Frequency Response Concepts - Cleveland State University

Cleveland State University
MCE441: Intr. Linear Control Systems
Lecture 12: Frequency Response Concepts
Bode Diagrams
Prof. Richter
1 / 20
Motivation
Frequency Response of a Linear System
Frequency Reponse and the Transfer
Resolving a Signal into Frequencies
Control systems are affected by signals which are often unpredictable: noise, disturbances, reference inputs.
Frequency content can be a better way to characterize these signals, as opposed to time description.
The frequency content of any signal can be obtained analytically or experimentally using Fourier analysis.
Nyquist, Bode and Nichols introduced frequency response methods in dynamics and control in the 1930’s and 40’s.
The first step is to study how linear systems (transfer functions) are affected by signals of various frequencies.
2 / 20
Frequency Reponse and the Transfer
Resolving a Signal into Frequencies
Frequency Response of a Linear System
Dynamic system response is selective to frequency: amplitude changes and phase shifts.
Think of the TF as a frequency-dependent device which alters the amplitude and phase of the incoming sinewave.
The frequency response of a system is a description of the amplitude and phase variations as a function of frequency
We’ll learn how to construct frequency response diagrams.
It can be shown that for t → ∞ :
Amplification Ratio = | G ( jw ) | Phase Shift = ∠ G ( jw )
3 / 20
Frequency Reponse and the Transfer Function
Frequency Response of a Linear System
Resolving a Signal into Frequencies
X sin( wt )
G ( s )
| G ( jw ) | X
| G ( sin( jw wt
) | X
+ G ( jw ))
4 / 20
Demo: Beam with Piezoelectric Actuators
Frequency Response of a Linear System
Resolving a Signal into Frequencies
We use the WinCon real-time control interface to connect to an experiment in the lab over the internet.
The actuator will be excited with a sinewave at 9 Hz. We record the amplitude of tip vibrations as measured by an optical sensor.
We find the experimental values of the amplitude ratio and the phase shift. Then we compare it to the values obtained using the transfer function.
5 / 20
In-Class Demo: Calculation
Frequency Response of a Linear System
Resolving a Signal into Frequencies
G ( s ) :
Input Amplitude:
Input Frequency (rad/s):
Meas. Output Amplitude:
Amplitude ratio:
Meas. Time Shift:
Phase Shift (rad):
| G ( jw ) | :
∠ G ( jw ) :
6 / 20
Handling Non-Sinusoidal Signals
Frequency Response of a Linear System
Resolving a Signal into Frequencies
Two key facts provide a rationale for using freq. response as an analysis tool for more general signals:
Linear systems satisfy superposition : The response to a weighted sum of inputs is the weighted sum of the responses to the individual inputs .
Most signals (even some discontinuous and non-smooth ones) admit a Fourier series expansion . That is, an arbitrary signal may be decomposed as a weighted sum of sinewaves, each one having its own amplitude and phase.
Therefore: We can characterize the reponse of a system to an arbitrary input by resolving the input into a sum of sinewaves and determining the contribution of each frequency to the overall reponse.
7 / 20
Linear Systems and Superposition
Frequency Response of a Linear System
Resolving a Signal into Frequencies
u
1
( t ) u
2
( t ) u
3
( t ) u
4
( t ) u
5
( t )
+
+
+
+
+
G ( s ) y ( t ) u
1
( t ) u
2
( t ) u
3
( t ) u
4
( t ) u
5
( t )
G ( s )
G ( s )
G ( s )
G ( s )
G ( s )
+
+
+
+
+ y ( t )
8 / 20
Resolving a Signal into Frequencies
Frequency Response of a Linear System
Frequency Reponse and the Transfer
value
Time History time power
Frequency Content
Spectral Analysis frequency
9 / 20
Example: Triangle Wave
Frequency Response of a Linear System
Frequency Reponse and the Transfer
We run a Matlab script to display succesive approximations to the triangle wave using sinewaves.
%fourier_triangle
MAX=10;
%plot the original wave x1=[0:0.1:0.5]; x2=[0.5:0.1:1.5]; x3=[1.5:0.1:2]; plot(x1,2*x1,’k’,x2,1-2*(x2-0.5),’k’,x3,-1+2*(x3-1.5),’k’);
%calculate and plot the fourier with up to MAX terms hold on for stop=1:MAX, j=1; for x=0:0.05:2, sum=0; for i=1:2:stop, sum=sum+(-1)^((i-1)/2)*sin(i*pi*x)/i^2; end fx(j)=8*sum/pi^2; j=j+1; end plot([0:0.05:2],fx,’r’) pause end
10 / 20
Frequency Response of a Linear System
Frequency Reponse and the Transfer
Resolving a Signal into Frequencies
Frequency Reponse Diagrams: Bode Plots
The amplification ratio is called Magnitude
The phase shift is called Phase
A Bode plot is a set of two charts: magnitude vs. frequency and phase vs. frequency.
Magnitude peaks can be quite large. For this reason, and to facilitate hand-sketching, the magnitude is charted in decibels (dB) mag (dB) = 20 log( | G ( jw ) | )
Phase is charted in degrees.
A log scale is used for frequency. Phase and dBs are charted using a regular linear scale.
11 / 20
dBs, decades, octaves, attenuation...
Frequency Response of a Linear System
Frequency Reponse and the Transfer
Resolving a Signal into Frequencies
Some freq. response terms: (a lot more later)
Converting x to dB: 20 log x
Decade : A frequency increase by a factor of 10 (one logarithmic unit)
Octave : A frequency increase by a factor of 8.
Attenuation: refers to the decrease in magnitude with frequency. Measured in dB.
Amplification: refers to the increase in magnitude with frequency. Measured in dB.
12 / 20
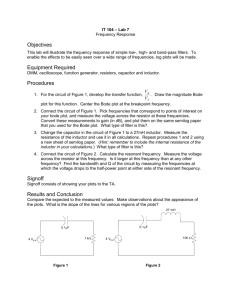
A Typical Bode Plot
Frequency Response of a Linear System
Frequency Reponse and the Transfer
Resolving a Signal into Frequencies
60
40 low freq. gain
20
0
−20
−40
0
−45
−90
−135
−180
−225
−270
10
−2 bandwidth mag. peak mag. crossover freq. phase crossover freq.
10
−1
Frequency (rad/sec)
10
0
10
1
13 / 20
Frequency Response of a Linear System
Frequency Reponse and the Transfer
Resolving a Signal into Frequencies
Hand-Sketching Bode Plots
Key idea: phase angles and log magnitudes of individual factors are added together.
Arrange G ( s ) into normalized pole-zero factors and use templates for each. Then just add the graphs.
Our template:
G ( s ) = Ks k
(
( τ z
1
τ p
1 s s +1)( τ
+1)( τ z 2 p
2 s
1
) ...
s +1) ...
w 2 p
1 s 2 +2 ζ p
1 w p
1 s + w 2 p
1 s 2 +2 ζ z
1 w z
1 s + w 2 z
1 w 2 z
1
Only one 2nd order zero pair and one 2nd order pole pair is shown, but there could be more.
The exponent k can be positive, zero or negative.
14 / 20
Asymptotic Bode Plot Templates
Frequency Response of a Linear System
Frequency Reponse and the Transfer
Resolving a Signal into Frequencies
mag (dB) mag (dB)
0
1
τ p phase
Real Pole :
0 .
1
τ p
1
τ p
10
τ p 0 w (rad/s)
-20 dB/dec
1
τ p s +1 w (rad/s)
0
1
τ z
20 dB/dec w (rad/s) phase
Real Zero : ( τ z s + 1)
−
45 ◦
−
90 ◦
-45 ◦ /dec
90 ◦
45 ◦
0
45 ◦ /dec w (rad/s)
0 .
1
τ z
1
τ z
10
τ z mag (dB)
0 phase k 90 ◦
0
1
20k dB/dec
Mult. root at s = 0 : s k w (rad/s) w (rad/s)
0 mag (dB) w p
Cplx Poles : phase
0 .
1 w p w p
10 w p
0 w (rad/s)
-40 dB/dec
0 mag (dB) s
2 w
2 p
+2 ζ p w p s + w
2 p w (rad/s) w z
40 dB/dec w (rad/s)
Cplx Zeros : s
2
+2 ζ z w z s + w
2 z w
2 z phase
−
90 ◦
−
180 ◦
-90 ◦ /dec
180 ◦
90 ◦
0
0 .
1 w z w z
90 ◦ /dec
10 w z w (rad/s) mag (dB)
20 log K
0 phase
0
Gain : K w (rad/s) w (rad/s)
15 / 20
Finishing Touches
Frequency Response of a Linear System
Frequency Reponse and the Transfer
Resolving a Signal into Frequencies
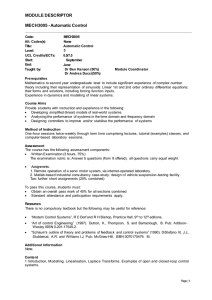
For second-order poles/zeros, find the resonant peak according to damping ratio:
M r
= max | G ( jw ) | =
2 ζ
√ 1
1
−
ζ 2
For first order poles and zeros, account for a ± 3 dB of attenuation/amplification at crossover.
If the crossover frequencies of distinct factors are close together, it is hard to predict the actual attenuation or size of the resonant peak without resorting to finer calculations
(hand/Matlab).
16 / 20
Normalized Second Order Freq. Resp.
Frequency Response of a Linear System
Frequency Reponse and the Transfer
Resolving a Signal into Frequencies
17 / 20
Example
Frequency Response of a Linear System
Frequency Reponse and the Transfer
Resolving a Signal into Frequencies
Sketch the Bode plot for
G ( s ) =
10( s + 3) s ( s + 2)( s 2 + s + 2)
18 / 20
Solution
Frequency Response of a Linear System
Frequency Reponse and the Transfer
Resolving a Signal into Frequencies
19 / 20
Solution
Frequency Response of a Linear System
Frequency Reponse and the Transfer
Resolving a Signal into Frequencies
20 / 20