Introduction to
Computer
Based Control
Systems
Introduction to Computer Based Control Systems
THIS BOOK WAS DEVELOPED BY IDC TECHNOLOGIES
WHO ARE WE?
IDC Technologies is internationally acknowledged as the premier provider of practical, technical training
for engineers and technicians.
We specialize in the fields of electrical systems, industrial data communications, telecommunications,
automation and control, mechanical engineering, chemical and civil engineering, and are continually
adding to our portfolio of over 60 different workshops. Our instructors are highly respected in their fields
of expertise and in the last ten years have trained over 200,000 engineers, scientists and technicians.
With offices conveniently located worldwide, IDC Technologies has an enthusiastic team of professional
engineers, technicians and support staff who are committed to providing the highest level of training and
consultancy.
TECHNICAL WORKSHOPS
TRAINING THAT WORKS
We deliver engineering and technology training that will maximize your business goals. In today’s
competitive environment, you require training that will help you and your organization to achieve its goals
and produce a large return on investment. With our ‘training that works’ objective you and your
organization will:
• Get job-related skills that you need to achieve your business goals
• Improve the operation and design of your equipment and plant
• Improve your troubleshooting abilities
• Sharpen your competitive edge
• Boost morale and retain valuable staff
• Save time and money
EXPERT INSTRUCTORS
We search the world for good quality instructors who have three outstanding attributes:
1. Expert knowledge and experience – of the course topic
2. Superb training abilities – to ensure the know-how is transferred effectively and quickly to you in
a practical, hands-on way
3. Listening skills – they listen carefully to the needs of the participants and want to ensure that you
benefit from the experience.
Each and every instructor is evaluated by the delegates and we assess the presentation after every class to
ensure that the instructor stays on track in presenting outstanding courses.
HANDS-ON APPROACH TO TRAINING
All IDC Technologies workshops include practical, hands-on sessions where the delegates are given the
opportunity to apply in practice the theory they have learnt.
REFERENCE MATERIALS
A fully illustrated workshop book with hundreds of pages of tables, charts, figures and handy hints, plus
considerable reference material is provided FREE of charge to each delegate.
CERTIFICATE OF ATTENDANCE
Each delegate receives a Certificate of Attendance documenting their experience.
100% MONEY BACK GUARANTEE
IDC Technologies’ engineers have put considerable time and experience into ensuring that you gain
maximum value from each workshop. If by lunchtime on the first day you decide that the workshop is not
appropriate for your requirements, please let us know so that we can arrange a 100% refund of your fee.
ONSITE WORKSHOPS
All IDC Technologies Training Workshops are available on an on-site basis, presented at the venue of
your choice, saving delegates travel time and expenses, thus providing your company with even greater
savings.
OFFICE LOCATIONS
AUSTRALIA • CANADA • INDIA • IRELAND • MALAYSIA • NEW ZEALAND • SINGAPORE •
SOUTH AFRICA • UNITED KINGDOM • UNITED STATES
idc@idc-online.com
www.idc-online.com
On-Site Training
SAVE MORE
THAN 50% OFF
the per person
cost
CUSTOMISE the
training to YOUR
WORKPLACE!
Have the training
delivered WHEN
AND WHERE you
need it!
All IDC Technologies Training Workshops are available on an on-site basis, presented at the venue of
your choice, saving delegates travel time and expenses, thus providing your company with even
greater savings.
For more information or a FREE detailed proposal contact Kevin Baker by e-mailing:
training@idc-online.com
IDC TECHNOLOGIES
Worldwide Offices
AUSTRALIA
Telephone: 1300 138 522 • Facsimile: 1300 138 533
West Coast Office
1031 Wellington Street, West Perth, WA 6005
PO Box 1093, West Perth, WA 6872
CANADA
Toll Free Telephone: 1800 324 4244 • Toll Free Facsimile: 1800 434 4045
Suite 402, 814 Richards Street, Vancouver, NC V6B 3A7
INDIA
Telephone : +91 444 208 9353
35 4th Street, Kumaran Colony, Vadapalani, Chennai 600026
IRELAND
Telephone : +353 1 473 3190 • Facsimile: +353 1 473 3191
Caoran, Baile na hAbhann
Co. Galway
MALAYSIA
Telephone: +60 3 5192 3800 • Facsimile: +60 3 5192 3801
26 Jalan Kota Raja E27/E, Hicom Town Center
Seksyen 27, 40400 Shah Alam, Selangor
NEW ZEALAND
Telephone: +64 9 263 4759 • Facsimile: +64 9 262 2304
Parkview Towers, 28 Davies Avenue, Manukau City
PO Box 76-142, Manukau City
SINGAPORE
Telephone: +65 6224 6298 • Facsimile: + 65 6224 7922
100 Eu Tong Sen Street, #04-11 Pearl’s Centre, Singapore 059812
SOUTH AFRICA
Telephone: +27 11 024 5520 • Facsimile: +27 86 692 4368
68 Pretorius Street, President Park, Midrand
PO Box 389, Halfway House 1685
UNITED KINGDOM
Telephone: +44 20 8335 4014 • Facsimile: +44 20 8335 4120
Suite 18, Fitzroy House, Lynwood Drive, Worcester Park, Surrey KT4 7AT
UNITED STATES
Toll Free Telephone: 1800 324 4244 • Toll Free Facsimile: 1800 434 4045
10685-B Hazelhurst Dr. # 6175, Houston, TX 77043
Website: www.idc-online.com
Email: idc@idc-online.com
Presents
Introduction to Computer Based Control
Systems
Revision 1
Website: www.idc-online.com
E-mail: idc@idc-online.com
IDC Technologies Pty Ltd
PO Box 1093, West Perth, Western Australia 6872
Offices in Australia, New Zealand, Singapore, United Kingdom, Ireland, Malaysia, Poland, United States of
America, Canada, South Africa and India
Copyright © IDC Technologies 2012. All rights reserved.
All rights to this publication, associated software and workshop are reserved. No part of this publication
may be reproduced, stored in a retrieval system or transmitted in any form or by any means electronic,
mechanical, photocopying, recording or otherwise without the prior written permission of the publisher. All
enquiries should be made to the publisher at the address above.
Disclaimer
Whilst all reasonable care has been taken to ensure that the descriptions, opinions, programs, listings,
software and diagrams are accurate and workable, IDC Technologies do not accept any legal responsibility
or liability to any person, organization or other entity for any direct loss, consequential loss or damage,
however caused, that may be suffered as a result of the use of this publication or the associated workshop
and software.
In case of any uncertainty, we recommend that you contact IDC Technologies for clarification or assistance.
Trademarks
All logos and trademarks belong to, and are copyrighted to, their companies respectively.
Acknowledgements
IDC Technologies expresses its sincere thanks to all those engineers and technicians on our training
workshops who freely made available their expertise in preparing this manual.
Contents
Introduction to Computer Based Control Systems
1
1.1 Introduction to computer based measurement and control systems 1
1.2 Role of computers in measurement and (process) control
3
1.3 Basic components of computer based measurement and control
systems
4
1.4 Architecture – computer based process control system
7
1.5 Human Machine Interface (HMI)
12
1.6 Hardware for computer based process control system
13
1.7 Interfacing computer system with process
19
1.8 Economics of computer based system for industrial application
24
1
Introduction to
Computer Based Control Systems
While the fundamental purposes and functions of Instrumentation systems have remained the
same from its inception, there is a paradigm shift, over the years, in methodology of
measurement, interpretation and control, due to, continuous technological innovations. The
introduction of fast and accurate digital technology and components such as analog-to-digital
converters, microprocessors and transducers associated with revolutionary advancements in
communication technology has replaced natural scale-up versions of manual monitoring and
control to highly advanced automated process monitoring and control systems. This chapter
introduces the concepts of hardware, software, and communication aspects of computer aided
measurement and control systems and discusses techno-commercial benefits of such systems for
its application in process industries.
In this chapter we will learn the following:
• Introduction to computer based measurement and control systems
• Role of computers in process control
• Basic components of computer based measurement and control system
• Architecture of computer based control
• Human Machine Interface (HMI)
• Hardware of computer based process control system
• Interfacing computer system with process
• Economics of computer based system for industrial application
1.1 Introduction to computer based measurement and control
systems
The industrial revolution has contributed largely in the development of machine based control
where machines in process industries were took over the work done by human physical power.
The early production processes were natural scale-up versions of the traditional manual practices.
These were designed as batch process which later was expanded to continuous processes,
resulting in economical and technological benefits. The industrial process control has
modernized with modernization of industries. Process control is therefore not a discovery of
recent past, but is rather as old as the industry itself. The engineers and designers of process
industries always tried to automate the processes as much as possible and to do so, brought in
measuring instruments. Thus the need of better instrumentation and automatic control became
the dominant reason for better operation of industrial processes. Conversely, the advancement in
2 Distributed Control Systems
instrumentation and control contributed to the development of larger and more complex
processes, bringing numerous technological and economical benefits to the operator.
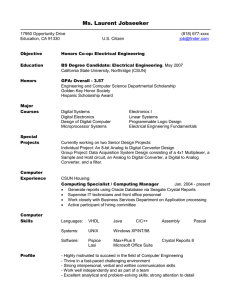
The earliest recorded suggestions for use of computer for measurement and control (in real-time)
application were made by Brown and Campbell in their paper in 1950. The paper contained the
diagram, as shown in Figure 1.1 below. In this specific reporting the computer was used in both
feedback and feed-forward loops. These scientists also suggested using digital computing
elements (logics) for setting up the control functions.. The first digital computer developed
specifically for control (in real-time application) was for airborne (military) operation, and in
1954 a digitrac digital computer was successfully used to provide an automatic flight and
weapons control system.
Figure 1.1
The proposed use of computer in measurement and control
Late 1950s itself saw the application of digital computers in industrial measurement & control
for the purpose of process control. The first industrial computer control system, called RW –
300 system (of Ramo-Wooldridge Company) was installed at Port Arthur refinery of Texaco
Company in Texas. This system was capable of providing closed-loop control. The RW-300
systems were later installed by a number of chemical industries during early 1960s to work as
supervisory control systems. The logged information was used for steady-state optimization
calculations to determine the set-points for standard analog controllers. These computers based
systems were only indicative type; that means these did not control directly the movement of
the valves or other final control elements.
Introduction to Computer Based Control Systems
3
Figure 1.2
The picture of Ramo-Wooldridge (RW-300) computer used in process control and data logging
The first direct-digital control (DDC) computer system developed and operated for process
monitoring and control was Ferranti Argus 200; a large system with a provision of 120 control
loops and 256 measurement inputs. The architecture of this computer system has ferrite core
memory storage system (it replaced the rotating drum as used by the RW – 300 computers).
Computers are now extensively used for measurement and control in process and manufacturing
industries. It has brought not only new possibilities but also new challenges to measurement and
control engineers. In the following texts and diagrams of these chapter basic elements, hardware
and software of computer based measurement and control systems have been discussed.
1.2 Role of computers in measurement and (process) control
The development of digital computer technology has, extensively increased the use of computers
for measurement and control application. The basic objective of computer based measurement
and control is to acquire the information from field devices (input), and compute a logical
decision to manipulate the material and energy flow of given process in a desired way to get
optimal output. The expectations from a process computer compared to a general purpose
computer is primarily in terms of response time, computing power, flexibility and fault tolerance,
which are need to be rigid and reliable; moreover, the control of the process has to be carried out
in real-time. Other difficulties encountered, mostly for process computers is to provide a solution
to the problem of complexity, flexibility, and geographical separation of process elements (plant
equipment) which are to be operated in a controlled manner.
Digital computer control applications in the process industries may be of passive or active type.
Passive application involves only acquisition of process data (data acquisition / data logging)
whereas active application involves acquisition and manipulation of data and uses it for (real
time) process control. The passive application deals predominantly with monitoring, alarming
and data reduction systems, as shown in Figure 1.3. The process data, after being acquired
(measured) on-line, is sent to the data acquisition computer through interface module. The smart
instruments (smart sensors, smart transmitters and smart actuators, the final control element),
with embedded computer help operator to receive real-time process measurement information
and automatic transmission in required form for further processing by the process control
4 Distributed Control Systems
computer. The smart instruments ensure that the actuator, transmitter or sensor function
according to the requirement of the user.
Figure 1.3
Digital computer use limited to passive application; used only for data acquisition / data logging
The major application of digital computers is in process control and plant optimization.
Computer control systems, once prohibitively expensive, can now be tailored to fit most
industrial applications on a competitive economic basis. The advances in the use of computer
control have motivated many and changed the concepts of the operations of industrial processes.
Video display terminals now provide the focus for operators to supervise the whole plant from a
control room. Large panel of instruments, knobs and switches are replaced by a few keyboards
and screens. Control rooms are now much smaller and fewer people are required to supervise the
plant.
Process control computers now have the capability to implement sophisticated mathematical
models. Plant managers and engineers can be provided with comprehensive information
concerning the status of plant operations to aid effective operation. With the use of
microprocessor-based instruments and new emerging techniques, it is possible for automatic
tuning of controller parameters for best operating performance. The expert systems and
advanced control techniques such as model based predictive control, are being applied with the
help of computers for optimization of the process operation.
1.3
Basic components of Computer Based Measurement and
Control System
The basic components are:
• Measurement and Data Acquisition
• Data conversion and scaling and checking
• Data accumulation and formatting
• Visual display
• Comparing with limits and alarm raising
• Events, sequence and trends; monitoring and logging
• Data logging and Computation
• Control actions
Introduction to Computer Based Control Systems
5
Figure 1.4
Digital computer used for process control; note the use of ADC and DAC for computer to Input and output matching.
A block diagram of computer based process control system is shown in Figure 1.4. As shown in
Figure 1.4(a), the controlled variable which is the output of the process, is measured as a
continuous electrical signal (analog), and converted into a discrete-time signal using a device
called Analog-to-digital-converter (ADC). This digital signal is fed back to a comparator
(digital) and compared with the discrete form of the set point, which is the desired value, by the
digital computer; this produces an error signal e. An appropriate computer program representing
the controller, called control algorithm, is executed which yields a discrete controller output. The
discrete signal is then converted into a continuous electrical signal using a device called Digitalto-analog-converter (DAC), the analog signal is fed to the final control element. This control
strategy is repeated at some predetermined frequency (time division multiplexed with other
control loops and other associated activities) to achieve the closed-loop computer control of the
process. Figure 1.4(b) is a block diagram of the computerized control system explained above.
6 Distributed Control Systems
Case study: Computer based control of a hot-air-blower
Figure 1.5
A hot air blower system – example process taken up for computer based control
The figure 1.5 above is the schematics of a process where a centrifugal fan blows air over a
heating element and into a tube. The hot-air temperature at the output is measured and by say, a
thermocouple, which, through signal conditioner, generates a proportional voltage signal to
temperature. The output temperature in this process may be increased or decreased by varying
the heater current. The air-inlet valve opening and closing for flow of air into the blower is
adjusted by means of a reversible motor. The motor operates at constant speed and is turned on
or off by a logic signal applied to motor on / off control.
Figure 1.6
A hot air blower system – controlled using computer based system
Introduction to Computer Based Control Systems
7
Figure 1.6 above is the general schematic diagram of the process discussed above being
controlled by a Computer based mechanism. The information regarding the measured value of
air temperature and fan inlet valve position is obtained in the form of analog signal. An analogto-digital converter is used to convert the analog signal into digital signal before it is fed to the
computer. The status of fully open or fully closed position of the fan inlet valve is obtained in the
form of digital signals. For the output generated by the computer, digital -to- analog converter is
used to send control signal in analog form to the motor control. The block diagram of the above
system showing the control portion through computer is in Figure 1.7
Figure 1.7
A hot air blower system – Block diagram of the control system
1.4
Architecture – Computer based Process Control System
Computer-aided Industrial Process can be classified on the basis of their architecture under one or
more of the following:
a. Centralized Computer Control
b. Distributed Computer Control
c. Hierarchical Computer Control
1.4.1 Centralized Computer Control
The early digital computer based control had the following drawbacks:
• Low speed magnetic drum memory, slow speed processors
• Very small memory size
• Programming done in machine language
• Inadequate knowledge of operator in computer technology
• Limited knowledge of supplier on trends and technology
• No maintenance support, limited spares support
• Poor reliability of computer hardware and software, etc
The centralized computer based process control system comprised of large computer system with
huge space and power consuming type magnetic core memory, wired-in arithmetic and logical
functions (gate logics); mostly done to improve the speed of operation.. But the system was
expensive due to high cost of core memory and additional electronics used in the system. To
justify the high cost, every possible control functions, including both supervisory and DDC, were
incorporated in a single computer system. These were popularly known as the central or
mainframe computer.
The use of centralized computer control systems also had problems of providing expensive
communication systems for bringing in the (field) signals to the centralized computer location;
and output control signals to the field devices (valves, motors, actuators etc.). Electrical noise
problems for large distance communication of signals was a major cause of process interruptions
due to sudden computer stoppages leading to complete stoppage of plant/process and, as a
consequence, resulted in losses and poor quality products..
8 Distributed Control Systems
1.4.2 Distributed Computer Control Systems
With the advent of microprocessors and microcomputers, distributed computer control
architecture became very popular because such systems were capable of tackling the problems
and limitations of centralized computer control system were removed. While the technology and
application of distributed control system has been dealt with wide details in subsequent chapters,
it is worth mentioning here that the work of monitoring and control of the industrial processes is
not divided by functions and allocated to a particular computer; instead, the total work is divided
up and spread across several computers. Since industrial processes are geographically located
over wide area, it is essential that the computing power required to control such processes be also
distributed and more emphasis be put to locations where major (control) activity takes place; this
limits the data flow to a single sink and instead ensures continuation of operation of the plant
even if there are failures at some sub systems. This type of physical distribution of digital
computer based control is also known as Distributed Digital Control (DDC); refer Figure1.8
below.
Figure 1.8
Architecture of Distributed Digital Control (DDC)
Foxboro’s TDC 2000 system was the first, and truly distributed computer control system; this
was introduced as an alternative to the not so popular and unreliable centralized computer control
system. This distributed computer control system comprised of a set of small, widely distributed
computer systems containing one or more microprocessors, each of them controlling one or more
loops. All of these computers were connected by a single high speed data link that permitted
communication between each of the microprocessor-based systems with centralized operator
station. Figure 1.9 below illustrates the concept of distributed computer control system as has
been incorporated in Foxboro TDC 2000 DCS.
Introduction to Computer Based Control Systems
9
Figure 1.9
Foxboro TDC 2000 Distributed Control System; schematic diagram
1.4.3 Hierarchical Computer Control Systems
As the name implies, in this type of Systems there is hierarchy of computers connected on a
network with each performing distinct functions. In this type of control, the upper level
computers depend on lower level devices for process data, and the lower level systems depend
upon the higher level systems for more sophisticated control functions such as overall plant
optimization.
A popular 5-level automation hierarchy of a computer integrated industrial manufacturing plant is
shown in Figure 1.10 below. Here, Level 0 is the lowest level; the field instrumentation is
installed for the measurement of process parameters. This level, would forward the measured
values (data) to Level 1 for process control functions. At this level, functions such as process
monitoring and control, inter process operation and monitoring, system coupling, etc. are
performed by the computer installed at this level. At the Level 2, supervisory functions are
implemented. These include data collection and logging, process optimization, etc. The
mathematical models of the process efficiently take care of overall process optimization. Level 3
is the plant (management) level where functions such as plant resource allocation, production
planning and scheduling, maintenance scheduling, production accounting, etc are done.
Figure 1.10
Five levels of automation hierarchy of a (hierarchical) computer based process control system
10 Distributed Control Systems
The production schedule is prepared at Level3 computer based on management inputs
(requirements) such as sales orders, stock level, selling cost, profit margins, operating cost,
scheduled maintenance plans for production units, etc. This information is communicated down
the line to the supervisory level (Level2) computers. At level 2 the computed set-points for
various parameters to meet the above production schedule are passed on to the process controllers
at level 1. These computations are done based on product recipe and operation sequences
programmed and stored in the database maintained at this level. Computers at level 1 take
requisite control actions to maintain the process conditions based on set points.
The monitoring and recording of all the plant are done by computers at Level 3; this include
plant/process parameters and various events, alarm conditions, production and quality issues and
selectively (event based) transfer these to the corporate level (the Level 4) for management
information (MIS) purposes.
A schematic diagram of a hierarchical Computer Control system using the 5 level of automations
hierarchy for an industrial process is shown in Figure 1.10 above. As may be seen in the figure
above, the hierarchical systems involve some form of distributed network and hence most
systems and therefore such systems may be termed as a mixture of hierarchical and distributed
computer control system.
1.4.4 Tasks of computer control system
Computer based automatic monitoring and control system of a process plant is generally
concerned with large number of variables operating under a wide range of process dynamics. The
process algorithm therefore requires the development of large number of complex functions
which work on a large number of widely scattered actuators of various types, known as final
control elements, based on multiple inputs to the computer as process parameters.
Figure 1.11
Schematic diagram of a process with both feedback and feed forward control with tasks of the computer based control
well defined.
An industrial plant need to meet the production demands while ensuring the quality of the
products and safety of the plant’s resources. The productivity associated with lowest production
costs has is a important factor as well. While such activities should be catered by the computer
based system it should also work as control system enforcer in which the computers at various
levels are synchronized to carry out respective jobs and communicate in a network to keep units
of the plant production system operating at some optimal level.
Introduction to Computer Based Control Systems 11
The above schematic diagram (Figure 1.11) shows the process being monitored and controlled
with multiple process physical parameters (pressure, temperature, flow etc.) as inputs to
computer system leading to multiple (manipulated) outputs from the computer system( t final
control elements, like valves etc.) to maintain the optimum control on the process. As may be
seen, in this particular case of computer control, the tasks of the feedback control system may be
through software based controllers (say PIDs) and the feedforward control done through
computer mathematically modeled process simulators.
1.4.5 Task listing of computer based control system
The readers may refer to the Figure Fig. 1.10 above; the tasks carried out by each level in the
automation hierarchy are as under:
Field Level (Level-0)
• Measurement of process parameters, signal conditioning etc. if necessary, and
transmission of field parameters to the control level (Level-1) computer control
systems.
Control Level (Level-1)
• Systems at this level maintain direct control of the plant units under their
cognizance, detect emergency condition in these units and take appropriate action.
• Undertakes system coordination and reporting jobs by collecting information on
unit production, raw material consumption, and energy consumption; transmits to
higher level computer (Level-2). Programming part of operator’s human machine
interface (HMI) done at this level.
• Takes up reliability assurance activities by performing diagnostics on the various
control equipment; this also helps in detecting the faults and maintaining the
standby system if connected to the system.
Supervisory Level (Level-2)
• This level enforces the control on the system by responding to any emergency
condition at its own level; also optimizes processes under its control as per
established production schedule and carry out all established process operational
schemes or operating practices for the processes.
• The coordination of the plant operation is taken up for here for data reporting; this
level collects and maintain process/production database. The records for inventory
and raw material are maintained at this level; monitors on the energy consumption
by units under its control.
• This level is also the one where communication with the higher and lower level
computer systems are coordinated.
• The reliability assurance part of the job performs diagnostics on the various control
equipments to detect the fault and keep updating hot-backup (standby) system if
connected in the hierarchy.
Plant Level (Level-3)
This level undertakes the production planning and scheduling job by preparing immediate
production schedule under its area of control.
The production cost optimization function is taken up by modifying the production schedule
based on inputs received from lower levels; the energy consumption and optimization of energy
use is manipulated at this level.
The plant coordination and operational data reporting jobs which include preparing production
reports, maintenance of plant inventory about material and energy usage, maintaining
communications with the higher and lower level computers, operation related data collection and
off-line analysis for future prediction and usage, providing services to the operator’s humanmachine interface (HMI) are taken up at this level.
12 Distributed Control Systems
Under reliability assurance activities, the diagnostics on the various control equipment to help in
detecting the fault and keeping the standby system live is taken up at this level
Management level (Level-4)
• The core area of activity at this level involves management tasks; under Sales and
Marketing the activities taken up are customer order management, order booking,
and transferring order information to plant level (Level – 3) computers. Market
forecasting and market intelligence, customer database management, market survey
are the other activities of this level.
• Under finance and accounting the logging and monitoring of company’s sales and
expenditures, annual accounting, profit and loss account for the management
information etc. are undertaken
1.5
Human Machine Interface (HMI)
The Human-Machine Interface is technically where the human and the machine may interact. It is
the area of the human and the area of the machine that interact during a given task. Interaction
can include touch, sight, sound, heat transference or any other physical or cognitive function. The
goal of human-machine interaction engineering is to produce a user interface which makes it
easy, efficient, and enjoyable to operate a machine in the way which produces the desired result.
This generally means that the operator needs to provide minimal input to achieve the desired
output, and also that the machine minimizes undesired outputs to the human
HMI for process monitoring and control provides the historical review, trending, storage of
process conditions, and maintenance/updating of any control elements (viz. computer hardware
and software systems, communication system, etc.). The standard software packages may have
the following display features:
• Plant mimic diagram of plant/process overview (Figure 1.12 below)
• Alarm overview presenting information on the alarm status of large areas of the
plant
• Multiple area displays presenting information on the control system
• Loop displays giving extensive information on the details of a particular control
loop of group of control loops
HMI devices consist mainly of the following components
• Display unit (CRT)
• Keyboard
• Input unit
• Printing unit
• Control Panel/desks, mimic board/panel
• Recorders
An improperly designed man-machine interface (MMI) without consideration of human
capability, background and grasping power, may lead to confusing presentations of information
with illogical relationships forcing humans to commit errors resulting in system inefficiency or
even failures. We tend to dismiss these errors, but they may be due to mismatch between
operator and machine (MMI) or operator and task, resulting from one or more of the following
reasons:
a. Ineffective dialogue structure
b. Ineffective display presentation and linkages
c. Delay in deciding the control actions to display the required page
d. Confusing displays due to overcrowding of information, ineffective information coding
e. Untrained operator
f. Delayed feedback on control actions
g. Ineffective communication means within control center with other level control centers
Introduction to Computer Based Control Systems 13
Figure 1.12
An HMI device displaying the plant mimic diagram; Picture courtesy Wienview
Therefore, computer system designer should consider human s as integral and indispensible part
in the design of MMI at each stage. MMI systems, dialogue structures, information coding and
presentation, etc. must consider the end users and operators who operate the system. This will
result in accessibility of the system after it is installed, and the users/operators will exploit its
worth to the maximum in safe and optimal operation of the process under control, continuously.
With the availability of the 4th generation computer programming languages (4GL) software such
as GUI, it has now become very easy to design a user friendly MMI.
1.6
Hardware for Computer based process control system
A general purpose digital computer with adequate hardware provisions can be used as an
industrial process (real-time) computer control. Besides, to make it suitable for measurement and
control purpose, the digital computer should have additional features like ability to communicate
efficiently and effectively with plant and operating personnel. It should also be capable of rapid
execution of tasks (algorithms) for real time control actions. With the advancement in
technology and development of microcomputers and minicomputers, these digital computers may
be used for large industrial process control applications with up to several thousand input/ output
(I/O) points.
1.6.1 Architecture of general purpose computer
The four basic components of a general computer are -.
• Central Processing Unit (CPU)
• Storage section (memory)
• Input/ output (I/O) section and
• Bus Interface
14 Distributed Control Systems
Figure 1.13
Block diagram of a general purpose computer and picture of an actual CPU
Figure 1.13 above shows the diagram of a general purpose computer system; Figure 1.14 below
is the schematic diagram of the same. All the physical components of this are termed as
hardware. The programmer has to write a set of instructions to make these physical devices to
perform specified functions; such instructions are called program or software. The hardware
components work as per instructions of software; without software (programming) the hardware
simply cannot work.
Figure 1.14
Schematic diagram of a general purpose computer
The Central Processing Unit (CPU) is the main unit inside the computer (sometimes called the
heart of the computer). This unit is responsible for all events inside the computer. It controls all
internal and external devices, performs arithmetic and logic operations and consists of control
unit, arithmetic logic unit (ALU), temporary (primary storage) and general purpose registers. The
control unit continually supervises and controls the operations/activities within the CPU (refer
Figure 1.15 below). The operations of a processor are controlled by instruction set of this
processor. The instruction set is "hard wired" in the CPU and determines the machine language
for the CPU. Processors differ from one another by the instruction set.
Introduction to Computer Based Control Systems 15
Figure 1.15
Block diagram – central processing unit
The arithmetic logic unit (ALU) is the fundamental building block of a computer and is the part
where actual computations take place. It consists of circuits which perform arithmetic operations
(e.g. addition, subtraction, multiplication, division) and logical operations (AND OR NOT etc.)
over data received from memory and capable to compare numbers. While performing these
operations the ALU takes data from the temporary storage area inside the CPU named registers.
Registers are a group of cells used for memory addressing, data manipulation and processing.
Some of the registers are general purpose and some are reserved for certain functions. It is a highspeed memory which holds only data for immediate processing and results of this processing. If
these results are not needed for the next instruction, they are sent back to the main memory and
registers are occupied by the new data used in the next instruction.
Figure 1.16
Schematic representation of Arithmetic Logic Unit (ALU)
The word length used by the computer is important both in ensuring adequate precision in
calculations and also, in allowing direct access to a large area of main storage within one
instruction word. It is always possible to compensate for short word lengths, both for arithmetic
precision and for memory access, by using multiple word operations. But, the disadvantage is
that it increases the time for the operations. The word length is governed by the length of data
bus. The amount of main storage directly accessible is also influenced by the number of address
line provided on the input/output interface.
Another important aspect of information sharing within a CPU is the Addressing mode. The
addressing modes are the ways how architectures specify the address of an object they want to
16 Distributed Control Systems
access. In general purpose register type machines, an addressing mode can specify a constant, a
register or a location in memory.
Storage - The main function of storage device is to store data and instructions (programs). The
most elementary unit of stored information is the bit (a 0 or 1) value and a byte (consisting of 8
bits) representing a character of the information or data. The storage capacity of a computer is
expressed in terms of certain multiples of a byte as kilobytes, megabytes, gigabytes, terabytes as
it is in metric system
For economical and technological reasons storage devices come in many sizes, speed and costs.
Storage devices range from inexpensive low-capacity, slow speed device to larger, more
expensive, faster ones suitable for permanent storage of the information of, in this discussion,
large process industries. The storage devices store two distinct types of information: data and
instructions (programs). They are of three types:
• Main storage or immediate access of storage (IAS)
• Auxiliary or secondary memory storage
• Cache memory
The main memory (also called primary memory) storage is a high-speed random access memory
(RAM) which is volatile in nature, which means, it keeps the data/ information as long as power
is available to the computer. As soon as power is off, the content of the memory is erased
(removed). It stores information or program which is required for execution. The operation of
main memory is very fast. RAM (random access memory) permits both read and write
operations by the CPU. Another kind of memory, which CPU can read but cannot write or
change, is called ROM (Read Only Memory). Variations that can be reprogrammed by off-line
devices are called PROM (programmable ROM or EPROM (Erasable Programmable ROM).
The use of ROM has eased the problem of memory protection to prevent loss of programs
through power failure or corruption of memory by malfunctioning of the software.
Figure 1.17
Picture of Random Access Memory (RAM)
The auxiliary memory storage (such as tape or disk) is non-volatile in nature that means, it
keeps data, information, program, or instructions even after the power is off. These devices
provide bulk storage for programs or data, which are required infrequently at a much lower cost
than the high-speed main memory. But, it has disadvantages of taking much longer access time
and they need for interface boards and software to connect to the CPU. Auxiliary storage devices
operate asynchronously to the CPU and care has to be taken in deciding on the appropriate
transfer technique for data between the CPU, fast access (main) memory and the auxiliary
storage.
Introduction to Computer Based Control Systems 17
Figure 1.18
The concept of cache memory
An additional storage part, known as cache memory (Figure 1.18 above) is also used in the
process control computers for improvements in performance and utilization. Cache memory is an
auxiliary memory that provides a buffering capability by which the relatively slow and everincreasingly large main memory can interface to the CPU at the processor cycle time in order to
optimize performance. It is a high-speed storage that is much faster than the main storage, but
extremely expensive as compared with the main storage. Therefore, only relatively small caches
are used.
The input/output (I/O) interface is the sub-system through which the CPU communicates with
the outside world.
Through these devices the Human Machine Interface (HMI) for
communication between the CPU and displays and the CPU and other peripheral devices such as
printers, external storage, keyboards, mouse etc. interface. I/O interface is one of the most
complex areas of a computer system because of the wide variation in the rate of data transfer and
wide variety of devices which have to be connected. The I/O devices of process control
computers are divided into three types:
• Operator IO
• Process IO
• Computer IO
A schematic diagram showing interfaces of computers for process control applications system are
shown in Figure 1.19. All the devices here share the same interface bus system and hence the
CPU treats all devices with equal priority.
18 Distributed Control Systems
Figure 1.19
Schematic diagram of a process control computer interfaced with various field devices.
Operator IO Devices communicate with the operators; process operator use devices such as
keyboards, push buttons, thumb switches, etc. to input data or command to the computer and they
receive information from the computer via devices such as VDU (Visual Display Unit), LED
(light-emitting-diode) numerical displays, pilot lights, etc. computer operators and program
developers (programmers) use computer console to communicate with the computer.
Process IO devices communicate directly between CPU and all plant devices such as sensors,
limit switches, tachometers, encoders, etc. for inputs and control valves, motor starters, stepping
motors, etc. for output. The plant devices are connected to the computer through ADC (analogto-digital converters) and DAC (digital-to-analog converter) subsystem to convert them into
analog or digital signal as the case may be.
Computer IO devices directly communicate with the CPU for data and information exchange
with the peripheral devices.
Bus Interface
Bus Interface is an electronic pathway (media) in computer based system that provides a
communication path for data to flow between the CPU and its memory and peripherals and
amongst the CPUs connected to the computer system. (Refer to Figure 1.14 above). A bus
contains one wire for each bit needed to specify the address of a device or location in memory,
plus additional wires that distinguish among the various data transfer operations to be performed.
There are address bus, data bus and control bus; there may be a status bus too. These are
normally confined to inside the computer chip for data and information movements and also
available to outside world to expand the power of the computer system. A bus carries electrical
signal and the wires may be tracks on a printed circuit board or in the form of a ribbon cable.
This printed circuit board or ribbon can be plugged into the slots provided on the computer board.
A bus can transmit data in either direction between any two ends provided in the computer (bidirectional).
Introduction to Computer Based Control Systems 19
On a microcomputer, the bus is usually called an expansion bus because its design determines the
degree to which the minimum configuration of the system can be expanded with regard to
memory, processing speed, graphics capability, and the peripheral support. The expansion bus is
the collection of wires, paths, connectors, and controllers responsible for distributing the data and
instructions from the microprocessor to the peripheral expansion cards. Slots connected to the
bus provide places to plug those cards in, and the bus then provides a mechanism for
communicating with them.
With increased use of computers for process control applications and other purposes, various
standards were introduced. Following are the common expansion buses which were introduced
with IBM - compatible PCs (personal computers):
• S-100 bus
• ISA (Industry Standard Architecture) bus
• ISA-AT (Advanced Technology) bus
• MCA (micro-channel Architecture) bus
• EISA (Extended Industry Standard Architecture) bus
• NU-bus
Note: Readers may refer to any standard book on microprocessors / personal computers to get
more details on these buses
1.7
Interfacing computer system with process
There are a wide variety of instruments and actuators (sensors/ transducers) which are connected
to process or plant for measurement and control of process parameters such as temperature, flow,
pressure, level, speed, etc. In a computer based process control system, it is required to convert
these process parameters, which are physical quantity (analog) to a digital (electrical) signal
pattern which the computer can understand. All the sensors (instruments) should have, therefore,
standard interface (compatible to host computer) to achieve this conversion. The field
instruments (or sensors) send measured data four categories:
Analog Quantities; Thermocouples, strain gauges, flow meters, level sensors, etc. generate
measured outputs as analog quantities in the form of milli-volts (mV) or milli-amperes (mA).
The values of measured quantities are usually scaled to 0 to 5 V, 0 to 10 V, -5 to +5 V,-10 to +10
V, 4 to 20 mA or 0 to 20 mA. Analog quantities are continuous variables and have to be both
sampled and converted to a digital signal. The mV or mA signals are amplified and fetched to
the computer after converting these analog signals into digital signal.
Digital Quantities; these are process events such as (on/off) operation of a limit switch, open or
closed contacts, a valve( in open or closed position), a switch in power on or off position, a relay
in open or closed condition, etc. These statuses (on/off, open/close) are sensed in form of digital
quantities. These digital quantities can be either binary (0/1) or a Binary Coded Decimal (BCD)
or in other formats. Digital quantities are directly sent to the computer without any conversion.
Pulses or pulse rates; these may be outputs (or inputs) of some measuring instruments such as
flow meters, stepper motors as controllers, valves, a motor on or off, etc.
Telemetry; this is a mechanism of transmitting a measured process quantities to a convenient
remote location or to multiple locations, in a form, suitable for displaying, recording or actuating
a process. The use of telemetry system makes it possible to group several instruments in a
centralized room to enable the operator to have a complete picture of the plant status. The
increasing use of remote outstations such as in electrical substations, power generation units, data
related to mining operations, hazardous areas etc. has made telemetry a convenient option. The
data may be transmitted by a wired or wireless method.
20 Distributed Control Systems
There are a variety of interface cards which have been developed and added to the computer
system to connect to different measurements inputs of process parameters; these are put to signal
conditioning to convert to appropriate signal capable of interfacing with digital computers. The
interfaces are:
• Analog interfaces
• Digital interfaces
• Pulse interfaces
• Real-time clock
• Standard (bus) interfaces
Analog interfaces; these interfaces take up the continuous (time varying) type analog inputs.
The interfacing hardware ensures compatibility of the incoming (or outgoing) signals to and from
digital computer. The popular analog interfaces applied with digital computer are:
• Analog-to-digital converter (ADC)
• Digital -to- analog converter (DAC)
• Multiplexing devices
• MODEM
Analog-to-digital converter (ADC)
Figure 1.20
An 8-level (3-bit) ADC coding scheme
An analog-to-digital converter (abbreviated ADC, A/D or A to D) is a device that converts a
continuous quantity to a discrete time digital representation. An ADC may also provide an
isolated measurement.
Typically, an ADC is an electronic device that converts an input analog voltage or current to a
digital number proportional to the magnitude of the voltage or current. However, some nonelectronic or only partially electronic devices, such as rotary encoders, can also be considered for
the purpose of ADCs. The digital output may use different coding schemes. Typically the digital
output will be a two's complement binary number that is proportional to the input.
The resolution of the converter indicates the number of discrete values it can produce over the
range of analog values (span). The values are usually stored electronically in binary form, so the
resolution is usually expressed in bits. For example, an ADC with a resolution of 8 bits can
encode an analog input to one in 256 different levels ;(28 = 256). The values can represent the
Introduction to Computer Based Control Systems 21
ranges from 0 to 255 (i.e. unsigned integer) or from −128 to 127 (i.e. signed integer), depending
on the application.
Some of the popular method of analog to digital conversion are Direct conversion (Flash) ADC,
successive approximation ADC, ramp compare ADC, integrating ADC etc.
Digital-to-Analog converter (DAC)
Digital-to-analog conversion is a process in which signals having two defined levels or states
(digital) are converted into analog signals (theoretically infinite number of states). A common
example is the processing, by a modem, of computer data into audio-frequency (AF) tones that
can be transmitted over a twisted pair telephone lines. The circuit that performs this function is a
digital-to-analog converter (DAC)
Figure 1.21a
An 8-bit Digital to Analog Converter (DAC) circuit using R-2R network
Figure 1.21b
Functional diagram of an 8-bit Digital to Analog Converter (DAC)
ADC and DAC devices can be classified as unipolar or bipolar, depending on their voltage range
capability. These are also classified according to binary code used to represent numbers, their
number of bits of resolution (8, 10, 12 bits), and the technology and circuit involved in
fabricating these devices. A typical application of ADC and DAC used for interfacing analog
signals to a digital computer controlled process is shown below in Figure 1.22.
22 Distributed Control Systems
Figure 1.22
ADCs and DACs connected for interfacing analog signals to and from computer in process control
Multiplexing (MUX); it is the process of sending multiple signals or streams of information on a
carrier at the same time in the form of a single, complex signal. At receiver end, the multiplexed
signal is de-multiplexed to recover all the multiplexed signals. The main reason of multiplexing
is to ensure efficient use of the full bandwidth of the communication channel by means of lower
transmission cost.
The 3 different methods of multiplexing, which is commonly used for industrial application are:
• Space Division Multiplexing
• Frequency Division Multiplexing
• Time Division Multiplexing
Space Division Multiplexing (SDM) – this is the method of providing multiple fixed bandwidth
channels by multiple physical paths (i.e., pairs of wires or optical fibers). An example of SDM is
the use of a 25-pair cable to carry the information of 25 individual sensors from the field
premises to one the local control station of the plant. In actual practice, hundreds of twisted pair
wires, coaxial cables, and optical fiber cables can be grouped to for a larger diameter cable.
Figure 1.23
FDM, with three signals to three users sharing the same bandwidth
Frequency Division Multiplexing (FDM); here a higher bandwidth channel is divided into
multiple individual smaller bandwidth channels. Signals on these channels are transmitted at the
same time but at different carrier frequencies. As may be seen in Figure 1.23 above, each
transmitter modulates its source's information into a signal that lies in a different frequency subband (like transmitter 1 generates a signal in the frequency sub-band between 92.0 MHz and 92.2
MHz). The signals are then transmitted across a common channel. At the receiving end of the
system, bandpass filters are used to pass the desired signal to the appropriate user and to block all
the unwanted signals.
Introduction to Computer Based Control Systems 23
Time Division Multiplexing (TDM); this is a method of putting multiple data streams in a
single signal by separating the signal into many segments, each having a very short duration.
Each individual data stream is reassembled at the receiving end based on the timing.
Figure 1.24
Example of TDM showing three channels multiplexed / demultiplexed and transmitted / received
The circuit that combines signals at the source (transmitting) end of a communications link is
known as a multiplexer. It accepts the input from each individual end user, breaks each signal
into segments, and assigns the segments to the composite signal in a rotating, repeating sequence.
The composite signal thus contains data from multiple senders.
At the other end of the long-distance cable, the individual signals are separated out by means of a
circuit called a demultiplexer, and routed to the proper end users. A two-way communications
circuit requires a multiplexer / demultiplexer at each end of the long-distance, high-bandwidth
cable
Figure 1.25
Schematic diagram of modems connecting two remotely placed computers via conventional telephone network.
MODEM – This device transmits data between computers, workstations and other peripheral
devices interconnected by means of conventional communication lines supporting analog
transmission. Modem transforms (modulate) data from a digital device to an analog form which
is suitable for transmission on (analog) lines. Since, in general, the data flows in both direction,
modems are also able to receive an analog signal from some remote device and restore it back
(by demodulation) to its original digital form (as shown in Figure 1.25 above.
24 Distributed Control Systems
1.8
Economics of computer based system for industrial application
Till the advent of microprocessors and microcomputers, computer based process control was very
expansive. A strong justification was required for using computer based process control system
in place of conventional system. Computers were used for control purposes in only some
industrial applications that required complex sequencing and processing. After the advent of
microprocessors and microcomputers and their wide spread availability, the cost of computers
have now drastically reduced and at the same time computers have become more powerful.
Today, the application of computer controlled system is justified automatically because of its low
cost, its capabilities to handle large complexity of industrial processes and high returns
(immediate payoffs) from such systems.
1.8.1 Advantages of computers in measurement and control
Some of the major advantages of using computers for measurement and control application area;
• Computers ensure the repeatability in the product quality that is essential in
manufacturing plants.
• It permits flexibility to modify the sequencing and control procedures to provide for
the manufacture of a different product and frequent changes in product
specification. It maintains a data base containing the product recipe and thus is easy
to change to a new recipe quickly and reliably.
• Use of computers increases the productivity of the plant significantly by ensuring
greater plant availability.
• It provides increased understanding of the behavior of the processes.
• It helps in reduction in dead time of batch operation.
YOU MAY ALSO BE INTERESTED
IN THE FOLLOWING TITLE:
Practical Distributed
Control Systems
(DCS) for Engineers
& Technicians
This book is available for purchase in
printed form or as an ebook
For more details about this title
please visit the link below:
http://idc-online.com/products/?country=%23
If you would like a quote or any further information
please do not hesitate to contact us:
books@idc-online.com