method of measurement of low resistance
advertisement

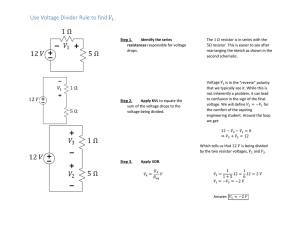
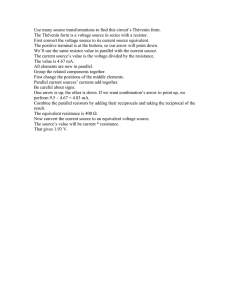
–3– 40/2125/NP METHOD OF MEASUREMENT OF LOW RESISTANCE 1 Scope This international standard specifies a method of measurement for low resistance less than 1 ohm. 2 Nomative reference The following referenced documents are indispensable for the application of this document. For dated references, only the edition cited applies. For undated references, the latest edition of the referenced document (including any amendments) applies. IEC 60115-1:2008, Fixed resistors for use in electronic equipment – Part 1: Generic specification IEC 60068-2-58:2004, Environmental testing – Part 2-58: Tests – Test Td: Test methods for solderability, resistance o dissolution of metallization and to soldering heat of surface mounting devices (SMD) 3 Tems and definitions For the purpose of this document, the following terms and definitions apply. 3.1 Low resistance the resistance less than 1 ohm which easy affected electrode and probe contact in resistance measurement. 3.2 Kelvin connection connection method for resistance measurement that uses separate pairs of current-carrying and voltage-sensing electrodes to eliminate the influence of contact and test lead resistances than twoterminal sensing. NOTE Kelvin connection is also known as Four-terminal sensing, 4-wire sensing or 4-point probe method. 4 4.1 Method of measurement Kelvin (4 point) connections For purpose of measurement on low resistance, Kelvin (4 point) connections shall be used to eliminate the inappropriate influence of the measuring circuit, e.g. contact resistance and wiring resistance. The measuring circuit consists of current supply terminals and voltage sensing terminals as shown in Figure 1. The current passing through the voltage sensing terminals (I LEAD ) is much lower than the measuring current (I RX ) thus the voltage drop across the lead wire of voltage sensing terminals is comparatively very small. Hence the resistance of the specimen is defined by the following formula. (See Figure 1) U R =U M (1) I=I LEAD +I RX =I RX (2) R X =UR /I RX =U M /I (3) –4– 40/2125/NP I I+ R LEAD U+ R LEAD I LEAD + CS VM I RX + UM UR - - U- R LEAD I- R LEAD RX Key: VM Voltmeter R LEAD Resistance of lead wire RX Resistance of specimen CS Current source UM Measured voltage UR Voltage across specimen resistor I Current of current supply terminal I LEAD Current of voltage sensing terminal I RX Current of specimen resistor Figure 1 – Kelvin (4 point) connections 4.2 Thermal electromotive force Measurement error occurs at the connecting point, if there is a temperature difference between dissimilar metal arising from Seebeck effect. If the error cannot be ignored, the following methods shall be used. 4.2.1 Current inversion method Measurement results of positive and negative current can compensate thermal electromotive force. As shown in Figure 2, thermal electromotive force V EMF which occurs between dissimilar metal has constant polarity regardless of current polarity, thermal electromotive force can avoid by 2 times measurements by added polarity reversal voltage. Measured voltage U M+ comes from added positive voltage as shown in Figure 2 a), U M + = V EMF +I・R X (1) and added to polarity reversed voltage as shown in Figure 2 b), comes to; U M - = V EMF -I・R X . (2) Then the average is exclusive of thermal electromotive force. U M = (U M + -U M - ) / 2 = I・R X (3) Hence the resistance of the specimen shall be calculated from the following formula; R X = (U M + -U M - ) / (2・I) (4) –5– 40/2125/NP V EMF V EMF - + I RX UM RX I + - b) Negative polarity a) Positive polarity Key: RX UM V EMF I UM Resistance of specimen Measured voltage Thermal electromotive voltage Measured current Figure 2 – Current inversion method 4.2.2 Offset correction method The measuring current shall be switched on and off in a series of cycles as shown in Figures 3. Measured voltage when applied measuring current include thermal electromotive force as shown in Figure 3 b). U M1 = V EMF + I・R X (1) U M2 equal to thermal electromotive voltage without measuring current as shown in Figure 3 c). U M2 = V EMF (2) Compensated voltage which subtracted thermal electromotive force can be calculated from the following formula. U M = U M1 – UM2 (3) U M = (V EMF + I・R X ) – V EMF (4) U M = I・R X (5) The resistance of the specimen can be calculated by dividing voltage U M by measuring current I. Rx=U M / I (6) Measuring cycle ON Measuring current OFF Measurement of Thermal electromotive force a) Measuring cycle for offset correction method –6– 40/2125/NP V EMF V EMF + + RX I RX U M1 U M2 - - b) Measuring current on cycle c) Measuring current off cycle RX Resistance of specimen V EMF Thermal electromotive voltage I Measuring current Figure 3 – Offset correction method 4.3 Self-heating Temperature rise occurs from self-heating by measuring current. If the temperature coefficient of the resistor is such that this effect cannot be ignored the following methods shall be used. 4.3.1 Short-term trigger method Short-term measuring current pulse shall be supplied by one time trigger to avoid temperature rise by self-heating of specimen. 4.3.2 Comparison with measurement reference resistor method Measuring current shall apply to series-connected measured standard resistor and specimen as shown in Figure 4. Each voltage drop of standard resistor and specimen shall be measured by switching between them. The resistance of the specimen shall be calculated from the ratio of the measured voltages and the measurement standard resistance from the following formula; U M1 = I・R X (1) U M2 = I・RREF (2) R X = V M1 ・R REF / V M2 (3) RX SW I SW VM R REF Key: RX Resistance of specimen R REF Measured standard resistance I Measuring current Figure 4 – Comparison with measurement reference resistor –7– 5 5.1 40/2125/NP Measurement procedure Leaded resistors and without mounting on a test substrate When the resistance is to be measured without mounting on a test substrate, Kelvin (4 point) contact probe shall be used as shown in Figure 5. For leaded resistors distance from the resistor body shall be within 5 mm to avoid resistance of lead wire, unless otherwise specified in the detail specification. Contact condition ( position, pressing force and probe head durability) should be stable. The self heating and thermal electromotive force of resistors should be considered to mitigate the effect on measurement of resistance. Distance from resistor body Current probe I+ Voltage sensing probe Voltage sensing probe U- U+ Current probe I- Voltmeter Current source NOTE1 Kelvin (4 point) contact probe consists of alignment mechanism, current source and voltmeter, 2 current probes and 2 voltage-sensing probes. Figure 5 – Kelvin (4 point) contact probe 5.2 Surface mount resistors When the resistance value is to be measured after mounting on a test substrate in accordance with IEC 60115-1 4.31, Kelvin (4 point) connection to the soldering pads shall be as shown in Figure 6. Voltage-sensing lines shall be attached inside the soldering pad to eliminate the resistance component of soldering pad and solder joint. The resistor should be mounted on the test substrate same attitude with normal use. Detail soldering condition should be prescribed in relevant specification. –8– 40/2125/NP Surface mount resistor Solder Test substrate Current-carrying lines Voltage sensing lines Key: □ solderable area ■ non solderable area, conductor covered with solder resist Figure 6 – Soldering pad of Test substrate for Kelvin (4 point) connections When the resistance value is to be measured without mounting on a test substrate, Kelvin (4 point) contact probe shall be used as shown in Figure 7. The contact position to the resistor’s electrode of current probe should be edge side and voltage probes should be bottom side unless otherwise defined in the detail specification. Resistor Electrode Edge side Bottom side Current probes I+ Voltage probes U- U+ Voltmeter Current source Figure 7 – Kelvin (4 point) contact probe I-