Low-Cost Passive IR Sensing with RS08KA
advertisement

Freescale Semiconductor
Application Note
Document Number: AN4305
Rev. 0, August 2011
Low-Cost Passive IR Sensing with
RS08KA
by:
Pavel Krenek
Applications Engineering
Roznov CSC, Czech Republic
Contents
1 Introduction
This document describes how to implement a passive infrared
(PIR) motion detector using Freescale's low-cost RS08KA
microcontroller family. The base function of this design is to
switch on appliances, especially lighting, in response to
movement. The main idea behind this solution is to replace the
common analog motion detector with an ultra low-cost digital
design, based on the MC9RS08KA1. The most important part
of this document consists of the detection algorithm and the
method for measuring the analog signal from the PIR sensor.
This document focuses on a software sigma-delta analog-todigital conversion method, and shows in detail all parts of the
hardware and software implementation of a passive infrared
(PIR) detector.
1
Introduction.................................................................1
2
Sigma-delta conversion ..............................................3
2.1
Sigma-delta conversion method..................................3
2.2
Implementation of sigma-delta conversion in PIR
application...................................................................3
3
Hardware implementation...........................................5
3.1
Power supply and switching.......................................5
3.2
User input measurement.............................................7
3.3
Sigma-delta measurement...........................................8
3.4
Zero-cross detection and light dimming.....................9
3.5
Complete schematic....................................................9
4
Software implementation..........................................12
4.1
Precharging and discharging bandgap voltage.........13
The main feature of this document is a demonstration of the
capabilities of the low-cost RS08KA series of MCUs. It also
shows fully functional and practical implementation and use
of ultra-low-cost microcontrollers, but does not include some
necessary peripherals for measuring and creating complex
solutions using PIR sensing.
4.2
Single-sample measurement.....................................15
4.3
Filtration of signal from PIR Sensor.........................17
4.4
Sensitivity setting......................................................18
5
Using the PIR detector..............................................19
6
Bill of materials.........................................................19
All schematics, board layout, and complete software pack are
available on freescale.com.
7
References.................................................................20
Features include:
• Design of low-cost PIR motion detector based on
HC9RS08KA MCU
© 2011 Freescale Semiconductor, Inc.
Introduction
•
•
•
•
•
Implementation of software sigma-delta converter based on analog comparator
Implementation of measurement of input user values
Filtration method for signals from the PIR sensor
Power switching by using two additional components: relay and triac
Possibility of light dimming for the triac
Capacitive power supply
12V DC
5V DC
230V AC
APPLIANCE
MC9RS08KA
PIR sensor
Microcontroller
Switching relay
Figure 1. Block schematic for all applications using relay output
Capacitive power supply
12V DC
5V DC
230V AC
APPLIANCE
MC9RS08KA
PIR sensor
Microcontroller
Triac switching
Figure 2. Block schematic for all applications using triac output
Low-Cost Passive IR Sensing with RS08KA, Rev. 0, August 2011
2
Freescale Semiconductor, Inc.
Sigma-delta conversion
2 Sigma-delta conversion
The key point of this reference design is to demonstrate how to use the low-cost RS08KA microcontroller family in a PIR
sensor application. The RS08KA MCU family does not include an internal A/D converter; therefore, measuring the signal
from the PIR sensor is managed via a modified conversion based on an analog comparator and other passive components.
This measuring method is detailed in the following part of this document. The basic principle is shown in Figure 3.
Analog
value
High-pass
filter
Integrator
Comparator
Sigma-delta
software
Digital
output
Negative
feedback
Figure 3. Block digram of basic sigma-delta conversion
2.1 Sigma-delta conversion method
One of the most important aspects of the sigma-delta technique is the ability to use it for converting an analog signal to a
digital signal. Some high-end MCUs implement a hardware sigma-delta ADC peripheral. The RS08KA family of MCUs does
not include an AD converter; therefore the converter is implemented via software and external components. The application
discussed in this document uses an internal analog comparator with bandgap reference.This method of signal conversion uses
a minimum of additional components. The most important feature of this conversion method is the ability to realize an
application like this on low-cost microcontrollers without an analog-to-digital (A/D) conversion peripheral.
The principle used in the detection method is based on a modified sigma-delta A/D converter. The accuracy of the conversion
is dependent on a couple of factors:
• Input leakage current of the analog sense pin
• Fast charge and discharge of pin in its quiescent state
Leakage current in the integration capacitor will also cause errors in accuracy due to asymmetric charge/discharge conditions.
In this application, however, it is the difference in consecutive A/D values which will cause an event trigger. As a
consequence, small changes in absolute accuracy will not affect the overall result, making such a method a good choice for
this application. This conversion method is linear throughout the range of conversion. This method has a lower conversion
speed but one that is still fully sufficient for a PIR application.
2.2 Implementation of sigma-delta conversion in PIR application
Low-Cost Passive IR Sensing with RS08KA, Rev. 0, August 2011
Freescale Semiconductor, Inc.
3
Sigma-delta conversion
The input signal from the PIR sensor is capacitively coupled to the integration capacitor Ci (15 nF) by capacitor Cf (150 µF).
The higher value of DC filtration capacitor Cf allows using lower values for the input and output resistors. This helps with
higher noise resistance. Amplification is set depending on the PIR output voltage range. The PIR sensors have a very low
voltage output (for example, about tens of microvolts); therefore amplification must be as high as possible. In this application
an amplification of about 1400 is used.
The most important element of the measuring process is that the charging and discharging of the integration capacitor are
independent of output feedback from the analog comparator. The input voltage is compared on the analog comparator with
the internal bandgap reference (1.2 V), and the result from the comparator is used as negative feedback to the negative input
of this comparator. The output voltage from the analog comparator is sampled by two software counters in the MCU. One is
used as a loop counter and the second counts the number of output results in logic 1.
ref 1.2 V
+
-
SW
acomp -IN
GPIO
MCU
Iin
Rout
Cf
input signal
OUT
Iout
Rin
Ci
3.3V
0V
t
1.2V
0V
t
Figure 4. Basic block scheme of sigma-delta conversion method
If the value of the negative input to the comparator is lower than the bandgap value, the counter is decremented and the
output value is set to a logic 1 (capacitor Ci is charged). In the second case, if the value is greater than the bandgap value,
then the counter is incremented and the output value is set to logical 0 (capacitor Ci is discharged). By charging and
discharging capacitor Ci, the voltage level is maintained at the bandgap level. User software running on the MCU processes
the results from the comparator and returns a value representing the measured voltage.
Low-Cost Passive IR Sensing with RS08KA, Rev. 0, August 2011
4
Freescale Semiconductor, Inc.
Hardware implementation
The PIR application uses 15-bit resolution in this sigma-delta conversion method. This means that one voltage sample
consists of 32768 logical states. A detailed schematic is shown in Figure 5.
Figure 5. Complete schematic of sigma-delta converter
3 Hardware implementation
The hardware implementation includes two versions of a PIR application with different power switching outputs and power
supplies:
• Relay power output version
• Triac power output version
Each of these hardware implementations consists of three individual parts:
• Sigma-delta measurement
• User input
• Power switching (with power supply)
All of these are described in detail in the following subsections. The final version of the board for both solutions is shown at
the end.
3.1 Power supply and switching
Capacitive power supply with relay switching
Low-Cost Passive IR Sensing with RS08KA, Rev. 0, August 2011
Freescale Semiconductor, Inc.
5
Hardware implementation
For this PIR application, a capacitive transformerless power supply was chosen. The complete schematic is shown in Figure
6. This capacitive power supply uses a bridge rectifier with two Zener diodes. The Zener diodes in the bridge work as
rectifier diodes and also stabilize the output voltage to 24 V. The application uses two voltages. First, 24 V is used for driving
the relay output. The second voltage is a stabilized 5 V for the MCU supply. Positive voltage regulator 78L05 is used to
reduce voltage ripple. Maximal output current is about 45 mA .
Figure 6 also includes the switching part of the application. The first method of power switching uses a component relay. The
relay is driven by the MCU via a bipolar transistor with protection diode D5. The switching section is designed for 24 V relay
output.
470K
1
A
C3 0.33uF-275V
CON_2_TB
J2
1
1
+
C4
100uF
BZV55
D3
2
R3
220
S1M-13-F
D4
1
2W
S1M-13-F
VIN
NC4
NC5
C1
0.1UF
VOUT
1
MC78L05
2
K1
3
2
4
1
1
D5
LL4148
2
J4
1
4
5
1
J3
1
8
BZV55
2
2
B
1
D2
VCC5V
U1
1
GND
GND
GND
GND
470K
J1
D1
2
2
3
6
7
R2
1
R1
1
OJE-SS
J5
R4
3
1
1
1
POWER SUPPLY & SWITCHING PART
2
Q1
PW R_OUT
10K
Figure 6. Capacitive power supply and relay switching schematic
Capacitive power supply without rectifier bridge and with triac switching
This variant of the power supply has lower power loading and is therefore targeted only for the triac version. This capacitive
power supply uses one Zener diode for rectification and a second diode for creating virtual ground. Linear negative voltage
regulator 79L05 is used to stabilize the output voltage, due to the polarity of the triac switching. For this reason the logic of
the design must be reversed from 5 V to –5 V, compared to the relay design. All connections are shown in Figure 7.
The schematic also includes power switching with a triac. The triac is connected to –5 V power supply and is driven by the
MCU via resistor R15 (680 Ω).
The main disadvantage of this low-cost power supply is in using the negative voltage regulator, because the price of the
negative regulator compared to positive is much higher.
Low-Cost Passive IR Sensing with RS08KA, Rev. 0, August 2011
6
Freescale Semiconductor, Inc.
Hardware implementation
U2
A
B
2
R14
330
J1
C10 0.33uF-275V
1
2
4
5
D2
BZV55-C
1
D1
+
C9
470uF
NC4
NC5
VOUT
1
GND
GND
GND
GND
R16
1M
P5V
VIN
2
3
6
7
1
8
MC79L05
2
LL4148
P5V
CON_2_TB
J2
1
1
LINE
J3
1
1
1
J4
R15
680
PW R_OUT
Q2
2
1
1
3
J5
1
1
POWER SUPPLY & TRIAC SWITCHING PART
Figure 7. Schematic of capacitive power supply without rectifier bridge and with triac
switching
3.2 User input measurement
Input measurement is a time delay measurement taken from a capacitor and a trimmer, with an optional sensor for both input
values.
Setting and measuring brightness is implemented using a trimmer and an ambient light resistor with parallel connected
resistor. The parallel connected resistor has the same value as the trimmer and therefore serves as the resistivity limiter of the
ambient light resistor. Because of the low number of MCU pins, the value of the two variables must be combined into one.
Because BKGD is used for code programing and GPIO, in the application jumper SH1 shown in the schematic serves as a
separator before programming.
Measurement of the time delay depends only on the value of the trimmer R7, which is set by the user. The complete
schematic for measuring input values is shown in Figure 8.This section of the application is identical for both versions of the
implementation.
Low-Cost Passive IR Sensing with RS08KA, Rev. 0, August 2011
Freescale Semiconductor, Inc.
7
Hardware implementation
INPUT MEASURING
OUT/BKGD
1
SH1
R5
1.0K
2
1
2 3
R6
47K
R12
47K
2
R7
47K
LIGHT_MEAS
1
3
R8
11-20K
TIME_SET
C10
0.015UF
C9
0.015UF
VCC5V
V
1.7V
1.2V
3.3V
log 1
log 0
0
T - measured time
t
Figure 8. Schematic of ambient light and time delay measuring
3.3 Sigma-delta measurement
The PIR application uses one dual-element PIR sensor for motion detection. The complete schematic of the measurement
section is shown in Figure 9. An LHI778 module from PerkinElmer was used for the PIR sensor.
Two 100 nF capacitors are connected to the PIR sensor for noise filtration, and a load resistor (R11) is used to ensure the
correct operation of the motion sensor. C6 and R9 function as a hi-pass filter to remove the DC signal. For the purposes of
motion detection, it is sufficient to sense a signal of 2 Hz. The integration capacitor is charged and discharged via resistor
R10 on output pin BKGD. The BKGD pin is also used for user input measuring of time delay and brightness via RC circuits.
This measurement section is identical for the relay version and the triac version of PIR implementation.
Measuring the low voltage signal from the PIR sensor is managed by one MCU peripheral analog comparator. Because of the
MCU's low pin count, only the negative input of the comparator is used, and input voltage from the PIR sensor is compared
with the internal bandgap reference. The sigma-delta conversion is described in detail in the "Sigma-delta conversion" section
of this application note.
Low-Cost Passive IR Sensing with RS08KA, Rev. 0, August 2011
8
Freescale Semiconductor, Inc.
Hardware implementation
BDM1
1
3
5
VCC5V
VCC5V
2
4
6
HDR 2X3
C5
0.1UF
Q2
D
3
C8
0.1UF
GND
C6
150UF
MCU CONNECTION
R9
3.3K
R10
4.7M
LIGHT_MEAS
TIME_SET
OUT/BKGD
RESET
ACMP_IN
PW R_OUT
+
S
2
1
R11
100K
5
6
2
1
7
8
U2
PTA5/KBIP5
VDD
PTA4/KBIP4
PTA3/ACMPO/BKGD/MS
PTA2/KBIP2/TCLK/RESET/VPP
PTA1/KBIP1/ACMPPTA0/KBIP0/ACMP+
VSS
VCC5V
3
4
C7
0.1UF
MC9RS08KA1CSC
0.015UF
C11
LHI778
Figure 9. Schematic of sigma-delta measurement circuit
3.4 Zero-cross detection and light dimming
One of the advanced features of the triac design is the ability to use it for light dimming. This feature is included only in the
version with triac power output. Light dimming means continuous regulation of light brightness when is the light turned on
and also turned off. For light dimming it is important to have a circuit for measuring zero cross. This simple zero cross
detector is created by two diodes and two resistors with one capacitor, as shown in Figure 10. Resistors R8 and R9 must have
a package with voltage tolerance at 230 V (minimal recommended package is 1206). Light dimming has a positive impact on
bulb life span.
ZERO-CROSS DETECTION
R8
P5V
LINE
1
150K
D3
LL4148
ZERO-CROSS
1
2
R9
150K
D4
LL4148
2
C8
100PF
Figure 10. Zero-cross detection circuit
3.5 Complete schematic
The complete schematic of each application is shown here: with relay power output (Figure 11) and triac power output
(Figure 12).
Low-Cost Passive IR Sensing with RS08KA, Rev. 0, August 2011
Freescale Semiconductor, Inc.
9
B
C
2
1
1
1
1
1
5
R7
47K
R6
47K
R8
11-20K
VCC5V
C9
0.015UF
2
R5
1.0K
R12
47K
C10
0.015UF
2
0
SH1
S1M-13-F
2W
TIME_SET
LIGHT_MEAS
OUT/BKGD
4
1
1
4
Q1
BC817-40LT1G
OJE-SS
2
K1
3
1
+
10K
R4
D5
LL4148
C4
100uF
LHI778
Q2
GND
S
D
1
C8
0.1UF
3
2
VCC5V
C6
150UF
C5
0.1UF
R11
100K
R9
3.3K
SIGMA-DELTA CONVERTER
2
BZV55
D3
2
POWER SUPPLY & SWITCHING PART
1
1
1
1
INPUT VALUES
J5
J4
J3
J2
1
BZV55
S1M-13-F
D4
1
1
2
D2
D1
R3
220
C3 0.33uF-275V
470K
470K
2
+
Freescale Semiconductor, Inc.
A
B
A
CON_2_TB
J1
R2
R1
4
1
2
D
1
3
1
2 3
1
3
C1
0.1UF
3
0.015UF
C11
R10
4.7M
PW R_OUT
3
U1
NC4
NC5
VIN
1
MC78L05
VOUT
VCC5V
2
4
6
HDR 2X3
BDM1
LIGHT_MEAS
TIME_SET
OUT/BKGD
RESET
ACMP_IN
PW R_OUT
1
3
5
5
6
2
1
7
8
VCC5V
2
MC9RS08KA1CSC
2
4
3
C7
0.1UF
VCC5V
Monday, January 03, 2011
Date:
1
Sheet
3
SCH-26843 PDF: SPF-26843
Document Number
Size
A3
Approved:
Petr Gargulak
Main schematic page
Page Title:
Drawn by:
Pavel Krenek
PIR reference design
1. maje 1009
765 61 Roznov p. R. Czech republic, Europe
Freescale Semiconductor RCSC
1
of
3
Rev
X1
This document contains information proprietary to Freescale Semiconductor and shall not be used for
engineering design, procurement or manufacture in whole or in part without the express written permission
of Freescale Semiconductor.
ICAP Classification:
FCP: ____
FIUO: X
PUBI: ____
Drawing Title:
Designer:
Pavel Krenek
PTA5/KBIP5
VDD
PTA4/KBIP4
PTA3/ACMPO/BKGD/MS
PTA2/KBIP2/TCLK/RESET/VPP
PTA1/KBIP1/ACMPPTA0/KBIP0/ACMP+
VSS
MCU CONNECTION
U2
BDM CONNECTION
4
5
8
GND
GND
GND
GND
2
3
6
7
10
2
5
A
B
C
D
Hardware implementation
Low-Cost Passive IR Sensing with RS08KA, Rev. 0, August 2011
1
1
1
1
1
1
1
1
Q2
5
P5V
C5
0.015UF
R3
47K
2
R1
1.0K
R4
11-20K
INPUT VALUES
J5
J4
2
1
CON_2_TB
B
A
R15
680
PW R_OUT
LINE
1
LL4148
D1
D2
BZV55-C
2
+
C9
470uF
4
5
U2
NC4
NC5
VIN
1
MC78L05
VOUT
P5V
C6
0.015UF
LIGHT_MEAS
TIME_MEAS
R17
47K
R2
47K
2
OUT/BKGD
4
LHI778
Q1
GND
S
D
1
C4
0.1UF
3
2
P5V
C2
150UF
C1
0.1UF
R7
100K
R6
3.3K
SIGMA-DELTA CONVERTER
POWER SUPPLY & TRIAC SWITCHING PART
0
SH1
3
P5V
C10 0.33uF-275V
(275VAC)
R16
1M
1
2
8
GND
GND
GND
GND
2
3
6
7
4
+
A
B
C
J3
J2
J1
R14
330
1
2
3
0.015UF
C7
R5
4.7M
3
150K
R8
C8
100PF
R9
150K
2
4
6
HDR 2X3
BDM1
LIGHT_MEAS
TIME_MEAS
OUT/BKGD
ZERO-CROSS
ACMP_IN
PW R_OUT
1
3
5
5
6
2
1
7
8
P5V
D4
LL4148
ZERO-CROSS
D3
LL4148
MC9RS08KA1CSC
2
4
3
P5V
C3
0.1UF
Freescale Semiconductor, Inc.
Tuesday, January 11, 2011
Date:
1
Sheet
3
SCH-26843 PDF: SPF-26843
Document Number
Size
A3
Approved:
Main schematic page
Page Title:
Drawn by:
Pavel Krenek
PIR reference design
1. maje 1009
765 61 Roznov p. R. Czech republic, Europe
Freescale Semiconductor RCSC
1
of
4
Rev
X1
This document contains information proprietary to Freescale Semiconductor and shall not be used for
engineering design, procurement or manufacture in whole or in part without the express written permission
of Freescale Semiconductor.
ICAP Classification:
FCP: ____
FIUO: X
PUBI: ____
Drawing Title:
Designer:
Pavel Krenek
PTA5/KBIP5
VDD
PTA4/KBIP4
PTA3/ACMPO/BKGD/MS
PTA2/KBIP2/TCLK/RESET/VPP
PTA1/KBIP1/ACMPPTA0/KBIP0/ACMP+
VSS
U1
P5V
MCU CONNECTION
BDM CONNECTION
LINE
2
ZERO CROSS DETECTION
1
2
1
2
D
1
3
1
2 3
1
5
A
B
C
D
Hardware implementation
Low-Cost Passive IR Sensing with RS08KA, Rev. 0, August 2011
11
Software implementation
4 Software implementation
This section describes all algorithms and programming techniques used in the PIR motion solution. The main part of the
software is focused on measuring voltage from the PIR sensor, but also included are input measurement with filtration and
the complete structure of application.
The software is not platform-dependent. It can be used also on higher-end MCU platforms.
The behavior of the main application is shown in Figure 13.
Low-Cost Passive IR Sensing with RS08KA, Rev. 0, August 2011
12
Freescale Semiconductor, Inc.
Software implementation
Main function
Initialization:
Clock, WDT, GPIO,
RC measuring,
PWR output
PWR output ON
(five second delay)
Bandgap precharger
for (;;)
Single sample
measurement
Motion filtering
Pir poll function
Figure 13. Motion detection software flowchart
Low-Cost Passive IR Sensing with RS08KA, Rev. 0, August 2011
Freescale Semiconductor, Inc.
13
Software implementation
4.1 Precharging and discharging bandgap voltage
After all peripherals are initialized, the relay is turned on for five seconds. Then the function to precharge the input filtration
capacitor is called via the GPIO pin. Precharging of this capacitor allows speedup of sigma-delta converter initialization. The
bandgap precharging procedure is shown in Figure 14.
Bandgap
Precharger
Bandgap precharger
Voltage
measurement
Sigma Delta
deinitialization
Voltage
< 1.2 V ?
YES
Charging
NO
Discharging
NO
Sigma Delta
initialization
Voltage
measurement
Voltage
~ 1.2 ?
End
Figure 14. Bandgap precharging flowchart
Low-Cost Passive IR Sensing with RS08KA, Rev. 0, August 2011
14
Freescale Semiconductor, Inc.
Software implementation
The next code block shows the function for precharging of integration capactior to bandgap value. This function serves for
faster charging and discharging of input DC capacitor via the GPIO pin.
/**************************************************************************//*!
* @brief function is used for pre-charging or pre-discharging of input
*
DC-filtration capacitor
*
******************************************************************************/
void SWSD_BandgapPreCharger(void)
{
Byte cnt;
cnt = 0;
// capacitor is charged ~5 V
if(SWSD_OneSampleMeasuring() == 0)
{
do
{// discharging capacitor to voltage 1.2 V
SWSD_ChargingTimeDelay(SWSD_DISCHARGE);
}while((SWSD_OneSampleMeasuring() <= BANDGAP_SAMPLES) && (++cnt));
}
// capacitor is discharge ~0 V
else if(SWSD_OneSampleMeasuring() == BANDGAP_SAMPLES)
{
do
{// charging to bandgap value 1.2 V
SWSD_ChargingTimeDelay(SWSD_CHARGE);
}while((SWSD_OneSampleMeasuring() >= BANDGAP_SAMPLES) && (++cnt));
}
SWSD_Init(); // initialization of sigma-delta measuring
}
/**************************************************************************//*!
* @brief 100ms delay with init and deinit of analog comparator
*
******************************************************************************/
static void SWSD_ChargingTimeDelay(byte charge_state)
{
Byte ix;
SWSD_DeInit();
ACMP_IN_DD = OUTPUT;
ACMP_IN_D = charge_state;
}
//
//
//
deinitialization of analog comparator
direction to output
CHARGE or DISCHARGE of input DC-filter capacitor
for(ix=0; ix<SWSD_REPEAT; ix++)
{
asm nop;
__RESET_WATCHDOG();
}
SWSD_Init();
// initialization of sigma-delta converter
ACMP_IN_DD = INPUT;
// direction to input
4.2 Single-sample measurement
The basis of sigma-delta measuring is a function performing single-sample measurement. This function returns a number of
values of logical 1 in one cycle — this number depends on the resolution set in the header file. The next section shows the
flowchart and code block for this function.
Syntax:
• Word SWSD_OneSampleMeasuring(void);
Parameters:
• None
Return:
Low-Cost Passive IR Sensing with RS08KA, Rev. 0, August 2011
Freescale Semiconductor, Inc.
15
Software implementation
• cnt - value of logical 1 in buffer
Description:
• This function include two counters and counts actual logical states depending on the resolution set in the header file.
Single-sample
measurement
Single-sample
measurement
Set number of samples
Decrement
Max_samples
Increment
Counter0
Increment
Counter1
YES
Samples <
Max_samples
YES
ACOMP
OUT = 1
NO
NO
Return sample
value
Figure 15. Sigma delta single-sample measurement flowchart
Following code block shows function for measuring of one sample.
/**************************************************************************//*!
* @brief
Reading data from analog comparator
*
* @return
number of log 1 in one sample (depend on the number of bits)
******************************************************************************/
Word SWSD_OneSampleMeasuring(void)
{
Word i;
Word temp_cnt0, cnt;
cnt = temp_cnt0 = 0;
i = SWSD_SAMPLES;
Low-Cost Passive IR Sensing with RS08KA, Rev. 0, August 2011
16
Freescale Semiconductor, Inc.
Software implementation
}
do // counting values of log 1 on the output of comparator
{
// comaparator output is in log 1
if(ACMP_INTERNAL_OUT) //---------------------------------------------<
{
//
<
ACMP_OUT_D = 1;
//
SECTION A
<
cnt++;
//
<
}
//---------------------------------------------<
// comparator output is in log 0
else
//---------------------------------------------<
{
//
<
ACMP_OUT_D = 0;
//
<
temp_cnt0++;
//
SECTION B
<
asm nop;
//
<
asm nop;
//
<
asm nop;
//
<
};
//---------------------------------------------<
} while (--i); // number of all samples depend on the bit number
return cnt;
// return complete number of logical 1 in one sample
//-----------------------------------------------------------------------------// For the correct measuring alghorithm of sigma delta must be time intervals
// of both section (SECTION A and SECTION B) same.
//------------------------------------------------------------------------------
4.3 Filtration of signal from PIR Sensor
Filtration of the signal from the PIR sensor is a necessary condition for the correct detection of movement. The most
important feature of the filtration is the removal of spurious signals (peaks and noise).
The first element of the motion filtration is the use of two four-byte buffers for continuously saving the data in a one-second
time range. The next step creates moving averages by using the two sums of the values stored in in each buffer and
calculating the difference between these sums. This calculated value is compared with the static threshold which corresponds
to the maximum output noise from the PIR sensor.
Complete source code of the filtration function is shown in the following code block. The system of motion filtration is
displayed in detail in Figure 16.
Syntax:
• Word PIR_MotionFiltering(Word new_value);
Parameters:
• new_value
Return:
• diff - difference between two moving averages
/**************************************************************************//*!
* @brief Function for filtering of accidental peaks and noise.
*
The base is derivation of processed signal
******************************************************************************/
Word PIR_MotionFiltering(Word new_value)
{
// local variables
static Word buff0[PIR_BUFF_SIZE_4B];
static Word buff1[PIR_BUFF_SIZE_4B];
static LWord sum0;
static LWord sum1;
static Byte ix;
Word diff;
Low-Cost Passive IR Sensing with RS08KA, Rev. 0, August 2011
Freescale Semiconductor, Inc.
17
Software implementation
// sum of first 4 samples
sum0 += new_value;
sum0 -= buff0[ix % PIR_BUFF_SIZE_4B];
// following sum of next 4 samples
sum1 += buff0[ix % PIR_BUFF_SIZE_4B];
sum1 -= buff1[ix % PIR_BUFF_SIZE_4B];
buff1[ix % PIR_BUFF_SIZE_4B] = buff0[ix % PIR_BUFF_SIZE_4B];
buff0[ix % PIR_BUFF_SIZE_4B] = new_value;
// differention between two following sums
if(sum0 > sum1)
diff = (Word)(sum0 - sum1);
else
diff = (Word)(sum1 - sum0);
}
ix++;
return diff;
100ms
25ms
1
2
3
t
buff1[4 Bytes]
buff0[4 Bytes]
4
5
6
7
8
sum1
sum0
diff = abs(sum0 - sum1)
Figure 16. Motion filtering system
4.4 Sensitivity setting
The system can be made more or less sensitive by assigning larger or smaller values to the macro used to detect movement.
The sensitivity can be changed in file "main.h" by increasing the macro MOTION_THRESHOLD. The default sensitivity
setting in the software corresponds to the minimum threshold (maximum possible sensitivity).
Low-Cost Passive IR Sensing with RS08KA, Rev. 0, August 2011
18
Freescale Semiconductor, Inc.
Using the PIR detector
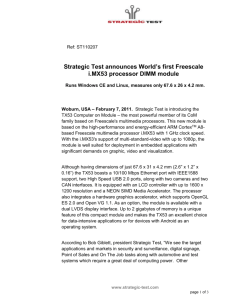
5 Using the PIR detector
This passive infrared solution is targeted only for indoor situations, especially indoor light switches.
The main advantage of this design is the opportunity to make adjustments for the intended purpose, for example for use in
burglar alarm systems, monitoring visitor presence, and light switches. Figure 17 shows the real detection range of the PIR
detector.
The next important aspect of the hardware design is the use of the correct type of Fresnel lens. For our purposes a Fresnel
lens with two sensor elements was used. This design is ready for implementation of different Fresnel lenses for various
application types (home lighting, garden lighting, etc.).
pir detector
6m
8m
Figure 17. PIR detector maximum range
6 Bill of materials
Part reference
Table 1. Bill of Materials
Quantity
Component symbol
Description
MC9RS08KA1CSC
1
U2
Microcontroller
MC78L05
1
U1
Voltage regulator
100 nF
4
C1, C5, C7, C8
Ceramic capacitor
330 nF / 275 V
1
C3
Polypropylen capacitor
100 µF
1
C4
Electrolytic capacitor
150 µF
1
C6
Electrolytic capacitor
15 nF
3
C9, C10, C11
Ceramic capacitor
Table continues on the next page...
Low-Cost Passive IR Sensing with RS08KA, Rev. 0, August 2011
Freescale Semiconductor, Inc.
19
References
Table 1. Bill of Materials (continued)
Part reference
Quantity
Component symbol
Description
BZV55
2
D1, D2
Zener diode
S1M-13-F
2
D3, D4
Rectifier diode
LL4148
1
D5
Small signal diode
HDR 2x3
1
BDM1
Header BDM
CON_2_TB
1
J1
Power connector
Long male pin
4
J2, J3, J4, J5
Switching connector
OJE-SS
1
K1
Relay
BC817-40LT1G
1
Q1
NPN transistor
LHI778
1
Q2
Passive infrared sensor
470k
2
R1, R2
Resistor 0.25 Ω
220
1
R3
Resistor 2 Ω
10k
1
R4
Resistor 0.25 Ω
1k
1
R5
Resistor 0.25 Ω
47k
2
R6, R7
Potentiometer
11-20k
1
R8
Light dependent resistor
3.3k
1
R9
Resistor 0.25 Ω
4.7M
1
R10
Resistor 0.25 Ω
100k
1
R11
Resistor 0.25 Ω
47k
1
R12
Resistor 0.25 Ω
0
1
SH1
Shortcut connector
7 References
For more information, see the appropriate device reference manual and the documents in the following table.
Table 2. References
Document
Title
Freescale document DRM001
Passive Infrared (PIR) Intruder Detection Using the
MC68HC908JK1/3
Freescale document MC9RS08KA2
MC9RS08KA2/MC9RS08KA1 Data Sheet
(Also serves as reference manual)
Freescale document AN3587
Cloth Iron Controlled by MC9RS08KA2
Wikipedia article on PIR
(en.wikipedia.org/wiki/Passive_infrared_sensor)
Passive infrared sensor
Table continues on the next page...
Low-Cost Passive IR Sensing with RS08KA, Rev. 0, August 2011
20
Freescale Semiconductor, Inc.
References
Table 2. References (continued)
Document
PerkinElmer document LHI778
Title
Pyroelectric Dual Element Detectors For Motion Sensing
(http://www.perkinelmer.com/PDFs/Downloads/
DTS_LHi778_LHi878_PYD1388.pdf)
Low-Cost Passive IR Sensing with RS08KA, Rev. 0, August 2011
Freescale Semiconductor, Inc.
21
How to Reach Us:
Home Page:
www.freescale.com
Web Support:
http://www.freescale.com/support
USA/Europe or Locations Not Listed:
Freescale Semiconductor
Technical Information Center, EL516
2100 East Elliot Road
Tempe, Arizona 85284
+1-800-521-6274 or +1-480-768-2130
www.freescale.com/support
Europe, Middle East, and Africa:
Freescale Halbleiter Deutschland GmbH
Technical Information Center
Schatzbogen 7
81829 Muenchen, Germany
+44 1296 380 456 (English)
+46 8 52200080 (English)
+49 89 92103 559 (German)
+33 1 69 35 48 48 (French)
www.freescale.com/support
Japan:
Freescale Semiconductor Japan Ltd.
Headquarters
ARCO Tower 15F
1-8-1, Shimo-Meguro, Meguro-ku,
Tokyo 153-0064
Japan
0120 191014 or +81 3 5437 9125
support.japan@freescale.com
Asia/Pacific:
Freescale Semiconductor China Ltd.
Exchange Building 23F
No. 118 Jianguo Road
Chaoyang District
Beijing 100022
China
+86 10 5879 8000
support.asia@freescale.com
For Literature Requests Only:
Freescale Semiconductor Literature Distribution Center
1-800-441-2447 or +1-303-675-2140
Fax: +1-303-675-2150
LDCForFreescaleSemiconductor@hibbertgroup.com
Document Number: AN4305
Rev. 0, August 2011
Information in this document is provided solely to enable system and software
implementers to use Freescale Semiconductors products. There are no express or implied
copyright licenses granted hereunder to design or fabricate any integrated circuits or
integrated circuits based on the information in this document.
Freescale Semiconductor reserves the right to make changes without further notice to any
products herein. Freescale Semiconductor makes no warranty, representation, or
guarantee regarding the suitability of its products for any particular purpose, nor does
Freescale Semiconductor assume any liability arising out of the application or use of any
product or circuit, and specifically disclaims any liability, including without limitation
consequential or incidental damages. "Typical" parameters that may be provided in
Freescale Semiconductor data sheets and/or specifications can and do vary in different
applications and actual performance may vary over time. All operating parameters,
including "Typicals", must be validated for each customer application by customer's
technical experts. Freescale Semiconductor does not convey any license under its patent
rights nor the rights of others. Freescale Semiconductor products are not designed,
intended, or authorized for use as components in systems intended for surgical implant
into the body, or other applications intended to support or sustain life, or for any other
application in which failure of the Freescale Semiconductor product could create a
situation where personal injury or death may occur. Should Buyer purchase or use
Freescale Semiconductor products for any such unintended or unauthorized application,
Buyer shall indemnify Freescale Semiconductor and its officers, employees, subsidiaries,
affiliates, and distributors harmless against all claims, costs, damages, and expenses, and
reasonable attorney fees arising out of, directly or indirectly, any claim of personal injury
or death associated with such unintended or unauthorized use, even if such claims alleges
that Freescale Semiconductor was negligent regarding the design or manufacture of
the part.
RoHS-compliant and/or Pb-free versions of Freescale products have the functionality and
electrical characteristics as their non-RoHS-complaint and/or non-Pb-free counterparts.
For further information, see http://www.freescale.com or contact your Freescale
sales representative.
For information on Freescale's Environmental Products program, go to
http://www.freescale.com/epp.
Freescale™ and the Freescale logo are trademarks of Freescale Semiconductor, Inc.
All other product or service names are the property of their respective owners.
© 2011 Freescale Semiconductor, Inc.