the barrier problem:
R and a barrier parameter t ∈
R + x ∈ min
R n , w ∈
R r
φ ( x , w ) | g ( x ) = 0 , h ( x ) + w = 0 , w ≥ 0 .
In review, we minimize φ ( x , w ) over values of x ∈
R n and w ∈
R r that satisfy g ( x ) = 0 and h ( x ) + w = 0 , and are in the interior of w ≥ 0 .
In order to address this problem, we again must assume that the Slater condition holds. As before, we partially ignore the inequality constraints and the domain of the barrier function and solve the following nonlinear equality-constrained problem: x ∈ min
R n , w ∈
R r
φ ( x , w ) | g ( x ) = 0 , h ( x ) + w = 0 , which has first-order necessary conditions:
∇ f ( x
∗
) + J x
0
λ
∗
+ K x
∗0
µ
∗
= 0 ; g ( x
∗
) = 0 ; h ( x
∗
) + w = 0 ; and t ∇ f b
( w ) + µ = 0 .
and complementary slackness condition:
M
∗ h ( x
∗
) = 0 ; where J ( · ) and K ( · ) are the Jacobians of g ( · ) and h ( · ), respectively, and λ and µ are the Lagrange multipliers corresponding to the constraints g ( x ) = 0 and h ( x ) + w = 0 , respectively.
64
2.2
AC Optimal Power Flow
Conceptually, the AC OPF problem is straightforward. We wish to minimize the cost of
producing a given amount of electricity 13
subject to the power flow equality constraints, generator operating constraints ( i.e.
, minimum and maximum power output),
voltage and transmission-line capacity constraints. We express this general problem as: min x ∈
R n f ( x , w ) | g ( x ) = 0 , x ≤ x ≤ ¯ , h ≤ h ( x ) ≤ , (2.46) where: f ( x ) :
R n
+
→
R +
.
The objective, f ( x
), thus represents the cost of generating (real) power.
Note that f ( · ) is separable, since the decisions of one generation owner typically do not affect the costs of any other generation owner. The equality constraint system, g ( x ), corresponds to Kirchhoff’s current law, applied to each node in the system. The inequality constraint system, x ≤ x ≤ ¯ corresponds to generation constraints. Generators have lower and upper operating bounds on real power output and the range of voltages (generally measured in per unit quantities) at which they may be operated. Finally, the inequality constraint system, h ≤ h ( x ) ≤ ¯
, corresponds to transmission line constraints. The function, h ( x ), represents the fact that flows of power on different transmission lines are functions of the power transfer distribution factors for generators at each node of the system.
With respect to the objective function, Stoft (2002) notes that simplified diagrams of generation supply curves typically assume a constant marginal cost up to the point of maximum generation. This produces jump discontinuities in the market supply curve as we move
from one generators marginal cost to the next.
Stoft argues that one may “smooth” these point discontinuities by assuming that supply curves have extremely large, but finite, slopes when we move from one generator to another, corresponding to a generator’s emergency operating region. This assumption allows us to assume a twice-continuously differentiable market supply function.
13
Where “given amount” is understood to encompass location-specific electricity demand.
“Given amount” may also be interpreted as “optimal amount,” if we assume price-responsive demand.
14 We will not examine minimum output constraints (“minimum run constraints”), other than to assume that a generator’s output cannot be negative.
15 Which we leave to the operations research analysts.
16
Since we are examining the AC power problem, we will bring reactive power back into the discussion.
However, the total cost of power generation generally depends only on the entries of x corresponding to real power generation. See Baldick (2006, p. 595). In some formulations, f ( · ) will also depend on reactive power generations.
17 See Stoft (2002, Chapter 1-6).
65
As for the constraint system, g ( x ) = 0 , Kirchhoff’s current law implies that the net flow of power away from a given node, P
`
, is equal to the net sum of the flows on all lines connected to that node, as given by the power flow eqs. (1A.14) and (1A.15), which we repeat below:
P
`
= u
2
`
G
``
X k ∈
J
( ` ) u
` u k
[ G
`k cos( θ
`
− θ k
) + B
`k sin( θ
`
− θ k
)] ,
Q
`
= − u
2
`
B
``
X k ∈
J
( ` ) u
` u k
[ G
`k sin( θ
`
− θ k
) − B
`k cos( θ
`
− θ k
)] .
Since we are working with AC power we do not linearize these equations, but take them into account as non-linear constraints that must be satisfied in our analysis.
We now move on to the equations for real and reactive power flow on line `k — (1A.12) and (1A.13): p
`k q
`k
= ( µ
`
)
2
G
``
+ u
` u k
[ G
`k cos( θ
`
− θ k
) + B
`k sin( θ
`
− θ k
)] ,
= − ( µ
`
)
2
B
``
+ u
` u k
[ G
`k sin( θ
`
− θ k
) − B
`k cos( θ
`
− θ k
)] .
In the usual case that there is a real power flow limit, ± ¯
`k
, on all lines in the transmission system, we express these constraints as − ¯
`k
≤ ˜
`k
≤ ¯
`k
, ∀ k ∈
J `
As mentioned above, this is the constraint system h ≤ h ( x ) ≤ ¯
.
Note that the objective function will typically be convex, but because (1A.14) and (1A.15) are nonaffine in x , we will generally not have a convex choice set. As Baldick (2006, pp. 599-601) demonstrates, however, it can be shown that the feasible set defined by the constraints p
`
( x ) ≤ 0 and q
`
( x ) ≤ 0 is convex under the assumption that all voltage magnitudes are constant, provided that | θ
`
− θ k
| ≤ 0 .
As one might readily guess, this problem gets complicated really quickly as one examines larger test networks. Therefore, in practically every AC OPF paper you might read, the authors simply present the classical AC OPF formulation, write the Lagrangian of the problem, present first-order conditions, and solve the problem using various computer algorithms. To keep the problem manageable, we will use a three-node model. Additionally,
18 Some transmission lines have different flow limits for opposite directional flows, a fact that we will ingore in our analysis.
19
As Baldick (2006) notes, stating that p
`
( x ) ≤ 0 and q
`
( x ) ≤ 0 is equivalent to assuming that power can be “thrown away,” and can be justified by the observation that as long as a generator is not at its minimum operating range, equality can be reestablished by lowering the output of the generator in question. Since we are presenting the AC problem only to make the linearized AC problem easier to understand, we will not go into the proof of this proposition.
66
we will add as few constraints as possible while preserving the flavor of the power flow problem.
Example 2.8: 3-node optimal power flow problem.
Let us examine the three-node network shown below:
P g 1 u
1
= ?
= 1 .
0
θ
1
= 0 .
0
1 3 P d 3 u
3
= 0 .
6
= 1 .
0
θ
3
= 0 .
0
P g 2
= ?
u
2
= ?
θ
2
= ?
2
Figure 2: The 3-Node Network
Even with just a three-node network, if we include reactive power in the calculations, the problem gets unwieldy, so we focus on real power alone. The transmission line characteristics are given in Table 2.1 below:
Table 2.1: Transmission Line Characteristics
Line Impedance Admittance Real Power Flow Limit
1 − 2 0+j0.001
1
2
−
−
3
3
0+j0.002
0+j0.001
-j1,000
-j500
-j1,000
− 0 .
3 ≤ p
12
≤ 0 .
3
− 0 .
3 ≤ p
13
≤ 0 .
3
− 0 .
4 ≤ p
23
≤ 0 .
4
Again, just to keep the problem manageable, we will assume away voltage constraints at nodes 2 and 3, as well as generator operating constraints.
We assume that there are two generators, located at nodes 1 and 2, and let their cost of
67
real-power production be given by: f
1
( P
1
) = P
1
+ 0 .
2( P
1
)
2
, f
2
( P
2
) = 1 .
1 P
2
+ 0 .
1( P
2
)
2
, respectively, where P i
, i = 1 , 2 is real power generation.
We set up the augmented Lagrangian for the OPF problem, using a logarithmic barrier function with barrier parameter t = 1 .
0, and perform one run of the Newton-Rhapson algorithm using initial estimates:
P
0
1
= 0 .
3 , P
2
0
= 0 .
3 , , u
0
2
= 1 .
0 , θ
0
2
= 0 .
0 , u
0
3
= 0 .
0
Returning to (2.46), first focus on the constraints, g ( x ) = 0 , and h ≤ h ( x ) ≤
¯
. The first constraint corresponds to KCL. This law must hold at all three buses of the network, but since we have only two degrees of freedom, we will express KCL at nodes 2 and 3 only, with node 1 current flow determined residually. Ignoring shunt elements, KCL applied to nodes 2 and 3 yields:
P
2
= u
2 u
1
[ G
21 cos( θ
2
− θ
1
) + B
21 sin( θ
2
− θ
1
)]
+ u
2 u
3
[ G
23 cos( θ
2
− θ
3
) + B
23 sin( θ
2
− θ
3
)] + ( u
2
)
2
G
22
,
P
3
= u
3 u
1
[ G
31 cos( θ
3
− θ
1
) + B
31 sin( θ
3
− θ
1
)]
+ u
3 u
2
[ G
32 cos( θ
3
− θ
2
) + B
32 sin( θ
3
− θ
2
)] + ( u
3
)
2
G
33
, respectively. Substituting the assumed values for u
1
, G ij
, B ij
, and θ
1 yields:
P
2
= u
2
[1 , 000 sin θ
2
] + u
2 u
3
[1 , 000 sin( θ
2
− θ
3
)] ,
P
3
= u
3
[500 sin θ
3
] + u
2 u
3
[1 , 000 sin( θ
2
− θ
3
)] .
OK. So far, so good. Moving on to the transmission line constraints, notice that there are three lines with upper and lower bounds on real power flow, for a total of six constraints.
Taking the general formula for real power flow across line `k : p
`k
= ( µ
`
)
2
G
``
+ u
` u k
[ G
`k cos( θ
`
− θ k
) + B
`k sin( θ
`
− θ k
)] and inserting the parameters corresponding to the three lines yields: p
12
= µ
2
[1 , 000 sin( − θ
2
˜
13
= µ
3
[500 sin( − θ
3
)] ,
)] ,
˜
23
= µ
2
µ
3
[1 , 000 sin( θ
2
− θ
3
)] .
(2.47)
(2.48)
(2.49)
Since power is being withdrawn at node 3, power will flow along lines 13 and 23 towards node 3, as reflected in (2.48) and (2.49), respectively. Because the impedance of line 13 is
68
greater than that of line 23, our initial estimate is that the net power flow on line 12 will be from node 1 towards node 2, as reflected in eq.(2.47). We rewrite the line constraints shown in Table 1 as:
− 0 .
3 ≤ u
2
[1 , 000 sin( − θ
2
)] ,
− 0 .
3 ≤ µ
3
[500 sin( − θ
3
)] ,
− 0 .
4 ≤ µ
2
µ
3
[1 , 000 sin( θ
2
− θ
3
)] , u
2
[1 , 000 sin( − θ
2
)] ≤ 0 .
3,
µ
3
[500 sin( − θ
3
)] ≤ 0 .
3,
µ
2
µ
3
[1 , 000 sin( θ
2
− θ
3
)] ≤ 0 .
4 .
We may now express the AC optimal power flow problem as: min
P
1
,P
2
: P
1
+ 0 .
2( P
1
)
2
+ 1 .
1 P
2
+ 0 + ( P
2
)
2
, s.t.
u
2
[1 , 000 sin( θ
2
)] + u
2 u
3
[1 , 000 sin( θ
2
− θ
3
)] − P
2
= 0 u
3
[1 , 000 sin( θ
3
)] + u
2 u
3
[1 , 000 sin( θ
3
− θ
2
)] + 0 .
6 = 0 ,
0 .
6 − P
1
− P
2
= 0 , u
2
[1 , 000 sin( − θ
2
)] ≥ − 0 .
3 , u
2
[1 , 000 sin( − θ
2
)] ≤ 0 .
3 , u
3
[500 sin( − θ
3
)] ≥ − 0 .
3 , u
3
[500 sin( − θ
3
)] ≤ 0 .
3 , u
2 u
3
[1 , 000 sin( θ
2
− θ
3
)] ≥ − 0 .
4 , and u
2 u
3
[1 , 000 sin( θ
2
− θ
3
)] ≤ 0 .
4 .
,
Note that each of these six equations will have an associated slack variable, turning the inequality- into an equality constraint. Also, the since we want the slack variable to be bounded away from zero, we will attach a barrier function to the it. This motivates the augmented Lagrangian:
L = P
1
+ 0 .
2( P
1
)
2
+ 1 .
1 P
2
+ 0 .
1( P
2
)
2
+ t ( − ln P
1
) + t ( − ln P
2
) + t ( − ln w
1
) + t ( − ln w
2
)
+ t ( − ln w
3
) + t ( − ln w
4
) + t ( − ln w
5
) + t ( − ln w
6
)
+ λ
1
(0 .
6 − P
1
− P
2
) + λ
2 u
2
[1 , 000 sin( θ
2
)] + u
2 u
3
[1 , 000 sin( θ
2
− θ
3
)] − P
2
+ λ
3 u
3
[1 , 000 sin( θ
3
)] + u
2 u
3
[1 , 000 sin( θ
3
− θ
2
)] + 0 .
6
+ λ
4 u
2
[1 , 000 sin( − θ
2
)] − w
1
+ 0 .
3 + λ
5 u
2
[1 , 000 sin( − θ
2
)] + w
2
− 0 .
3
+ λ
6 u
3
[500 sin( − θ
3
)] − w
3
+ 0 .
3 + λ
7 u
3
[500 sin( − θ
3
)] + w
4
− 0 .
3
+ λ
8 u
2 u
3
[1 , 000 sin( θ
2
− θ
3
)] − w
5
+ 0 .
4 + λ
9 u
2 u
3
[1 , 000 sin( θ
2
− θ
3
)] + w
6
− 0 .
4 .
69
The rest of the problem is left as an exercise to the intrepid reader.
In any event, we now see that the AC OPF formulation is quite involved, and its solution is best left to the computer. We will use the principles contained herein to aid us in our understanding of the DC approximation to the AC OPF problem, as addressed in chapter
3.
70
2.A
Shunt elements
While it is usual to ignore shunt elements in DC analysis, the same is not true of AC, so we examine this topic here. As mentioned previously, shunt elements ground overhead lines.
We will now explore two properties of shunt elements: conductance and capacitance. As per
Grainger and Stevenson (1994), conductance exists between conductors or between conductors and the ground. Conductance accounts for current leakage at insulators of overhead lines and the insulation of cables. Since leakage at insulators of overhead lines is trivial, conductance between conductors of an overhead line is usually neglected. Another reason electric engineers generally ignore conductance is that leakage at insulators, the principal source of conductance, changes considerably with atmospheric conditions and with the conducting properties of dirt that collects on the insulators. Another effect, corona, which causes line leakages, also changes appreciably with the weather. Since conductance also has a minimal effect on shunt lines, electrical engineers will generally ignore its effect on shunt admittance. Capacitance of a transmission line results from the potential difference between conductors. Capacitance causes conductors to be charged in the same manner as the plates of a capacitor when there is a potential difference between them. Capacitance between parallel conductors is a constant depending on the size and spacing of the conductors. For lines less than roughly 50 miles (80 km) long, the effect of capacitance is small
and is often neglected. Without going into the technical details,
the capacitance of a transmission line is an increasing function of the (positive) charge of q (Coulombs/meter) and inversely related to the voltage drop along the line, ( v ). In the most basic example, we consider a transmission line composed of two parallel wires. In this case, capacitance is defined as the charge on the conductors (wires) per unit of potential difference between them. That is:
C = q v
F/m (2A.1)
(Farads per meter). We calculate the voltage drop v ab between the two wires of a twowire line by computing the voltage drop due to the charge q a on conductor a and the voltage drop due to the charge q b on conductor b . The voltage drop from one conductor to another due to the charges on both conductors is the sum of the voltage drops caused by each charge alone. This last point is central to our (simplified) analysis. For a twowire line, we have that q a
= − q b
The other determinant of voltage induced by a given charge is the radius of the wire. Assuming that the two wires have the same radius, we have | v ab
| = | 2 v a
| = | 2 v b
| . Since the ground has voltage = 0 V , by definition, the voltage difference between each conductor (of a two-wire shunt element) is v s
= v a
= v b
=
1
2 v ab
Referring to Eq. (2A.1), capacitance to ground, or capacitance to neutral, is thus equal
.
20 See, e.g.
Grainger and Stevenson (1994; Ch. 5).
21
As an EE fried why this holds.
71
to twice the capacitance between the two conductors, or C n
= 2 c ab
We represent these concepts diagrammatically as follows: a b
C ab a: Representation of line-to-line capacitance a
C an
= 2 C ab n
C bn
= 2 C ab b b: Representation of line-to-neutral capacitance
72
Chapter 3
DC Optimal Power Flow and LMP
Derivation
Having covered the principles of AC and DC power flow, as well as the construction of an optimal power flow problem, we now address the DC OPF problem and associated LMP calculations.
The DC OPF problem is the minimization of cost of electricity output, subject to transmission constraints. There are two ways to determine the amount of electricity production.
First, we may assume that consumers face the real-time price of electricity, and we thus construct downward-sloping, location-specific, electricity demand curve. The OPF problem is thus to maximize aggregate social surplus, subject to the various technological constraints present in electricity systems. We will demonstrate this method analytically. Most consumers have never even seen a real-time electricity price, though. For this reason (and because it is less complicated to do so), we assume that electricity demand is perfectly inelastic when solving for LMPs in our sample network.
3.1
Analytical Presentation of DC Optimal Power Flow
We start by analyzing a generic K node transmission network, connecting N ≤ K distinct nodes. We model the relevant concepts as follows:
• Generation. Denote the number of generating units as J . Unit j has maximum output p j
. We ignore unit outages, so that each unit is always available up to full output. Let p j
( t ) denote the output of unit j at time t . The associated constraint is then:
0 ≤ p j
( t ) ≤ ¯ j
, ∀ j = 1 , 2 , . . . , J.
73
• Demand. We model consumers as price-taking expected profit-maximizing firms. Let f i be the short-run value-added function of consumer is use of electricity. Thus, f i is consumer i’s profit, minus the cost of all nonelectricity inputs. Denoting consumer i
0 s electricity use as d i
, the consumers profit is given by:
π i
( t ) = f i
( d i
( t )) − ρ i
( t ) d i
( t ) , where we denote the price of electric energy as ρ . The associated first-order condition is:
∂f i
( d i
( t ))
∂d i
( t )
= ρ i
( t ) .
• Transmission. Flows along line `k at time t are given by ˜
`k
( t ). Ignoring losses, an electric power system has the energy balance constraint:
J
X p j
( t ) = j =1
I
X d i
( t ) .
i =1
Assuming no transmission line failures, real power flow over each line must satisfy: p
`k, min
≤ ˜
`k
( t ) ≤ ˜
`k, max
.
Additionally, power flows depend on generation and demand at each node, or:
˜ ( t ) = p p ( t ) , d ( t ) , H .
where H is again the shift factor matrix.
• Optimization. We use the standard welfare criterion of maximizing consumers’ plus producers’ surplus, subject to the system constraints. For pricing and dispatch decisions, we maximize short-run welfare with a fixed capital stock. The Lagrangian to be maximized over all generation levels p j and over prices ρ i
( t ) is:
L = P i f i d i
( ρ i
( t ))
− P j
ω j p j
( t )
+ λ ( t ) P j p j
( t ) − P i d i
( t )
− P j u j
( t )[ p j
( t ) − ¯ j
]
− P
`k
(˜
`k
( t ) − p
`k, max
) η
`k, max
( t )
+ P
`k p
`k
( t ) − ˜
`k, min
) η
`k, min
( t )
(consumer value added)
(fuel costs)
(energy balance)
(unit capacity constraint)
(upper transmission constraint)
(lower transmission constraint),
(3.1)
74
where ω j is the cost of fuel required by plant type j to produce one unit of electricity and
λ ( t ) , u j
( t ) , and η
`k (max, min)
( t ) are the Lagrange multipliers on the energy balance, unit capacity, and upper and lower transmission constraints, respectively. Note that we may define the shadow value of an additional unit of transmission capacity on a given line as:
η
`k
( t ) = η
`k, max
( t ) − η
`k, min
( t ) .
Since both constraints cannot bind simultaneously, for any given network configuration we have:
η
`k
( t ) ∈ ( η k, max
( t ) , − η k, min
( t ) , 0) .
Differentiating (3.1) with respect for demand yields the equation for the LMP for consumer i as:
ρ
∗ i
( t ) = λ ( t ) +
X
∂ ˜
`k
( t )
η
`k
( t ) .
∂d i
( t )
`k
(3.2)
Of course, a few words are in order here. Note that we have not considered losses in our example, otherwise we would see the term λ t
∂ Λ t in this expression, where Λ( t ) is the
∂d i
( t ) transmission-line loss function. Also notice that we generally speak of LMP at a given node, rather than the LMP facing a given consumer. Replacing the subscript i with j does the trick (that is, we assume that each consumer’s load is located at a single node only).
Now lest us examine this equation in further detail.
We introduced the concept of a
reference- or base node earlier. This node is also known as a “swing bus.” 1
While having used the base node as the reference for the shift factor matrix, we treat the swing bus very much like a numerarie good in LMP calculation. That is to say, we take the marginal cost of a unit of power delivered to the swing bus as a fixed point of reference, and we compute the prices of electricity delivered to any and all other buses in the network by referencing the price at the swing bus. Thus, in ( ??
), the value λ t is the reference price — the value of supplying an additional unit of demand at the swing bus. Although it is not necessary, it is easiest to assume that the marginal generator is located at the swing bus. In this case, the marginal cost of generation for the system (known as “system lambda”) is the same as the marginal value/marginal cost of generation at the swing bus.
The remaining term in the equation is the cost of “congestion”
associated with supplying an additional unit of demand located at generic network node k . This term states that the cost of congestion at any node at time t is equal to that the contribution of an additional
1
Bus and node are synonomous in the EE literature.
2
In the EE literature, a transmission system is said to be congested when transmission line limitations necessitate curtailing the output of certain generator(s) because one or more of the system’s lines is at its upper or lower limit.
75
∂ ˜
`k
( t ) unit of demand of consumer i to power flow over a specific line in the network,
∂d i
( t ) multiplied by the shadow value of incremental capacity of that same line, or η
`k
( t ), summed
over all of the lines of the network.
,
3.2
DC Optimal Power Flow Demonstration
Having developed the general OPF formulation, we now demonstrate DC OPF with an example. And yes, while we stated in the introduction that the goal of this primer is to enable the reader to understand and formulate more complex examples than the simple
3-node model, we will demonstrate the DC OPF model and associated LMP calculations using a 3-node model, because adding more nodes and transmission lines to the example
makes it simply too unruly to demonstrate longhand.
This is not a problem, though as the tools demonstrated here may be applied to a network model of any size.
Let us begin with the 3-node transmission network, shown below:
1
0 + j 1
− 500 ≤ ˜
13
≤ 500 3
0 + j 1
− 500 ≤ ˜
12
≤ 500
0 + j 1
− 500 ≤ ˜
23
≤ 500
2
Figure 3.1: The 3-Node Network
We assume there is a single generator located at node 1 with a constant marginal cost of M C
1
= $40/megawatt hour (MWh) up to its maximum output of ¯
1
= 850 MW.
Likewise, there is a single generator located at node 2 with a constant marginal cost of
M C
2
= $110/MWh up to its maximum output of ¯
2
= 150 MW. Load ( i.e.
energy
3
Yes, the notation still leaves something to be desired.
4 In fact, even with only three nodes, full demonstration of the problem is sufficiently messy that we will gloss over some of the details.
76
demand, d
3
) at node 3 is assumed to be perfectly inelastic at 800 MW. Transmission line characteristics are shown in Figure 3.1.
We start by calculating the shift factor matrix, which we will use to calculate the equations for the maximal amount of output the two generators may produce without violating any
of the constraints on the system’s three transmission lines. Applying (1.31) and (1.32) to
this example yields:
P
1
= sin( θ
1
− θ
2
) + sin( θ
1
− θ
3
) ,
P
2
= sin( θ
2
− θ
1
) + sin( θ
2
− θ
3
) ,
P
3
= sin( θ
3
− θ
1
) + sin( θ
3
− θ
2
) .
Just for practice, we will calculate the full nodal Jacobian, J
(0) before calculating the reduced nodal Jacobian, ˆ
0
. We calculate the first row of the former as follows:
J
(0)
11
=
(0)
J
12
=
(0)
J
13
=
∂P
1
∂θ
1 θ =0
∂P
1
∂θ
2
θ =0
∂P
1
∂θ
3 θ =0
= 2
= − 1
= − 1
Calculating the remaining terms, we have: h
J
(0) i
=
2 − 1 − 1
− 1 2 − 1
− 1 − 1 2
Since power is being withdrawn at node 3 in this example, we will denote this node as the reference node. Thus, subtracting the row and column of the full nodal Jacobian corresponding to node 3, the reduced Jacobian is: h
J
ˆ (0) i
=
"
2 − 1
#
.
− 1 2
Thus: h
J
ˆ (0) i
− 1
=
"
1
3
2
3
2
3
1
3
#
.
77
Likewise, we calculate the network incidence matrix. Since there are three lines in the network, the network incidence matrix is derived from the three equations:
˜
12
= 1 ∗ sin( θ
1
− θ
2
) ,
˜
23
= 1 ∗ sin( θ
2
− θ
3
) , p
13
= 1 ∗ sin( θ
1
− θ
2
) , where we have implicitly calculated B
`k
= Y
`k
/
√
− 1. Note from our discussion in chapter
1, since load is located at node 3, we know that power will flow from nodes 1 and 2 to node
3, accounting for the node ordering in ( ??
) and (1.19). Since there are generators located
at both nodes 1 and 2, the direction of power flow across line 12 is ambiguous. But, given
the parameter values chosen, direction of power flow in (1.11) will obviously be from node
1 to node 2 (by the principle of superposition, which we do not explicitly address here).
We derive the network incidence matrix by holding the phase angle at the reference node
(the “reference angle”) fixed, and forming the matrix of partial derivatives with respect to the system’s other (two) angles. Thus, we have:
K =
∂ ˜
12
∂θ
1
∂ ˜
23
∂θ
1
∂ ˜
13
∂θ
1
∂ ˜
∂θ
∂θ
12
2
∂ ˜
23
∂θ
2
∂ ˜
13
2
=
1 − 1
0 1
.
1 0
And thus, the shift factor matrix, K h
J
ˆ (0) i
− 1 is:
H =
1
3
2
1
3
3
− 1
3
2
3
1
3
.
Post-multiplying the shift factor matrix by [ P
1 systems three lines as:
P
2
]
0 yields power flow across each of the
˜
12
=
˜
23
= p
13
=
1
3
P
1
−
1
3
P
2
,
1
3
P
1
+
2
3
P
2
,
2
3
P
1
+
1
3
P
2
.
78
Since each of the three transmission lines have upper and lower limits equal to | 500 | , we may write the constraints for lines 12, 23, and 13 in terms of generation at nodes 1 and 2 as:
− 500 ≤
− 500 ≤
− 500 ≤
1
3
P
1
−
1
3
P
2
≤ 500 ,
1
3
P
1
+
2
3
P
1
+
2
3
P
2
≤ 500 ,
1
3
P
2
≤ 500 , respectively. Since there is no demand (load) at either nodes 1 or 2, we have that P i
= p i
, i = 1 , 2 .
We thus present the DC OPF problem as: p min
1
,p
2
T C = 40 p
1
+ 110 p
2
, s.t.
− 500 ≤
1
3 p
1
−
− 500 ≤
1
3 p
1
+
− 500 ≤
2
3 p
1
+
1
3 p
2
≤ 500 ,
2
3 p
2
≤ 500 ,
1
3 p
2
≤ 500 , p
1
+ p
2
= 800 ,
0 ≤ p
1
≤ 850 , and
0 ≤ p
2
≤ 150 .
The standard solution method for minimizing a linear problem is linear programming, using the simplex method. Unfortunately, full demonstration of the solution method of this problem by hand is sufficiently messy (and provides only marginal insight) to be
beyond the scope of this paper.
We first simplify the problem by focusing only on the relevant components to the problem. Specifically, we will ignore all nonbinding transmission constraints, as they have no impact on the solution. Ignoring the irrelevant constraints
5
For those uniniatiated in linear programming, we suggest Bradely et.al
(1977).
79
(since we already know the answer), the problem reduces to: min p
1
,p
2
T C = 40 p
1
+ 110 p
2
, s.t.
2
3 p
1
+
1
3 p
2
≤ 500 , p
1
+ p
2
= 800 , p
1
≤ 850 , p
2
≤ 150 , and p
1
, p
2
≥ 0 .
To solve this problem by linear programming, we add slack variables to ( ) and an artificial variable to eq (). The linear programming problem in canonical form is then: min p
1
,p
2
T C = 40 p
1
+ 110 p
2
, s.t.
2
3 p
1
+
1
3 p
2
+ p
3
= 500 , p
1
+ p
4
= 850 , p
2
+ p
5
= 150 , p
1
+ p
2
+ p
6
= 800 , and p
1
, . . . , p
6
≥ 0
Those with linear programming experience will note that x
3
, x
4
, and x
5 are slack variables, while x
6 is an artificial variable.
At this point, let us examine the final tableau (showing the solution to the linear programming problem).
Looking in the CV column, the final tableau tells us that the values of p
1 and p
2 are 700 and
100, respectively (because any variable not uniquely determined in the final tableau is set to zero). The values of p
4 and p
5 yield the excess capacity at the two plants. The coefficients on p
3 and p
6
(read in the ( − z ) row of their respective columns) are the reduced costs for these variables. They are also the negative of the shadow values/Lagrange multipliers for these variables. Thus, increasing x
3
, transmission capacity on line AC , by one unit would decrease the value of the objective function by $210. Likewise, an additional unit of load at node 3 would increase system cost by $180. The alert reader will note that these quantities
80
correspond to:
η
13
( t ) = − $210 , and
λ ( t ) = $180 .
We may also interpret λ ( t ) = $180 as the cost of delivering an additional unit of energy to the reference node (node 3, in our formulation). Since this is the case, we have the node 3
LMP as ρ
3
= $180 /M W h, or LM P
3
= $180 /M W h
We may now calculate LM P
1 and LM P
2 by taking
ρ
∗ i
( t ) = LM P i
= λ ( t ) +
X
∂ ˜
`k
( t )
∂p k
( t )
η
`k
( t ) , i = 1 , 2
`k obtaining:
ρ
1
= $180 +
2
3
( − $210) = $40 /M W h, and
ρ
2
= $180 +
1
3
( − $210) = $110 /M W h, where (2/3) and (1/3) are the respective shift factors for power flowing from nodes 1 and
∂ ˜
12
( t ) ∂ ˜
12
( t )
2 along line 13, and , respectively, while − $210 is the shadow value of
∂p
1
( t ) ∂p
2
( t ) additional capacity on line 13, as mentioned above. In larger network examples when more than one line is congested, one sums the shift factors associated with node i generation times the shadow value of all congested lines. We did that (trivially) in this example as well, implicitly multiplying all of node 1 and node 2 generation’s shift factors times the shadow values of all lines, it just so happened that only one of the lines was congested, and thus had a nonzero shadow value.
7 our demonstration is just a tad different than the standard one found in Schweppe et al.
(1988) and
Bohn et al.
(1984) because explaining shift factors in terms of incremental generation instead of incremental demand makes more sense to us.
81
Bibliography
Baldick R (2006) Applied Optimization: Formulation and Algorithms for Engineering
Systems, Cambridge University Press, New York.
Bohn R, Caramanis M, Schweppe F (1984) Optimal Pricing in Electrical Networks over Space and Time. Rand Journal of Economics 15(3): 360-376.
Bradley S, Hax A, Magnanti T (1977) Applied Mathematical Programming,
Addison-Wesley Reading, MA.
Bushnell J, Stoft S (1997) Improving Private Incentives for Electric Grid Investment.
Resource and Energy Economics 19(1-2): 85-108.
Dale C (1995) Basic Electricity & DC Circuits, Prompt Publications, Indianapolis, IN.
Glover J, Sarma T, Overbye T (2012) Power system Analysis and Design, 5th Edition.
Cengage Learning, Stamford, CT.
Grainger J, Stevenson W (1994) Power System Analysis. McGraw-Hill, Inc., New
York, NY.
Luenberger D (1984) Linear and Nonlinear Programming, 2nd Edition. Addison-Wesley
Publishing Company, Reading, MA.
Mittle V, Mittal A (2006) Basic Electrical Engineering, 2nd Edition, Tata McGraw-Hill
Education Private Limited. New Delhi, India.
Nash S, Stofer A (1996) Linear and Nonlinear Programming. McGraw-Hill, Inc.,
New York, NY.
Rau N (2003) Optimization Principles: Practical Applications to the Operation and
Markets of the Electric Power Industry, IEEE Press, Piscataway, NJ.
Schweppe F, Caramanis M, Tabors R, Bohn R (1988) Spot Pricing of Electricity,
Kluwer Academic Publishers.
Stoft S (2002) Power System Economics. IEEE Press, Piscataway.
82