Bubbler design for reservoir destratification
advertisement

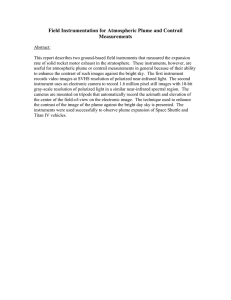
CSIRO PUBLISHING www.publish.csiro.au/journals/mfr Marine and Freshwater Research, 2003, 54, 271–285 Bubbler design for reservoir destratification Goloka Behari SahooA,D and David LuketinaB,C A University of Hawaii, Department of Civil & Environmental Engineering, 2540 Dole Street, 383 Holmes Hall, Honolulu, HI, 96822, USA. B Asian Institute of Technology, School of Civil Engineering, Water Engineering and Management Program, PO Box 4, Klong Luang, Pathumthani, 12120, Thailand. C Water Resources Division, Ondeo Services, Technology and Research Center, Paris, 38 rue du President Wilson, Le Pecq-sur-Seine, 78230, France. D Corresponding author. Email: goloka@hawaii.edu Abstract. Two important bubbler-performance criteria, the mechanical efficiency, ηmech, and the destratification time, Γ, were analysed as functions of two dimensionless parameters, G, the strength of stratification, and M, the source strength. Equations to estimate the optimum airflow rate (via M) and corresponding ηmech and Γ for a known linear stratification G in a reservoir were derived. Owing to difficulties in accurately determining the actual G, it was demonstrated that it is appropriate practice to reduce the design G value by around 10%. It was shown that the equivalent linear stratification method might lead to sub-optimal design for stratification profiles that deviate substantially from a linear profile. Rather, a bubble-plume model should be applied. Finally, the effects of incorporating changes in bubble radius in a bubble-plume model were examined. ηmech and Γ were found to be relatively insensitive to bubble radius; however, the ideal bubble size for maintaining a suitable oxygen dissolution efficiency is 1 mm. MF02 45 GBu. bB.leS-aphluomaendbeDh.aLviuokertiand estraifcation Extra keywords: gas transfer, mechanical efficiency, thermal stratification, water quality. Introduction Thermal stratification commonly occurs in deep lakes and reservoirs. As a result, the denser bottom hypolimnetic water gets isolated from the lighter surface epilimnetic water and commonly undergoes substantial oxygen depletion. In turn, the oxygen depletion leads to water quality problems. In such cases, artificial mixing can be used to counter these effects. Of the various artificial mixing methods used, air bubblers, where compressed air is continuously injected through a diffuser set at or near the bottom of the reservoir, are one of the most common (McDougall 1978; Asaeda and Imberger 1993; Schladow 1993; McGinnis and Little 1998). In a bubble plume, the rising air bubbles entrain the ambient water and form an air–water mixture plume. As the bubbles rise, there is a continuous increase of buoyancy resulting from their volumetric expansion due to reduction of hydrostatic pressure. However, as has been shown experimentally by McDougall (1978) and Asaeda and Imberger (1993) for a stratified ambient environment, the © CSIRO 2003 entrained fluid bubble mixture eventually becomes heavy compared with the surrounding ambient fluid as the plume rises, resulting in the centreline velocity becoming zero. The entrained fluid then forms a lateral outflow, which sinks to its neutral-buoyancy level. The air bubbles, however, continue to rise and form a new plume at the point of detrainment. This entrainment and detrainment process, which is referred to here as a cascade, may be repeated many times until the bubbles reach the surface. In more technical terms, the plume detrains all of the entrained water at the point where the downward buoyancy dominates upward momentum flux. This process of entraining and detraining water reduces the stratification of the water column. In the homogenous case, or the case of weak stratification and high airflow rate, detrainment only takes place at the surface. In the case of strong stratification and weak airflow rate, more than one detrainment takes place. McDougall (1978) examined bubble plume dynamics in a stratified medium via a series of experiments and showed 10.1071/MF02045 1323-1650/03/030271 272 Marine and Freshwater Research that mass, momentum and buoyancy conservation equations could be applied to model this process. Based on these equations, Schladow (1992) developed a bubble plume model that took into account the fact that there is potentially a terminal height to which any buoyant plume will rise. By reinitializing the plume model at the height of rise of each individual plume, he showed that it is possible to explicitly represent the cascade and to analyse it in detail. Consistent with previous experimental results (McDougall 1978; and Asaeda and Imberger 1988), Schladow (1992) demonstrated that more than one plume is formed for a weak airflow rate and strong stratification. Though Schladow’s (1992) model describes well the hydrodynamic behaviour of plumes, the model does not account for the oxygen and nitrogen transfer from the gaseous air bubbles to the ambient water. Also, the model does not include the change in slip velocity as the air bubble size changes in response to the ambient pressure decreasing as the bubbles rise. Schladow (1993) developed design charts to optimize the bubbler design parameters for linearly stratified reservoirs. To use these charts for all non-linear types of stratification, one must re-express the density stratification profiles in terms of an equivalent linear stratification (ELS) where the potential energies for both the actual stratification and ELS are same. Schladow’s (1993) model, consistent with the results of Asaeda and Imberger (1993), showed that the maximum mechanical efficiency occurs when the airflow rate is just sufficient to cause a single detrainment (outflow) at the surface. Wüest et al. (1992) demonstrated experimentally and modelled, assuming top-hat profiles, a diffuser unit consisting of 54 tubes. Of particular interest to Wüest et al. (1992) was the gaseous mass transfer to the ambient water. Though the model accounts for the change in slip velocity with bubble size and gas transfer, it does not account for more than one plume in cascade. The present study uses a modified version of Schladow’s (1992) model for three purposes. 䊉 䊉 䊉 To examine the sensitivity of the operating cost (i.e. mechanical efficiency), destratification time and the design airflow rate to uncertainty in the design input parameters (mainly airflow rate and ambient stratification). To develop simple relationships that can be used to apply Schladow’s (1993) equivalent linear stratification method to determine the optimum airflow rate. In doing so, we are mostly interested in the case where the airflow rate may be adjusted as the reservoir destratifies (i.e. some form of real time control). In addition, we examine the range of validity for the application of the ELS method. Whether it is necessary for modelling purposes to include changes in air bubble radius and slip velocity. G. B. Sahoo and D. Luketina Gas transfer to the ambient fluid is not discussed here because it is addressed in a separate paper (G. B. Sahoo and D. Luketina, unpublished data). Bubble-plume model A bubble plume model has been developed that combines the features of the Schladow (1992) and Wüest et al. (1992) models. This model is described in the remainder of this section. Features and assumptions Previous investigators (McDougall 1978; Schladow 1992; Wüest et al. 1992; Asaeda and Imberger 1993) have presented the basic equations for bubble plume models based on Gaussian or top-hat profiles for density and velocity within the plume and discussed the values that should be used for bubble plume parameters, such as the entrainment coefficient α and the spreading ratio λ, which represents the ratio of the effective buoyancy width to the effective momentum width within the plume. The features and principal assumptions made in developing this model in a stratified environment are as follows. (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) The variation of density is only important in the gravity (buoyancy) terms and not for mass fluxes (i.e. the Boussinesq assumption as used in most plume theories). The density of gas is negligible compared with that of water in the momentum equation. Ambient currents are negligible compared with the plume entrainment velocity. The plume is fully turbulent. The turbulent transport of momentum and scalar quantities (heat, salinity, gases) are negligible compared with advective transport. The bubble source is assumed to release uniformly sized bubbles at a constant rate. Bubble coalescence and divisions are negligible. In this model, the number of bubbles and the flux number (number of bubbles per unit time rising through a horizontal plane) are kept constant. The bubbles are of uniform size at each height. The properties of the initial plume water are those of lake water at the depth of the diffuser. Gas exchange between water and bubbles for gases other than oxygen and nitrogen (e.g. argon, carbon dioxide, methane and others) can be neglected. However, such gases can readily be included in the model. We consider a continuous point source bubbler located at a depth (h) below the surface of a density stratified water column. Let Q(z) be the steady flow rate of gas at any height (z) above the point source and Q0, the gas flow rate at atmospheric pressure. By assuming isothermal expansion of Bubble-plume behaviour and destratification Marine and Freshwater Research the gas, the volume flow rate of the gas can be expressed as a function of height: Q (z) = Q0 p a H ( − z ) ρr g ( w ( r,z ) = w c ( z ) exp − r 2 b2 ) θ ′ ( r,z) = ( g ρr ) ρ0 ( z) - ρc ( z) exp − r 2 ( λb) (2) 2 (3) where ρc(z) is the centreline density of the plume, ρ0(z) is the ambient density at height z, w(r,z) is the average vertical velocity at height (z) and radial distance r from the plume centreline, wc(z) is the vertical velocity at the centreline at height (z) and b is the effective radius of the plume. Conservation equations Following McDougall (1978) and Schladow (1992), the differential equation for continuity is: ( ) d πb2 w = 2παbw dz (πb2wρ0κT) can be reduced to the corresponding expression for the temperature flux (πb2wT): ( (4) where the continuity equation has been derived using the standard entrainment assumption ue = αw, where ue is the entrainment velocity, w is the centreline velocity (the subscripts ‘c’ being dropped), and α is the entrainment coefficient (for a Gaussian profile). The usual value of the entrainment coefficient for a buoyant plume is considered to be 0.083 (List 1982; Milgram 1983; Poon 1985; Asaeda and Imberger 1993; Schladow 1993). As explained by Morton (1959) and Wüest et al. (1992), the entrainment coefficient for a top-hat profile is 2 times the corresponding value used for a Gaussian profile α. Furthermore, the plume width of a top-hat profile is 2 times the plume width of a Gaussian profile. The heat flux equation is derived by assuming that the coefficient of specific heat per unit water volume (ρ0κ) is constant, and neglecting the heat content of the gas volume, so that the conservation equation for the heat flux ) d πb2 wT = 2παbwTa dz (1) where pa, the atmospheric pressure, is expressed in terms of an equivalent water depth as ha = pa/ρrg, where ρr is the equivalent reference density and g is gravitational acceleration. Thus, the static pressure at the point source is H = h + ha and the total pressure experienced by the gaseous bubbles at any height (z) is H – z. At sea level ha ~ ~ 10.2 m. For modelling convenience, it is assumed that the distributions of vertical velocity and density are Gaussian shaped at all heights (McDougall 1978; Schladow1992). This assumption of self-similarity has experimental support in unstratified surroundings (Kobus 1968). Accordingly, the equations for vertical velocity and density deficiency are: 273 (5) where Ta is the ambient water temperature given by measured temperature profiles and T is the plume water temperature. Following Schladow (1992), the momentum and buoyancy conservation equations are: d ( 12 πb2 w 2 ) = πλ 2b2θ′ dz (6) Q0Pa w d πλ 2b2 wθ′ = −πb2 wN 2 + d (7) 2 dz λ +1 dz ( H − z ) ρr ( w + u b ) Here, ub = ws(λ2+1), where ws is the slip velocity of air bubbles relative to the liquid in the plume and the buoyancy frequency (N) is defined as N = [–(g/ρr)dρ0/dz]1/2. The bubble slip velocity ws is a function of air bubble radius and can be calculated using the relationships developed by Wüest et al. (1992) (see Table 1). Poon (1985) conducted a series of experiments and suggested that, with the possible exception of very large bubble size, a constant value of λ = 0.3 is appropriate for the spreading rate. McDougall (1978) and Schladow (1993) reported similar assumptions. Wüest et al. (1992) used 0.8 as the spreading rate for their top-hat-profile based model, which corresponds to a spreading rate of 0.56 for a Gaussian profile. A value of λ = 0.3 was used in this study and, in any case, the results are not sensitive to the value of λ. Neglecting the stratification close to the source, Equation 7 can be simplified to the form (Schladow 1992): θ′0 = ( λ 2 +1) w + u b b2 Q0 p a λ 2πρr ( H − z ) ( ) (8) where, and θ´0 = gθ0, and θ0 is the density deficit between the plume and the ambient water at the source. Based on the assumption that the stratification can be neglected close to the source, McDougall (1978) has presented the power series solutions for the initial plume Table 1. Parameter approximations for the bubble slip velocity ws (m s–1) from Wüest et al. (1992) where R is the bubble radius (m) Approximations Criteria 1.357 ws (R) = 4474(R) ws (R) = 0.23 ws (R) = 4.202(R)0.547 R < 7.0 × 10–4 7.0 × 10–4 < R < 5.1 × 10–3 R > 5.1 × 10–3 274 Marine and Freshwater Research G. B. Sahoo and D. Luketina radius (b0) and the centreline velocity (w0) of a single bubble plume: 1 z 3 MH b0 = 2αz 0.6 + 0.01719 −0.002527 G ≈ 0.776 − ∂ρ ∂z 2 3 z MH 1 3 z 3 MH z 3 MH + z ( 0.4536 − 0.0105 M −1 ) +... H (10) where M is a non-dimensional group that refers to the source strength and is defined as (Schladow 1992): ) ( 4πα 2ρr H 2u 3b V0 = πb20 w0, M0 = V0w0 and Φ0 = V0π0 (11) The density (ρ) (kg m–3) of the reservoir water is approximated as follows (UNESCO 1981): ρ = 0.0001Τ3 –0.009095T2 + 0.0679T + 999.84 (12) where T is the temperature in degrees centigrade. Schladow (1992) defined a non-dimensional group, C, which refers to stratification strength. However, the use of C and M as the non-dimensional variables is somewhat inconvenient because both contain the source strength (airflow rate). For this reason, a new non-dimensional group G, which is independent of airflow rate, is defined here and we use G and M as the non-dimensional variables to describe the plume behaviour: N 3H 3 (1+ λ2 ) pa 4πα2gh a u3bρr 32 H5 Q0 (14) Here, for a specific reservoir, the depth (h), and thus the total head (H) is constant and the non-dimensional stratification G depends only on the density gradient. The important aspect of these two non-dimensional groups (source strength and stratification strength) is that the plume variables, centreline velocity, plume radius and the density difference are identical for any two plumes in a linearly stratified ambient fluid that have the same M and G values. Differential Equations 4, 5, 6 and 7 were integrated on a one-dimensional equi-spaced grid using a fourth order Runge–Kutta scheme. The integrations were continued until either the water surface was reached or the upward fluid flux became zero. At this point, the water entrained by the plume was detrained and the distance between the commencement and detrainment point of the plume was considered as the height of the rise of the plume. This water was then inserted into the reservoir layer with the same density. If the detrainment point was below the free surface, then a new plume commences with the initial conditions being those at the height of rise of plume. This process of plume formation may be repeated many times until the surface is reached. The plume density (ρn) at the height of rise of each plume was found by integrating the entrained mass and volume: hP ρn, P = h P-1 ∫ 2πb(z)αw(z)ρ(z)dz hP h P-1 ∫ 2πb(z)αw(z)dz hP = ∫ bwρ dz h P-1 hP h P-1 (15) ∫ bw dz where hp is the height of rise of the Pth plume and h0 is the diffuser depth. Model results ( Set-up and initial conditions ) 3 3 2 3 4 N H 1+ λ pa 1 C = N H H = 2 3 gQ0 h a 4πα gh a u bρr M or C = G M Numerical scheme Q0pa λ 2 +1 Equations 8, 9 and 10 can be evaluated close to the source to provide initial values b0 and w0. Thus the initial values of volume (V0), momentum (M0) and buoyancy (Φ0) flux are: G = H3 , 1 1.609 − 0.3195 M= 32 C ≈ 9.71×10−6 − ∂ρ ∂z Q and M ≈ 79958.8 02 H (9) 2 +0.06693 + z ( −0.04609 + 0.000031 M −1 ) +... H w 0 = u b MH z Using the values λ = 0.3, α = 0.083 and the initial air bubble radius (R) as 1 mm (this assumption is explained later), the non-dimensional groups defined above can be simplified to: (13) For the numerical computations, a grid spacing of 5 cm was used. For most scenarios, and unless specified otherwise, the reservoir was considered to be 100 m deep giving 2000 equi-spaced grid points or layers. The bubbler was positioned at the bottom of the reservoir and the Bubble-plume behaviour and destratification Marine and Freshwater Research hydrodynamic behaviour of the plume was studied for various flow rate and stratification conditions. The temperature of the ambient water was set to vary linearly from 10°C at the bottom to 25°C at the surface. Based on the bubble-rise velocity experimental data of Haberman and Morton (1954) and the mass-transfer experimental data of Motarjemi and Jameson (1978), Wüest et al. (1992) developed the relationships for the slip velocity and the gas transfer coefficient for molecular oxygen and nitrogen as a function of air-bubble size. They reported that the gas-transfer coefficient for molecular oxygen and nitrogen remains constant for bubble size greater than 0.67 mm and reduces steeply as bubble size reduces. It is also clear from Table 1 that smaller bubble size produces lower slip velocity and thus higher residence time within water, which will result in higher gas-transfer rates. For these reasons, and consistent with the recommendation of Wüest et al. (1992) for efficient gas-transfer rate, the initial bubble radius was set to 1 mm. Mechanical efficiency and destratification time The McDougall (1978) and Schladow (1992) studies describe in detail the hydrodynamic behaviour of a bubble plume for a linearly stratified case. This study examines some of the practical aspects of optimum bubbler design for different stratification scenarios. Of key importance are the mechanical efficiency and destratification time, which involve estimating the change in potential energy of water column owing to bubbler operation. Assuming isothermal compression, the instantaneous mechanical efficiency (ηmech) can be estimated as: = ( PEf −PEi ) ∆PE ∆PE/∆t = = Wiso Wiso Wiso /∆t ∆t→0 ∂PE ∂t ∂Wiso ∂t ∂PE = NP ∂PE P ∑ ∂t ∂t P=1 NP i=LP ρ − ρ i−1 i+1 P=1 i=L P−1 ∂Wiso p = 2.303pa QT log h ∂t pa 2 i zi − ∑ q j j=LP−1 (17) where zi is the height of the centre of the ith ambient layer above the neutral-buoyancy layer of the Pth plume, ρi is the density of the ith ambient layer, qj is the entrainment (m3 s–1) from the jth layer of the reservoir, LP is the layer at the height of rise of the Pth plume, L0 is the layer containing the diffuser (18) where pa and ph are the absolute pressure at the surface and at the bubble-plume source (atmospheric pressure plus water pressure), respectively, and QT is the total free airflow rate required. If Ns is the number of buoyancy sources required, then QT = NsQ0. From Equations 16, 17 and 18, it is clear that the instantaneous mechanical efficiency is independent of bubbler-operation time and the surface area of the stratified reservoir. However, it does depend on the airflow rate and stratification strength. The mechanical efficiency predicted by the model for M values of 10, 1, 0.1 and 0.01 is plotted as a function of C (Fig. 1) for comparison with Schladow’s (1992) result. As the water depth and airflow rate were kept constant along each of the M curves, the variation of C or G along any M curve is purely a function of changing the density stratification. All the curves of Fig. 1 are effectively the same as Schladow’s (1992) result and, as explained by Schladow (1992), are dominated by pronounced oscillatory behaviour, where the mechanical efficiency ranges from 1% to 15% with the highest M values producing the highest mechanical efficiencies. The mechanical efficiency predicted by the model for M values of 5, 1, 0.1 and 0.01 is plotted as a function of G (Fig. 2), the new non-dimensional group used (16) where PEi is the initial potential energy of the water column, PEf is the final potential energy of the water column after bubbler operation for time (∆t), and ∂PE/∂t is the rate of change of potential energy and can be estimated for a reservoir of any shape using (see Appendix 1 for the derivation): ≈ ∑ g ∑ and NP is the total number of plumes formed in cascade within the water column of depth (h). The choice of the neutral-buoyancy layer as the datum in Equation 17 is quite important because it minimizes the numerical error in determining ∂PE/∂t. This is explained further in Appendix 1. The isothermal work of compression (Wiso) is defined (Rogers and Mayhew 1974) as: 15 Mechanical efficiency η mech (%) ηmech = 275 12 9 6 3 0 1.E+01 1.E+02 1.E+03 1.E+04 1.E+05 1.E+06 C Fig. 1. Mechanical efficiency ηmech (%) as a function of C for M equal to10 (thick black line), 1 (medium black line), 0.1 (thin black line) and 0.01 (thick grey line) for a linearly stratified reservoir. 276 Marine and Freshwater Research G. B. Sahoo and D. Luketina 15 2 12 4 3 7 6 5 5 1 20 4 3 9 Depth (m) Mechanical efficiency η mech (%) 0 6 40 2 60 1 3 80 0 1.E-01 1.E+00 1.E+01 1.E+02 1.E+03 1.E+04 1.E+05 1.E+06 G Fig. 2. Mechanical efficiency ηmech (%) as a function of G for M equal to 5 (thick black line), 1 (medium black line), 0.1 (thin black line) and 0.01 (thick grey line) for a linearly stratified reservoir. G values greater than 6300 (thick black dotted line) are not realizable in practice and are only shown so that they can be compared with Fig. 1. The mechanical efficiency peaks are numbered for the case M equal to 1. 5 0 4 3 20 Depth (m) 2 40 1 60 80 100 1.E+00 1.E+01 1.E+02 1.E+03 1.E+04 1.E+05 1.E+06 G Fig. 3. Maximum height of rise of plumes in a plume cascade in a linearly stratified water column as a function of G for M equal to 1. The number assigned to each line corresponds to the detrainment points, with 1 being the detrainment point closest to the diffuser. G values greater than 6300 (thick black dotted line) are not realizable in practice. for this study. Fig. 2 shows similar oscillatory behaviour, but the curves are less scattered than in Fig. 1. Asaeda and Imberger (1993) demonstrated via experiments that bubbler operation would achieve maximum efficiency when the supplied energy is just sufficient to lift the heavy bottom water up to the water surface. The oscillatory behaviour of all the curves in Figs 1 and 2 reflects 100 0.01 0.1 1 10 M Fig. 4. Maximum height of rise of plumes in a linearly stratified water column as a function of M for G equal to 3414. The number assigned to each line corresponds to the detrainment points of that numbered plume. this important aspect. The heights of rise of plumes (i.e. the detrainment points) are plotted as functions of G for M equal to 1 in Fig. 3. The first mechanical efficiency peak (i.e. the leftmost peak on any curve) of Fig. 2 corresponds to one detrainment just forming at the surface, whereas the second peak corresponds to one internal detrainment and a final detrainment just forming at the surface (see Fig. 3). Therefore, the peak number is linked to the number of detrainment points. At other points the plume still has positive momentum, which has not been fully utilized for mixing. Fig. 4 is similar to Fig. 3 except that the detrainment depths are plotted as a function of M for a fixed linear stratification case of G equal to 3414 (this corresponds to a bed and water-surface temperature of 10°C and 26.5°C, respectively, in a 100-m deep reservoir). For sufficiently large M values there is one detrainment – at the surface. As the M value reduces, the number of detrainment points increases. For the lowest M value examined here (0.01), six internal detrainments and one final detrainment at the surface are observed. Before proceeding, it is instructive to determine the practical range of G values that can occur in reservoirs. In turn, these G values mostly depend on the thermal stratification. Table 2 shows the most different surface and bed temperatures recorded during a number of reservoir and lake studies. These data show that the thermal stratification does not tend to exceed 5°C as a top-to-bottom temperature difference for any type of tropical reservoir or lake, and 15°C and 25°C for any semi-tropical and temperate reservoirs (or lakes) respectively. The associated G values were determined by assuming that the temperature profile varied linearly from Bubble-plume behaviour and destratification Table 2. Marine and Freshwater Research 277 Bed and surface temperatures recorded in a number of reservoirs and lakes and associated G values Depth (m) Lake/Reservoir Class Valencia Lake, Venezuela Upper Peirce Reservoir, Singapore Babagaon Reservoir, Malaysia Glennies Creek Reservoir, Australia Teddington Storage, Australia McCarrons Lake, USA Calhoun Lake, USA Martin Lake, Indiana, USA DeGray Lake, Arkansas, USA Tropical Tropical Tropical Semi-tropical Semi-tropical Temperate Temperate Temperate Temperate 35.0 22.0 57.0 55.2 08.6 14.0 24.0 16.5 48.0 the bed to the water surface and that R, α and λ are equal to 1 mm, 0.083 and 0.3 respectively. The maximum G value for the data in Table 2 is around 3000. Table 3 shows the G values associated with various temperature gradients. For a deep reservoir (the deeper the reservoir, the larger the G value), for example 100 m, having a bed-to-surface temperature difference of 25°C gives an upper limit G value of around 6300. G values of 1000 and 4100 are not likely to be exceeded in tropical and semi-tropical reservoirs respectively. The first peak for M values of 10, 7.5, 5, 2.5 and 1 occurs at G values of 18446, 13300, 8424, 3735, and 1257, respectively, in a 100-m deep reservoir. Since the maximum realizable G value is around 6300, the value of M in practice is always less than 5 if the bubbler is to be operated at optimal or near-optimal efficiency. Of major importance when operating a bubbler is the time T required to achieve a fully or near-fully mixed state. Rather than using a time, Schladow (1992) used a mixing effectiveness (Emix) expressed as the ratio of the change of potential energy to the maximum change in potential energy (i.e. that required to attain a fully mixed state) over a specific time interval (set arbitrarily as one day). It is more useful to express the destratification rate as a time per unit surface area per buoyancy source (Γ) so that the results can be Temperature (°C) Bed Surface ∆T (°C) G 27.0 27.2 24.0 11.1 17.0 00.0 07.0 03.6 06.0 01.2 03.8 05.0 14.9 12.0 22.0 19.0 22.4 24.0 0045 0173 0554 1950 0686 0519 1151 0996 3040 28.2 31.0 29.0 26.0 29.0 22.0 26.0 26.0 30.0 Source Lewis (1983) Yang et al. (1993) Lamy-Contaret (2000) Schladow (1993) Burns (1998) Ford and Stefan (1980) Ford and Stefan (1980) Wetzel (1982) Martin and McCutcheon (1999) readily applied to reservoirs with different surface areas (As) – this is done as follows: Γ= T ∆PE mixed / As = As ∂PE/∂t (19) where the denominator is found using Equation 17 and the numerator, the change in maximum potential energy per unit surface area (∆PEmixed/As), is found using: i=L h ∆PEmixed As ≈ gh−ϕ ∑ ( ρm − ρi ) ziϕ+1∆z i=L0 where γ and ϕ are constants for a reservoir with cross-sectional area , A = γzϕ, Lh is the surface layer of the reservoir, ∆z is the layer thickness and ρm is the homogenous density of a fully mixed reservoir (see Appendix 1 for the derivation). From Equation 19 and associated equations, it is clear that mixing time per unit surface area of the water column depends on the stratification profile, the airflow rate, the reservoir shape (ϕ) and the number of bubblers per unit surface area. Unless mentioned, the constant ϕ for the reservoir shape is equal to 0 for the results that follow. It is important to note that the mixing time per unit surface area (Γ) estimated using Equation 19 is a lower bound on the mixing time. This is because as mixing Table 3. G values as a function of reservoir depth h and density gradient (∆ρ h–1) for R = 1 mm, α = 0.083 and λ = 0.3, assuming a linear density gradient where ∆ρ is the density difference between the bottom and top layer; corresponding temperature differences are also shown ∆T (°C) ∆ρ (kg m–3) 10 20 30 40 02.5 05.0 07.5 10.5 14.0 18.0 25.0 0.50 1.00 1.50 2.00 2.50 3.00 3.35 0071 0202 0371 0571 0797 1047 1235 0084 0239 0438 0674 0942 1237 1459 0108 0307 0563 0866 1209 1588 1873 0137 0388 0712 1095 1529 2008 2369 (20) Reservoir depth h (m) 50 60 0169 0478 0878 1351 1887 2478 2923 0204 0577 1059 1630 2276 2990 3526 70 80 90 100 0242 0683 1254 1929 2693 3538 4172 0281 0795 1460 2246 3136 4119 4858 0323 0913 1677 2580 3603 4732 5581 0367 1038 1905 2930 4092 5375 6339 278 Marine and Freshwater Research G. B. Sahoo and D. Luketina Destratification time Γ (s m–2) 1.E+03 1.E+02 5 4 3 1.E+01 2 1 1.E+00 1.E-01 1.E+00 1.E+01 1.E+02 1.E+03 1.E+04 1.E+05 1.E+06 G Fig. 5. Mixing time per unit surface area Γ (s m–2) as a function of G for M equal to 5 (thick black line), 1 (medium black line), 0.1 (thin black line) and 0.01 (thick grey line) for a linearly stratified reservoir. G values greater than 6300 (thick black dotted line) are not realizable in practice. The peaks are numbered for the case M equal to 1. Destratification time Γ (s m–2) 1.E+03 1.E+02 of G. The important features of the staircase-like shape depend on the number and location of the detrainment points. Starting from the left side of a curve, the mixing time per unit surface area remains nearly constant up to the first peak. It then increases in a series of local peaks and troughs. The trade-off between mechanical efficiency and mixing time is demonstrated in Fig. 6. Since the mixing time per unit surface area increases sharply as the peak number increases without much change in the mechanical efficiency, it is recommended that bubblers be designed to coincide with the first peak (i.e. the medium grey line in Fig. 6). However, lower airflow rates, and thus a smaller compressor, are required to operate at the second peak compared with the first peak. There are also other reasons why it may be advantageous to design for the second peak. These reasons are discussed in the next section. Optimum operational conditions for linearly stratified cases Relationships are presented in this section for determining the mechanical efficiency ηmech, the airflow rate (via M) and the partially normalized destratification time Γ associated with optimal bubbler operation (i.e. the first peak). We also consider the second peak because Schladow (1993) makes use of this. Analysis of the first and second peak points shows that the relationship between mechanical efficiency and G for different reservoir depths (h) is well fitted (correlation coefficient exceeding 0.99) by: 4 4 i=0 i=0 ηmech = ∑ a i h i lnG + ∑ bi h i 1.E+01 1.E+00 1.E+00 1.E+01 1.E+02 (21) where h is the depth of reservoir and the coefficients ai and bi are presented in Table 4. Fig. 7 shows the fitted equations. Similarly, M and the mixing time per unit surface area (Γ) associated with the first peak for different reservoir depths (h) are well fitted (correlation coefficients exceeding 0.99) respectively by: Mechanical efficiency η mech (%) Fig. 6. Mixing time per unit surface area Γ (s m–2) as a function of mechanical efficiency ηmech (%) for M equal to 5 (thick black line), 1 (medium black line), 0.1 (thin black line) and 0.01 (thick grey line) for a linearly stratified reservoir. Only cases corresponding to G £ 6300 are shown. The medium grey line passes through the first mechanical efficiency ηmech (%) peak for each M case. proceeds and the stratification weakens, the rate of change of potential energy ∂PRE/∂t reduces (similarly the mechanical efficiency ηmech will reduce). Fig. 5 shows the mixing time per unit surface area (s m–2) as a function of G for M equal to 5, 1, 0.1 and 0.01 for a linearly stratified reservoir. The curves take the form of rising staircases, with the highest M values being associated with the minimum destratification times for any given values B hi i M = ∑ ( Ai h i ) G 4 (22) i=0 ( ϕ +1) 4 C hi G −0.3 Γ = 12 1 − ∑ Ns ϕ + 3 ( ϕ + 2 )2 i=0 ( i ) (23) where Ns is the number of buoyancy sources and the values of the coefficients Ai, Bi and Ci are presented in Table 4. When determining Equation 23, the effect of ϕ on the mixing time per unit surface area (i.e. the term in the square brackets) was derived theoretically (see Appendix 1). Knowledge of the reservoir stratification via G and the reservoir depth (h) allow the optimum mechanical efficiency to be computed using Equation 21, whereas the source Bubble-plume behaviour and destratification Table 4. M (Equation 22) Ai Bi –1.170 0.149 –3.539 × 10–3 3.624 × 10–5 –1.347 × 10–7 –6.517 × 10–4 2.178 × 10–4 –4.381 × 10–6 4.048 × 10–8 –1.401 × 10–10 0.819 –1.414 × 10–3 2.663 × 10–5 –2.360 × 10–7 0.768 × 10–9 451.924 –27.335 0.667 –7.060 × 10–3 2.690 × 10–5 1.063 0.750 × 10–2 –1.272 × 10–4 1.549 × 10–6 –7.421 × 10–9 –3.124 0.145 –3.364 × 10–3 3.285 × 10–5 –1.160 × 10–7 –0.813 × 10–4 0.221 × 10–4 –0.412 × 10–6 0.350 × 10–8 –0.110 × 10–10 0.840 –1.156 × 10–3 2.514 × 10–5 –2.575 × 10–7 0.970 × 10–9 5774.925 –357.388 8.751 –92.517 × 10–3 35.207 × 10–5 1.E+02 12 10 8 1.E+01 6 4 Destratification time Γ (s m–2) Mechanical efficiency η mech (%) 14 2 0 1.E+00 1.E+01 Γ (Equation 23) Ci 1.091 1.294 × 10–2 –2.391 × 10–4 2.097 × 10–6 –7.232 × 10–9 16 1.E+02 G 1.E+03 279 Values of coefficients in Equations 21, 22 and 23 ηmech (Equation 21) ai bi i First Peak 0 1 2 3 4 Second Peak 0 1 2 3 4 Marine and Freshwater Research 1.E+00 1.E+04 Fig. 7. First peak mechanical efficiency ηmech (%) (lines rising from left to right) and corresponding destratification time per unit surface area Γ (s m–2) (lines falling from left to right) as a function of G (thick black line fitted to solids squares), G – 10%G (medium black line fitted to asterisks) and G + 10%G (thin black line fitted to solid circles) for a reservoir of 50 m depth (h). strength (i.e. the airflow rate) and the mixing time Γ can be estimated using Equations 22 and 23 respectively. The preceding design equations rely on knowledge of G – however, a suitable design value of G can be difficult to determine owing to natural variability. Schladow (1993) stated that ‘the two dimensionless parameters that describe bubble plumes, M and C, contain three variables – water depth, airflow rate and the strength of the stratification. For a given water depth and initial strength of the stratification, the selection of a suitable airflow rate (Q0) that will yield a desirable position on the M–C curve is difficult. Based on many computer simulations; the most efficient design is that one that has its initial value of C between the first and second peaks of the M–C curve, but very close to the second peak. As destratification proceeds, the efficiency approaches towards the first peak. Equations 21–23 can be used to conveniently obtain the second peak values for ηmech, M and Γ. Here, however, we are mostly concerned with the case where the airflow rate may be adjusted as the reservoir destratifies (i.e. some form of real-time control). In this case, the first peak is the best choice and Equations 21–23 with first peak coefficients should be used. However, the issues of measurement accuracy (of the stratification), evolution of the stratification prior to the airflow rate being updated and the accuracy of the model prediction need to be considered. This can be examined by looking at Fig. 7, which shows the trend lines of peak mechanical efficiency ηmech (%) and destratification time per unit surface area Γ (s m–2) as function of G for a 50-m deep reservoir. Also shown are the mechanical efficiency and destratification time that would result from the design G being 10% less than actual (G – 0.1G in Fig. 7) and vice-versa. For the case of the design G being 10% less than the actual G, the mechanical efficiencies do not vary much from the peak mechanical efficiencies. However when the design G is 10% greater than the actual G, the mechanical efficiency at which the bubbler operates will decrease substantially, particularly at high G values. This is because the mechanical efficiency drops steeply after the peaks, whereas values before the peak rise at a lesser rate. The trend lines of destratification time per unit surface area also show a similar sensitivity. This infers that the designer should be careful about overestimating the design G. A conservative practice would be to reduce the design value of G by 10% if attempting to operate at the first peak. All of the bubble plume operational design criteria discussed so far are intended for the linear stratification case. However, the thermal stratification in a reservoir does not often follow a linear pattern. Schladow (1993) reported that non-linear step stratifications could be treated as linear stratifications by finding the linear stratification that has the same potential energy relative to the base of the water body. The following section examines in more detail the use of equivalent linear-stratification algorithms for various step stratifications. Marine and Freshwater Research G. B. Sahoo and D. Luketina 0 (a) Depth (m) 20 0 a2, b2, c2 d3, e3, f3 20 (b) e2 b1 40 a1 60 c1 Depth (m) 280 40 d1 f1 e1 80 (b) 100 0.01 0.1 1 10 M 0 (c) 100 0.01 0 g3 20 Depth (m) Depth (m) (d) 40 g2 60 80 100 0.01 0.1 g1 (d) 40 1 M 10 10 1 10 h3 h2 60 80 0.1 1 M 20 (c) f2 60 80 (a) d2 100 0.01 h1 0.1 M Fig. 9. Height of rise of individual plumes in a plume cascade as function of M for (a) single-step stratification cases a–c, (b) double-step stratification cases d–f, (c) double-step stratification case g and (d) double-step stratification case (h). Subscripts 1, 2 and 3 refer to the first, second and third detrainment points respectively. (e) (g) (f) (h) Fig. 8. Eight step-stratification cases (a–h) and equivalent linear stratifications. Optimum operational conditions for step-stratification cases Eight different step stratifications of equal potential energy and identical bottom density, along with their equivalent linear stratification (the equivalent linear stratification is the same for all cases), were examined (see Fig. 8). The height of rise of plumes (i.e. detrainment locations) for each step case and the equivalent linear stratification case are plotted in Figs 9 and 3 respectively. At sufficiently large M values there is one detrainment, which occurs at the surface, for all cases. For the lowest M value (0.01) examined here for the step-stratification cases, the number of detrainment points found in a step-stratified profile corresponds to the number of steps of the stratified profile and a final detrainment at the surface. It is concluded from this behaviour, as expected, that the step stratification approaches the characteristics of the linear case as the number of steps increases. The mechanical efficiency for both cases were examined for different source strength M = 10 to 0.01 as shown in Fig. 10. For the cases of single-step stratification (Figs 8a–c), the potential energy change owing to mixing can only occur at the step, whereas the second plume, which detrains at the surface, does not contribute to mixing. This results in very low mechanical efficiency as shown in Fig. 10a. The double-step stratification cases have considerably higher efficiencies. In particular, cases e and h have efficiencies close to that for the linear stratification (Fig. 10b). Zic et al. (1992) conducted a series of experiments similar to the typical lake thermal stratification and reported that the energy efficiencies for typical lake destratification set-ups are much lower (<3%) in temperature (weakly) stratified water, whereas the energy efficiencies are higher by up to 12% for the case of linearly stratified saline (strong) stratification set-ups of Asaeda and Imberger (1988). In this study too, mechanical efficiency efficiencies are found to be very low (<1%) in the case of typical single-step stratification, wheres it is higher for the linear stratification case by up to 13%. The first peak mechanical efficiency ηmech (rightmost in Fig. 10a) corresponds to the case of a plume in a linear stratification having a single detrainment or outflow. The subsequent peaks (i.e. 2 to 5) correspond to plumes having progressively more outflows as M is reduced. Quite clearly, the highest mechanical efficiency for step cases corresponds Marine and Freshwater Research 14 1 (a) 12 2 10 3 4 8 5 6 4 Step cases a to c 2 0 0.01 0.1 1 10 Mechanical efficiency η mech (%) M 14 12 1 (b) 2 10 8 3 5 h e 4 6 g 4 d 2 0 0.01 0.1 1 f 10 M Fig. 10. Mechanical efficiency ηmech (%) as function of M for (a) single-step stratification cases of a (thick black line), b (medium black line), c (thin black line) and equivalent linear stratification (thick grey line) and (b) double-step stratification cases of d (thin grey line), e (medium grey line), f (thin black line), g (medium black line), h (thick black line) and equivalent linear stratification case (thick grey line). The mechanical efficiency peaks of the linear stratification case are numbered. to the first peak. Applying the design method of Schladow (1993) to the second peak (i.e. two detrainment points) would result in very low efficiencies. Rather, it is recommended to use a simple bubbler model to find the optimum bubbler operational conditions for step stratification. Using the design charts for the equivalent linear method as proposed by Schladow (1993) for all step-stratification cases may lead to sub-optimal design. Effect of bubble size on bubbler design The final objective to be examined here is the necessity of inclusion of variable air-bubble radius and corresponding slip velocity for modelling purposes. In practice, the diameter of air bubbles have been reported in the range 1.5–3.7 mm (Goossens 1979), 2–5 mm (Zic et al. 1992) and about 2 mm and 4 mm for ceramic and nozzle bubblers respectively (Asaeda and Imberger 1993). Zic (1990) reported that as the mean observed diameter of the bubbles in an air-bubble plume is about 2 mm, a commonly chosen value for slip velocity is 0.3 m s–1 (also see Kobus 1968; McDougall 1978; Goossens 1979; Milgram 1983). However, Wüest et al. (1992) reported – ‘since the gas exchange rate (fractional volume changes per unit time) 281 depends on the surface-to-volume ratio of the bubbles, the oxygen dissolves faster in the lake if the bubbles are small. In addition, smaller bubbles have lower slip velocity and thus longer contact time with the water before reaching the depth of maximum plume rise.’ Based on this, Wüest et al. (1992) recommended 0.8 mm ≤ R ≤ 1 mm as the best choice for the case of efficient oxygenation and artificial mixing of the Baldeggersee Lake during summer using oxygen as the source. The same logic applies if air is used as the source instead of oxygen (i.e. a bubble size between 0.8 and 1 mm is appropriate). The mechanical efficiency ηmech (%) and destratification time per unit area Γ (s m–2) for M equal to 1 and R values equal to 1 mm, 1.5 mm, 3 mm and 6 mm are presented in Figs 11 and 12 as a function of G. The peak mechanical efficiency ηmech is found to be relatively insensitive to the changes in bubble radii considered here as the destratification time per unit area Γ (s m–2). Demonstrating that changes in the air-bubble radius and slip velocity can be neglected when modelling ηmech and Γ. However, the oxygen-dissolution efficiency is somewhat more sensitive and reduces as the bubble radius R increases (Sahoo and Luketina 2003). Since the gas-transfer coefficient for oxygen and nitrogen is independent of bubble size greater than 0.67 mm (Wüest et al. 1992), and it is difficult in practice to maintain exact initial bubble size through out the operation, an average bubble radius of around 1 mm should be considered for design purposes. 12 10 Mechanical efficiency ηmech (%) Mechanical efficiency η mech (%) Bubble-plume behaviour and destratification 8 6 4 2 0 1.E+00 1.E+01 1.E+02 G 1.E+03 1.E+04 Fig. 11. Mechanical efficiency ηmech (%) as a function of G for bubbler radii R equal to 1 mm, 1.5 mm, 3 mm (thick black line since these cases have identical results) and 6 mm (medium grey line) for a linearly stratified reservoir for M equal to 1. G values greater than 6300 (thick black dotted line) are not realizable in practice. 282 Marine and Freshwater Research G. B. Sahoo and D. Luketina Destratification time Γ (s m–2) 1.E+02 1.E+01 1.E+00 1.E+00 1.E+01 1.E+02 G 1.E+03 1.E+04 Fig. 12. Mixing time per unit surface area Γ (s m–2) as a function of G for bubbler radii R equal to 1 mm, 1.5 mm, 3 mm (thick black line since these cases have identical results) and 6 mm (medium grey line) for a linearly stratified reservoir for M equal to 1. G values greater than 6300 (thick black dotted line) are not realizable in practice. Conclusions The two dimensionless parameters, M, the source strength, and C, the stratification strength, are known to govern bubble-plume behaviour. However, the use of C and M as the non-dimensional variables is somewhat inconvenient as both contain the airflow rate. Here, a new dimensionless group for the stratification strength known as G is defined. G is independent of the airflow rate and this means that the range of practicable G values in lakes and reservoirs can be determined. For example, G values of 1000 and 4100 are not likely to be exceeded in tropical and semi-tropical reservoirs, respectively, and any thermally stratified reservoir or lake less than 100-m deep is not likely to have a G value in excess of 6300. The primary objective of bubbler design is to find the optimum design conditions. Two indicators of bubbler performance, the mechanical efficiency ηmech (%) and the mixing time per unit area Γ (s m–2) were analysed as functions of M and G by using a one-dimensional bubble-plume model. The numerical error in the model when estimating the rate of change of potential energy ∂PE/∂T is considerably reduced if the neutral-buoyancy layer is selected as the datum. General equations (Equations 21 and 23) to estimate optimum bubbler design conditions i.e. airflow rate Qo (via M) and corresponding mechanical efficiency ηmech and destratification time per unit area Γ (s m–2) for a known linear or an equivalent linear stratification G in a reservoir of any shape have been derived. In cases where the airflow rate may be adjusted (i.e. some form of real time control) as the reservoir destratifies, it is recommended that the bubbler be designed to operate at the first peak mechanical efficiency ηmech (%). While the use of G simplifies the design process, a suitable design value of G can be difficult to determine owing to natural variability. Examining the sensitivity of ηmech and Γ (s m–2) to changes in G, it is found that the mechanical efficiencies are lower and destratification times are longer if the design G is higher than the actual G. Since it can be difficult to accurately determine the actual G, a conservative practice would be to reduce the design values of G by nearly 10% if attempting to operate at the first (or second) peak. The mechanical efficiency is found to be substantially less for a single-step stratification case than its equivalent linear stratification. This is because the potential energy change due to mixing can occur at the step (i.e. the interface between the upper and lower layers). A double-step stratification will have higher mechanical efficiencies that can, in some cases, approach the efficiency of its equivalent linear stratification. Therefore, it is inferred that use of the equivalent linear method with design charts as proposed by Schladow (1993) is valid only for linear or approximately linear stratification cases and may lead to sub-optimal design if applied to step-stratification cases. In a step-stratification case, a simple bubble-plume model is more useful in finding the optimum design criteria. The mechanical efficiency ηmech (%) and destratification time per unit surface area Γ (s m–2) are analysed as a function G for different bubble radii and it is found that ηmech (%) and Γ (s m–2) are relatively insensitive to the bubble radii. However, in order to maintain a suitable oxygen dissolution efficiency, a bubble size of 1 mm is recommended. Acknowledgments This work was carried out under the Asian Institute of Technology–ONDEO Services collaborative agreement. A PhD scholarship awarded to the first author by the French Ministry of Foreign Affairs is gratefully acknowledged. References Asaeda, T., and Imberger, J. (1988). Structures of bubble plumes in linearly stratified environments. Environmental Dynamics Report ED-88-250. (Centre for Water Research, University of Western Australia: Nedlands.) Asaeda, T., and Imberger, J. (1993). Structure of bubble plumes in linearly stratified environments. Journal of Fluid Mechanics 249, 35–57. Burns, F. L. (1998). Case study: automatic reservoir aeration to control manganese in raw water Maryborough town water supply Queensland, Australia, Water Science Technology 37, 301–8. Ford, D. E., and Stefan, H. G. (1980). Thermal predictions using integral energy model. Journal of the Hydraulic Division, Proceedings of the ASCE 106, 39–55. Goossens, L. (1979). ‘Reservoir Destratification with Bubble Columns.’ (Delft University Press: Delft, The Netherlands.) Bubble-plume behaviour and destratification Haberman, W. L., and Morton, R. K. (1954). An experimental study of bubbles moving in liquids. Proceedings of the American Society of Civil Engineers 80, 379–427. Kobus, H. E. (1968). Analysis of flow induced by air bubble systems. In ‘Proceedings of Coastal Engineering Conference’, Vol. II, Chapter 65, pp. 1016–31. (American Society of Civil Engineers: London.) Lamy-Contaret, N. (2000). ‘Limnology of Tropical Reservoirs.’ MSc Thesis. (Asian Institute of Technology: Thailand.) Lewis, W. M., Jr. (1983). Temperature, heat, and mixing in Lake Valencia, Venezuela. Limnology Oceanography 28, 273–86. List, J. (1982). Turbulent jets and plumes. Annual Review of Fluid Mechanics 189, 189–212, Martin, J. L., and McCutcheon, S. C. (1999). ‘Hydrodynamics and Transport for Water Quality Modeling.’ (Lewis Publishers: Boca Raton, USA.) McDougall, T. J. (1978). Bubble plumes in stratified environments. Journal of Fluid Mechanics 85, 655–72. McGinnis, D. F., and Little, J. C. (1998). Bubble dynamics and oxygen transfer in a speece cone, Water Science Technology 37, 285–92, Milgram, J. H. (1983). Mean flow in round bubble plumes. Journal of Fluid Mechanics 133, 345–76. Morton, B. R. (1959). Forced plumes. Journal of Fluid Mechanics 5, 151–63. Motarjemi, M., and Jameson, G. J. (1978). Mass transfer from very small bubbles – the optimum bubble size for aeration. Chemical Engineering Science 33, 1415–1423, Poon, Y. C. (1985). ‘Modeling of Round Bubble Plumes’. MSc Thesis. (University of Calgary: Alberta, Canada.) Rogers, G. F. C., and Mayhew, Y. R. (1974). ‘Engineering Thermodynamics: Work and Heat Transfer.’ (Longman: London, UK.) Marine and Freshwater Research 283 Sahoo, G. B., and Luketina, D. (2003). Modeling of bubble plume design and oxygen transfer for reservoir restoration. Water Research 37, 393–401. Schladow, S. G. (1992). Bubble plume dynamics in a stratified medium and the implications for water quality amelioration in lakes. Water Resources Research 28, 313–21. Schladow, S. G. (1993). Lake destratification by bubble-plume systems: design methodology. Journal of Hydraulic Engineering, ASCE 119, 350–68. UNESCO (1981). The practical salinity scale 1978, and the international equation of state 1980, 10th report of the joint panel on oceanographic tables and standards. UNESCO Technical Paper in Marine Sciences 36, 13–21. Wetzel, R. G. (1982). ‘Limnology.’ (Harcourt Brace College Publishers: Fort Worth, USA.) Wüest, A., Brooks, N. H., and Imboden, D. M. (1992). Bubble plume modeling for lake restoration. Water Resources Research 28, 3235–50. Yang, S. L., Tiew, K. N., and Char, C. T. (1993). Artificial destratification through aerat on in Upper Peirce Reservoir – its effects on water quality and chemical costs in treatment. Public Utility Board R&D Journal 5, 32–49. Zic, K. (1990). ‘Analysis and Simulation of Mixing of Stratified Lakes or Reservoirs by Air Bubble Plumes.’ PhD Dissertation. (University of Minnesota: USA.) Zic, K., Stefan, H. G., and Ellis, C. (1992). Laboratory study of water destratification by a bubble plume. Journal of Hydraulic Research 30, 7–27. Manuscript received 9 April 2002; revised and accepted 10 April 2003. 284 Marine and Freshwater Research G. B. Sahoo and D. Luketina Appendix 1 The rate of change of potential energy (∂PE/∂t) During instantaneous bubbler operation, each plume detrains at the top of the plume and entrains water below this. The detrained fluid enters the ambient layer that has the same density, referred to as the neutral-buoyancy layer. Due to this entrainment and detrainment process, the ambient neutral-buoyancy layer becomes thicker, ambient layers below the neutral-buoyancy layer shift downward and all ambient layers above the neutral-buoyancy layer shift upwards, causing an increase in the potential energy of the water column. There is no change in potential energy of the neutral-buoyancy layer itself. The rate of change of the potential energy of the water column is formulated in the remainder of this sub-section. The potential energy of a water column of depth h consisting of stratified water layers is: h PE = ∫ ρAgξdz (A -1) 0 where ρ is the density of the fluid in the layer of thickness dz at height ξ above the reservoir bed and z is positive upwards. For an Eulerian reference frame, ξ is invariant with time and the rate of change of potential energy of a water column of depth h having a cross-sectional area A = γζϕ with height ξ where γ and ϕ are constants, is then: h ∂ρ h ∂ρ ∂PE ∂ h ∂PE ∂PE = ∫ ρAgξdz ⇒ = g ∫ γξϕ+1dz ⇒ = g∫ uξdz ∂t ∂t 0 ∂ t ∂ t ∂ t 0 0 ∂z (A - 2) where u, the velocity at which fluid in an ambient layer at height ξ falls is given by: u = ∂z ∂t z=ξ = 1 ξ ∫ ( −q m )dz γξϕ 0 (A - 3) where qm is the entrainment flow rate per unit height (m2 s–1). Equation A-2 shows that the instantaneous rate of potential energy is independent of the shape of the reservoir. Equations A-2 and A-3 are invariant to the choice of datum, however, there is less numerical error in evaluating Equation A-2, if the datum is selected to coincide with the neutral-buoyancy layer since u changes rapidly in the vicinity of the neutral layer. It can be shown that Equation A-2 can be applied separately to each plume in a cascade and that the rate of change of potential energy due to each plume can be summed to find the rate of change of potential energy of the water column. Further, the neutral-buoyancy layer of each plume is used as the datum for that plume. Equation A-2 can be written in discrete terms for the Pth plume extending from layer LP-1 to the layer LP at the height of rise of the plume as: i=LP ρ − ρ i ∂PE P ≈ g ∑ i−1 i+1 ξi − ∑ q j 2 ∂t i=LP−1 j=LP−1 (A - 4) where ξi is the mid-depth height of the ith ambient layer above the neutral-buoyancy layer, ρi is the density of the ith ambient layer, qj is the entrainment (m3 s–1) from the jth layer of the reservoir, and L0 is the layer containing the diffuser. In order to satisfy continuity, the entrainment qj, is determined from: q = q plume, i j q j = q j = q plume, i − q plume, L P q j = 0 ∀ i ≠ Ln , LP ∀ i = Ln (A - 5) ∀ i = LP where Ln, is the neutral-buoyancy layer, qplume,i and qplume,LP represent the plume entrainment at the ith layer and detrainment at the top of the Pth plume from layer LP respectively. It can be shown that it is valid to apply Equation A-4 separately to each plume in a cascade and the rate of change of potential energy due to each plume can be summed to find the rate of change of potential energy of the whole water column so that: N i=L NP ∂PE i ρ − ρi+1 ∂PE P ≈ ∑P g ∑P i−1 = ∑ ξi − ∑ q j 2 ∂t P=1 i=L P=1 ∂t j=LP−1 P−1 (A - 6) where NP is the total number of plumes formed in the plume cascade within the water column h. The maximum change in potential energy (∆PEmix) Considering the reservoir bed as the datum, the initial and fully mixed state potential energy per unit surface area of any layer can be calculated. Therefore, the maximum change in potential energy (∆PEmix) per unit surface area (As = γhϕ) over the whole water column h is: i=L h ∆PE mixed h = gh −ϕ ∫ ( ρm − ρ) ξϕ+1 dz ≈ gh −ϕ ∑ ρm − ρi As i=L0 0 ( ) ξiϕ+1∆z (A - 7) Bubble-plume behaviour and destratification Marine and Freshwater Research 285 where Lh is the surface layer of the reservoir, ∆z is the layer thickness and ρm, the homogenous density of a fully mixed reservoir (i.e. after sufficient bubbler operation), is given by: ρm = i=L h ϕ 1h 1 ∑ γξ ρ ∆z ∫ ρAdz ≈ V0 V i=L0 i i (A - 8) where V is the volume of the reservoir. The maximum change in potential energy (∆PEmix) for linear stratification For a linear stratification of buoyancy frequency, N2 = –(g/ρr)∂ρ/∂z, the density ρ (kg m-3) can be approximated by, ρ = ρb(1–N2ξ/g), (where ρr has been approximated by the density at the bed ρb. The volume of a reservoir having a cross-sectional area A = γξϕ is: h h 0 0 V = ∫ Adz = ∫ γξϕ dz = γ h ϕ+1 ϕ +1 (A - 9) Substituting ρ = ρb(1–N2ξ/g) and Equation A-9 into Equation A-8 yields: ( ϕ +1) N 2 h ρm = ρb 1 − ( ϕ + 2) g (A -10) Substituting ρ = ρb(1–N2ξ/g) and Equation A-10 into Equation A-7 gives the maximum change in potential energy (∆PEmix) per unit surface area (As = γhϕ) over the whole water column h as: 1 ∆PE mixed ( ϕ +1) = h 3ρb N 2 − As ϕ + 3 ( ϕ + 2) 2 (A -11) Combining Equation 14, the definition of the buoyancy frequency and Equation A–11 gives: ∆PE mixed G2 3 1 ( ϕ +1) = 1.185 h 3g 2 − As ϕ + 3 ( ϕ + 2) 2 H (A -12) For a specific linear stratification of a reservoir of depth h, H is constant and thus 1.185h3gG2/3/H2 is constant so that ∆PEmixed/ As is a function of ϕ only. http://www.publish.csiro.au/journals/mfr