Fourier Series, Fourier Transforms, and Periodic Response
advertisement

Fourier Series, Fourier Transforms, and
Periodic Response to Periodic Forcing
CEE 541. Structural Dynamics
Department of Civil and Environmental Engineering
Duke University
Henri P. Gavin
Fall, 2014
This document describes methods to analyze the steady-state forced-response of single
degree of freedom (SDOF) systems to general periodic loading. The analysis is carried out
using Fourier series representation of the periodic external forcing and the resulting periodic
steady-state response.
1 Fourier Series for Real-Valued Functions
Any real-valued function, f (t), that is:
• periodic, with period T ,
· · · = f (t − 2T ) = f (t − T ) = f (t) = f (t + T ) = f (t + 2T ) = · · ·
• square-integrable
Z T
f 2 (t)dt < ∞.
0
may be represented as a series expansion of sines and cosines, in a Fourier series,
∞
∞
X
2πqt X
2πqt
1
ˆ
aq cos
bq sin
+
,
f (t; a, b) = a0 +
2
T
T
q=1
q=1
(1)
where the Fourier coefficients, aq and bq are given by the Fourier integrals,
2ZT
2πqt
f (t) cos
dt ,
T 0
T
2ZT
2πqt
f (t) sin
dt ,
=
T 0
T
aq =
q = 1, 2, . . .
(2)
bq
q = 1, 2, . . .
(3)
The Fourier series fˆ(t; a, b) is a least-squares fit to the function f (t). This may be shown
by first defining
the error function, e(t) = f (t) − fˆ(t; a, b), the quadratic error criterion,
RT 2
J(a, b) = 0 e (t)dt, and finding the Fourier coefficients by solving the linear equations
resulting from minimizing J(a, b) with respect to the coefficients a and b. (by setting
∂J(a, b)/∂a and ∂J(a, b)/∂b equal to zero). So doing,
J(a, b) =
Z T
2
f (t) − fˆ(t; a, b)
dt
0
=
Z T
0
f 2 (t) − 2f (t)fˆ(t; a, b) + fˆ2 (t; a, b) dt.
(4)
2
CEE 541. Structural Dynamics – Duke University – Fall 2014 – H.P. Gavin
Setting ∂J/∂a0 equal to zero results in
Z T
i
∂ h 2
f (t) − 2f (t)fˆ(t; a, b) + fˆ2 (t; a, b) dt
0 ∂a0
Z T
Z T
∂ ˆ
∂ ˆ
fˆ(t; a, b)
f (t; a, b)dt + 2
f (t; a, b)dt
= −2
f (t)
∂a0
∂a0
0
0
0 =
= −2
Z T
0
= −
Z T
1
f (t) · dt + 2
2
f (t)dt +
0
0
= −
Z T
0
Z T
Z T
0
∞
X
∞
X
1
2πqt
2πqt 1
a0 +
aq cos
+
bq sin
· dt
2
T
T
2
q=1
q=1
Z T
Z T
∞
∞
X
X
1
2πqt
2πqt
cos
sin
a0 dt +
aq
dt +
bq
dt
2
T
T
0
0
q=1
q=1
∞
∞
X
X
1
f (t)dt + a0 T +
aq · 0 +
bq · 0
2
q=1
q=1
From which,
2ZT
a0 =
f (t) dt.
T 0
(5)
Note here that (a0 /2) is the average value of f (t).
Proceeding with the rest of the a coefficients, setting ∂J(a, b)/∂ak equal to zero results in
Z T
i
∂ h 2
f (t) − 2f (t)fˆ(t; a, b) + fˆ2 (t; a, b) dt
0 ∂ak
Z T
Z T
∂ ˆ
∂ ˆ
f (t; a, b)dt + 2
fˆ(t; a, b)
f (t; a, b)dt
= −2
f (t)
∂ak
∂ak
0
0
0 =
= −
Z T
0
= −
Z T
0
= −
0
Z T
0
= −
Z T
0
2πkt
dt +
T
Z T
Z T
∞
∞
X
X
2πqt
2πqt
2πkt
2πqt
2πkt
cos
dt +
aq
cos
cos
dt +
bq
sin
cos
dt
T
T
T
T
T
0
0
q=1
q=1
f (t) cos
a0 Z T
2
Z T
∞
∞
X
2πkt
2πqt X
2πqt
2πkt
a
0 +
f (t) cos
aq cos
bq sin
cos
dt +
+
dt
T
2
T
T
T
0
q=1
q=1
Z T
∞
X
a0
2πkt
2 2πkt
f (t) cos
dt +
· 0 + ak
cos
dt +
bq · 0
T
2
T
0
q=1
f (t) cos
T
2πkt
dt + 0 + ak · + 0
T
2
From which,
ak =
2ZT
2πkt
f (t) cos
dt.
T 0
T
(6)
In a completely similar fashion, ∂J(a, b)/∂bk = 0 results in
2ZT
2πkt
bk =
f (t) sin
dt.
T 0
T
(7)
CC BY-NC-ND H.P. Gavin
3
Fourier Series and Periodic Response to Periodic Forcing
The derivation of the Fourier integrals (equations (5), (6), and (7)) make use of orthogonality
properties of sine and cosine functions.
Z T
nπt
dt
sin
T
0
Z T
nπt
cos2
dt
T
0
Z T
nπt
mπt
sin
sin
dt
T
T
0
Z T
nπt
mπt
cos
cos
dt
T
T
0
Z T
nπt
mπt
sin
cos
dt
T
T
0
2
T
,
2
T
,
=
2
=
n = 1, 2, · · ·
n = 1, 2, · · ·
= 0,
n 6= m ,
n, m = 1, 2, · · ·
= 0,
n 6= m ,
n, m = 1, 2, · · ·
= 0,
n 6= m ,
n, m = 1, 2, · · ·
1.1 The complex exponential form of Fourier series
Recall the trigonometric identities for complex exponentials, eiθ = cos θ +i sin θ. Defining
the complex scalar F as F = 21 (a − ib), and its complex conjugate, F ∗ as F ∗ = 12 (a + ib), it
is not hard to show that
F eiθ + F ∗ e−iθ = a cos θ + b sin θ.
(8)
Note that the left hand side of equation (8) is the sum of complex conjugates, and that the
right hand side is the sum of real values. So complex conjugates can be used to express the
real Fourier series given in equation (1). Substituting equation (8) into equation (1),
∞
X
2πqt
1
2πqt
ˆ
aq cos
a0 +
+ bq sin
f (t; a, b) =
2
T
T
q=1
=
∞
X
1
1
2πq
1
2πq
a0 +
(aq − ibq ) exp i
t + (aq + ibq ) exp −i
t
2
T
2
T
q=1 2
=
∞
∞
X
X
1
2πq
2πq
a0 +
Fq exp i
t +
Fq∗ exp −i
t
2
T
T
q=1
q=1
∞
−1
X
X
2πq
2πq
1
∗
a0 +
Fq exp i
t +
F−q
exp i
t
=
2
T
T
q=−∞
q=1
∞
X
∞
X
2πq
=
Fq exp i
t =
Fq eiωq t
T
q=−∞
q=−∞
(9)
∗
where the Fourier frequency ωq is 2πq/T , F0 = 12 a0 , Fq = 12 (aq − ibq ), and F−q
= Fq . The
∗
condition F−q = Fq holds for the Fourier series of any real-valued function that is periodic
CC BY-NC-ND H.P. Gavin
4
CEE 541. Structural Dynamics – Duke University – Fall 2014 – H.P. Gavin
and integrable. Going the other way,
fˆ(t; F) =
q=+∞
X
Fq eiωq t
q=−∞
= F0 +
q=−1
X
iωq t
Fq e
+
q=−∞
= F0 +
q=+∞
X
q=+∞
X
q=1
F−q e−iωq t +
q=+∞
X
q=1
= F0 +
= F0 +
= F0 +
∞ h
X
q=1
∞ h
X
q=1
∞ h
X
Fq eiωq t
Fq eiωq t
q=1
Fq eiωq t + F−q e−iωq t
i
i
(Fq0 + iFq00 ) (cos ωq t + i sin ωq t) + (Fq0 − iFq00 ) (cos ωq t − i sin ωq t)
i
2Fq0 cos ωq t − 2Fq00 sin ωq t
q=1
So, the real part of Fq , Fq0 , is half of aq , the imaginary part of Fq , Fq00 , is half of −bq , and
∗
. The real Fourier coefficients, aq , are even about q = 0 and the imaginary Fourier
Fq = F−q
coefficients, bq , are odd about q = 0.
Just as the Fourier expansion may be expressed in terms of complex exponentials, the
coefficients Fq may also be written in this form.
1
2πq
1ZT
2πq
Fq = (aq − ibq ) =
f (t) cos
t − i sin
t
2
T 0
T
T
2πq
1ZT
f (t) exp −i
=
t dt
T 0
T
(10)
Since the integrand, f (t)e−iωq t , of the Fourier integral is periodic in T , the limits of integration
can be shifted arbitrarily without affecting the resulting Fourier coefficients.
Z T
0
−iωq t
f (t)e
dt =
Z τ
−iωq t
f (t)e
dt +
Z T +τ
−iωq t
f (t)e
dt −
τ
0
Z T +τ
f (t)e−iωq t dt.
T
But, since the integrand is periodic in T ,
Z τ
−iωq t
f (t)e
dt =
Z T +τ
f (t)e−iωq t dt .
T
0
So, the interval of integration can be shifted arbitrarily.
Z T
0
f (t)e−iωq t dt =
Z T +τ
f (t)e−iωq t dt.
0+τ
On the other hand, shifting the function in time, affects the relative values of aq and bq
(i.e.,
the phase the the complex coefficeint Fq ), but does not affect the magnitude, |Fq | =
q
P
1
−iωq t
2 + b2 . If fˆ(t) =
ˆ(t + τ ) = P Fq e−iωq (t+τ ) = P (Fq e−iωq τ ) e−iωq t , and
a
F
e
,
then
f
q
q
q
2
|Fq | = |Fq e−iωq τ |.
CC BY-NC-ND H.P. Gavin
5
Fourier Series and Periodic Response to Periodic Forcing
2 Fourier Integrals in Maple
The Fourier integrals for real valued functions (equations (6) and (7)) can be evaluated
using symbolic math software, such as Maple or Mathematica.
2.1 a periodic square wave function: f (t) = sgn(t) on −π < t < π and f (t) = f (t + n(2π))
> assume (k::integer);
>
f := signum(t);
> ak := (2/(2*Pi)) * int(f*cos(2*Pi*k*t/(2*Pi)),t=-Pi..Pi);
ak := 0
>
bk := (2/(2*Pi)) * int(f*sin(2*Pi*k*t/(2*Pi)),t=-Pi..Pi);
k˜
2 ((-1)
- 1)
bk := - -------------Pi k˜
2.2 a periodic sawtooth function: f (t) = t on −π < t < π and f (t) = f (t + n(2π))
> assume (k::integer);
> f := t;
> ak := (2/(2*Pi)) * int(f*cos(2*Pi*k*t/(2*Pi)),t=-Pi..Pi);
ak := 0
> bk := (2/(2*Pi)) * int(f*sin(2*Pi*k*t/(2*Pi)),t=-Pi..Pi);
(1 + k˜)
2 (-1)
bk := -------------k˜
2.3 a periodic triangle function: f (t) = π/2 − t sgn(t) on −π < t < π and f (t) = f (t + n(2π))
> assume (k::integer);
> f := Pi/2 - t * signum(t);
> ak := (2/(2*Pi)) * int(f*cos(2*Pi*k*t/(2*Pi)),t=-Pi..Pi);
k˜
2 ((-1)
- 1)
ak := - -------------2
Pi k˜
>
bk := (2/(2*Pi)) * int(f*sin(2*Pi*k*t/(2*Pi)),t=-Pi..Pi);
bk := 0
CC BY-NC-ND H.P. Gavin
6
CEE 541. Structural Dynamics – Duke University – Fall 2014 – H.P. Gavin
3 Fourier Transforms
Recall for periodic functions of period, T , the Fourier series expansion may be written
f (t) =
q=∞
X
Fq eiωq t ,
(11)
q=−∞
where the Fourier coefficients, Fq , have the same units as f (t), and are given by the Fourier
integral,
1 Z T /2
Fq =
f (t) e−iωq t dt ,
(12)
T −T /2
in which the limits of integration have been shifted by τ = −T /2.
Now, consider a change of variables, by defining a frequency increment, ∆ω, and a scaled
amplitude, F (ωq ).
2π
(ωq = q ∆ω)
T
2π
∆
F (ωq ) = T Fq =
Fq
∆ω
∆
∆ω = ω1 =
(13)
(14)
Where the scaled amplitude, F (ωq ), has units of f (t) · t or f (t)/ω.
Using these new variables,
X
1 q=∞
f (t) =
F (ωq ) eiωq t ∆ω ,
2π q=−∞
F (ωq ) =
Z T /2
f (t) e−iωq t dt .
P
→
1 Z∞
F (ω) eiωt dω ,
2π Z −∞
∞
F (ω) =
(16)
−T /2
Finally, taking the limit as T → ∞, implies ∆ω → dω and
f (t) =
(15)
f (t) e−iωt dt .
R
(17)
(18)
−∞
These expressions are the famous Fourier transform pair. Equation (17) is commonly called
the inverse Fourier transform and equation (18) is commonly called the forward Fourier
transform. They differ only by the sign of the exponent and the factor of 2π.
CC BY-NC-ND H.P. Gavin
7
Fourier Series and Periodic Response to Periodic Forcing
4 Fourier Approximation
Any periodic function may be approximated as a truncated series expansion of sines and
cosines, as a Fourier series,
Q
Q
X
2πqt X
2πqt
1
aq cos
+
bq sin
,
f˜(t) = a0 +
2
T
T
q=1
q=1
(19)
where the Fourier coefficients, aq and bq may be found by solving the Fourier integrals,
aq
bq
2 Z T /2
2πqt
=
f (t) cos
dt ,
T −T /2
T
2 Z T /2
2πqt
=
f (t) sin
dt ,
T −T /2
T
q = 1, 2, . . . , Q
(20)
q = 1, 2, . . . , Q
(21)
The Fourier approximation (19) may also be represented using complex exponential notation.
f˜(t) =
q=Q
X
Fq eiωq t =
q=−Q
X
1 q=Q
F (ωq ) eiωq t
T q=−Q
(22)
∗
where eiωq t = cos ωq t + i sin ωq t, ωq = 2πq/T , Fq = 12 (aq − ibq ), Fq = F−q
, and
1 Z T /2
f (t) e−iωq t dt .
Fq =
T −T /2
(23)
The accuracy of Fourier approximations of non-sinusoidal functions increases with the
number of terms, Q, in the series. Especially for time series that are discontinuous in time,
such as square-waves or saw-tooth waves, Fourier approximations, f˜(t), will contain a degree
of over-shoot at the discontinuity and will oscillate about the approximated function f (t).
This is called Gibb’s phenomenon. In section 7 we illustrate this effect for square waves and
triangle waves.
5 Discrete Fourier Transform
If the function f (t) is represented by N uniformly-spaced points in time, tn = (n)(∆t),
(n = 0, · · · , N −1), the N Fourier coefficients are computed by the discrete Fourier transform,
−1
2πqn
1 NX
,
f (tn ) · exp −i
Fq =
N n=0
N
q = [−N/2 + 1, · · · , −2, −1, 0, 1, · · · , N/2]
(24)
and the N -point discrete Fourier approximation is computed by the inverse discrete Fourier
transform,
N/2
X
2πqn
f (tn ) =
Fq · exp i
(25)
N
q=−N/2+1
With the normalization given in equations (24) and (25), N1 fn2 = |Fq |2 . By convention,
in the fast Fourier transform (FFT) the factor (1/N ) is applied to equation (25) instead of
equation (24). Also, by convention, the Fourier frequencies, ωq = 2πq/T are sorted as follows:
q = 0, 1, · · · , N/2, −N/2 + 1, · · · , −2, −1. The lowest positve frequency in the FFT is 1/T
Hertz, and the highest frequency is 1/(2∆t) Hertz, which is called the Nyquist frequency.
P
P
CC BY-NC-ND H.P. Gavin
8
CEE 541. Structural Dynamics – Duke University – Fall 2014 – H.P. Gavin
6 Fourier Series and Periodic Responses of Dynamic Systems
The response of a system described by a frequency response function H(ω) to arbitrary
periodic forces described by a Fourier series may be found in the frequency domain, or in the
time domain.
Complex exponential notation allows us to directly determine the steady-state periodic
response to general periodic forcing, in terms of both the magnitude of the response and the
phase of the response. Recall the relationship between the complex magnitudes X and F for
a sinusoidally-driven spring-mass-damper oscillator is
Xq = H(ωq ) Fq =
1
(k −
mωq2 )
+ i(cωq )
(26)
Fq
The function H(ω) is called the frequency response function for the dynamic system relating
the input f (t) to the output x(t).
Because the oscillator is linear, if the response to f1 (t) is x1 (t), and the response to f2 (t)
is x2 (t), then the response to c1 f1 (t) + c2 f2 (t) is c1 x1 (t) + c2 x2 (t). More generally, then,
x(t) =
q=∞
X
q=−∞
H(ωq ) Fq e
iωq t
=
q=∞
X
q=−∞ (k −
1
mωq2 )
+ i(cωq )
Fq eiωq t
(27)
where ωq = 2πq/T .
q
Note that ωq is not the same symbol as ωn . The natural frequency, k/m, has the symbol
ωn . The symbol ωq = 2πq/T is the frequency of a component of a periodic forcing function
of period T .
For this frequency response function H(ω), the series expansion for the response x(t)
converges with fewer terms than the Fourier series for the external forcing, because |H(ωq )|
decreases as 1/ωq2 .
CC BY-NC-ND H.P. Gavin
9
Fourier Series and Periodic Response to Periodic Forcing
7 Examples
In the following examples, the external forcing is periodic with a period, T , of 2π (seconds). For functions periodic in 2π seconds, the frequency increment in the Fourier series is
1 radian/second. In this case, the frequency index number, q, is also the frequency, ωq , in
radians per second, otherwise, ωq = 2πq/T .
The system is a forced spring-mass-damper oscillator,
ẍ(t) + 2ζωn ẋ(t) + ωn2 x(t) =
1 ext
f (t) .
m
(28)
The complex-valued frequency response function from the external force, f ext (t), to the response displacement, x(t), is given by
1/ωn2
H(ω) =
,
1 − Ω2 + i 2ζΩ
(29)
where Ω is the frequency ratio, ω/ωn ,
In the following three numerical examples, ωn = 10 rad/s, ζ = 0.1, m = 1 kg, and
Q = 16 terms. The three examples consider external forcing in the form of a square-wave, a
sawtooth-wave, and a triangle-wave. In each example six plots are provided.
In the (a) plots, the solid line represents the exact form of f (t), the dashed lines represent
the real-valued form of the Fourier approximation and the complex-valued form of the Fourier
approximation, and the circles represent 2Q sample points of the function f (t) for use in fast
Fourier transform (FFT) computations. The two dashed lines are exactly equal.
In the (b) plots, the impulse-lines show the values of the Fourier coefficients, Fq , found by
evaluating the Fourier integral, equation (23), and the circles represent the Fourier coefficients
returned by the FFT.
In the (c) plots, the red solid lines show the cosine terms of the Fourier series and the
blue dashed lines show the sine terms of the Fourier series.
The (d) and (f) plots show the magnitude and phase of the transfer function, H(ω) as a
solid line, the Fourier coefficients, Fq , as the green circles, and H(ωq )Fq as the blue circles.
In the (e) plots, the solid line represents x(t) as computed using equation (27), the circles
represent the real part of the result of the inverse FFT calculation and the dots represent
the imaginary part of the result of the inverse FFT calculation.
The numerical details involved in the correct representation of periodic functions and
frequency indexing for FFT computations are provided in the attached Matlab code.
CC BY-NC-ND H.P. Gavin
10
CEE 541. Structural Dynamics – Duke University – Fall 2014 – H.P. Gavin
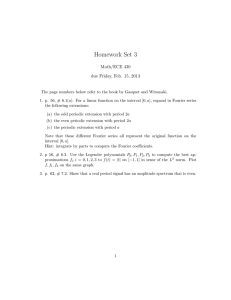
7.1 Example 1: square wave
The external forcing is given by
f ext (t) = sgn(t) ;
−π < t < π
(30)
The Fourier coefficients for the real-valued Fourier series are:
aq = 0 and bq = −(2/(qπ)) (−1q − 1).
1.5
0
-0.1
Fourier coefficients, Fq, (N)
function, f(t), (N)
1
0.5
0
-0.5
-1
-0.2
-0.3
-0.4
-0.5
-0.6
-1.5
-0.7
-3
-2
-1
(a)
0
1
2
3
0
(b)
time, t, (s)
2
4
6
8
10
12
14
16
frequency, ω, (rad/s)
1
1.5
0.1
frequency response
cosine and sine terms
1
0.5
0
-0.5
0.01
0.001
-1
1e-04
-1.5
-3
-2
-1
(c)
0
1
2
0
3
(d)
time, t, (s)
2
4
6
8
10
12
14
16
12
14
16
frequency, ω, (rad/s)
200
0.025
0.02
150
phase lead, (degrees)
0.015
response, x, (m)
0.01
0.005
0
-0.005
-0.01
100
50
0
-50
-100
-0.015
-150
-0.02
-200
-0.025
(e)
-3
-2
-1
0
time, t, (s)
1
2
3
(f)
0
2
4
6
8
10
frequency, ω, (rad/s)
Figure 1. (a): — = f ext (t); - - = f˜ext (t). (b): red solid = <(Fq ); blue dashed = =(Fq );
*: Fq from FFT. (c): red solid = component cosine terms, blue dashed = component sine terms.
(d): — : |H(ω)|; *: |Fq | and |H(ωq )Fq |. (e): — : x(t); *: x(t) from IFFT; · · · : =(x(t)) from
IFFT. (f): — : phase of H(ω); *: phase of Fq and H(ωq )Fq .
CC BY-NC-ND H.P. Gavin
11
Fourier Series and Periodic Response to Periodic Forcing
7.2 Example 2: sawtooth wave
The external forcing is given by
f ext (t) = t ;
−π < t < π
(31)
The Fourier coefficients for the real-valued Fourier series are:
aq = 0 and bq = −(2/q) (−1q ).
0.6
3
0.4
Fourier coefficients, Fq, (N)
4
function, f(t), (N)
2
1
0
-1
-2
-3
0.2
0
-0.2
-0.4
-0.6
-0.8
-4
-1
-3
-2
-1
(a)
0
1
2
3
0
(b)
time, t, (s)
2
4
6
8
10
12
14
16
frequency, ω, (rad/s)
1
2
0.1
1
frequency response
cosine and sine terms
1.5
0.5
0
-0.5
0.01
0.001
-1
-1.5
1e-04
-2
-3
-2
-1
(c)
0
1
2
0
3
(d)
time, t, (s)
6
8
10
12
14
16
12
14
16
150
100
phase lead, (degrees)
0.02
response, x, (m)
4
frequency, ω, (rad/s)
0.04
0
-0.02
-0.04
-0.06
50
0
-50
-100
-150
-200
-0.08
(e)
2
-3
-2
-1
0
time, t, (s)
1
2
3
(f)
0
2
4
6
8
10
frequency, ω, (rad/s)
Figure 2. (a): — = f ext (t); - - = f˜ext (t). (b): red solid = <(Fq ); blue dashed = =(Fq );
*: Fq from FFT. (c): red solid = component cosine terms, blue dashed = component sine terms.
(d): — : |H(ω)|; *: |Fq | and |H(ωq )Fq |. (e): — : x(t); *: x(t) from IFFT; · · · : =(x(t)) from
IFFT. (f): — : phase of H(ω); *: phase of Fq and H(ωq )Fq .
CC BY-NC-ND H.P. Gavin
12
CEE 541. Structural Dynamics – Duke University – Fall 2014 – H.P. Gavin
7.3 Example 3: triangle wave
The external forcing is given by
f ext (t) = π/2 − t sgn(t) ;
−π < t < π
(32)
The Fourier coefficients for the real-valued Fourier series are:
aq = −(2/q 2 π)(−1q − 1) and bq = 0.
0.7
0.6
Fourier coefficients, Fq, (N)
2
1.5
function, f(t), (N)
1
0.5
0
-0.5
-1
-1.5
-2
-2
-1
0
1
2
0.2
0.1
3
0
(b)
time, t, (s)
2
4
6
8
10
12
14
16
frequency, ω, (rad/s)
1
1.5
1
0.1
frequency response
cosine and sine terms
0.3
-0.1
-3
0.5
0
-0.5
0.01
0.001
1e-04
-1
1e-05
-1.5
-3
-2
-1
(c)
0
1
2
0
3
(d)
time, t, (s)
0.02
200
0.015
150
0.01
100
0.005
0
-0.005
2
4
6
8
10
12
14
16
12
14
16
frequency, ω, (rad/s)
phase lead, (degrees)
response, x, (m)
0.4
0
(a)
50
0
-50
-0.01
-100
-0.015
-150
-200
-0.02
(e)
0.5
-3
-2
-1
0
time, t, (s)
1
2
3
(f)
0
2
4
6
8
10
frequency, ω, (rad/s)
Figure 3. (a): — = f ext (t); - - = f˜ext (t). (b): red solid = <(Fq ); blue dashed = =(Fq );
*: Fq from FFT. (c): red solid = component cosine terms, blue dashed = component sine terms.
(d): — : |H(ω)|; *: |Fq | and |H(ωq )Fq |. (e): — : x(t); *: x(t) from IFFT; · · · : =(x(t)) from
IFFT. (f): — : phase of H(ω); *: phase of Fq and H(ωq )Fq .
CC BY-NC-ND H.P. Gavin
13
Fourier Series and Periodic Response to Periodic Forcing
7.4 Matlab code
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
function [ Fq , wq ,x , t ] = Fourier (type ,Q , wn , z )
% [ F , w , x ] = F o u r i e r ( t y p e ,Q, wn , z )
% Compute t h e F o u r i e r s e r i e s c o e f f i c i e n t s o f a p e r i o d i c s i g n a l , f ( t ) ,
% i n two d i f f e r e n t ways :
% ∗ complex e x p o n e n t i a l e x p a n s i o n
( i . e . , s i n e and c o s i n e e x p a n s i o n )
% ∗ f a s t Fourier transform
%
% The ’ t y p e ’ o f p e r i o d i c s i g n a l may be
%
’ s q u a r e ’ a s q u a r e wave
%
’ s a w t o o t h ’ a saw−t o o t h wave
%
’ t r i a n g l e ’ a t r i a n g l e wave
%
% The p e r i o d o f t h e s i g n a l , f ( t ) , i s f i x e d a t 2∗ p i ( se c o nd ) .
%
% The number o f F o u r i e r s e r i e s c o e f f i c i e n t s i s i n p u t as Q.
% This r e s u l t s i n a 2∗Q F o u r i e r t r a n s f o r m c o e f f i c i e n t s .
%
% The F o u r i e r a p p r o x i m a t i o n i s t h e n used t o compute t h e s t e a d y −s t a t e
% r e s p o n s e o f a s i n g l e d e g r e e o f freedom (SDOF) o s c i l l a t o r , d e s c r i b e d by
%
%
2
% x ” ( t ) + 2 z wn x ’ ( t ) + wn x ( t ) = f ( t ) ,
%
% where t h e mass o f t h e sy s te m i s f i x e d a t 1 ( kg ) .
%
% s e e : h t t p : / / en . w i k i p e d i a . o r g / w i k i / F o u r i e r s e r i e s
%
h t t p : / /www. j h u . edu /˜ s i g n a l s / f o u r i e r 2 / i n d e x . html
%
29
30
31
32
33
i f nargin < 4
help Fourier
return
end
34
35
36
T = 2* pi ;
% period of external forcing , s
37
38
39
a
b
= zeros (1 , Q );
= zeros (1 , Q );
% c o e f f i c i e n t s of cosine part of Fourier s e r i e s
% c o e f f i c i e n t s of
sine part of Fourier s e r i e s
40
41
42
q = [1: Q ];
wq = 2* pi * q / T ;
% p o s i t i v e frequency index value
% p o s i t i v e f r e q u e n c y v a l u e s , rad / sec ,
dt = T /(2* Q );
ts = [ - Q :Q -1]* dt ;
% 2Q d i s c r e t e p o i n t s i n time f o r FFT s a m p l i n g
% 2Q d i s c r e t e p o i n t s i n time f o r FFT s a m p l i n g
eq ’ n ( 1 3 )
43
44
45
46
47
48
49
50
51
52
% ” s h i f t e d ” time . . . −T/2 <= t < T/2 . . .
% t s (1)
= −Q∗ d t
= −T/2
= −p i
. . . f (−T/2) = f (T/2) by e x t e n s i o n
% t s (Q)
= −d t
= −T/(2∗Q) = −p i /Q
% t s (Q+1) =
0
. . . f (0)
= f (T)
by e x t e n s i o n
% t s (Q+2) = d t
= T/(2∗Q) = p i /Q
% t s (2∗Q) = (Q−1)∗ d t = T/2 − d t = p i − p i /Q
53
54
55
P = 128; % number o f p o i n t s i n t h e time−r e c o r d ( f o r p l o t t i n g p u r p o s e s o n l y )
t = [ - P : P ]* T /2/ P ;
% time a x i s
56
57
58
% =======================================================================
% Fourier s e r i e s approximation of general p e r i o d i c f u n c t i o n s
59
60
61
62
% s i n ( q ∗ p i ) = 0 , c o s ( q ∗ p i ) = ( −1).ˆ q
% f t r u e i s used o n l y f o r p l o t t i n g
% f samp i s used i n FFT c o m p u t a t i o n s
63
64
65
66
67
68
69
70
i f strcmp( type , ’ square ’ )
% s q u a r e wave
b = - 2./( q * pi ) .* (( -1).ˆ q - 1);
f_true = sign ( t );
f_true (1) = 0; f_true (2* P +1) = 0;
f_samp = sign ( ts );
f_samp (1) = 0;
% g e t p e r i o d i c i t y r i g h t , f (− p i ) = 0
CC BY-NC-ND H.P. Gavin
14
71
CEE 541. Structural Dynamics – Duke University – Fall 2014 – H.P. Gavin
end
72
73
74
75
76
77
78
i f strcmp( type , ’ sawtooth ’ )
% s a w t o o t h wave
b = -(2./ q ) .* ( -1).ˆ q ;
f_true = t ;
f_true (1) = 0; f_true (2* P +1) = 0;
f_samp = ts ;
f_samp (1) = 0;
% g e t p e r i o d i c i t y r i g h t , f (− p i ) = 0
end
79
80
81
82
83
84
i f strcmp( type , ’ triangle ’ )
a = -(2./( pi * q .ˆ2)) .* ( ( -1).ˆ q - 1 );
f_true = pi /2 - t .* sign ( t );
f_samp = pi /2 - ts .* sign ( ts );
end
% t r i a n g l e wave
f_approxR = a * cos (q ’* t ) + b * s i n (q ’* t );
% r e a l Fourier s e r i e s
Fq = ( a - i * b )/2;
% complex F o u r i e r c o e f f i c i e n t s
85
86
87
88
89
90
91
92
% Complex F o u r i e r s e r i e s ( p o s i t i v e and n e g a t i v e e x p o n e n t s )
f_approxC = Fq * exp( i * wq ’* t ) + conj ( Fq ) * exp( - i * wq ’* t );
93
94
95
96
% The i m a g n i a r y p a r t o f t h e complex F o u r i e r s e r i e s i s e x a c t l y z e r o !
i m a g _ o v e r _ re al _ 1 = max(abs(imag( f_approxC ))) / max(abs( r e a l ( f_approxC )))
97
98
99
100
101
102
103
%
%
%
%
%
The f a s t F o u r i e r t r a n s f o r m (FFT) method
In Matlab , t h e f o r w a r d F o u r i e r t r a n s f o r m has a n e g a t i v e e x p o n e n t .
According t o a c o n v e n t i o n o f t h e FFT method , i n d e x number 1 i s f o r time = d t
t s ( 1 ) = −Q∗ d t = −T/2 ; t s (Q) = −d t ; t s (Q+1)=0 ; t s (2∗Q) = (Q−1)∗ d t = T/2− d t
. . . s e e t h e t a b l e a t t h e end o f t h i s f i l e .
104
105
F_FFT = f f t ( [ f_samp ( Q +1:2* Q ) f_samp (1: Q ) ] ) / (2* Q );
% Fourier coeff ’ s
106
107
108
% c o e f = [ Fq ’ F FFT ( 2 :Q+1) ’ ]
% d i s p l a y the Fourier c o e f f i c i e n t s
109
110
% −−−−−−−− P l o t t i n g −−−−−−−−−−−
111
112
113
114
115
116
117
118
119
120
121
122
f i g u r e (1);
plot (t , f_true , ’ -r ’ , ts , f_samp , ’* r ’ , t , f_approxR , ’ -c ’ , t , f_approxC , ’ -b ’ )
xlabel ( ’ time , t , ( s ) ’)
ylabel ( ’ function , f ( t ) , ( N ) ’)
axis (1.05*[ - pi , pi ])
legend ( ’ true ’ , ’ sampled ’ , ’ real Fourier approx ’ , ’ complex Fourier approx ’)
plot ( wq , r e a l ( Fq ) , ’ˆ r ’ , wq ,imag( Fq ) , ’ˆ b ’ , ...
wq , r e a l ( F_FFT (2: Q +1)) , ’* r ’ , wq ,imag( F_FFT (2: Q +1)) , ’* b ’ )
ylabel ( ’ Fourier coefficients , F ( w ) , ( N ) ’)
xlabel ( ’ frequency , {/ Symbol w } , ( rad / s ) ’)
legend ( ’ real ( F ) ’ , ’ imag ( F ) ’ , ’ real ( FFT ( f )) ’ , ’ imag ( FFT ( f )) ’)
123
124
125
126
127
128
129
f i g u r e (2);
plot (t ,a ’* ones (1 ,2* P +1).* cos (q ’* t ) , ’ -r ’ , t ,b ’* ones (1 ,2* P +1).* s i n (q ’* t ) , ’ -b ’ );
xlabel ( ’ time , t , ( s ) ’)
ylabel ( ’ cosine and sine terms ’)
axis (1.05*[ - pi , pi ])
130
131
132
133
% =======================================================================
% Steady−s t a t e r e s p o n s e o f a SDOF o s c i l l a t o r t o g e n e r a l p e r i o d i c f o r c i n g .
134
135
136
% Complex−v a l u e d f r e q u e n c y r e s p o n s e f u n c t i o n , H(w) , has u n i t s o f [m/N]
H = (1/ wn ˆ2) ./ ( 1 - ( wq / wn ).ˆ2 + 2* i * z *( wq / wn ) );
137
138
139
% Complex F o u r i e r s e r i e s ( p o s i t i v e and n e g a t i v e e x p o n e n t s )
x_approxC = ( H .* Fq ) * exp( i * wq ’* t ) + ( conj ( H ) .* conj ( Fq )) * exp( - i * wq ’* t );
140
141
% In Matlab , t h e i n v e r s e F o u r i e r t r a n s f o r m has a p o s i t i v e e x p o n e n t .
CC BY-NC-ND H.P. Gavin
15
Fourier Series and Periodic Response to Periodic Forcing
142
143
%
. . . s e e t h e t a b l e a t t h e end o f t h i s f i l e f o r t h e s o r t i n g c o n v e n t i o n .
x_FFT = i f f t ( [ (1/ wn ˆ2) , H , conj ( H (Q -1: -1:1)) ] .* F_FFT ) * (2* Q );
144
145
146
147
148
149
f i g u r e (3);
% p l o t frequency response functions
semilogy ( wq ,abs( Fq ) , ’* g ’ , wq ,abs( H ) , ’ -r ’ , wq ,abs( H .* Fq ) , ’* b ’ )
xlabel ( ’ frequency , {/ Symbol w } , ( rad / s ) ’)
ylabel ( ’ frequency response ’)
legend ( ’| F | ’ , ’| H | ’ , ’| H * F | ’)
150
plot ( wq , angle ( Fq )*180/ pi , ’* g ’ , wq , angle ( H )*180/ pi , ’ -r ’ , wq , angle ( H .* Fq )*180/ pi , ’* b ’)
xlabel ( ’ frequency , {/ Symbol w } , ( rad / s ) ’)
ylabel ( ’ phase lead , ( degrees ) ’)
151
152
153
154
155
156
157
158
159
160
161
f i g u r e (4);
% p l o t time r e s p o n s e
ts = [ ts ( Q +1:2* Q ) ts (1: Q ) ];
% re−s o r t t h e time a x i s
plot ( t , x_approxC , ’ -r ’ , ts , r e a l ( x_FFT ) , ’* b ’ , ts , imag( x_FFT ) , ’. b ’ )
axis (1.05*[ - pi , pi ])
xlabel ( ’ time , t , ( s ) ’)
ylabel ( ’ response , x , ( m ) ’)
legend ( ’x ( t ) - complex Fourier series ’ , ’ real ( x ( t )) - FFT ’ , ’ imag ( x ( t )) - FFT ’)
162
163
164
165
% The i m a g i n a r y p a r t i s e x a c t l y z e r o f o r t h e complex e x p o n e n t s e r i e s method !
i m a g _ o v e r _ rea l _ 2 = max(abs(imag( x_approxC ))) / max(abs( r e a l ( x_approxC )))
166
167
168
% The i m a g i n a r y p a r t i s p r a c t i c a l l y z e r o f o r t h e FFT method !
i m a g _ o v e r _ rea l _ 3 = max(abs(imag( x_FFT ))) / max(abs( r e a l ( x_FFT )))
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
%
%
%
%
%
%
%
%
%
%
%
%
%
%
%
%
%
%
%
%
%
%
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
SORTING o f t h e FFT c o e f f i c i e n t s
number o f d a t a p o i n t s = N = 2∗Q
note :
f max = 1/(2∗ d t ) ;
d f = f max /(N/2) = 1/(N∗ d t ) = 1/T;
index
time
frequency
=====
====
=========
1
0
0
2
dt
df
3
2∗ d t
2∗ d f
4
3∗ d t
3∗ d f
:
:
:
N/2−1
(N/2−2)∗ d t
f max −2∗ d f = ( N/2−2)∗ d f
N/2
(N/2−1)∗ d t
f max−d f
= ( N/2−1)∗ d f
N/2+1
(N/2)∗ d t
+/− f max
= ( N/2 ) ∗ d f
N/2+2
(N/2+1)∗ d t
−f max+d f
= (−N/2+1)∗ d f
N/2+3
(N/2+2)∗ d t
−f max+2∗ d f = (−N/2+2)∗ d f
:
:
:
:
N−2
(N−3)∗ d t
−3∗ d f
N−1
(N−2)∗ d t
−2∗ d f
N
(N−1)∗ d t
−d f
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
CC BY-NC-ND H.P. Gavin