Performance Investigation on Bilateral Filter with
advertisement

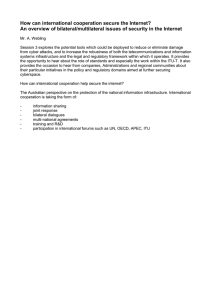
Performance Investigation on Bilateral Filter with Confidence Based over Spatial Correlation-based Optical Flow for Image Reconstruction Darun Kesrarat↑ and Vorapoj Patanavijit Abstract— Optical flow in image sequences gives essential data on motion structure. It is relevant in several areas such as robot vision, video coding, and super resolution reconstruction. Even though this realm has been concentrated for more than a decade, reduction the glitch in estimation stands a difficult trouble. Many techniques were proposed to enhance the performance and one of the most is bilateral filter. This paper presents the performance study of bilateral filter and bilateral filter together with confidence based over spatial correlationbased optical flow where the quality of the reconstructed images from the result of motion vector is highly focused. We perform an experiment over several standard sequences with several noise levels in contamination to study the robustness of each robust technique and used PSNR as an indicator. I. INTRODUCTION Optical flow is used to determine the motion vector (MV) of the movement sequences in a level of pixel based. Several areas such as motion tracking, video coding, image super resolution reconstruction, edge detection, and object segmentation use optical flow techniques in advance to archive the outcome. From the past decade, a lot of optical flow algorithms are proposed and this paper focuses on the achievement over spatial correlation based optical flow (SCOF) [1]. Under noisy condition, the performance of optical flow is dropped. There are many techniques were proposed to increasing the performance such as gradient orientation information [7] and confidence-based optical [2, 5, 6]. And one of the most techniques is bilateral filter [8,9,10]. Bilateral filer is a robust edge-preserving filter that was referenced in many computer vision and image processing. According to the performance investigation of D. Kesrarat and V. Patanavijit [3, 4] over confidence-based optical flow for high reliability [2], we found that it presented the performance upgraded over several model. Then, we also investigate the performance of bilateral filter in combination with this confidence based model. In our experiment, we address the performance investigation over different standard sequences with 3 simulated levels of Additive White Gaussian Noise (AWGN) (25, 20, and 15 dB) by using PSNR as a performance indicator. The rest of the ↑ Department of Information Technology, Vincent Mary School of Science and Technology, Assumption University, Bangkok, Thailand. Email: darunksr@gmail.com ↑↑ The Corresponding Author, Department of Computer and Network Engineering, Vincent Mary School of Engineering, Assumption University, Bangkok, Thailand. Email: patanavijit@yahoo.com 978-616-361-823-8 © 2014 APSIPA ↑↑ paper is grouped as follows. Section II clarifies the related optical flow algorithm. Section III introduces the model of bilateral in combination with confidence based model (BC). Section IV introduces the performance result and conclusion. II. RELATED ALGORITHMS OF OPTICAL FLOW This section clarifies related algorithms of optical flow. A. Spatial Correlation-Based Optical Flow (SCOF) [1] The mechanic in correlation-based optical flow is similar to block matching that partition an image into non-overlapped with the fix size of rectangular block. Then, the best candidate of each block in pixel-based level is determined as motion vector. B. Confidence Based Model This algorithm was proposed in 2008 by R. Li and F. Yu. It presents the use of bidirectional symmetry in bi-direction (forward velocity (MV of frame ff+1) and backward velocity (MV of frame f+1f)). Both directions of MV are used to determine the reliable rate (R) by confident measurement defines as: || vln s, f vln ( s vln ( s, f ), f 1) || (1) Rln s, f exp n n n (|| vl ( s, f ) || || v ( s vl ( s, f ), f 1) ||) / 2 l Where l is forward, l- is backward, prevents the denominator from zero, s is position of current pixel, and v is MV in horizontal axis. Next, the final MV ( v and u ) is computed in average result from reliability base on pre-denoted neighborhood (N(s0)) defines as : (2) vln ( s0 ) Rln ( si )vln ( si ) / Rln ( si ) s i N ( s0 ) si N ( s0 ) This model shows very effective performance over several conditions even noise or non noise contamination sequences. C. Bilateral Filter [10] This model was introduced by C. Tomasi and R. Manduchi that was applied several computer vision and image processing [8,9,10]. The bilateral kernel is defined as:- APSIPA 2014 ( x n) exp ( | n |2 | I ( x n) I ( x ) 2 | ) 2 a2 2 b2 (3) Where δa is standard deviation of signal v(x) multiple by 7 and δc is standard deviation of signal I(x). Bilateral filter is applied to adjust the computation as follows:vb ( x) 1 W v( x) ( x n) (4) |n| N Where ɸ() is bilateral Gaussian kernel, and N is number of neighborhood. In our experiment, we set N equal to ±7. W is the kernel normalization factor is defined as:W gradient of image frame f and f+1 III. BILATERAL IN COMBINATION WITH CONFIDENCE BASED MODEL (BC) Under BC, the result of bilateral filter bidirectional symmetry is applied to lift the performance in achievement of MV under the noisy condition. In BC, the MV on both direction in forward and backward are obtained by using BCOF based on the concept of bidirectional symmetry in CHR. Next, the bilateral filter from is used to compute over the MV of previously forward MV and backward MV as the unit vector orientation. Next, the final MV is computed by using the reliability concept in confidence based model (Eq. 1 and Eq. 2) but the values of the unit vector orientation on bi-direction are used instead of the traditional bi-direction MV in computation as shown in Fig.1. IV. PERFORMANCE RESULT AND CONCLUSION We conduct an experiment over 4 conventional QCIF (176x144 with 100 frames) sequences. There are AKIYO, COASTGUARD, CONTAINER, and FOREMAN. We also simulate AWGN in 3 levels at 25dB (little noise), 20dB (medium noise), and 15dB (huge noise) over these sequences. So, 16 sequences totally are used in an experiment. For SCOF algorithm, we set ±3 for neighbors block size and set ±7 for window search area with 0.5 bilinear interpolation sub-pixel displacements for an experiment. Lastly, the performances evaluation over the effectiveness in PSNR is focused on our experiment by reconstruction image frames in comparison with their corresponding one in the original sequence defines as. 1 m 1 mn i 0 n 1 A ( i , j) B ( i, j) 2 (6) j 0 PSNR 10 x log 10 ( G 2I ) Err Take Image Sequences (Frame f and f+1) (5) ( x n) |n| N Err In Fig. 2-17 show the values of PSNR of the experiment sequences. From the experiment result, we found that the bilateral impacts the performance on reconstruction image especially over noisy sequence. With increasingly of noise, the bilateral generates better performance than SCOF. We also found that the confidence model helps to increasing the performance of bilateral filer. (7) Where Err is mean squared error. A is rebuilding image and B is original image at resolution (m×n). GI is 255 (value of 8 bits image). Compute MV on forward direction (f -> f+1) and backward direction(f+1 -> f) Based on SCOF algorithm MV in forward and backward direction Apply bilateral filter on forward MV and backward MV Bilateral vector in forward and backward Compute Final MV with reliability rate by using bilateral vector result of forward and backward Fig. 1 Process of BC algorithm. Fig. 2 PSNR of AKIYO (no noise) sequence. Fig. 3 PSNR of AKIYO (AWGN 25 dB) sequence. Fig. 4 PSNR of AKIYO (AWGN 20 dB) sequence. Fig. 5 PSNR of AKIYO (AWGN 15 dB) sequence. Fig. 6 PSNR of COASTGUARD (no noise) sequence. Fig. 8 PSNR of COASTGUARD (AWGN 20 dB) sequence. Fig. 7 PSNR of COASTGUARD (AWGN 25 dB) sequence. Fig. 9 PSNR of COASTGUARD (AWGN 15 dB) sequence. Fig. 10 PSNR of CONTAINER (no noise) sequence. Fig. 12 PSNR of CONTAINER (AWGN 20 dB) sequence. Fig. 14 PSNR of FOREMAN (no noise) sequence. Fig. 16 PSNR of FOREMAN (AWGN 20 dB) sequence. Fig. 11 PSNR of CONTAINER (AWGN 25 dB) sequence. Fig. 13 PSNR of CONTAINER (AWGN 15 dB) sequence. Fig. 15 PSNR of FOREMAN (AWGN 25 dB) sequence. Fig. 17 PSNR of FOREMAN (AWGN 15 dB) sequence REFERENCES [1] Reed TR, “Digital Image Sequence Processing, Compression, and Analysis,” Chemical Rubber Company (CRC) Press, 2005. [2] R. Li and S. Yu, “Confidence Based Optical Flow Algorithm for High Reliability” In proceeding of IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP), pp. 785-788, 2008. [3] D. Kesrarat. and V. Patanavijit, “Performance Evaluation of Differential Optical Flow Algorithms Based on High Confidence Reliability with Sub-Pixel Displacement,” In proceeding of the 33rd Electrical Engineering Conference (EECON), pp. 1305-1308, 2010. [4] D. Kesrarat. and V. Patanavijit, “Experimental Performance Analysis of High Confidence Reliability Based on Differential Optical Flow Algorithms over AWGN Sequences with Sub-Pixel Displacement,” In proceeding of Intelligent Signal Processing and Communication Systems (ISPACS), pp. 1-6, 2011. [5] D. Kesrarat and V. Patanavijit, "A Novel Robust and High Reliability Spatial Correlation Optical Flow Algorithm Based on Median Motion Estimation and Bidirectional Symmetry Flow Technique", In proceeding of IEEE International Symposium on Intelligent Signal Processing and Communication Systems (ISPACS), pp. 1-6, 2011. [6] D. Kesrarat and V. Patanavijit, " Experimental Analysis of Performance Comparison on Both Linear Filter and Bidirectional Confidential Technique for Spatial Domain Optical Flow Algorithm", The ECTI Transactions on Computer and Information Technology (ECTI-CIT), vol. 7(2), pp. 157-168, 2013. [7] T. Kondo and W. Kongpawechnon, "Robust Motion Estimation Methods Using Gradient Orientation Information", ScienceAsia 35 (Journal of The Science Society of Thailand), pp 196-202, 2009. [8] J.Sun, Y. Li, S. Kang, and H.-Y. Shun, "Symmetric stereo matching for occlusion handling," In proceeding of IEEE Conf. Comput. Vis.Pattern Recognit., pp. 399-406, 2005. [9] S. Paris, P. Kornprobst, J. Tumblin, and F. Durand, "Bilateral filtering: Theory and Applications,"Found. Trends Compt. Graph. Vis., Vol.4, No.1, pp.1-73, 2008. [10] M. G. Mozerrov, "Constrained Optical Flow Estimation as a Matching Problem," IEEE Transactions on Imiage Processing, vol.2, No.5, pp. 2044-2055, 2013.