AAS 06-132 FAMILIES OF LOW-ENERGY LUNAR HALO
advertisement

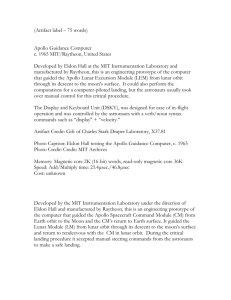
AAS 06-132 FAMILIES OF LOW-ENERGY LUNAR HALO TRANSFERS Jeffrey S. Parker∗ This study demonstrates how to use dynamical systems methods to construct families of low-energy ballistic transfers to lunar Halo orbits. The low-energy transfers implement invariant manifold pathways to transfer from an initial LEO parking orbit to a final lunar Halo orbit using only a single injection maneuver from LEO. The ballistic transfers require about 100 more days, but 15% less energy, than conventional Hohmann transfers. The families of lunar Halo orbit transfers presented here reveal that missions may depart the Earth at nearly any inclination or at any time during the year; once at the Moon, these transfers permit access to almost any final lunar orbit, including polar orbits. The dynamical systems method makes it possible to quickly identify families of these transfers, allowing mission designers to review the parameters of many transfers simultaneously in order to meet their mission design requirements. INTRODUCTION This paper demonstrates how to use dynamical systems methods to systematically construct families of ballistic lunar transfers (BLTs). A BLT state space map (or BLT map for short) is constructed that may be used to design missions to the Moon in much the same way as porkchop plots are used to design two-body trajectories. Where solutions to Lambert’s Problem are the fundamental building-blocks of porkchop plots, ballistic lunar transfers are the fundamental building-blocks of BLT maps. A Ballistic Lunar Transfer (BLT) is defined in this paper as a transfer from a LEO parking orbit to a lunar libration orbit that requires no deterministic maneuvers beyond LEO. A spacecraft on a BLT typically travels 1 − 1.5 million kilometers towards the Earth’s L1 or L2 Lagrange points before falling back to the Moon. At the Moon, the spacecraft ballistically arrives at one of a variety of types of lunar libration orbits, including Halo and Lissajous orbits. The entire transfer requires much less energy than a conventional Hohmann transfer, allowing payloads to be 25% to 33% larger in mass.1 Once the spacecraft is on an unstable libration orbit, the spacecraft may remain there or transfer for free to a trajectory that intersects nearly any lowlunar orbit, including equatorial and polar orbits, or it may transfer to nearly any region on the surface of the Moon. A transfer to a low-lunar orbit does require another injection maneuver, albeit smaller than the injection maneuver in a Hohmann transfer. See Parker and Lo (2005) for the construction, analysis, and practical applications of a single BLT. The dynamical systems approach to constructing BLTs allows one to construct full families of lunar transfers, including transfers that depart the Earth from many inclinations, at any altitude, and at many times of each month. Figure 1 shows a representation of all BLTs that ∗ The Colorado Center for Astrodynamics Research, University of Colorado, Boulder, CO 80309 1 Depending on mission hardware - see the Results section for more information. Figure 1: A BLT map, shown in the center, where the darkest regions encompass all trajectories that depart from LEO parking orbits and transfer ballistically to a lunar Halo orbit. The plots surrounding the central map indicate where example transfers exist in the BLT map. may be constructed throughout a month of opportunities, targeting a single lunar Halo orbit. The plot in the center is a BLT map, colored according to the altitude of the LEO parking orbit used. The black regions represent BLTs that depart straight from the surface of the Earth; altitudes above the surface are colored in lighter shades, although, a 185-km LEO parking orbit is still very dark. The plots surrounding the central BLT map show example ballistic lunar transfers that exist to this single lunar Halo orbit. One may construct families of BLTs by tracing contours in the BLT map, corresponding to specific LEO altitudes. Once mission designers have access to such families of transfers, they may be able to quickly conduct trade studies and swiftly determine if a BLT exists that meets their mission design requirements. The dynamical systems approach to constructing BLTs uses the circular restricted threebody model as an approximation to the solar system much like conic sections are used to initially approximate orbits about planetary and celestial bodies. The approximation is then used as a guide for constructing the real BLT in the full ephemeris model of the solar system. This paper begins by presenting the motivation and background for this work. It then summarizes the dynamical systems method and the construction of a ballistic lunar transfer. The paper then demonstrates how to build a BLT map and how to identify families of BLTs. Many families of BLTs are presented, including families of BLTs that exist for different lunar libration orbits. Finally, this paper examines the benefits that mission designers gain from having access to these families. This paper is an extension of the work presented in Parker and Lo (2005): it demonstrates how the single BLT presented in Parker and Lo (2005) fits in with the grand system of all families of BLTs. MOTIVATION NASA has called for a sustained, evolutionary approach to the development of the Moon. The trajectories used in the Apollo program are very useful for sending humans to the Moon and to its vicinity, but other trajectories may be more useful for sending supplies, support satellites, and even space stations to the Moon. Ballistic lunar transfers require less energy to reach the Moon, and much less energy to reach libration orbits about the Moon, thereby reducing the cost of sending material to the Moon. Furthermore, the impact velocities for missions to the surface of the Moon are generally lower for missions using BLTs rather than Apollostyle trajectories. The primary trade-off is the 100-day transfer time and the increased cost of operations for the increased transfer duration. The increased transfer time makes ballistic lunar transfers unsuitable for human missions to the Moon, but the reduced energy cost makes them a viable choice for robotic missions. One of the great achievements in 20th century astrodynamics was the development of the modular approach to trajectory design using the patched conic method. Interplanetary missions can now be built piecewise, making the development very efficient and effective. The final mission design approximation is then differentially-corrected into the full ephemeris model of the solar system. This technique has led to the realization of missions like the Voyagers, Galileo, Cassini, etc. For low-energy trajectories, such as the BLTs presented in this paper, conic sections are not good approximations. Consequently, the elegant machinery developed for the patched conic method does not apply and a different approach must be developed for the design and optimization of these trajectories. Dynamical systems theory has provided many of the missing technologies that allow mission designers to divide low-energy missions into manageable pieces, to optimize those pieces, and then to glue each trajectory piece together again. In the case of low-energy ballistic lunar transfers, the analog of a conic section is an invariant manifold and the analog of a porkchop plot is a BLT map. This study is one small step taken to understand the structure of low-energy three-body trajectories in the Earth-Moon system, in support of the exploration of the Moon. BACKGROUND Many people have contributed to the study of BLT trajectories. The following research particularly influenced the work presented in this paper. In 1968, Charles Conley was one of the first people to construct a low-energy lunar transfer based on the dynamics of the three-body problem (Conley, 1968). Conley’s foundational work on the three-body problem is fundamental to the methods described in this paper. Around the same time, Farquhar and Kamel (1973) constructed large Halo orbits about the lunar L1 and L2 points using the Lindstedt-Poincaré series expansion. In the mid 1980’s, Simó’s group in Barcelona combined Conley’s dynamical systems approach with Farquhar and Kamel’s asymptotic expansion approach to design a Halo orbit about the Earth’s L1 for the SOHO mission (Gómez et al., 2001). Their work profoundly influenced the future of lowenergy mission design. In 1990, the Japanese Hiten mission (see Uesugi 1991 and Belbruno and Miller 1990) was sent to the Moon through the implementation of a low-energy transfer to the Moon, constructed using Weak Stability Boundary theory (Belbruno, 2004). WSB theory is an energy method, which may be explained heuristically using invariant manifold theory, however, the algorithms do not require any knowledge or computation of invariant manifolds. In 2000, Koon et al. (2000) developed one of the first algorithms that could be used to reproduce a Hiten-like trajectory using invariant manifold theory, although it was limited to planar transfers. In 2005, Parker and Lo (2005) developed a new method to construct three-dimensional ballistic lunar transfers using invariant manifold theory. The present study is an extension of that work, exploring full families of such three-dimensional transfers. The Dynamical Systems Method The dynamical systems method is used to construct a complicated trajectory in the SunEarth-Moon system by first identifying and exploring simple solutions to the system. In the system described by the CRTBP, the simplest dynamical systems solutions are the five Lagrange Points, i.e., the fixed-point solutions (Szebehely 1967). The next somewhat more complicated set of solutions includes the set of periodic orbits in the system (see, e.g., Lo and Parker 2004 or Strömgren 1935 for examples of simple periodic orbits in the Earth-Moon CRTBP). One may then construct and analyze dynamical structures from those solutions, e.g., stable and unstable invariant manifolds. In this study, we have used the set of Halo orbits about the Moon’s L2 point (see Howell 1984) as simple periodic orbits that shed light on real trajectories that exist in the solar system. We have taken specific Halo orbits and computed their stable and unstable manifolds to analyze them for practical uses in the real solar system. Although the dynamical systems method works by approximating a complicated system (e.g., the full solar system) by a simplified system (e.g., the CRTBP), it has been found that the solutions in the simplified system are typically very good approximations to real trajectories in the complicated system. To demonstrate this, Figure 2 shows plots of an example Halo orbit that exists about the Moon’s L2 point, produced in the CRTBP (left) and in the full JPL ephemeris system (right). One notices that the trajectory produced in the full ephemeris Figure 2: Plots of an example Halo orbit that exists about the Moon’s L2 point, produced in the CRTBP (left) and in the full JPL ephemeris system (right). The orbit is shown in four perspectives in both cases. system is not perfectly periodic, but it is well-approximated by the CRTBP Halo orbit. The main aspect of dynamical systems theory used in this paper is the theory and practical application of invariant manifolds in low-energy mission design. For a more detailed explanation of invariant manifolds, see Parker and Lo (2005). Very concisely, an orbit’s unstable invariant manifold is the set of all trajectories that a particle could take if that particle’s state were perturbed off of the orbit. Likewise, an orbit’s stable invariant manifold is the set of all trajectories that a particle could take to asymptotically arrive onto the orbit. These structures are much simpler in the CRTBP than in the full ephemeris system, yet trajectories modeled by the CRTBP are close approximations to the true trajectories that exist in the full ephemeris model of the solar system. As a demonstration of their use, Figure 3 shows the connections between the unstable manifold of a periodic orbit about the Moon’s L1 point and the stable manifold of a periodic orbit about the Moon’s L2 point. One may construct a ballistic transfer between these two orbits by finding an intersection of the two manifolds that does not require any ∆V. This procedure is discussed in more detail in Lo and Parker (2005). Figure 3: Left: The intersection of the unstable manifold of a periodic orbit about the Moon’s L1 point and the stable manifold of a periodic orbit about the Moon’s L2 point; Right: Two example free transfers. The dynamical systems method lends itself to simple parameterization of the trade space. For instance, each intersection shown in Figure 3 may be uniquely defined by the location τd where the departure trajectory departs its periodic orbit and by the location τa where the second trajectory arrives onto its periodic orbit. A purely ballistic transfer may be described by either τd or τa . This paper presents the dynamical systems method applied to the problem of identifying and constructing ballistic lunar transfers. The Patched Three-Body Model Ballistic lunar transfers are interesting because they require the gravitational interaction of the Earth, the Moon, and the Sun on the spacecraft in order to exist. This system is generally too complicated to study in the full JPL ephemeris model of the solar system. However, trajectories in this system are well-approximated using a model that is referred to here as the Patched Three-Body Model. The Patched Three-Body Model uses purely three-body dynamics to model the motion of a spacecraft in the Sun-Earth-Moon-Spacecraft four-body system. When the spacecraft is near the Moon, the spacecraft’s motion is modeled by the Earth/Moon three-body system. Otherwise, the spacecraft’s motion is modeled by the Sun/Earth-Moon-Barycenter three-body system. The boundary of these two systems is referred to as the three-body sphere of influence (3BSOI), and is computed much like the two-body sphere of influence. Once the spacecraft breaches the 3BSOI, its state is transferred to the other three-body system. The concept of the 3BSOI will be further studied in a future paper, but for now it is given as a sphere centered at the Moon with a radius rSOI given by: rSOI = R M Moon MSun 2/5 where R is the distance between the Sun and the Earth-Moon barycenter, M Moon is the mass of the Moon, and MSun is the mass of the Sun. If R = 1.49597870 × 108 km, M Moon = 7.3483 × 1022 kg, and MSun = 1.9891 × 1030 kg (Vallado 1997), then the radius of the 3BSOI, rSOI , is approximately equal to 159, 198 km. A sphere of that radius centered at the Moon includes the Moon’s L1 and L2 points, but not the other three Lagrange points. This is satisfactory for the purposes of this study, but will be further studied in the future for missions that require use of the other three Lagrange points. For a discussion of the equations of motion, the definition of the Jacobi constant, and an interpretation of the CRTBP, see Szebehely (1967) or Lo and Parker (2004), for instance. Low-Energy Ballistic Lunar Halo Transfers Low-energy ballistic lunar transfers, as previously defined, are trajectories that a spacecraft may use to go from a low-Earth parking orbit to an orbit temporarily captured by the Moon using only the one large injection maneuver at LEO. An orbit temporarily captured by the Moon is defined in this paper to be an orbit that remains near the Moon for some predetermined length of time (which can be as long as desired), but which has sufficient energy to escape. The spacecraft does require a second maneuver to become fully captured by the Moon. Many three-body orbits, such as Halo orbits and other libration orbits, are orbits that are temporarily captured by the Moon given this definition. The BLTs presented in this paper transfer a spacecraft to a lunar Halo orbit about the Moon’s L2 point, but the methodology could be used to transfer to any unstable temporarily-captured orbit. Figure 4 shows two example ballistic lunar transfers, viewed in the Sun-Earth rotating frame from above the ecliptic. For a detailed analysis of an example ballistic lunar Halo transfer, see Parker and Lo (2005). The main points of each step of a typical ballistic lunar transfer will now be reviewed. Figure 4: Two dynamical systems ballistic lunar transfers, viewed in the Sun-Earth rotating frame from above the ecliptic. The 3BSOI is shown in red encircling the Moon. The LEO Parking Orbit Ballistic lunar transfers may begin in any LEO parking orbit, including the inclination of Cape Canaveral, provided that they depart at the right time. In this study, it has been found that ballistic lunar transfers may also be constructed to depart LEO at most times during the year. A specific transfer has a small window of opportunity, but in the event of a delayed launch, a nearby transfer may be easily found with similar properties to open a new launch window. Alternatively, if a launch is delayed, the mission may add a small maneuver enroute to correct the trajectory to reach the proper lunar orbit. The Outbound Trajectory After the spacecraft performs the injection maneuver from its LEO parking orbit, the spacecraft travels toward either the Earth’s L1 point or the Earth’s L2 point. At this point, it is beneficial to describe the spacecraft’s motion from a two-body perspective and from a three-body perspective, since both perspectives help to paint the full picture. From a two-body perspective, the spacecraft begins by transferring from its LEO orbit onto a highly-eccentric orbit, an orbit with an apogee far beyond the Moon’s orbital radius. As the spacecraft approaches and traverses the apogee of this orbit, the spacecraft lingers long enough to give the Sun a large amount of time to perturb its orbit. By the time the spacecraft has begun to return back to its perigee the spacecraft’s orbit will have changed so much that its perigee is now near the radius of the Moon’s orbit about the Earth. As the spacecraft approaches this new perigee, it encounters the Moon. From a three-body perspective, the spacecraft begins by transferring from its LEO orbit onto a trajectory that shadows the stable manifold of a Sun/Earth-Moon three-body orbit (typically a Lissajous orbit). The spacecraft approaches this orbit as it approaches the Earth’s L1 or L2 point, but does not enter it. The spacecraft then transfers to a trajectory that shadows the orbit’s unstable manifold. This trajectory takes the spacecraft to the lunar encounter. The observed transfers occur for free due to the unstable nature of this three-body orbit. During this transfer, the spacecraft will require station-keeping to remain on its trajectory. The station-keeping cost is minimal and may be accounted for by typical trajectory correction maneuvers. Lunar Encounter As the spacecraft approaches the Moon, it arrives onto the stable manifold of an Earth-Moon three-body orbit, such as a lunar Halo orbit. As the spacecraft follows this stable manifold, it asymptotically approaches the three-body orbit. The three-body orbit may be planar or three-dimensional; it may orbit the Moon’s L1 point, its L2 point, or the Moon itself. The orbit is typically chosen to either meet mission requirements (such as a communication satellite at L1 or L2 ) or to be used as a transitional orbit before transferring to a final lunar orbit. Lunar Halo orbits may be chosen to transition a spacecraft for free to a trajectory that intersects a low-Lunar orbit with any inclination, or to the surface of the Moon itself. FAMILIES OF LOW-ENERGY LUNAR HALO TRANSFERS Parameterization The dynamical systems method of constructing ballistic lunar transfers provides three natural parameters that may be used to define the transfer: the Jacobi constant, C, of the targeted Earth-Moon three-body orbit, the initial Sun-Earth-Moon angle of the transfer, θ, and the location about the Earth-Moon three-body orbit where the spacecraft arrives, τ. These three parameters may be systematically varied to construct families of ballistic transfers. A fourth parameter is also required to indicate which type of manifold is being used, namely, an interior manifold or an exterior manifold. These parameters are explored in the following sections. Earth-Moon Orbit Parameter: C Depending on the mission requirements, one may wish to target any type of Earth-Moon three-body orbit. As a demonstration, we have chosen to target an orbit from the family of Halo orbits centered about the Moon’s L2 point. Some sample orbits from this family are shown in Figure 5 (left). Each orbit in this family may be uniquely identified by its inner x-axis crossing. However, since an orbit’s Jacobi constant provides more information about trajectories on its manifolds, we have opted to identify a particular Halo Figure 5: Left: Example orbits from the family of Halo orbits about the Moon’s L2 point, shown from four perspectives. Right: A plot of the Jacobi constant of the family of Halo orbits with respect to the orbits’ inner x-axis crossing. orbit from this family by its Jacobi constant. A plot of the Jacobi constant of each Halo orbit in this family with respect to its inner x-axis crossing is shown in Figure 5 (right). One can see that most orbits in the family may be uniquely identified by their Jacobi constant. Sun-Earth-Moon Angle: θ The parameter θ is defined to be the angle between the Sun-Earth line and the Earth-Moon line. It is a required parameter to specify the transfer between the two three-body systems. Figure 6 shows an example of the geometry and the definition of θ. Figure 6: The definition of θ, the Sun-Earth-Moon angle. Arrival Location: τ, p Each point on a periodic orbit may be uniquely described by the parameter τ, where in this study τ ranges from 0 to 1. The parameter τ is analogous to the twobody parameter ν, the true anomaly. Figure 7 shows a plot of the definition of τ when applied to a symmetric orbit, such as a Halo orbit about L2 . When one is constructing the invariant manifolds of an unstable periodic orbit, one produces sample trajectories on the manifold for visualization purposes. These sample trajectories are often spaced at even intervals of τ, as can be seen in the plot on the right in Figure 7. Furthermore, when the state of the orbit is perturbed at a given τ, the perturbation can occur in two directions: an interior or an exterior direction. A trajectory on the interior manifold travels immediately from the orbit toward the vicinity of the Moon; a trajectory on the exterior manifold travels immediately away from the vicinity of the Moon. The parameter p contains the information about the direction of the perturbation. In this study, p may be set to “Interior” or “Exterior”, corresponding to an interior Figure 7: Left: The definition of τ, describing locations about a three-body orbit; Right: A visualization of both the interior and exterior invariant manifolds, described by the parameter p. perturbation or an exterior perturbation, respectively. See Figure 7 for a plot of the two halves of an example manifold. BLT State Space Maps The low-energy lunar Halo transfer studied in Parker and Lo (2005) is a particular lunar transfer for a single [C, θ, τ, p] state. A BLT map may be constructed by setting two of the four parameters constant and varying the other two parameters systematically. One can then observe families of low-energy lunar Halo transfers. The two BLT maps presented in this section are constructed in the following manner. First, the parameter C is set by choosing an Earth-Moon Halo orbit to study. The orbit used in this section has been chosen because its unstable manifold intersects a particular polar lunar orbit that met a set of predefined mission design requirements. BLT maps for other EarthMoon Halo orbits, i.e., other values of C, are shown later in this paper. The first BLT map presented in this section has the parameter p set to “Exterior”, constraining the BLT map to display results for trajectories that arrive at the Earth-Moon Halo orbit from the exterior direction. This direction generally provides the shortest transfer times. The second map has the parameter p set to “Interior” for comparison. Once the parameters C and p are set, then the parameters θ and τ are varied to map out the trajectories that exist for those C- and p-values. At a given (θ, τ ) combination, a BLT trajectory is constructed by taking the Halo orbit’s state at that τ-value, perturbing it in the direction of the orbit’s stable manifold, and propagating it backwards in time. The perturbation is added in such a way as to construct the trajectory on the “Interior” or “Exterior” manifold, dictated by p. The parameter θ sets the position of the Moon about the Earth at the time that the perturbation is made. From that moment, the trajectory is propagated backwards in time, switching between the Earth-Moon three-body system and the Sun-Earth three-body systems each time the trajectory passes through the 3BSOI. When a trajectory crosses the 3BSOI boundary, the trajectory may continue in the other system in many different directions, based on the value of θ. As one varies the value of θ, one is rotating the Halo orbit and its entire manifold about the Earth. This has the effect of dramatically varying the potential destinations of each trajectory in the manifold. Each BLT trajectory is propagated, with its unique (θ, τ ) combination, and then analyzed to determine the following characteristics: • r p / h p : the periapse radius / altitude of the BLT trajectory with respect to the Earth. • ∆V: the ∆V required to insert a spacecraft from a circular LEO parking orbit of radius r p onto the BLT. • i LEO : the inclination of the LEO parking orbit. • TOT: the time of transfer from the LEO ∆V to insertion into the lunar Halo orbit (i.e., the location of the perturbation at the lunar Halo orbit). Additional parameters of interest will be discussed in the last section of this paper. One of the most interesting parameters is the periapse radius of the trajectory with respect to the Earth. If a perigee radius is found that corresponds to an altitude of 185 kilometers, Figure 8: An example BLT map where C = 3.057455, p =”Exterior” and each trajectory has been propagated for 195 days. The shading indicates the perigee altitude of each trajectory, such that points colored black approach the closest to the Earth. Figure 9: The same plot shown in Figure 8 with example trajectories shown, indicating the variety of BLT families that exist. for example, then a spacecraft would be able to start in a LEO parking orbit with an altitude of 185 kilometers, perform a ∆V, and insert onto that ballistic lunar transfer. The BLT was constructed by propagating a trajectory backwards in time from the lunar Halo orbit; hence, after the LEO ∆V, the spacecraft is set to transfer ballistically to the lunar Halo orbit (ignoring any necessary trajectory correction maneuvers and/or station keeping maneuvers). The trajectories in the BLT map have been propagated for a specified amount of time. A trajectory may encounter additional perigees with different inclinations if propagated further. This consideration will be explored later in the paper. Example BLT Maps We have produced two example BLT maps to demonstrate how to identify families of ballistic lunar transfers. The BLT map shown in Figure 8 was produced by setting C to 3.057455 and p to ”Exterior”; the parameters θ and τ were then varied throughout their respective ranges, producing a trajectory for each combination. The trajectories were each propagated for 195 days and the closest approach to Earth was identified. The shading of the plot in Figure 8 indicates Figure 10: Center: An example BLT map where C = 3.045636, p =”Interior” and each trajectory has been propagated for 195 days. The shading indicates the perigee altitude of each trajectory, where points colored black approach the closest to the Earth. Surrounding plots: Example BLT trajectories, indicating the variety of interior BLT families that exist. the perigee altitude of each trajectory, where points colored black approach the nearest to the Earth. Figure 9 shows the same plot as in Figure 8, but it also includes trajectories to show the variety of ballistic lunar transfers that exist. A second example BLT map was produced in the exact same manner as in Figure 8, except that C was set to be 3.045636 and p was set to “Interior”. This led to the construction of an example set of ballistic lunar transfers that approached the lunar Halo orbit from the interior, shown in Figure 10. Each of these transfers flies by the Moon at least once before entering the lunar Halo orbit. The bands observed in this plot are an effect of entering the interior region of the Earth/Moon system. The spacecraft may make an arbitrary number of revolutions about the system before arriving onto its final lunar Halo orbit. The corresponding fractal basins indicate the complex, chaotic nature of these trajectories. Extracting Families The BLT maps shown in Figures 8 and 10 are colored according to the closest approach that each of the respective trajectories makes with the Earth. The trajectories were all propagated from the lunar orbit backward in time to the closest approach with the Earth. Thus, if a mission designer wished to find a ballistic lunar transfer that departed the Earth from an altitude of 185 km, the mission designer would only need to identify the 185-km contour on the map and then every mission option would be quickly identified. To demonstrate this, Figure 11: The BLT map given in Figure 8 with a contour superimposed, indicating all available ballistic lunar transfers that depart the Earth from a 185-km LEO parking orbit. Figure 11 shows the BLT map from Figure 8 with a contour superimposed, indicating all available ballistic lunar transfers that depart the Earth from a 185-km LEO parking orbit. Of course, there are many other transfers that exist departing the Earth from a 185-km LEO parking orbit; those shown in Figure 11 are all the available lunar transfers that exist to this particular lunar Halo orbit from the exterior direction, requiring a time of transfer no greater than 195 days. Nonetheless, once those constraints have been set one may use these BLT maps to quickly identify the families of ballistic lunar transfers that exist for a particular mission. RESULTS Varying Transfer Time A BLT map that plots a parameter such as perigee altitude is very dependent on the length of time that each trajectory is propagated. Obviously, if the time duration is very short, e.g., 30 days, none of the trajectories will have the time needed to approach the Earth. If the time duration is extended beyond the first perigee, it is also possible that the trajectories will return to make a second perigee passage that is potentially closer, or has a different inclination, etc. The plots shown in Figure 12 show how the BLT map evolves when one allows the trajectories to be propagated further. Figure 12 includes plots that have a propagation time between 93.6 days (21.55 nondimensional three-body time units) and 759.9 days (175.0 nondimensional three-body time units). One can see that as the time duration increases, new families of BLTs appear. Each BLT map was produced using C = 3.05 and p =”Exterior”. Figure 13 shows the succession of plots when p is set to “Interior”. Figure 12: BLT maps for Exterior trajectories with C = 3.05 and with propagation times between 93.6 days (top-left) and 759.9 days (bottom-right). The propagation time increases from left to right and from top to bottom. Varying Lunar Halo Orbits Each BLT map produced in Figures 12 and 13 has used the same lunar Halo orbit. This orbit was initially chosen because its unstable manifold intersected a desirable low-altitude polar orbit. However, ballistic lunar transfers may be constructed between the Earth and many Figure 13: BLT maps for Interior trajectories with C = 3.05 and with propagation times between 93.6 days (top-left) and 759.9 days (bottom-right). The propagation time increases from left to right and from top to bottom. Figure 14: BLT maps for Exterior trajectories from a succession of lunar Halo orbits with Jacobi constants ranging from 3.022 to 3.152, each with a propagation time of 195 days. The Jacobi constant increases from left to right and from top to bottom. Figure 15: BLT maps for Interior trajectories from a succession of lunar Halo orbits with Jacobi constants ranging from 3.022 to 3.152, each with a propagation time of 195 days. The Jacobi constant increases from left to right and from top to bottom. lunar orbits. Figure 14 shows a succession of BLT maps, produced by different lunar Halo orbits. Each Halo orbit was taken from the same family of lunar Halo orbits, i.e., the family of Northern Halo orbits about the LL2 point. The parameter p was set to be “Exterior” in Figure 14 and each trajectory was propagated for 195 days. Figure 15 shows the same succession of orbits, but with p set to “Interior”. Summary The families of BLTs presented in this paper span a multitude of options for mission designs. The requirements of a specific mission to the Moon, be it for a communication satellite or a mission to the surface of the Moon, will most likely set a tight constraint on which lunar libration orbit to use for its ballistic lunar transfer. But even a single lunar libration orbit may be accessed by a wide variety of BLTs, as can be seen with merely a glance at Figure 11. Upon further analysis of the families observed in Figure 11, one finds that these families form sets of families, theoretically producing an infinite number of families of BLTs (where each family contains a spectrum of BLTs), although few of those families are practical for mission designers. Each BLT in any family has many parameters, including the lunar arrival location τ, the Sun-Earth-Moon angle θ, the ∆V insertion cost at LEO, the inclination of the LEO parking orbit, the duration of time required to traverse from LEO to the Moon, etc. The parameters of the BLTs in a family vary continuously from one end of the family to the other. Figure 11 Figure 16: The ∆V costs of the BLT solutions highlighted in Figure 11. Each family in the insert is shown in a different shade. showed a plot of θ vs. τ, highlighting the BLTs that depart from a 185-km LEO parking orbit. To demonstrate the variety of BLT families that exist, Figure 16 shows a plot of θ vs. the LEO ∆V insertion cost for the BLTs that depart from a 185-km LEO parking orbit. One can see that these solutions are easily grouped into families that each span a range of ∆V values. Some families yield BLTs that are cheaper than others when viewed strictly from a ∆V perspective. Of course, one must observe all parameters of the BLTs before choosing one that is optimal for a given mission design. Table 1 summarizes several parameters of the BLTs highlighted in Figure 11, including the range of ∆V insertion costs, the inclination range of the LEO parking orbits, and the range of transfer durations in each family. The BLTs presented are limited to a transfer duration of 195 days; others certainly exist that require longer durations to reach their final lunar libration orbit. Other parameters of BLTs will be explored in a subsequent paper. Table 1: The range of various parameters identified in the BLT solutions highlighted in Figure 11. Parameter ∆V Insertion Cost LEO Inclination Transfer Duration Minimum Value ∼ 3.21 km/s 0 deg ∼ 98.3 days Maximum Value ∼ 3.385 km/s 180 deg 195+ days Two of the most compelling reasons that BLTs should be considered for robotic missions to the Moon are the lower total ∆V cost (especially for missions to lunar libration orbits) and the reduced ∆V cost of additional insertion maneuvers performed after reaching the Moon. It is quickly apparent that there are two different mission scenarios that should be addressed: one scenario involves sending a spacecraft to a low-lunar orbit, the other sends the spacecraft to a lunar libration orbit. The following paragraphs address the implementation of a BLT in each scenario and compare the BLT’s performance with a standard direct transfer. Missions to low-lunar orbits. Sweetser (1991) compares several types of lunar missions, each designed to transfer a spacecraft from a 167-km circular LEO parking orbit to a 100-km circular polar lunar orbit. For comparison, a BLT was constructed using the process described in this paper to make the same transfer. Table 2 summarizes the ∆V costs associated with each leg of the transfer, comparing the BLT to the standard Hohmann transfer, a biparabolic transfer, a ballistic transfer constructed by Belbruno & Miller2 , and the theoretical minimum described by Sweetser (1991). One notices that the BLT constructed here compares well with the ballistic transfer constructed by Belbruno & Miller. The BLT requires approximately 80 m/s less ∆V than the Hohmann transfer. The largest benefits of the BLT option are its flexibility as a mission design option and its reduced lunar insertion ∆V (approximately 175 m/s less than a Hohmann transfer). The reduced lunar insertion cost also indicates a reduced impact velocity if the mission were to land on the surface of the Moon. Table 2: A comparison of several types of missions transferring a spacecraft from a 167-km circular low-Earth orbit to a 100-km circular polar lunar orbit. Transfer Type Minimum BLT Belbruno/Miller Biparabolic Hohmann Earth Injection ∆V (km/s) 3.099 3.235 3.187 3.232 3.140 Moon Insertion ∆V (km/s) 0.622 0.644 0.651 0.714 0.819 Total ∆V (km/s) 3.721 3.879 3.838 3.946 3.959 Missions to lunar libration orbits. A mission to a libration orbit, such as a Halo orbit, benefits much greater from the use of a ballistic lunar transfer than a mission to a low-lunar orbit. Table 3 compares the ∆V cost of a conventional, direct transfer to a Halo orbit3 compared with a ballistic lunar transfer to the same Halo orbit. For comparison, this is the same Halo orbit used in the construction of the BLT presented in Table 2. One can see that the BLT requires approximately 515 m/s less ∆V to insert into this Halo orbit than the direct transfer. The reduction in ∆V allows one to send payloads approximately 25% to 33% larger in mass compared with conventional trajectories, depending on the launch vehicle used.4 Furthermore, the spacecraft does not require the execution of a second large maneuver to insert into the Halo orbit. 2 Internal Jet Propulsion Laboratory memorandum. 3 This transfer involves two maneuvers: the first maneuver injects the spacecraft onto a Hohmann transfer from the LEO parking orbit to the perigee point of a trajectory on the Halo orbit’s stable manifold. At that point, a second maneuver is performed to insert the spacecraft onto the stable manifold, which leads the spacecraft directly to the Halo orbit. A similar process is presented in Topputo et al. (2004). 4 Values computed using the information about the upper stage of various launch vehicles found at http://www.astronautix.com/lvs/, 2005. Table 3: A comparison of a direct transfer and a ballistic transfer to a lunar Halo orbit from a 167-km circular low-Earth orbit. Transfer Type Direct BLT Earth Injection ∆V (km/s) 3.132 3.235 Halo Insertion ∆V (km/s) 0.618 0.0 Total ∆V (km/s) 3.750 3.235 DISCUSSION Applications to Lunar Mission Designs The nature of ballistic lunar transfers makes them particularly useful to send spacecraft into lunar libration orbits. Once in a libration orbit, the spacecraft is temporarily captured by the Moon and may remain there indefinitely for check-out purposes or to meet specified science or technological needs. Because the lunar libration orbits are unstable, a spacecraft in such an orbit may depart the orbit for free and ballistically transfer back to the Earth, to another lunar libration orbit, to a low-lunar orbit, or even to the surface of the Moon. Almost any lunar orbit is accessible from the class of lunar libration orbits, including equatorial and polar orbits. The insertion cost into a low-lunar orbit is lower than the insertion cost of conventional transfers; likewise, the impact velocities for transfers to the surface of the Moon are also lower than from conventional transfers. Hence, BLTs offer a lower-cost alternative to such missions. Furthermore, a spacecraft on such an orbit may cycle to and from the Earth without requiring any deterministic maneuvers. The longer transfer times (approximately 3 − 4 months longer) make BLTs undesirable for human missions to the Moon, but they are certainly a viable option for robotic missions to the Moon. This paper has demonstrated how to use dynamical systems theory to construct families of ballistic lunar transfers. The aim of the research is to give mission designers the tools to conduct swift trade-studies to determine if a BLT is a good choice to meet their requirements for a mission to the Moon. If a BLT is a good choice, knowledge of the families of BLTs will allow the mission designer to quickly identify where the BLT exists, how to construct it, how to design effective windows of opportunities in the event of a delayed launch, etc. BLT maps provide a means of comparing the characteristics and performance of many BLTs simultaneously, much like the way that many solutions to Lambert’s Problem can be simultaneously compared in a porkchop plot. In this way, missions to and from the Moon may be designed much more efficiently. Future Work The families presented in this paper are complex and will be further explored in future papers. Additionally, many other parameters will be discussed, including the stability of each BLT, the number of perigee and perilune passes, and the angles associated with the profiles of each transfer. The families will be compared to determine which are the most useful for practical mission designs between the Earth and the Moon. ACKNOWLEDGEMENTS This work has been completed under partial funding by a National Defense Science and Engineering Graduate (NDSEG) Fellowship sponsored by the Deputy Under Secretary of Defense for Science and Technology and the Office of Naval Research; and by the National Aeronautics and Space Administration through the Jet Propulsion Laboratory, California Institute of Technology. The author would like to thank Dr. Martin Lo from the Jet Propulsion Laboratory for his guidance throughout the work that led to this paper, and for his valuable comments and suggestions during the editing of this paper. The author would also like to extend his gratitude to Dr. George Born for his support throughout the research. REFERENCES E. A. Belbruno. Capture Dynamics and Chaotic Motions in Celestial Mechanics. Princeton University Press, Princeton, NJ, 2004. E. A. Belbruno and J. Miller. A ballistic lunar capture trajectory for the japanese spacecraft hiten. Technical Report IOM 312/90.4-1731-EAB, Jet Propulsion Laboratory, Cal. Tech., 1990. C. Conley. Low energy transit orbits in the restricted three body problem. SIAM J. Appl. Math., 16: 732–746, 1968. R. W. Farquhar and A. A. Kamel. Quasi-periodic orbits about the translunar libration point. Celestial Mechanics, 7(4):458–473, June 1973. G. Gómez, A. Jorba, J. Llibre, R. Martinez, J. Masdemont, and C. Simó. Dynamics and Mission Design near Libration Points, volume I–IV. World Scientific Publishing Co., Singapore, 2001. K. C. Howell. Three-dimensional, periodic, ‘Halo’ orbits. Celes. Mech., 32(53), 1984. W. S. Koon, M. W. Lo, J. E. Marsden, and S. D. Ross. Shoot the Moon. In AAS Spaceflight Mechanics 2000, volume 105, part 2, pages 1017–1030, 2000. M. W. Lo and J. S. Parker. Chaining simple periodic three-body orbits. In AIAA/AAS Conference, number 380, Lake Tahoe, CA, August 2005. M. W. Lo and J. S. Parker. Unstable resonant orbits near Earth and their applications in planetary missions. In AIAA/AAS Conference, volume 14, Providence, RI, August 2004. J. S. Parker and M. W. Lo. Shoot the Moon 3D. In AIAA/AAS Conference, number 383, Lake Tahoe, CA, August 2005. E. Strömgren. Connaissance actuelle des orbites dans le problème des trios corps. Copenhagen Observatory Publications, (100), 1935. also Bull. Astr. Vol. 9, No. 87, 1935. T. H. Sweetser. Estimate of the global minimum DV needed for Earth-Moon transfer. In AIAA/AAS Spaceflight Mechanics Meeting, number 91-101, Houston, TX, February 1991. V. Szebehely. Theory of Orbits: The Restricted Problem of Three Bodies. Academic Press, New York, 1967. F. Topputo, M. Vasile, and F. Bernelli-Zazzera. Interplanetary and lunar transfers using libration points. In 18th International Symposium on Space Flight Dynamics, Munich, Germany, October 2004. K. Uesugi. Japanese first double lunar swingby mission ’HITEN’. Acta Astronautica, 25(7):347–355, 1991. D. A. Vallado. Fundamentals of Astrodynamics and Applications. McGraw-Hill Companies, Inc., 1997.