Sidescan Sonar Aided Inertial Drift Compensation in Autonomous
advertisement

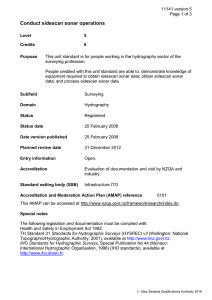
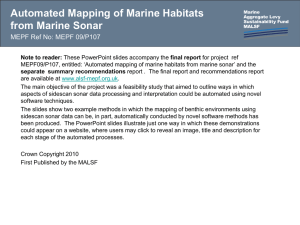
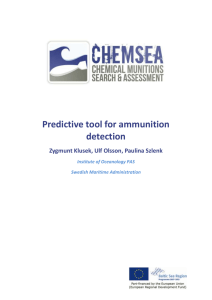
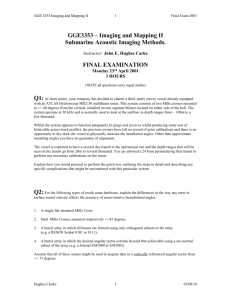
Sidescan Sonar Aided Inertial Drift Compensation in Autonomous Underwater Vehicles Romain Michalec and Cédric Pradalier Georgia Institute of Technology – CNRS (UMI 2958), Metz, France romain.michalec|cedric.pradalier@gatech.edu Abstract—We introduce our first work on terrain-based navigation of autonomous underwater vehicles using sidescan sonars and sidescan sonar maps. It consists in estimating the state of the vehicle from its inertial proprioceptions and sidescan exteroceptions using a particle filter. The novelty is the use of sidescan acoustic perceptions and sidescan sonar maps instead of singlebeam bottom-looking acoustic perceptions and bathymetric maps. Also, the approach is not landmark-based. Our first simulations, although conducted under simplifying hypotheses, show that the approach is valid and may be applied to more complex situations. Therefore, we propose to investigate the use of sidescan sonars and sidescan maps for terrain-based navigation, with a Sequential Monte Carlo method, or particle filter. In this paper, we study the feasability of this approach on a simple trajectory: a constant-depth, constant-speed straight line, used both for the acquisition of the sidescan map and as the current mission. II. R ELATED WORK To the best of our knowledge, the approach we propose has not been tried before, contrary to particle filtering using elevation maps and single-beam bathymetric perceptions, which is a very simple case (Bachmann and Williams 2003; I. I NTRODUCTION Karlsson et al. 2003; Karlsson and Gustafsson 2003), and of Because they image large portions of the sea floor in a course localization using EKF-based feature-based SLAM and relatively short time, sidescan sonars are commonly mounted as sidescan sonar data, which is extensively studied (e.g. Tena imaging payload on autonomous underwater vehicles (AUVs). Ruiz et al. 2001, 2003, 2004; Newman et al. 2003; Williams They are less often used as a source of information for and Mahon 2004; Ribas et al. 2006; Stalder et al. 2008; He et navigation. The reason is that automated extraction of machine- al. 2009; Pinto et al. 2009; Aulinas et al. 2010). usable information from sidescan sonar data is more difficult The main difficulty in feature-based SLAM approaches is than from simpler sensors. automatic feature recognition, and it is still an ongoing problem Inertial and Doppler measurements for instance, as well (Stutters et al. 2008). The reason for that is that naturally as GPS and LBL/USBL fixes, are easy to integrate into a occurring underwater features that are physically meaningful navigation control framework, through Kalman filtering for can have very different sonar returns when insonified from example. Single-beam bathymetric data and, to a lesser extent, different viewing angles (Leblond et al. 2005, 2008), and they multibeam bathymetric data are also easy to take into account, often have amorphous shapes (while SLAM works well with since their interpretation as distances to the sea floor or point and line features). Again, this is representative of the obstacles is straightforward. Sidescan images, on the other difficulty for a computer to interpret images and choose relevant hand, are easy to interpret for humans but less so for computers, features on which to localize. On top of that, SLAM algorithms especially onboard ones that are limited in terms of processing don’t scale well: their computational requirements increase power. quadratically with the number of landmarks used. This makes This is a pity because sidescan images are potentially very FastSLAM necessary when dealing with large areas. Last but informative, due to their large swath range. They might bring not least, reducing a whole image to a set of point features good accuracy and fast convergence to localization methods, as also means that information that could help localization is lost. well as reliable following of learned trajectories when repeating Avoiding that loss and the difficulty of feature extraction are missions. In the later case, using sidescan sonars instead of reasons to consider particle filters on sidescan sonar data. only inertial or Doppler sensors would bring the benefit of drift Of course, the dependency on a map makes particle filtering compensation in missions when GPS resurfacing and LBL/ unadapted for missions in areas which have not been previously USBL localization are undesirable or impossible: missions near mapped. However, if an AUV needs to navigate precisely the sea floor or in the water column, under-ice operations, cost in a well-known environment such as the area surrounding of the instrumentation of the mission location with acoustic a harbor, an existing map will often be available (Stutters beacons and their surface vessels/buoys, and so on. et al. 2008). Such maps are almost always elevation maps (bathymetric maps) constructed from multibeam surveys. As The research leading to these results has received funding from the European Commission FP7-ICT Cognitive Systems, Interaction, and Robotics under the mentioned before, particle filters have been investigated for use contract #270180 (NOPTILUS). with these maps and single-beam bathymetric perceptions only Index Terms—Autonomous underwater vehicles, terrain-based navigation, sidescan sonar, particle filtering. Figure 1. Intensity of the reference starboard acoustic echoes vs. the echo return time (top: s) and the sonar-echo distance (bottom: m). Horizontal line: mean. Figure 2. Intensity of the reference starboard acoustic echoes in the (depth, starboard distance) across-track insonification plane (m). (Bachmann and Williams 2003; Karlsson et al. 2003; Karlsson and Gustafsson 2003). III. M ODELING We consider the following model for the underwater vessel: 0 rk I dtI2 rk−1 = 2 + dt INS 2 INS ak−1 − wk−1 vk 02 I2 vk−1 hSSS = h(rk ) + wkSSS k Figure 3. Intensity of the starboard acoustic echoes predicted by the observation function h from the reference perception of the figure 1 and at the position P indicated by the blue dot on the figure 2, vs. the echo return time (top: s) and the sonar-echo distance (bottom: m). The padding constant used in this observation function was 12 , hence the value of the last samples. The mean of the whole sidescan return is a better padding constant. 2 wkSSS ∼ N (02ns , σSSS I2ns ) is the measurement noise of the sidescan sonars, and ns is the number of echoes in one acoustic return (the high to very high number of samples used in the discretization of the acoustic signal received after a pulse). The observation function h is defined below. SSS stands for sidescan sonar. 2ns A set (hSSS of ni reference percepref (ri ))i∈[|0,ni −1|] ⊂ R tions is available, previously acquired by the sonars along a constant-depth, constant-speed straight line. This set constitutes a sidescan map of the navigated environment, traditionally drawn as a two-dimensional image of width 2ns and height ni (figure 4). Let’s consider one starboard perception: it is a function that maps the sonar-echo distance r ∈ [rmin , rmax ] to the intensity of the echo Iref (r) ∈ [0, 1] (figure 1). We can draw this function in the across-track vertical plane that shows the fan-shaped volume of insonified environment (figure 2). More precisely, the function illustrated in this plane is defined as follow, in polar coordinates with origin on the reference trajectory: ( Iref (r) if (r, θ) ∈ [rmin , rmax ] × [θmin , θmax ] I¯ref (r, θ) = cst otherwise The padding constant can be, for instance, the mean of the acoustic echoes of the sidescan return. Let’s consider a point P in this plane, and the insonified environment seen from it (blue fan on figure 2). We define the following function, in polar coordinates (r0 , θ0 ) with origin at P , by integrating the intensities of the reference echoes that are at distance r0 from the sonar: Z θmax 1 I¯ref (r̃, θ̃)dθ̃ Isim (r0 ) = θmax − θmin θmin In the state relation, (rk , vk ) ∈ R4 is the horizontal position/velocity state vector, aINS ∈ R2 are the horizonk tal accelerations measured by the onboard accelerometers, 2 wkINS ∼ N (02 , σINS I2 ) is the measurement noise of these accelerometers. INS stands for inertial navigation system. The observation relation consists of sidescan sonar mea- where (r̃, θ̃) are the polar coordinates with origin on the surements hSSS ∈ R2ns of port and starboard environments, reference trajectory of the points at distance r0 from the k Figure 4. Particle filtering on sidescan sonar map, projected onto the AUV horizontal plane. Top: initialization. Bottom: estimated state after 150 observations in 5 s over 4.5 m. The green line is the actual trajectory, which was previously used as the insonification trajectory to create the sidescan map. The red line is an inertial estimate of this trajectory. sonar (both non-linear functions of (r0 , θ0 ) with square roots and arc tangents). The resulting function is a model for the starboard perception at point P , as simulated from the reference perception (figure 3). Together with a port part, they make up our observation function h. So defined, the observation function does not depend on the vertical position or on the attitude of the AUV. This is a simplifying hypothesis that can be removed relatively easily for yaw at least: indeed, since the set of reference perceptions was acquired along a straight line, it forms a collection of parallel across-track insonification planes, and the intersections of the fan-shaped insonified environment seen from a point with these planes can be computed. A number of other simplifying hypotheses are used in this work. Those about the reference and current trajectories have already been mentioned. IV. S IMULATIONS Using the developped model, we implement a sampling importance resampling particle filter for reference trajectory following, meaning that we consider the initial state (r0 , v0 ) to be the same as the trajectory start, known to the filter as the mean of a normal distribution of covariance matrix diag[σr20 I2 , σv20 I2 ]. Convergence of this filter on the map we used (ni = 900, ns = 1000, figure 4) is achieved in less than 30 observations in 1 s over 0.9 m, and accuracy is satisfactory after less than a few more seconds (the estimation error drops below half a meter). This is of course due in part to the simplifying hypotheses of this feasability study. Still, this encouraging result shows that our approach is valid and may be applied to less simplified situations, a goal we are currently working toward. Because of the high number of samples in the acoustic returns (ns ) and the high number of reference insonifications (ni ), the computer implementation of the observation function requires an important amount of memory and computing power, both scarce resources on AUVs. We have found that subsampling the acoustic returns and/or subsampling across the insonifications too can hardly be avoided, which unfortunately results in a loss of information and therefore a slower, less precise localization. On the plus side, subsampling can also be used to average out a part of the noise of the insonifications (figure 5), which counteracts the aforementioned loss in localization quality. Figure 5. Smoothing effect of subsampling-averaging the sidescan map. Top row: full map, ni = 769, ns = 700. Middle row: subsampling 1 insonification in 4 without averaging and 1 echo in 5 with averaging (that is to say we averaged 5 echoes into 1). Bottom row: same subsampling, this time with averaging across the insonifications too (that is to say we averaged 4 insonifications into 1). Graphs: starboard insonification no. 225 (no. 57 after subsampling), corresponding to the square object visible at about 7 m along-track, 11 m across-track on starboard. R EFERENCES Aulinas, Josep, Xavier Lladó, Joaquim Salvi, and Yvan Petillot (2010). “Feature based SLAM using side-scan salient objects.” IEEE Oceans (Seattle, WA, USA, 20-23 September 2010), 1-8. URL : http://dx.doi.org/10.1109/ OCEANS.2010.5664461. Bachmann, Alexander, and Stefan B. Williams (2003). “Terrain aided underwater navigation: a deeper insight into generic Monte Carlo localization.” Australasian Conference on Robotics and Automation (Brisbane, Australia, 2003). URL : http://www.araa.asn.au/acra/acra2003/papers/22.pdf. He, Bo, Ke Yang, Shuai Zhao, and Yitong Wang (2009). “Underwater simultaneous localization and mapping based on EKF and point features.” IEEE International Conference on Mechatronics and Automation (Changchun, China, 9-12 August 2009), 4845-4850. URL : http://dx.doi.org/10.1109/ ICMA.2009.5246398. Karlsson, Rickard, Fredrik Gusfafsson, and Tobias Karlsson (2003). “Particle filtering and Cramér-Rao lower bound for underwater navigation.” IEEE International Conference on Acoustics, Speech, and Signal Processing (6-10 April 2003), 6:65. URL : http://dx.doi.org/10.1109/ICASSP.2003.1201619. Karlsson, Rickard, and Fredrik Gustafsson (2003). “Particle filter for underwater terrain navigation.” IEEE Workshop on Statistical Signal Processing (28 September - 1 October 2003), 526-529. URL : http://dx.doi.org/10.1109/SSP. 2003.1289507. Leblond, Isabelle, Michel Legris, and Basel Solaiman (2005). “Use of classification and segmentation of sidescan sonar images for long term registration.” IEEE Oceans (20-23 June 2005), 1:322-327. URL : http: //dx.doi.org/10.1109/OCEANSE.2005.1511734. Leblond, Isabelle, Michel Legris, and Basel Solaiman (2008). “Apport de la classification automatique d’images sonar pour le recalage à long terme.” Traitement du signal (2008), 25.1-2:87-104. URL : http://hdl.handle.net/2042/ 17769. Newman, Paul M., John J. Leonard and Richard J. Rikoski (2003). “Towards constant-time SLAM on an autonomous underwater vehicle using synthetic aperture sonar.” International Symp. on Robotics Research (Sienna, Italy, 2003). Springer Tracts in Advanced Robotics (2005), 15:409-420. URL : http://dx.doi.org/10.1007/11008941_44. Pinto, Miguel, Bruno Ferreira, Aníbal Matos, and Nuno Cruz (2009). “Using side scan sonar to relative navigation.” MTS/IEEE Oceans (Biloxi, MS, USA, 26-29 October 2009), 1-9. IEEE Industrial Electronics (Porto, Portugal, 3-5 November 2009), 2126-2141. URL : http://ieeexplore.ieee.org/xpl/login.jsp? arnumber=5422162. Ribas, David, Pere Ridao, José Neira, and Juan D. Tardós (2006). “SLAM using an imaging sonar for partially structured underwater environments.” IEEE/RSJ International Conference on Intelligent Robots and Systems (Beijing, China, 9-15 October 2006), 5040-5045. URL : http://dx.doi.org/10. 1109/IROS.2006.282532. Stalder, Severin, Hannes Bleuler, and Tamaki Ura (2008). “Terrain-based navigation for underwater vehicles using side scan sonar images.” IEEE Oceans (Quebec City, Quebec, Canada, 15-18 September 2008), 1-3. URL : http://dx.doi.org/10.1109/OCEANS.2008.5151809. Stutters, Luke, Honghai Liu, Carl Tiltman, and David J. Brown (2008). “Navigation technologies for autonomous underwater vehicles.” IEEE Transactions on Systems, Man and Cybernetics, Part C: Applications and Reviews, 38.4:581-589. URL : http://dx.doi.org/10.1109/TSMCC.2008.919147. Tena Ruiz, Ioseba, Yvan Petillot, David M. Lane and C. Salson (2001). “Feature extraction and data association for AUV concurrent mapping and localisation.” IEEE International Conference on Robotics and Automation (2001), 3:2785-2790. URL : http://dx.doi.org/10.1109/ROBOT.2001.933044. Tena Ruiz, Ioseba, Yvan Petillot, and David M. Lane (2003). “Improved AUV navigation using side-scan sonar.” IEEE Oceans (San Diego, CA, USA, 22-26 September 2003), 3:1261-1268. URL : http://dx.doi.org/10.1109/ OCEANS.2003.178034. Tena Ruiz, Ioseba, Sébastien de Raucourt, Yvan Petillot, and David M. Lane (2004). “Concurrent mapping and localization using sidescan sonar.” IEEE Journal of Oceanic Engineering (April 2004), 29.2:442-456. URL : http: //dx.doi.org/10.1109/JOE.2004.829790. Williams, Stefan B., and Ian Mahon (2004). “Simultaneous localisation and mapping on the Great Barrier Reef.” IEEE International Conference on Robotics and Automation (26 April - 1 May 2004), 2:1771-1776. URL : http://dx.doi.org/10.1109/ROBOT.2004.1308080.