Project 2 – feasibility study 1. Estimation of the wing and thrust
advertisement

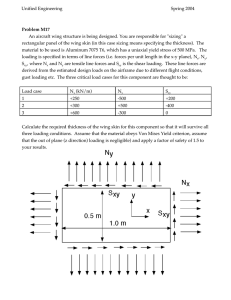
Wydział Mechaniczny Energetyki i Lotnictwa Politechniki Warszawskiej - Zakład Samolotów i Śmigłowców Project 2 – feasibility study This project consists of two parts: 1) Estimation of the wing and thrust (power) loading 2) Costs analysis 1. Estimation of the wing and thrust (power) loading It is the most convenient to estimate wing loading (W/S) and thrust loading (W/T) of the future aeroplane with application of the plot presenting thrust loading as a function of wing loading for assumed requirements (Fig.1). B A Fig.1 Example of the inverted thrust loading as a function of a wing loading. Lines presented in this plot represent equations describing assumed requirements. White area (Fig.1) constrained by these lines represent wing and thrust loading combinations satisfying assumed requirements. Preparation of the plot begins from an arbitrary assumed range of wing loadings (W/S). This range of wing loadings should cover wing loadings observed during trends analysis. One has to calculate and draw curves T/W=f(W/S) resulting from certain requirements. At the end decision has to be made which point from the area of satisfactory solutions will be the most advantageous for designed aeroplane. Taking takeoff weight estimated in the first project and wing and thrust loading defined here one can calculate wing reference area and powerplant thrust or power. As a result certain propulsion system can be selected. Quite frequently requirements appear contradictory. Designer has to decide which of them is more important in such cases. For example wing loading optimal for cruise usually is greater Cezary Galiński - Materiały pomocnicze: Feasibility study 1/6 Wydział Mechaniczny Energetyki i Lotnictwa Politechniki Warszawskiej - Zakład Samolotów i Śmigłowców than maximum wing loading allowed by landing distance requirement. The longest landing distance requirement has to be satisfied first since the aeroplane can land only on existing (defined) airstrips. In the case of a contradiction with legal airworthiness regulations, regulations are always more important since any aeroplane has to satisfy these regulations if legal operations are predicted. One is not forced to quit any requirements completely since the closest allowed solution can be always chosen. For example maximum wing loading allowed by maximum landing distance requirement (pt. B in the Fig.1) can be selected in the problem described above. On the other hand point A should be selected if designer has to apply the weakest engine available. In the case of propeller driven aeroplane power can be considered instead of the thrust. It is possible to replace thrust in any equation by the following formula: η# V where: T – powerplant thrust N – powerplant power η - propeller efficiency (0,8 can be assumed for constant RPM propellers) T= (1) 1.1 Takeoff Maximum takeoff distance requirement can be analyzed with application of the following empirical formula: T ≥ W 1 1 W 0,133 ⋅ S TO C L max σ s TO 1 1 W − 3,834 ⋅ S TO C L max σ # # (2) where: W– S– T– CLmax – σSTO – weight wing reference area thrust maximum lift coefficient of the aeroplane air density ratio (air density at the airport altitude / air density at the sea level), σ=1 can be assumed in the current project takeoff distance Takeoff distance should be assumed considering the aeroplane type and dimensions of the airstrips where the aeroplane is supposed to operate. Maximum lift coefficient of the clean wing can be estimated with application of Fig.2. Cezary Galiński - Materiały pomocnicze: Feasibility study 2/6 Wydział Mechaniczny Energetyki i Lotnictwa Politechniki Warszawskiej - Zakład Samolotów i Śmigłowców (a) (b) Fig.2 (a) maximum lift coefficient as a function of the airfoil thickness and (b) airfoil thickness as a function of the Mach number. (Corke) High lift device type (takeoff) CLmax High lift device type (landing) CLmax Fig.3 High lift devices effect on maximum lift coefficient. (Abbot and Denhoff ) Cezary Galiński - Materiały pomocnicze: Feasibility study 3/6 Wydział Mechaniczny Energetyki i Lotnictwa Politechniki Warszawskiej - Zakład Samolotów i Śmigłowców Effect of high lift devices application can be estimated with help of Fig.3. Please note that smaller deflections are usually applied for takeoff and greater for landing. The reason for this is a need for lower drag in the case of takeoff. Therefore it can be assumed that configurations presented on the left side of the Fig.3 are takeoff configurations and these presented on the right side are landing configurations. Moreover increase of the maximum lift coefficient exists only on this part of the wing where high lift devices are installed. Therefore it should be reduced proportionally to the ratio of the wing area with high lift device to the total wing area. 1.2 Landing Similarly to the takeoff maximum landing distance requirement can be analyzed with application of the following empirical formula: W σC L max (s L − 122 ) ≤ S 0.75 # m2 (3) Thrust loading does not appear in this formula because landing is performed with powerplant working in idle mode, therefore available thrust is not relevant. As a result requirement of the maximum landing distance appears as a vertical line on Fig.1, i.e. for any T/W, W/S is the same. Values of sL, CZmax and σ can be estimated as previously. ATTENTION: Wing loading calculated from equation (3) is performed at the end of the flight when fuel tanks are almost empty, therefore it is not comparable with wing loading during takeoff. One has to calculate the wing loading during takeoff that allows obtaining wing loading from formula (3) during landing. It can be done with application of the following procedure: 1) Calculate landing (W/S)L from formula (3) 2) Calculate wing area with application of landing (W/S)L and landing weight from the formula: S= WL W S L (4) 3) Calculate takeoff (W/S)TO with application of formula W W = TO SL S TO (5) Wing loading described by equation (5) can be presented at the Fig.1. The maximum landing distance requirement will be satisfied if current wing loading is smaller than calculated above. Cezary Galiński - Materiały pomocnicze: Feasibility study 4/6 Wydział Mechaniczny Energetyki i Lotnictwa Politechniki Warszawskiej - Zakład Samolotów i Śmigłowców 1.3 Climb rate An aeroplane usually climbs after takeoff. Quite frequently the climb rate is an important requirement because of air traffic management and safety. Therefore airworthiness regulations specify climb rates for some aeroplane types and configurations. Climb rate may be determined also by its application. Climbing can be described by the following equation: 2 1 W T W qC D 0 + =0 − −G S S qπAe W (6) where : G = sinγ dH/dt – climb rate A – wing aspect ratio (from project 1) e ~ 0,8 – Oswald coefficient q = ρV2/2 – dynamic pressure It can be assumed that the largest climb rate is achieved for airspeeds equal approximately Vmin+0,25(Vmax-Vmin), Vmax can be taken from trends analysis (project 1), Vmin and dH/dt from trends analysis or from airworthiness regulations (e.g. CS 22.49, CS 22.65, CS 23.49, CS 23.65, CS 25.117, CS VLA 49, CS VLA 65) ATTENTION: Some regulations contain requirements not only for maximum climb rates (e.g. CS 25.121). Solving the equation (6) for W/S gives: 2 C T T − G − 4 D0 − G ± πAe W W W = 2 S qπAe (7) That means equation (6) makes sense only for T/W greater than: C D0 T ≥G+2 W πAe (8) This condition can be put on the Fig.1 as a horizontal line to make sure that the final plot is reasonable. However it is not a line representing the climb rate requirement yet. One can obtain necessary formula by solving the equation (6) for T/W: T S W 1 + G ≥ qC D 0 + W W S qπAe (9) This line should be also put on the Fig.1. Cezary Galiński - Materiały pomocnicze: Feasibility study 5/6 Wydział Mechaniczny Energetyki i Lotnictwa Politechniki Warszawskiej - Zakład Samolotów i Śmigłowców 1.4 Minimum airspeed Minimum airspeed is very important requirement since flying below this airspeed leads to the stall. Equation for minimum airspeed requirement can be derived directly from the equation for the lift force: W ≤ q ⋅ CL S (10) As previously q is a dynamic pressure, however airspeed necessary to calculate it is equal to the minimum airspeed that can be taken from trends analysis or airworthiness regulations (e.g. CS 22.49, CS 23.49, CS VLA 49). Because of safety reasons it is recommended to apply slightly reduced lift coefficient 1,1*CL = CLmax 1.5 Cruise and other conditions Some requirements result not from regulations or available resources but from the aeroplane mission. Cruise efficiency can be given as an example as well as maximum airspeed or maximum turn rate etc. Fig.1 should contain all relevant requirements of this kind. Some useful equations can be found in the file „useful equations”. Let’s analyze cruise efficiency here. In the case of propeller driven aeroplanes maximum range will be achieved for: W = q π ⋅ A ⋅ e ⋅ CD 0 S (11) In the case of jet aeroplanes: C D0 πAe W =q S 3 (12) In both cases airspeed for dynamic pressure calculation can be taken from trends analysis since certain cruise airspeed is also frequently required. ATTENTION: In both cases cruise wing loading is not comparable with takeoff wing loading, therefore similar procedure has to be applied as in the case of landing. The only difference is that wing loading (W/S)Cruise calculated from equations (11) or (12) refers to the weight achieved in the middle of the flight, hence WCruise = WTO – 0,5Wfuel 2. Cost analysis Cost analysis should be prepared with application of the method presented in T. Corke „Design of Aircraft” Chapter 12. Cezary Galiński - Materiały pomocnicze: Feasibility study 6/6