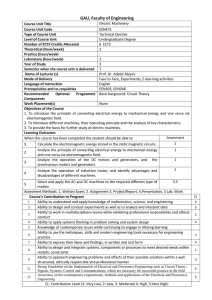
Electrical Machines
advertisement

Electric Machinery and Apparatus 2 AE1M14SP2 Miroslav Chomát chomat@fel.cvut.cz room B3-248 Course Overview • • • • Introduction Review of basic principles Transformers Rotating electric machines – – – – Induction machines Synchronous machines DC machines Switched reluctance machines • Variable-speed drives (introduction) Objectives This course should help you • understand principles behind electric machinery • know construction of electrical machinery • know basic material properties used in electric machinery • describe electric machinery using mathematical tools • know properties and characteristics of individual types of electric machinery • choose proper type of machine for particular application Organization • Lectures – once a week – slides online – discussion • Laboratories – measurements on electrical machines – individual preparation – reports • Individual work – reading – modelling (MATLAB/Simulink) Literature • S. J. Chapman, Electric Machinery Fundamentals. McGrawHill, Inc. 2011 • D. W. Novotny, T. A. Lipo, and T. M. Jahns, Introduction to Electric Machines and Drives. Madison, USA: WisPERC, 2009. • A. E. Fitzgerald, C. Kingsley jr., and S. D. Umans, Electric Machinery. New York, USA: McGraw-Hill, 2003. • P. C. Krause, O. Wasynczuk, and S. D. Sudhoff, Analysis of Electric Machinery. New York, USA: IEEE Press, 1994. • W. Leonhard, Control of Electrical Drives. Berlin, Germany: Springer, 1996. • D. W. Novotny and T. A. Lipo, Vector Control and Dynamics of AC Drives. Oxford, UK: Clarendon Press, 1996. Motivation • Applications – – – – – industry transportation generation homes automobiles • Performance – 10-6 – 109 W – 10-9 – 107 Nm – 10 – 105 rpm Electrical Machinery • Electromechanical energy conversion – based on electromagnetic induction • Types – Motors – Generators – Transformers Electromagnetic Energy Conversion Energy Efficiency Output power η= Input power Mechanical Loads Characteristics • constant – lift – crane – friction in bearing • linear – viscous friction • non-linear – pump – fan – vehicle Normally – combination of two or all of them! Equation of Motion dω J = Tem − Tload dt Maxwell Equations • Ampère’s Law: • Faraday’s Law of induction: • Gauss’s Law for magnetism: • Gauss’s Law for electricity: • 𝐁𝐁 = 𝜇𝜇𝐇𝐇 • 𝐃𝐃 = 𝜀𝜀𝐄𝐄 • 𝐉𝐉 = 𝛾𝛾𝐄𝐄 𝑟𝑟𝑟𝑟𝑟𝑟 𝐇𝐇 = 𝐉𝐉 + 𝑟𝑟𝑟𝑟𝑟𝑟 𝐄𝐄 = − 𝑑𝑑𝑑𝑑𝑑𝑑 𝐁𝐁 = 0 𝑑𝑑𝑑𝑑𝑑𝑑 𝐃𝐃 = 𝜌𝜌 ∂ 𝜕𝜕𝜕𝜕 ∂ 𝜕𝜕𝜕𝜕 𝐁𝐁 𝐃𝐃 Maxwell Equations • • • • • • • • • H: magnetic field density [A·m-1] J: current density [A·m-2] D: electric displacement field [C·m-2] E: electric field intensity [V·m-1] B: magnetic flux density [T] 𝜌𝜌: free electric charge density [C·m-3] μ: permeability [H·m-1] ε: permittivity [F·m-1] γ: conductivity [Ω-1·m-1] Maxwell Equations • Ampère’s Law: ∫ H ⋅ dl = ∫∫ J ⋅ dS C S • Faraday’s Law of induction: ∂B ∫C E ⋅ dl = −∫S ∂t ⋅ dS • Gauss’s Law for magnetism: ∫ B ⋅ dS = 0 S • Gauss’s Law for electricity: ∫ D ⋅ dS = ∫ ρ dv S v Magnetic Circuit Ampère’s Law ∫ H ⋅ dl= ∑ I= Fm ls For H = const.: Fm = H l s = N I For B = const.: Φ = B ⋅ SΦ ls H ⋅ l s = H ⋅ µS Φ ⋅ µS Φ Hopkinson’s Law For H, B = const., μFe >> μ0: Fm = Φ ⋅ Rm Magnetic circuit with air gap lFe δ Fm = Φ(RmFe + Rmδ ) = H Fe l Fe + H δ δ Analogy – Magnetic x Electric Electromagnetic Induction Faraday’s Law of induction dψ ∫ E ⋅ dl = − dt = e = −ui ψ = 2 Wb · 4 + 1 Wb · 3 + 1 Wb · 1 = 12 Wb ∂ψ ∂ψ dt + dx dψ = ∂t ∂x e=− dψ ∂ψ ∂ψ = − + v dt ∂x ∂t Lorentz Force fm = −i ⋅ dΨ dx − fm = B ⋅ i ⋅ l = F i l ×B ( ) Electromagnetic Induction − e = ui = B ⋅ l ⋅ v Magnetization curve Permanent Magnets Permanent Magnets Rotating Magnetic Field My questions • • • • • What is your name? Where are you from? What is your current knowledge on EMs? What made you take this course? What would you like to know about EMs?