Class Notes 10: MULTI-PARAMETER ITERATION(CONTINUED
advertisement

Class Notes 10: MULTI-PARAMETER ITERATION(CONTINUED)
AND THE STEEPEST DESCENT METHOD.
Math 639d
Due Date: Nov. 6
(updated: October 30, 2014)
We continue the analysis of the multi-parameter iteration in the case when
A is symmetric and positive definite and we have bounds on the spectrum,
0 < λ0 ≤ λ ≤ λ∞ , for all λ ∈ σ(A).
In the last class, we used the Chebyshev polynomials to develop a polynomial for multi-parameter iteration. Specifically, we set
(10.1)
RM (x) =
where
eM (λ) = TM (x(λ))
R
(10.2)
and
(10.3)
eM (x)
R
= 1 + xQM −1 (x)
eM (0)
R
x(λ) = −1 +
2
(λ − λ0 ).
λ∞ − λ0
In this class, we shall show that this is the optimal choice (assuming that
we only know information about the largest and smallest eigenvalue) and
estimate the resulting spectral radius ρ(GM ). That this is the optimal choice
is the conclusion of the following theorem.
Theorem 1. Let QM −1 be as above and set
(10.4)
ρ=
max
λ∈[λ0 ,λ∞ ]
|1 + λQM −1 (λ)|.
If Q is any other polynomial of degree M − 1, then
η=
max
λ∈[λ0 ,λ∞ ]
|1 + λQ(λ)| ≥ ρ.
Proof. Suppose to the contrary that η is less than ρ. Consider the polynomial
P (λ) = (1 + λQM −1 (λ)) − (1 + λQ(λ)) =: RM (λ) − R(λ). Now RM (λ) has
M + 1 extreme points in the interval [λ0 , λ∞ ] with oscillating sign. As η
is less than ρ, the sign of P (λ) = RM (λ) − R(λ) is the same as RM (λ) at
each of these points. This implies that P (λ) has at least M distinct zeroes
in the interval [λ0 , λ∞ ]. It also vanishes at λ = 0, i.e., PM has at least
M + 1 distinct zeroes. This implies that PM is the zero polynomial and is a
contradiction to the assumption that η is strictly less than ρ.
1
2
Remark 1. To implement the multi-parameter iteration, we need to compute
the parameters {τ1 , τ2 , . . . , τM } corresponding to our optimal QM −1 . Recall
from the previous class that τi = 1/ri , where ri is the i’th root of RM . The
roots of RM can be computed from those of PM because of (10.1)-(10.3). The
roots of PM can be computed from the zeroes of cos, indeed, we recall that
TM (x) = cos(M cos−1 (x)) for x ∈ [−1, 1]
and is zero when
M cos−1 (xj ) = (j − 1/2)π or xj = cos((j − 1/2)π/M ),
j = 1, 2, . . . , M.
To compute the corresponding values of λ, we simply use the inverse of the
linear map λ → x(λ) given in (10.3), specifically,
λ(x) = λ0 +
and obtain
λ∞ − λ0
(x + 1)
2
λ∞ − λ0
(xj + 1)
2
λ∞ − λ0
(cos((j − 1/2)π/M ) + 1).
= λ0 +
2
ri = λ0 +
Remark 2. (Warning) Once we have the parameters {τ1 , τ2 , . . . , τM }, the
multi-parameter iteration is as given by (9.1) of the previous class. This leads
to an effective iteration method provided that M is not too large. However,
stability problems have been observed using this implementation and large
M for certain applications. Alternatively, it is possible the develop an implementation based on the three term recurrence satisfied by the Chebyschev
polynomials. This implementation avoids explicit use of the zeroes of RM
and appears to be more stable. The recurrence implementation was popular
until the discovery of the conjugate gradient method (CG) (developed in the
next class). By in large, in practice, the above method has been replaced
by CG. We study the multi-parameter method here as the results which we
obtain for it will form the basis for the analysis of CG.
The above theorem shows that QM −1 is the best polynomial given only
the bounds λ0 , λ∞ on the spectrum. We are left to estimate ρ(GM ) for this
choice of QM −1 . In the previous class we observed that
ρ(GM ) ≤
max
λ∈[λ0 ,λ∞ ]
|1 + Q̃M −1 (λ)| =
with
x(0) = −1 −
1
eM (0)|
|R
=
1
|TM (x(0))|
2
λ∞ + λ0
λ0 = −
=: −γ.
λ∞ − λ0
λ∞ − λ0
3
Since the highest order term in TM has a positive coefficient, TM (x) is strictly
increasing for x > 1 so TM (x) > TM (1) = 1 (we already observed that TM (x)
was monotone on either side of (−1, 1)). Moreover, TM is either an even or
an odd polynomial so |TM (−γ)| = TM (γ) (note that γ > 1). We need a
more convenient expression for TM (γ) when γ > 1 ( (9.7) of the previous
class is not valid for such values of γ). Instead, we consider the formula
(10.5)
TM (γ) = cosh(M cosh−1 (γ)).
That this is a valid expression for TM (γ) when γ > 1 is shown by showing
that it gives the right polynomials for M = 0 and M = 1 and satisfies the
recurrence relation (9.8), i.e., one checks that
cosh(0 cosh−1 (x)) = 1
cosh(cosh
−1
(x)) = x
(obvious),
(obvious),
cosh((M + 1) cosh−1 (x)) = 2x cosh(M cosh−1 (x))
− cosh((M − 1) cosh−1 (x)).
The derivation of the recurrence relation above is similar to the argument
used in showing that the formula (9.7) satisfies the recurrence (9.8) but uses
the analogous identities involving hyperbolic functions.
Using (10.5) gives for θ = cosh−1 (γ),
1
1
eM θ + e−M θ
≥ eM θ = (eθ )M
2
2
2
p
M
1
1
M
= (cosh(θ) + sinh(θ)) = γ + γ 2 − 1 ,
2
2
where we used the identity
q
sinh(θ) = cosh2 (θ) − 1.
TM (γ) = cosh(M θ) =
Let K = λ∞ /λ0 then γ = (K + 1)/(K − 1) so
√
√
p
K
K + 1)2
(
K
+
1
+
2
√
= √
γ + γ2 − 1 =
K −1
( K + 1)( K − 1)
√
K +1
=√
.
K −1
Combining the above inequalities gives
√
K −1 M
1
≤2 √
ρ(GM ) =
.
TM (γ)
K +1
We have proved the following theorem.
4
Theorem 2. (Multi-Parameter) Let A be a symmetric and positive definite
n × n real matrix whose spectrum satisfies 0 < λ0 ≤ λ ≤ λ∞ , for all λ ∈
σ(A). Let RM be defined by (10.1)-(10.3) and τi , i = 1, . . . , M be defined
by Remark 1. Then the multi-parameter iteration defined by (9.1) has a
reduction matrix GM satisfying
√
K −1 M
ρ(GM ) ≤ 2 √
K +1
where K = λ∞ /λ0 . Moreover,
Y
√
M
K −1 M
(10.6)
kGM k = (I − τj A) ≤ 2 √
K +1
j=1
where k · k is the operator norm induced by either of the norms k · kℓ2 or k · kA
on Rn .
Remark 3. The convergence rate depends on the bounds for the spectrum.
Better bounds (i.e., λ0 closer to λ1 and λ∞ closer to λn ) give rise to smaller
K and a faster rate of convergence.
Remark 4. Suppose that we actually use λ0 = λ1 and λ∞ = λn . Then K
is the spectral condition number of A. The optimal one parameter iteration
has a reduction bound given by
K −1
2
ρ=
≈1− .
K +1
K
We saw that this required O(K) iterative steps to obtain a fixed error reduction ǫ. In contrast, the reduction per iteration for the multi-parameter
iteration limits to
√
K −1
2
≈1− √ .
ρ= √
K +1
K
√
Thus, only O( K) iterations are required in this case.
We saw that the matrices A3 and A5 had condition numbers which were
on the order of h−2 . Accordingly, a one parameter iteration would require
on the order of h−2 iterations for a fixed reduction while a multi-parameter
iteration would only require on the order of h−1 (at least in theory). This
convergence acceleration results in a significant reduction in the number of
iterations when h is small.
Remark 5. As mentioned above, numerical stability is an issue with multiparameter iteration. However, the above results will be used to provide convergence estimates for a much more numerically stable algorithm, the conjugate gradient method. Specifically, we shall use the result (10.6) with the
A-norm.
5
The above theorem carries over to the preconditioned case. Let B be
a symmetric and positive definite matrix. We consider the preconditioned
equations
(10.7)
BAx = Bb
and apply the multi-parameter method (9.1) to it. The reduction matrix is
now of the form
Y
M
(10.8)
GM =
(I − τj BA) .
j=1
The spectrum of GM is related to that of BA as in the simpler case, i.e.,
Y
M
σ(GM ) =
(I − τj λi ) : λi ∈ σ(BA) .
j=1
The eigenvalues of BA are all positive and can be reordered λ1 ≤ λ2 ≤
· · · ≤ λn . Given bounds on λ0 and λ∞ on the spectrum of BA, the multiparameter optimization proceeds exactly as in the simpler case. We have
the following theorem:
Theorem 3. (Multi-Parameter-Preconditioned) Let A and B be symmetric
and positive definite n × n real matrices and assume that the spectrum of
BA satisfies 0 < λ0 ≤ λ ≤ λ∞ , for all λ ∈ σ(BA). Let RM be defined by
(10.1)-(10.3) and τi , i = 1, . . . , M be defined by Remark 1. Then the multiparameter iteration for (10.7) has an reduction matrix GM defined by (10.8)
satisfying
√
K −1 M
ρ(GM ) ≤ 2 √
K +1
where K = λ∞ /λ0 . Moreover,
Y
√
M
K −1 M
√
≤
2
(I
−
τ
A)
(10.9)
kGM k = j
K +1
j=1
where k · k is the operator norm induced by either of the norms k · kA or
k · kB −1 on Rn .
Remark 6. We used the fact that GM is self adjoint in either the A-inner
product or the B −1 inner product and Corollary 1 of Class Notes 7 to conclude the estimates in (10.9).
STEEPEST DESCENT:
Suppose that A is a SPD n × n real matrix and, as usual, we consider
iteratively solving Ax = b. By now, you should understand that the goal of
6
any iterative method is to drive down (a norm of) the error ei = x − xi as
rapidly as possible. We consider a method of the following form:
xi+1 = xi + αi pi .
Here pi ∈ Rn is a “search direction” while αi is a real number which we are
free to choose. It is immediate (subtract this equation from x = x) that
(10.10)
ei+1 = ei − αi pi .
We also introduce the “residual” ri = b − Axi . A simple manipulation shows
that
ri = Aei and ri+1 = ri − αi Api .
The first method that we shall develop takes pi to be the residual ri . The
idea is then to try to find the best possible choice for αi . Ideally, we should
choose αi so that it results in the maximum error reduction, i.e., kei+1 k
should be as small as possible. For arbitrary norms, this goal is not a viable
one. The problem is that we cannot assume that we know ei at any step
of the iteration. Indeed, since we always have xi available, knowing ei is
tantamount to knowing the solution since x = xi + ei .
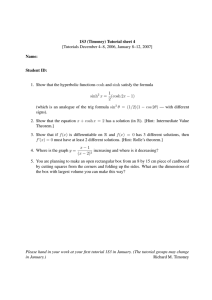
It is instructive to see what happens with the wrong choice of norm.
Suppose that we attempt to choose αi so that kei+1 kℓ2 is minimal, i.e.,
kei+1 kℓ2 = min kei − αri kℓ2 .
α∈R
The above problem can be solved geometrically and its solution is illustrated
in Figure 1. Clearly, αi should be chosen so that the error ei+1 is orthogonal
to ri , i.e.,
(ei+1 , ri ) = 0.
A simple algebraic manipulation using the properties of the inner product
and (10.10) gives
(10.11)
(ei − αi ri , ri ) = (ei , ri ) − αi (ri , ri ) = 0 or αi =
(ei , ri )
.
(ri , ri )
Of course, this method is not computable as we do not know ei during the
iteration so the numerator in the definition of αi in (10.11) is not available.
We can fix up the above method by introducing a different norm, actually,
we introduce a different inner product. Recall, that from earlier classes, inner
products not only provide norms but they give rise to a (different) notion
of angle. We shall get a computable algorithm by replacing the ℓ2 inner
product above with the A-inner product, i.e., we define
(10.12)
kei+1 kA = min kei − αri kA .
α∈R
7
ei
e i+1
αi r i
Figure 1. Minimal error
The solution of this problem is to make ei+1 A-orthogonal to ri , i.e.,
(ei+1 , ri )A = 0.
Repeating the above computations (but with the A-inner product) gives
(10.13)
(ei − αi ri , ri )A = 0 or αi =
αi =
(Aei , ri )
(ei , ri )A
, i.e.,
=
(ri , ri )A
(Ari , ri )
(ri , ri )
.
(Ari , ri )
We have now obtained a computable method. Clearly, the residual ri =
b − Axi and αi are computable without using x or ei . We can easily check
that this choice of αi solves (10.12). Indeed, by A-orthogonality and the
Schwarz inequality,
(10.14)
kei+1 k2A = (ei+1 , ei+1 )A = (ei+1 , ei − αri + (αi − α)ri )A
= (ei+1 , ei − αri )A ≤ kei+1 kA kei − αri kA
holds for any α ∈ R. Clearly if kei+1 kA = 0 then (10.12) holds. Otherwise,
(10.12) follows by dividing (10.14) by kei+1 kA .
The algorithm which we have just derived is known as the steepest descent
method and is summarized in the following:
8
Algorithm 1. (Steepest Descent). Let A be a SPD n × n matrix. Given an
initial iterate x0 , define for i = 0, 1, . . .,
xi+1 = xi + αi ri ,
ri = b − Axi ,
and
(10.15)
αi =
(ri , ri )
.
(Ari , ri )
Proposition 1. Let A be a SPD n × n matrix and {ei } be the sequence of
errors corresponding to the steepest descent algorithm. Then
K −1
kei+1 kA ≤
kei kA
K +1
where K is the spectral condition number of A.
Proof. Since ei+1 is the minimizer
kei+1 kA ≤ k(I − τ A)ei kA
for any real τ . Taking τ = 2/(λ1 + λn ) as in the proposition of Class Notes
7 and applying that proposition completes the proof.
Remark 7. Note that λ1 and λn only appear in the analysis. We do not need
any eigenvalue estimates for implementation of the steepest descent method.
Remark 8. As already mentioned, it is not practical to attempt to make
the optimal choice with respect to other norms as the error is not explicitly known. Alternatively, at least one application of A can eliminate this
drawback, for example, one could design a method which minimized
kAei kℓ2 .
One could also propose to minimize some other norm, i.e.,
kAei kℓ∞ .
Although this is feasible, since the ℓ∞ norm does not come from an inner
product, the computation of the parameter αi ends up being a difficult nonlinear problem.
It is interesting to note that the Steepest Descent Method is the first
example (in this course) of an iterative method that is not a linear iterative method. Note that ei+1 can be theoretically expressed directly from ei
(without knowing xi or b) since one simply substitutes ri = Aei to compute
αi and uses
ei+1 = ei − αi ri .
9
Thus, there is a mapping ei → ei+1 however it is not given by matrix multiplication. This can be illustrated by considering the 2 × 2 matrix
1 0
A=
.
0 2
For either e10 = (1, 0)t or e20 = (0, 1)t , a direct computation gives ej1 = (0, 0)t ,
for j = 1, 2 where ej1 is the error after one step of steepest descent is applied
to ej0 . For example, for e0 = e10 , r0 = Ar0 = (1, 0)t , α0 = 1 and e1 = e0 −r0 =
(0, 0)t . In contrast, for e0 = e10 + e20 = (1, 1)t , we find
5
1
1
Ae0 = r0 =
,
Ar0 =
,
α0 =
2
4
9
4/9
0
0
e1 =
6=
+
= e11 + e21 .
−1/9
0
0