Current-Sense Amp Offers Four-Quadrant
advertisement

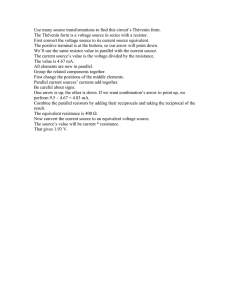
Current-Sense Amp Offers Four-Quadrant Operation By Alfredo H. Saab, Applications Engineering Manager, and Tina Alikahi, Applications Engineer, Maxim Integrated Products, Sunnyvale, Calif. An op amp-based amplifier design overcomes errors associated with resistive current sensing, particularly those resulting from high commonmode voltages. M Current-Sense Challenges any current-sensing ICs are available for applications that require single-quadrant operation, where positive common-mode voltages are present and current flows in only one direction. There are also ICs that can handle current flow in both directions, known as two-quadrant operation. But the choices become more limited when the voltage and current ranges include positive and negative values, which require circuits capable of four-quadrant operation. One solution is a four-quadrant current-sense amplifier design based on op amps and discrete components. This amplifier design minimizes the effects of errors encountered in resistor-based current sensing, particularly those associated with high common-mode voltages. 4.5 V to 76 V I LOAD VSENSE ICHARGE System load and charger Battery RSENSE RS- The simplest way to measure an electrical current is to insert a resistor in its path and sense the voltage drop. Historically, this type of resistor is called a shunt, from the time when all instruments were essentially voltmeters. In these meters, the resistor would shunt the heavy current away from the instrument, allowing the measurement to be taken as a voltage. The term more often used today in electronic systems is “sense resistor,” though sometimes the term “burden resistor” is used. The measurement is easy when one side of the resistor is at the reference potential (ground), and the measurement is called low-side current sensing. When there is a common-mode potential (VCM) added to the difference between the ends of the sense resistor (high-side sensing), the measurement becomes harder as the common-mode voltage is increased. The simplest form of high-side sensing is where only positive common-mode voltages are present and current flows in only one direction. These conditions are described as a single-quadrant operation, which refers to a pair of coordinate axes with VCM and I as the x and y coordinates. Analog semiconductor companies offer a wide array of current-sensing ICs for single-quadrant operation. These devices are reasonably accurate and easy to use. There also are ICs that can handle current flow in both directions (two-quadrant operation). Fig. 1 illustrates a typical application of such an IC. Both circuit types operate with reasonable accuracy within a single-polarity (always positive) range of VCM bounded by maximum and minimum operating voltages. The value of the minimum operating voltage can be defined by the true minimum operating voltage below which the circuit ceases to operate. But since the errors grow rapidly as this true minimum voltage is approached, the useful minimum voltage is usually a higher value. In RS+ VCC MAX4081T REF1A 5V REF1B GND OUT Fig. 1. A current sensor designed for two-quadrant operation handles current flow in both directions, but is restricted to common-mode voltages of a single polarity. Power Electronics Technology February 2008 802PET22.indd 28 28 www.powerelectronics.com 2/12/2008 9:38:37 AM current sensing either case, the minimum voltage rarely includes zero or even gets close to zero. When the current flow to be measured can be in either direction and the VCM can be of either polarity (the four-quadrant case), the measurement becomes more complicated. The complexity of the measurement increases if the requirements for accuracy, precision and frequency response are added to the design considerations. This type of current sensing is required in many motor-control applications, magnetic-field correction systems, and ac or ac + dc circuits. Sources of Error 6/54 M6 Sensing current by way of a series resistor and a high-side sensing IC introduces two errors. One error is the voltage burden, which is the drop across the sense resistor in series with the line voltage. This voltage drop alters the voltage in the measured line. R VAB = VDIFF I A SENSE B The other error is the current burden, VCM the small amount of current “stolen” MAX5490 MAX5490 by the IC for its own operation. This 30 1 1 30 1N4148 current comes from the circuit in which the current is being measured. 1 MF The common-mode operating point MAX4236 MAX4236 also affects measurement accuracy, A1 A2 R2 R1 1 MF because the common-mode rejection 10 M7 10 M7 500 7-var ratio (CMRR) of the sensing circuitry is 1N4148 not infinite. Since the current-carrying +2.5 V [+2.5 V Ref Voltage] R3 331 k7 R4 331 k7 line voltage is a common-mode voltage, [+2.5 V] R5 there is an output-voltage uncertainty T1 R6 5 M7 7 induced by the common-mode error MAX4236 MAX4236 10 MF A3 A4 OUT that must be considered when estimating the error budget. As a consequence, D1 VCC D2 Common FS the CMRR change with temperature is MAX845 SD also a concern. 10 MF GND1 GND2 10 MF -2.5 V The sense resistor must always be in a four-terminal type of configuration, [Common] R7 7 sometimes called a Kelvin connection. In this configuration, there are two pairs Fig. 2. The four-quadrant current sensor shown here can operate under common-mode of terminals — one pair carries the curvoltages up to ±75 V, and has a current-sense voltage input range of ±80 mV for an output of ±2.5 V. (RSENSE is a four-terminal, Kelvin-type resistor. Resistors marked with ** are Caddock-type rent and the other carries the voltage TF626R, 0.01%. Bracketed values are for single-supply operation. Output to circuits (ADCs, etc.) signal. One connection from each pair converges with one of the other pairs at must be taken between OUT and reference voltage.) each resistor end. The connection converging points 6#- 6 define the physical limits of the circuit 6#- 6 section length used for current sensing 6#- 6 the delimited section. If properly imple6#- 6 6#- 6 mented, the four-terminal technique 6#- 6 can exclude undesirable resistances 6#- 6 (contact resistances) that might exist in the current path and the resistor attachments, as well as the influence of resistance in the voltage connections, since they carry no current. It is the resistance of the delimited section that is the real sense-resistor value, the factor that translates directly the value of the current to be measured into voltage, as: VSENSE = RSENSE IMEASURED . As such, the resistor must have a very 4EMPERATURE ª# small temperature coefficient, and its Fig. 3. The amplifier’s dc CMRR behavior over temperature is critical to maintaining accuracy. temperature increase due to dissipation Power Electronics Technology February 2008 802PET22.indd 30 30 www.powerelectronics.com 2/12/2008 9:38:39 AM current sensing -20 -30 -40 VCM = 20 VPK-PK CMRR (dB) -50 -60 -70 -80 -90 -100 -110 -120 0.001 0.01 10 100 35 30 25 20 15 10 5 VCM = 20 VPK-PK VDIFF = 4 mVPK-PK 0 0.001 0.01 0.1 1 10 100 1000 Frequency (kHz) Fig. 5. A plot of gain versus frequency for the sensed voltage signal indicates the range of frequencies over which the amplifier operates with a given acceptable error. If a single op amp, standard instrumentation amplifier configuration is used, the operational amplifier inputvoltage range (usually smaller than the output-voltage swing) is the factor that limits the operating CMR. This factor forces the use of a very small fractional gain, making drift and noise problems worse. With a two op amp instrumentation amplifier topology (where both are configured as inverters), the op amp inputs remain at the reference point — usually 0 V. So, the CMR is limited only by the operational amplifier output swing, allowing a higher CMR for a given supply voltage. For all these amplifier types, the accuracy at the high end of the useful CMR is set mostly by the CMRR. A better CMRR will introduce a smaller uncertainty and, therefore, One solution is to design a high-side current-sensing circuit using discrete op amps. Naturally, this approach has its challenges, too. One difficulty is the fact that most modern high-performance op amps are low-voltage devices, with a total supply voltage of 5 V or less. This fact complicates the circuit design when the common-mode range (CMR) is high. The CMR of a high-side current-sense amplifier has three values. The absolute maximum CMR voltage is the value that, if exceeded, will destroy the amplifier. The operating CMR is the range in which the amplifier will still process the sense-resistor drop. And finally, the useful CMR is the range that the current-sense resistor can swing through while the amplifier still delivers an output within the error limits. 802PET22.indd 31 1 Fig. 4. Data on CMRR as a function of frequency is needed to calculate the uncertainty when VCM is an ac voltage or contains ac components. Four-Quadrant Operation www.powerelectronics.com 0.1 Frequency (kHz) Differntial gain (dB) of its self-generated heat must be limited. This is needed not only to maintain measurement accuracy at a given value of current, but also to keep the linearity of the measurement over the current range. Power dissipation within the resistor is low at low currents, but then grows quickly with the square of the current. Consequently, the value of the resistor might change with the current value, resulting in a nonlinear response if a large change in temperature is allowed. In high-accuracy/precision measurements, where discrete high-stability resistors are used, no copper conductor should be present within the bounds defined by the voltage contacts. That’s because the high-temperature coefficient of copper resistivity (0.39%/°C) will deteriorate the desired sensor performance, even if a good sense resistor is used. Sense resistors also can introduce errors in other ways. They can suffer from hysteresis, not returning to original values after overloads. In addition, these components are subject to long-term value drift (over months or years) if mounted under mechanical stress, which they release slowly while undergoing temperature changes. The designer must reduce all errors to levels compatible with the expected design accuracy by the choice of adequate circuits; choice of sense resistor type, value and tolerance; good mechanical/thermal design; and good electrical layout. When the measurement problem includes a bipolar range both for VCM and for the current to be measured, or includes zero as part of the VCM range, four-quadrant operation becomes a necessity and the selection of available IC solutions is limited. As the range for VCM is increased, IC options become even more scarce for a given accuracy limit. 31 Power Electronics Technology February 2008 2/12/2008 9:38:40 AM current sensing “Step Forward, Raise Value” Fuji Electric Device Technology America, Inc. Piscataway, NJ 08854, U.S.A. Phone: 972-733-1700 Fax: 732-457-0042 For more Info. Visit www.fujisemiconductor.com better accuracy for a given common-mode voltage. The CMRR is a function of the tolerance of the resistors used. As the limits of the CMR are extended higher, the resistor tolerance required for a given accuracy becomes unbearably small. Such precision resistors may not be available, and even when they are, the cost of such resistors may be unbearably high. The circuit in Fig. 2 alleviates these problems. First, the circuit amplifies the sense-resistor voltage. Then, it applies that signal to the amplifier that does the level translation from the common-mode level of the current-carrying line to the ground-referred level. In this way, the ratio of the desired signal to the spurious (or uncertainties) is increased by the gain of the first amplifier. This approach effectively increases the accuracy of the measurement by the same factor. Since the first amplifier reference point needs to move with the common-mode level, it must be powered by an isolated power source. The circuit in Fig. 2 can operate under common-mode voltages up to ±75 V and has an input range (voltage burden) of ±80 mV for an output of ±2.5 V. The VOUT/VDIFF gain is 30, which is accurate within 0.1%. The output-offset voltage at room temperature is less than 100 µV. The current burden is 5 MV or 10 µA total when VCM is 50 V. The absolute maximum voltage (nonoperational) for VCM is limited by the breakdown voltage of R1, R2 or T1, whichever breaks first. Amplifiers A1 and A2 make the first amplifier, powered by an isolated power supply with the MAX845 highfrequency power-supply IC driving a low interwinding capacitance transformer T1. A3 and A4 form the wide-CMR, high-CMRR instrumentation amplifier. Fig. 3 shows the amplifier’s dc CMRR behavior over temperature, which is critical to maintaining accuracy. The graph in this figure allows designers to determine the amount of error introduced by the common-mode voltage into the output voltage at each temperature. For the amplifier described here, this error is adjusted to zero at room temperature (by means of the 500-V potentiometer). The effect is attributed to changes in the ratios R1/R3 and R2/R4 across the temperature range, and is about 2.5-mV change at the output from -10°C to 50°C. Fig. 4 shows the same information as Fig. 3, but as a function of frequency. It presents the CMRR versus frequency needed to calculate the uncertainty when VCM is an ac voltage, or contains ac components. Fig. 5 is the gain as a function of frequency for the sensed voltage signal. This plot shows the range of frequencies (starting from dc) over which the amplifier is useful, within a given acceptable error. The frequency performance is important because it also involves the phase shift behavior, which matters when the current measurement is used to calculate power. In such calculations, there are two considerations. First, there is the frequency dependency of the absolute amplitude of the current in the power formulas. But then, too, the cosine of the phase angle weighs in as the so-called “power factor” in the power calculations. PETech 32 Power Electronics Technology February 2008 802PET22.indd 32 www.powerelectronics.com 2/12/2008 9:38:41 AM