Development and Validation of Aggregated Models for Thermostatic
advertisement

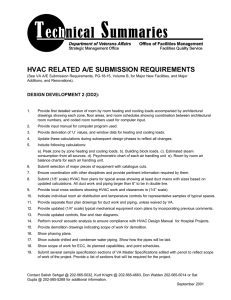
2012 45th Hawaii International Conference on System Sciences Development and Validation of Aggregated Models for Thermostatic Controlled Loads with Demand Response Karanjit Kalsi Marcelo Elizondo Jason Fuller Shuai Lu Pacific Northwest National Laboratory karanjit.kalsi@pnnl.gov marcelo.elizondo@pnnl.gov jason.fuller@pnnl.gov shuai.lu@pnnl.gov david.chassin@pnnl.gov Abstract real-time prices combined with enabling technology to "signal" loads when supply is scarce (prices are high) or supply is plentiful (prices are low). If prices are updated frequently and load controls are highly interactive, then loads can become as effective at following intermittent generation as standard generation is at following changing load, without adversely affecting consumers. The development of advanced smart grid simulation tools, such as GridLAB-D [4], provides a platform to design and test these smart grid asset models. While many of the smart grid technologies proposed involve assets being deployed at the distribution level, most of the significant benefits accrue at the transmission level. However, the size and complexity of typical distribution systems makes direct integration with transmission models computationally intractable. It is, therefore, important to be able to represent distributed smart grid assets using reduced-order models. The developed models will, for the first time, provide industry with a suite of analysis tools and results that can be used to design, improve, and validate smart grid control strategies and ensure bulk power system stability, reliability and security. For example, aggregated load models can be used to quickly predict load reduction obtained by a control signal from the utility control center to compensate for a change in renewable generation. An understanding of load population dynamics through adequate modeling is essential to extract the potential of load control for a successful implementation of the smart grid. Dynamic modeling of thermostatic controlled loads was first studied in [5] and [6]. In [5], aggregate load models are designed to study the effects of cold load pickup after a service interruption. Functional models of devices, which account for factors such as weather and human behavior, are developed in [6]. A model of a large number of similar devices is then obtained through statistical aggregation of the individual component models. In [7] and [8], aggregated dynamic homogenous and non-homogeneous models are developed for thermostatic loads. The main One of the salient features of the smart grid is the wide spread use of distributed energy resources (DERs) like small wind turbines, photovoltaic (PV) panels, energy storage (batteries, flywheels, etc), Plug-in Hybrid Electric Vehicles (PHEVs) and controllable end-use loads. The affect of these distributed resources on the distribution feeder and on transmission system operations needs to be understood. Due to the potentially large number of DERs that are expected to be deployed, it is impractical to use detailed models of these resources when integrated with the transmission system. This paper focuses on developing aggregated models for a population of Thermostatic Controlled Loads (TCLs) which are a class of controllable end-use loads. The developed reduced-order models are validated against simulations of thousands of detailed building models using an open source distribution simulation software (GridLAB-D) under both steady state and dynamic conditions (thermostat setback program as a simple form of demand response). 1. Introduction Large-scale deployment of intermittent nondispatchable generation by the year 2030 will require a transformation in the control of smart-grid assets such as demand response, distributed generation, energy storage, and distribution automation. The development of the smart grid concept has given rise to the notion that instead of trying to regulate the system by controlling generation, the focus should be to control demand to the extent possible. Direct load control programs can be effective in providing peak load management and are used by many utilities as shown in [1]. Another approach that has been tested in [2] and [3] and that shows promise is the use of Pacific Northwest National Laboratory is operated by Battelle Memorial Institute for the US Department of Energy under Contract DOE-AC06-76RLO 1830. 978-0-7695-4525-7 2012 U.S. Government Work Not Protected by U.S. Copyright DOI 10.1109/HICSS.2012.212 David Chassin 1959 contribution of [9] is to develop a finite dimensional aggregated state space model for air conditioning loads based on solving bilinear PDEs model. It is shown that an order of 200 is needed for the aggregated state space to accurately capture the detailed model dynamics. In [10], a survey is presented of different load control programs for providing various power system services. The focus of this paper is to design and validate aggregated models for a class of thermostatic controlled end-use loads. One approach to develop reduced-order models for TCLs like Heating, Ventilation and Cooling (HVAC) and water heaters is to use state transition diagrams to represent the behavior of a population of devices as in [11]. The first step is to construct a physical model representing the dynamics of different end use loads. A state transition diagram can then be created from the physical model with the transition rates being a function of the physical and environmental parameters and control actions. After having obtained the state transition diagram, a state-space model representing the dynamics of device occupancy in each state can then be constructed. Based on the number of devices in each state, the total power consumption of the devices can be estimated. The developed models are shown to capture both the steady-state and dynamic (with demand response) behavior of the device population. The state space models are validated against simulations of 10,000 building models in GridLAB-D both for the case without demand response, and with a thermostat setback program as a simple form of demand response. An illustration of the computational advantages of the aggregated load model is also given. In this paper, Section 2 will discuss the physical model of thermostatic loads. In Section 3, aggregate models for heating/cooling loads will be derived, and in Section 4, validated against GridLAB-D simulations. In Section 5, conclusions and future research are discussed. air-conditioning. Thermostatic loads at the level of a single device give rise to pulse sequences where the pulse width and frequency arise from the control hysteresis and the heat balance in the load, while the power drawn changes between two or more relatively fixed values. The thermal model, adapted from [4], representing such individual device loads is shown in Figure 1. Figure 1. Thermal model of home heating/cooling system The formulation for this particular model is given as follows: dTa 1 = [Tm H m − Ta (U a + H m ) + Qa + ToU a ] dt Ca (1) dTm 1 = [H m (Ta − Tm ) + Qm ] dt Cm Here Ua is the conductance of the building envelope, To is the outdoor air temperature, Ta is the indoor air thermostat setpoint, Qa is the heating/cooling capacity of the HVAC unit, Ca is the thermal mass of the air, Cm is the thermal mass of the building materials and furnishings. For the purposes of this paper it is assumed that the thermal coupling, Hm, between air and mass is perfect, i.e. Ta = Tm and total heat capacity is given by C = Ca + Cm. Taking these assumptions into account, (1) is simplified as follows 2. Physical Model of an Individual Thermostatic Controlled Load Ta − c1Ta = c2 with This section discusses the physical model of an individual load device. This individual device model is the base to develop an aggregated load model representing the behavior of a population of devices in section 3. Residential electric end-use loads can be divided into two principal classes, one for all nonthermostatic loads, such as lights and plugs, and one for all thermostatic loads, such as water heating and c1 = −Ua C c2 = (2) Qa + U aTo . C Integrating the above and using the initial condition of Ta0 gives 1960 Ta (t ) = k1e r1t − steady state (section 3.1) and the transient behavior introduced by demand response (section 3.2). The aggregated load model developed here is valid for a time scale from seconds to hours. The model captures the on/off transitions of devices and temperature dynamics of the population. The aggregated model can be used by system operators to help design and implement demand response programs on a population of thermostatic controlled loads. The aggregated state space load model can be used to simulate collective load behavior without the need of computationally expensive simulations of each individual load. c2 c1 where k1 = Ta 0 + c2 c1 r1 = c1 . and (3) Differentiating the above gives Ta (t ) = Ua − t 1 [U a (To − Ta 0 ) + Qa ]e Cm +Ca . Ca + Cm (4) 3.1. Steady state model The rates of the device turning ON and OFF are given by ron and roff where, roff = 1 [U a (To − Ta 0 ) + Qi + Qs ]e Ca + Cm The state dynamics of a population of heating/cooling units can be derived from a state transition diagram. The units can be in either the on or off state. Each of these states can be further divided into two sub-states, where the loads are satisfied or unsatisfied. The device population can therefore occupy any one of these four states. The objective of the heating unit, for example, is to keep the room temperature at a certain value. The satisfied state is when the room temperature is above the setpoint temperature. When the temperature falls below the setpoint, the unit is said to be in the unsatisfied state. The heating units, in the on state, heat at a certain rate, ron, and move from the unsatisfied to the satisfied state. When the upper control point of the thermostat is reached, the units move from the on satisfied to the off satisfied state. The units then coast at a rate roff to the off unsatisfied state after which they turn on and continue the cycle. The state diagram illustrating the heating cycle of a HVAC system is shown in Figure 2. The dynamics of device occupancy in each state based on the state transition diagram in Figure 2 are given as us us s N off = −ϕN off + ϕN off Ua − t C m + Ca (5) Ua − t 1 ron = [U a (To − Ta 0 ) + Qi + Qs + Qh ]e Cm +Ca Ca + C m where Qi is the heat gain from the internal load, Qs is the solar heat gain and Qh is the heat gain from the heating/cooling system. The rates computed are given in oF/h. Given the thermostat deadband, L, needed for adequate control hysteresis, the time for the on and off cycles is toff = The duty cycle ϕ L roff ; ton = L ron (6) can then be computed as ϕ= roff ton = ton + toff ron + roff (7) In (7), without loss of generality, it can be assumed that ron+ roff = 1, in which case ϕ = roff and 1 - ϕ = ron, a condition necessary to ensure numerical stability in certain finite differences implementation of state models. In the following sections, state space models will be constructed based on this “normalized” physical model. s s N off = −ϕN off + (1 − ϕ ) N ons us us us N on = ϕN off − (1 − ϕ ) N on (8) us N ons = (1 − ϕ ) N on − (1 − ϕ ) N ons Using (4), the state space representation of the steady state dynamics without demand response is given by (9) x = Ax where, 3. Aggregated models for a population of HVAC units Based on the physical model of an individual load discussed in section 2, this section develops a state space model to represent the behavior of a population of HVAC units. The state space model is valid for 1961 us ⎤ ⎡ N off ⎢ s ⎥ N x = ⎢ offus ⎥ ; ⎢ N on ⎥ ⎢ s ⎥ ⎣⎢ N on ⎦⎥ ϕ −ϕ 0 0 roff 0 ⎤ 0 1 − ϕ ⎥⎥ ϕ −1 0 ⎥ ⎥ 1 − ϕ ϕ − 1⎦ . time (t = t2, see Figure 3) the TCL population will be working at a new steady state with corresponding variables ton3, toff3, ron3, roff3, and φ3. Between t0 and t2, most of TCLs switch to one statte (“on” state in the case of the figure), in order to reeach the new steady state, for the period t0 < t < t2; therefore, t the steady state model is not valid for this transient period. A time varying model that swittches characteristics when a temperature setpoint is applied to the population of TCL is proposed. 0 s Noff (10) off roff ron us Noff ⎡− ϕ ⎢ 0 A=⎢ ⎢ϕ ⎢ ⎣ 0 us Non ron unsatisfied Nons on satisfied d Tset Indoorr air temperature Figure 2. State transition d diagram heating/cooling units (heating cycle) Figure 3. Transient dynamics of indoor air temperature in three individual HVAC with a change in setpoint for The time varying model that captures the transient a described by (11). behavior consists of three parts as A steady state model is used beffore the temperature setpoint change is applied (t<t0). A transient model is used between t0 and t1 (t1 loweer than t2, where t2 marks the end of the transien nt period). For t>t1 (passing by t2), the TCL populatiion is described by a second steady state model. 3.2. State space model with deman nd response In this section, a time variant modeel to represent TCL population dynamics when a tempperature setting adjustment is applied to the populatioon is proposed. This model uses the state diagram developed in section 3.1 and notions of the phhysical model discussed in section 2. A populattion of three individual TCLs is considered to explain conceptually the development the time variant model. The time variant model is valid for a laarge population as shown with simulations in section 4. When a step change in temperatuure setting is applied, the population exhibits a trannsient behavior that is not captured by the steadyy state model discussed in Section 3.1. Figure 3 illustrates this transient behavior, displaying the evoluution of inside ambient temperature, Ta, for three indivvidual HVACs with the same temperature settings annd deadbands. To explain the problem conceptually, llet us assume a population of household TCLs in steaddy state with a temperature setting, Tset1, in all loadss, as shown in Figure 3. The inside temperature,, Ta, at each household is within one deadband of Tset1from time t = 0 to t = t0. During this period, the ton1 and toff1 are average steady state values corresponnding to steady state rates (ron, roff) and duty cycle φ1, aas explained in Section 3.1. Let us further assume thaat at t = t0 the temperature setting is changed to Tseet2. After some ⎧ A1 x ⎪ x = ⎨ A2 x ⎪A x ⎩ 3 if if t <= t 0 t 0 < t <= t1 if t1 < t <= t f (11) where, 0 0 ⎤ ⎡− ϕ1 ϕ1 ⎢ 0 −ϕ 0 1 − ϕ1 ⎥⎥ 1 A1 = ⎢ ⎢ ϕ1 0 ⎥ 0 ϕ1 − 1 ⎢ ⎥ 0 1 − ϕ1 ϕ1 − 1⎦ ⎣ 0 ⎡− t on 2 ⎢ 0 A2 = ⎢ ⎢ t on 2 ⎢ ⎣⎢ 0 1962 t on 2 0 − t on 2 0 0 0 − t off 2 t off 2 0 ⎤ t off 2 ⎥⎥ 0 ⎥ ⎥ − t off 2 ⎦⎥ (12) ⎡ −φ3 ⎢ 0 A3 = ⎢ ⎢ φ3 ⎢ ⎣ 0 In (12), φ3 −φ3 0 0 space aggregation model. The HVAC on and off states were aggregated over time for each of the building models, and then compared against the predicted value from the state space aggregate model. The following results should be considered exemplary, but not complete, as work in on-going to further validate the aggregate model under various population and system configurations and demand response programs. 0 ⎤ 1 − φ3 ⎥ ⎥ 0 ⎥ φ3 − 1 ⎥ 1 − φ3 φ3 − 1⎦ 0 0 ϕ1 and ϕ3 are the duty cycles of the HVAC unit corresponding to the original and new temperature setpoints and are computed using (2) – (7). The corresponding state transition matrices, A1 and A3, represent the steady state behavior of the HVAC unit before and after the temperature setpoint change. Parameters ton2 and t1 define the duration and peak of the transient and need to be estimated. These parameters can be derived from (3) where Ta = Tset2, Ta0 = Tset1, and Δt = t2 - t0, which is the estimated duration of the transient. The expression for Δt is given as Δt = ⎛T +c c ⎞ 1 log ⎜ set 2 2 1 ⎟ r1 ⎝ Tset1 + c2 c1 ⎠ 4.1. Steady state model A comparison between a simulated population and the aggregate model when operating at or near a steady state condition (no external air temperature changes and set points are held constant) is shown in Figures 4 - 5. The aggregated load model was developed in section 3.1, while GridLAB-D solves the individual loads described in section 2. The on and off states, whether satisfied or not, are summed together (only the on states are shown). It can be seen that while the aggregate model produces a more smooth response, but in general, the number of units in the on state settles to approximately the same values in both simulations. It should also be noted that in Figures 4 – 5, the GridLAB-D population does not start out exactly at equilibrium, but approaches equilibrium after approximately one hour. This transient is caused by the difficulty in initializing the agent-based simulation with perfectly distributed parameters. This results in a settling time to reach the final steady state. (13) The values of ton2 and t1 can be estimated from Δt as: tˆ1 − t0 = Δt L (14) tˆon 2 = Δt A fraction of Δt (Δt / L), where L is the deadband, is used to estimate t1 because the system needs to switch to model A3 in (11) and (12) before the end of the transient (notice that Δt marks the end of the transient). 3000 GridLAB-D Aggregated 2500 4. Validation of aggregated model against GridLAB-D N ON 2000 To provide for initial validation of the aggregate model, an open source tool, GridLAB-D, was used. GridLAB-D is capable of simultaneously simulating thousands of unique buildings using an equivalent thermal model [12-15] to create a diverse population of building and HVAC system parameters; however the simulations can often take a substantial amount of time and computing resources, especially as the model size increases. In the following experiments, 10,000 building models were created and simulated for a single day. Parameters such as Ua, Cm, Ca, and Hm were randomly varied across the population to provide a certain amount of diversification, and outside weather and internal setpoints were modified at various times to test the performance of the state 1500 1000 500 0 1 2 3 Time (hr) 4 5 6 Figure 4. State dynamics of HVAC units starting at equilibrium with Tset=75 and Tout=77 1963 “saturates”, and all of the HVAC units are forced into the on state. This could be considered an extreme case, where the control signal synchronizes all of the loads and decreases system diversity leading to an extreme rebound in power demand. In both cases, the aggregate model reasonably captures the peak rebound effect and follows the envelope of the population response. 5000 GridLAB-D Aggregated 4500 4000 NON 3500 3000 2500 2000 2500 GridLAB-D Aggregated 1500 1000 0 1 2 3 Time (hr) 4 5 2000 6 Figure 5. State dynamics of HVAC units starting at equilibrium with Tset=75 and Tout=95 NON 1500 1000 4.2. State space model with demand response To test the ability of the state space model to transition between multiple equilibrium points, a simple form of demand response, a thermostat setback program, is explored. The aggregated load model that captures transient behavior was developed in section 3.2. Figures 6 - 7 show a comparison of the number of HVACs in the on state between the state space model and the population model. In these cases, all of the HVACs are participating in a thermostat setback program where the thermostats setpoints are simultaneously shifted up from 75 to 76 º F and 75 to 77 º F, respectively. After the stored thermal energy in the buildings is exhausted, in roughly one hour, the system begins to return to a new steady state with a slightly lower consumption than at the original steady state. Notice that the time frame for which all the units are in the off position is not two times longer for the 2 degree shift versus the 1 degree shift, highlighting some of the non-linear characteristics of the system that are captured by the aggregate model. This also highlights the fact that thermostatically controlled loads are only capable of providing load reduction for a limited amount of time defined by the stored amount of thermal energy within the building. A commonly observed phenomenon associated with demand response programs is often called the “rebound” effect, or an immediate spike in power consumption when the thermostat setback is released back to normal operation. Figures 8 - 9 compare the responses in the two models when a thermostat setback program releases the thermostats back to their natural state, in this case from 75 to 74 ºF in Figure 8 and 75 to 70 ºF in Figure 9. Figure 8 shows the “unsaturated” case, where only a portion of the population immediately switches to the on state. Figure 9 shows the case where the state model 500 0 0 2 4 Time (hr) 6 8 Figure 6. State dynamics of HVAC units with setpoint change from 75 to 77 degrees 2500 GridLAB-D Aggregated 2000 NON 1500 1000 500 0 0 2 4 Time (hr) 6 8 Figure 7. State dynamics of HVAC units with setpoint change from 75 to 76 degrees In the unsaturated case (Figure 8) however, the aggregate model is not able to capture the oscillations set up by the setpoint change. This is due to the fact that the control signal in the population model again synchronizes all of the loads, resulting in a loss of diversification, which takes some time to be reestablished. One of the key assumptions of the state space model is that the thermostatic loads always maintain diversity. Figure 10 demonstrates the effects when the control signal releasing the thermostats back to normal operation is randomly applied over a period of approximately 45 minutes to the different 1964 buildings within the population (e.g. each building receives the release signal at a different time). The inability to capture the effects of loss of diversity is one of the shortcomings of the aggregate model, and will be addressed in future work. 5. Conclusions In this paper, aggregate load models have been developed for thermostatic controlled loads by considering the state dynamics of a large homogenous population of such devices. These models have been initially validated against GridLAB-D simulations. Results show acceptable agreement between the aggregated load model and detailed simulation of 10,000 individual loads. Additionally, the computation time is tremendously reduced when using the aggregated load model as opposed to using detailed numerical simulations of each TCL. Future work will continue to validate the aggregate model under various system parameters and conditions, while employing various control and demand response strategies Additional transition rules and time varying parameters will also be addressed. 10000 GridLAB-D Aggregated 8000 NON 6000 4000 2000 0 0 2 4 Time (hr) 6 8 Figure 8. State dynamics of HVAC units with setpoint change from 75 to 74 degrees 5000 10000 GridLAB-D Aggregated GridLAB-D Aggregated 4500 8000 4000 NON NON 6000 3500 3000 4000 2500 2000 0 0 2000 1500 0 2 4 Time (hr) 6 8 2 4 Time (hr) 6 8 Figure 10. State dynamics of HVAC units with setpoint change from 75 to 74 degrees and random initial start points Figure 9. State dynamics of HVAC units with setpoint change from 75 to 70 degrees 4.3. Computation time 6. References The aggregated load model presents a tremendous improvement in computation time, as compared with the detailed model of a large population of TCLs. The simulations of the TCL population shown in this paper took approximately 20 to 25 minutes. On the other hand, it takes only a fraction of a second for the aggregated load model to run in Matlab. This type of speed improvement is required for applications where simulation of thousands to tens of thousands of distribution system feeder circuits is required. 1965 [1] G. T. Bellarmine, “Load Management Techniques”, in Proc. IEEE Southeastcon 2000, Apr. 2000, pp. 139-145. [2] D.L. Hammerstrom et al. "Pacific Northwest GridWise™ Testbed Demonstration Projects Part I. Olympic Peninsula Project", Available: http://gridwise.pnl.gov/docs/op_project_final_report_pnnl17 167.pdf [3] A. Faruqui and S. Sergici. "Household response to dynamic pricing of electricity: A survey of the experimental evidence," SSRN Report no. 1134132, Social Science Research Network, January 10, 2009 http://papers.ssrn.com/sol3/papers.cfm?abstract_id=1134132. [4] GridLab-D, Residential Module Guide, [Online]. Available: http://sourceforge.net/apps/mediawiki/gridlabd/index.php?titl e=Residential_Module_Guide [5] S. Ihara and F.C. Schweppe, “Physically based modeling of cold load pickup”, IEEE Transactions on Power Apparatus and Systems, 100 (9), pp. 4142-4150, Sept.1981. [6] C.Y. Chong and A.S. Debs, “Statistical synthesis of power system functional load models”, in Proc. of the 18th IEEE Conference on Decision and Control, 264-269, Dec. 1979. [7] R. Malhame and C.Y. Chong, “Electric load model synthesis by diffusion approximation of a high-order hybrid-state stochastic system”, IEEE Transactions on Automatic Control, 30 (9), pp. 854-860, Sept. 1985. [8] D.S. Callaway, “Tapping the energy storage potential in electric loads to deliver load following and regulation with application to wind energy”, Energy Conversion and Management, 50 (5), pp. 1389-1400, May 2009. [9] S. Banash and H. Fathy, “Modeling and Control Insights into Demand-side Energy Management through Setpoint Control of Thermostatic Loads”, American Control Conference, June 2011. [10] D.S. Callaway and I. Hiskens, “Achieving Controllability of Electric Loads”, Proc. of the IEEE, 99 (1), pp. 184-199, Jan. 2011. [11] K. Kalsi, F. Chassin and D. Chassin, “Aggregated Modeling of Thermostatic Loads in Demand Response: A Systems and Control Perspective”, accepted to the 50th IEEE Conference on Decision and Control, Dec. 2011. [12] R. Sonderegger, “Dynamic Models of House Heating Based on Equivalent Thermal Parameters”, Report PU/CES 57, Doctoral Dissertation 1978, Princeton University, Princeton, New Jersey. [13] K. Subbarao, “Thermal Parameters for Single and Multizone Buildings and Their Determination from Performance Data”, Solar Energy Research Institute, 1981, Golden, Colorado. [14] N. W. Wilson, B.S. Wagner and W.G. Colborne, “Equivalent Thermal Parameters for an Occupied Gas-Heated House”, ASHRAE Transactions, 1985, vol. 91, part 2. [15] K.P. Schneider, J.C. Fuller, D.P. Chassin, “Multi-State Load Models for Distribution System Analysis,” to be published IEEE Transactions on Power Systems, May 2011. 1966