Erle Robotics: Erle-brain, a Linux brain for drones
advertisement

TableofContents
1. Introduction
i. BeagleBoneBlack
ii. PixHawkFirecape
iii. Anti-vibrationsystem
iv. Specifications
v. References
2. Erle-Brain
i. TechnologyDescription
i. Processor
ii. Memory
iii. SystemPower
iv. CurrentMeasurement
v. USB
vi. EEPROM
vii. ADC
viii. I/O
ix. Sensors
x. HardwareMap
ii. ComplementaryDevices
i. PowerModule
ii. GPS
iii. Buzzer
iv. Dongles
3. Software
i. Quickstart
ii. Updatingthesofware
i. Fromsource
iii. OperatingSystem
iv. Autopilot
v. RealTime
i. SCHED_DEBUG
ii. ThreadPriorities
iii. Linuxkernel
vi. Clockproblems
vii. PRU
viii. ROS
i. Concepts
ii. TechnicalOverview
ix. LinksArdupilot
4. Vehicles
i. Copter
i. Connections
ii. Plane
i. Connections
iii. Rover
i. Connections
5. Tutorials
i. Peripherals
i. BlinkaLED
ii. BlinkaLEDinC++
ii. Miscelaneous
i. Backup
ii. CopyimagetomicroSDcard
iii. ExpandingtheFileSystemPartitionontheSD
iv. ResizeyourmicroSDcard
v. Howtofetserialoverusb
vi. HowtoinstantiateI2Cfromtheuserspace
iii. ROStutorials
i. InstallingandConfiguringYourROSEnvironment
ii. NavigatingtheROSFilesystem
iii. CreatingaROSPackage
iv. BuildingaROSPackage
v. UnderstandingROSNodes
vi. UnderstandingROSTopics
6. Contactinformation
7. Legalnote
Erle-brain
Erle-brainisanopenhardwareandopensourceLinux-basedautopilotformakingdrones.ItconsistsofaBeagleBone
BlackandaPixHawkFireCapeandcomeswithaDebianimageflashed,ROSpreinstalledandthelatestreadytoflycode
;).
ThePixHawkFireCape(PXF)isadaugtherboardfortheBeagleBoneBlack(BBB)developmentboardthatallowsto
createafullyfunctionalLinuxautopilotfordrones.ThecombinationofBBBandPXFallowstohaveaLinuxcomputerthat
cancreaterobots.
WeshipErle-brainwiththefollowingcharacteristics:
DebianWheezy7.5
ROSHydroMedusa
APM3.2-rc14
4GBeMMCandmicroSDcardcapable
Cortex-A8@1GHz
512MBRAM
12PWMoutputs
RCInputusingeitherPPM-SUMorS.Bus
1USBHost,1UART,3I2C,Buzzerconnector,Failsafeconnector.
Thehardwarehasmanymoreperipheralsandweareworkinghardtobringthemout.
Toacquiretheboardvisiterleroboticsstore.
NOTE:ThePixHawkFireCapeisstillindevelopmenttherebysomeofthesystemsincludedmightnothavefull
supportatthetimeofshipment.
About
Foryearswe'vebeenworkingintheroboticsfield,particularlywithdrones.WehavepassedthroughdifferentUniversities
andresearchcentersandinalltheseplacesweactuallyfoundthatmostofthedronesareblackboxes(checkoutour
60spitch).Notmeanttobeusedforlearning,research.Thesoftwaretheyuseisinmostofthecasesunknown,closed
sourceornotdocumented.Giventheseconditions,howarewegoingtoeducatethenextgenerationsonthis
technologies?Howdoyougetstartedprogrammingdronesifyoudon'thave$1000+budget?Whichplatformallowsmeto
getstartedwithdroneswithoutriskingahand?
Wearecomingupwithananswertoallthesequestions,ourtechnologyatErleRoboticsandourdronesbrain:Erle-brain.
InspiredbytheBeagleBonedevelopmentboard,wehavedesignedasmallcomputerwithabout36+sensors,plentyofI/O
andprocessingpowerforreal-timeanalysis.Erleistheenablingtechnologyforthenextgenerationofaerialandterrestrial
robotsthatwillbeusedincitiessolvingtaskssuchassurveillance,enviromentalmonitoringorevenprovidingaidat
catastrophes.
Oursmall-sizeLinuxcomputerisbringingroboticstothepeopleandbusinesses.
License
Unlessspecified,thiscontentislicensedundertheCreativeCommonsAttribution-NonComercial-ShareAlike3.0Unported
License.Toviewacopyofthislicense,visithttp://creativecommons.org/licenses/by-sa/3.0/orsendalettertoCreative
Commons,171SecondStreet,Suite300,SanFrancisco,California,94105,USA.
AllderivativeworksaretobeattributedtoErleRoboticsS.L..Foralistofauthorsreferto
erle_gitbook_erlebrain/graphs/contributors.
Foranyquestions,concerns,orissuessubmitthemtosupport[at]erlerobot.com.
BeagleBoneBlack
BeagleBoneBlack(BBB)isanopen-hardwarelow-costboarddesignedfordevelopersandhobbyists.Thisboardhasbeen
developedbytheBeagleBoardorganization,aisnon-profitcompromisedwiththedevelopmentofopenhardwarewitha
hugecommunityofdevelopersandusers.
Thisspecificboardhasbecomeverypopularduetoitslowcost(~35€/~55$)andhighfeatures:
ItcanbootLinux(Debian,Ubuntu,Angströmdistros)in10secondsthankstotheCortex-A8processor,isableto
workasastand-alonecomputer,ithasreal-time2xPRUmicrocontrollers,itslargeconnectivityoptions(USB,
Ethernet,HDMI,SPI,I2C,GPIOs,...)andlargeamountofcapesavailable.
IfyouwouldreadmoreabouttheBBBchecktheBeagleBoard'sweb.
PixHawkFireCape
ThePixHwakFireisacapedesignedfortheBeagleBoneBlackthatallowstocreateafullyfunctionalLinuxautopilot.This
capehasallthesensors,conectorsandbusesneededthatallowstheautopilot'ssoftwaretoexecuteproperly.Thisboard
isanopen-hardwarecape.Youcancheckthedesignhere.
TheunionoftheBeagleBoneBlackandthePixHawkFire,makestheErle-Brainahighlymodularandcustomizable
system.
Note:Thiscapeisstillindevelopmentstage.Therefore,newfunctionalitiesandversioncouldberealeased.
ThePixHawkFireCapecanbepurchasedfromtheErleRoboticsstore.
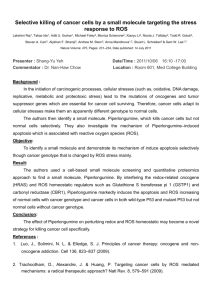
Anti-vibrationsystem
Asithasbeenintroducedinprevioussections,Erle-brainputstogethertheBBBandthePXF.Wewantedtomakeiteven
bettertherebywe'veaddedananti-vibrationsystemthatmakesthesensingmorerobust:
Erle-BrainSpecifications
Electricalspecifications
Powersupply
5Vsupply
Powermoduleconector
ESCsignalcables(needdomesoldering)
Indicators
3normalLEDs
RGBLED
Connectors
4xUARTs
1ADCconector
1CAN
3xI2C
1Buzzerout
1Safetyswitch
12PWMoutchannels
1PPM/S.Busout
1PPM/S.Busin
1Spectrumin
1Powerbrickin
1Backupbatteryconector
Powerconsumption
MODE
consumption(mA)
Idling@UBoot
235
KernelBooting(Peak)
442
KernelIdling
323
DongleWiFicreatinghotspot
469
Autopilot(APM)+ROS
397
Autopilot(APM)+ROS+Dongleinhotspot
569
Mechanicalspecifications
Size
95.6x75.27x36.2mm
Layers
6(BBB)+6(PXF)
PCBThickness
1.6
Weight
110grams
References
V.Mayoralet.al.,"Towardsanopensourcelinuxautopilotfordrones".LibreCon2014,November2014[pdf]
Erle-Brain
InspiredbytheBeagleBonedevelopmentboard,wehavedesignedasmallcomputerwithabout36+sensors,plentyofI/O
andprocessingpowerforreal-timeanalysis.Erleistheenablingtechnologyforthenextgenerationofaerialandterrestrial
robotsthatwillbeusedincitiessolvingtaskssuchassurveillance,enviromentalmonitoringorevenprovidingaidat
catastrophes.
Erle-BrainTechnologyDescription
Overview
BelowthemostrelevantfeaturesoftheErle-Brainarepicturedinatable:
Feature
Processor
AM3359,ARMCortexA8720MHz
Memory
256MBDDR2400MHz
Power
Management
TPS65217B,PowerRegulators,LiIONSinglecellbatterycharger,20mALEDBacklightdriver,39V,
PWM
Debug
Support
USBtoSerialAdapter,OnBoardJTAGviaUSB(boththroughtheminiUSBport),4UserLEDs
Power
USB(onlyboardispowered),2SLiPobatterywithBEC(5V)
Indicators
PowerLED
USB
USB2.0ClientPort(miniUSB),USB2.0HostPort(USBTypeASocket,500mALS/FS/HS)
SD/MMC
Connector
microSD,3.3V
User
Interface
ResetButton,Bootbutton
Overvoltage
Protection
Shutdown@5.6VMAX(onlyboard)
Expansion
Connectors
Power5V,3.3V,VDD_ADC(1.8V),3.3VI/Oonallsignals,McASP0,SPI,I2C,GPIO(65),LCD,
GPMC,MMC1,MMC2,7AIN(1.8VMAX),4Timers,3SerialPorts,CAN0,eHRPWM(8),XDMA
Interrupt,LEDBacklight
Weight
110grams
Processor
TherobotcurrentlyusestheAM3359(achangetoAM3358,whichprovides1GHzspeedisexpected)inthe15x15
package.Actualprocessorspeedwillbedeterminedbytheactualdevicessuppliedbutitwon'tbelowerthan720MHz.
Memory
Asingle16bitDDR2memorydeviceisused.Thedesignsupports128MBor256MBofmemory.Thestandard
configurationis256MBat400MHz.
ThedesignusesasingleMT47H128M16RT-25E:C400MHZmemoryfromMicronwhichcomesinan84-Ball9.0mmx
12.5mmFBGApackage.Theaddressingconfigurationisshowninthefollowingtable:
Parameter
128Megx16
Configuration
16Megx16x8banks
RefreshCount
8K
RowAddress
A[13:0](16K)
BankAddress
BA[2:0](8)
ColumnAddress
A[9:0](1K)
TheDDR2connectsdirecttotheprocessorandnoexternalinterfacedevicesarerequired.PowerissuppliedtotheDDR2
viathe1.8VrailontheTPS65217B.
SystemPower
Theselectionofeitherthe5VDCortheUSBasthepowersourceishandledinternallytotheTPS65217Bandautomatically
switchesto5VDCpowerifbothareconnected.SWcanchangethepowerconfigurationviatheI2Cinterfacefromthe
processor.Inaddition,theSWcanreadtheTPS65217Banddetermineiftheboardisrunningonthe5VDCinputorthe
USBinput.Thiscanbebeneficialtoknowthecapabilityoftheboardtosupplycurrentforthingslikeoperatingfrequency
andexpansioncards.
PowerManagementIntegratedCircuit(PMIC)
ThemainPowerManagementIC(PMIC)inthesystemistheTPS65217B.TheTPS65217Bisasinglechippower
managementICconsistingofalineardual-inputpowerpath,threestep-downconverters,fourLDOs,andahigh-efficiency
boostconvertertopowertwostringsofupto10LEDsinseries.ThesystemissuppliedbyaUSBportorDCadapter.
Threehigh-efficiency2.25MHzstep-downconvertersaretargetedatprovidingthecorevoltage,MPU,andmemoryvoltage
fortheboard.
Thestep-downconvertersenteralowpowermodeatlightloadformaximumefficiencyacrossthewidestpossiblerangeof
loadcurrents.Forlow-noiseapplicationsthedevicescanbeforcedintofixedfrequencyPWMusingtheI2Cinterface.The
step-downconvertersallowtheuseofsmallinductorsandcapacitorstoachieveasmallsolutionsize.
LDO1andLDO2areintendedtosupportsystem-standbymode.InSLEEPstateoutputcurrentislimitedto100uAto
reducequiescentcurrentwhereasinnormaloperationtheycansupportupto100mAeach.LDO3andLDO4cansupport
upto285mAeach.BydefaultonlyLDO1isalwaysONbutanyrailcanbeconfiguredtoremainupinSLEEPstate.
EspeciallytheDCDCconverterscanremainupinalow-powerPFMmodetosupportprocessorSuspendmode.The
TPS65217Boffersflexiblepower-upandpower-downsequencingandseveralhouse-keepingfunctionssuchaspowergoodoutput,pushbuttonmonitor,hardwareresetfunctionandtemperaturesensortoprotectthebattery.
Theselectionofeitherthe5VDCortheUSBasthepowersourceishandledinternallytotheTPS65217Bandautomatically
switchesto5VDCpowerifbothareconnected.SoftwarecanchangethepowerconfigurationviatheI2Cinterfacefromthe
processor.Inaddition,thesoftwarecanreadtheTPS65217Banddetermineiftheboardisrunningonthe5VDCinput
ortheUSBinput.Thiscanbebeneficialtoknowthecapabilityoftheboardtosupplycurrentforthingslikeoperating
frequencyandexpansioncards.
5VDCPowerInput
A5VDCsupplycanbeusedtoprovidepowertotheboard.Thepowersupplycurrentdependsonhowmanyandwhat
typeofaddonboardsareconnectedtotheboard.Fortypicaluse,a5VDCsupplyratedat1Ashouldbesufficient.If
heavieruseoftheexpansionheadersorUSBhostportisexpected,thenahighercurrentsupplywillberequired.A
NCP349overvoltagedeviceisusedtopreventtheplugginginof7to12Vpowersuppliesbymistake.TheNCP349will
shutdownandtheboardwillnotpoweron.Novisibleindicatorisprovidedtoindicatethatanovervoltageconditionexists.
Theboardwillnotpowerup.
USBPower
TheboardcanalsobepoweredfromtheUSBport.AtypicalUSBportislimitedto500mAmaximum.Whenpowering
fromtheUSBport,theVDD_5Vrailisnotprovidedtotheexpansionheader.SoCapesthatrequirethatrailwillnothavethat
railavailableforuse.
The5VDCsupplyfromtheUSBportisprovidedontheSYS_5VrailoftheexpansionheaderforusebyaCape.
Powerconsumption
MODE
USB(mA)
DC(mA)*
DC+USB(mA)
Reset
200
80
220
UBoot
370
250
330
Kernelbooting(peak)
510
360
470
KernelIdling
300
180
300
*ThiscolumnshowstheapproximateconsumptionoftheboardwhenpoweredfromtheESCs(5VBEC).
WhentheUSBisconnected,theFT2232andHUBarepoweredupwhichcausesanincreaseinthecurrent.IftheUSBis
notconnected,thesedevicesareinlowpowerstate,thereforethissavesroughly120mAofcurrentandisthereasonfor
theincreasedcurrentwhentheUSBisconnected.
Thecurrentwillfluctuateasvariousactivatesoccur,suchastheLEDsonandSDcardaccesses.
CurrentMeasurement
TheBeagleBonehasamethodunderwhichthecurrentconsumptionoftheboard,notcountingtheUSBHostportand
expansionboards,canbemeasured.Thevoltagedropacrossa.1ohmresistorismeasuredtodeterminethecurrent
consumption.
SYS_5VConnection
TheSYS_5Vrailismeasuredtodeterminethehighsideoftheseriesresistor.TheSYS_5VrailisconnectedtotheMUX_OUT
pin.Priortobeingconnectedtotheinternalsecondmultiplexer,thevoltageisdividedby3.A5Vsignalwillresultina
voltageof1.66VattheMUX_OUTpin.
SYS_VOLTConnection
TheSYS_VOLTrailismeasuredtodeterminethehighsideoftheseriesresistor.TheSYS_VOLTrailisconnectedtothe
MUX_OUTbysettingtheregistersinsidetheTPS65217B.TheresistorsR2andR1areprovidedtokeepthesame
voltagedividerconfigurationasfoundintheSYS_5VraillocatedinternaltotheTPS65217B.However,a5Vrailwillgiveyou
1.41Vasopposedtothe1.66VfoundinternaltotheTPS65217B.Thisworksouttoadivisorof2.8.Besureandworkthis
intoyourfinalcalculations.
MUX_OUTConnection
TheMUX_OUTconnectionisdividedby2beforebeingconnectedtotheprocessor.Thereasonforthisisthatifthebattery
voltageisconnected,ithasnovoltagedividerinternally.Ifconnecteditcoulddamagetheprocessor.Whencalculatingthe
voltagesforeithersideoftheresistors,thatvoltageisdividedby2.Besureandincludethisinyourcalculations.
CurrentCalculation
Thecalculationforthecurrentisbasedon.1mVisequalto1mA.Youcanusethefollowingformulatocalculatethecurrent
usingthevoltagereadingsasreadbytheprocessor.
(((SYS_5V*2)*3.3)-((SYS_VOLT*2)*3.54)))/.1=Total(mA)
USB
USB0Port
TheHUBconnectsdirecttotheUSB0portontheprocessor.ThisallowsthatporttobeaccessiblefromthesameUSB
connectorastheSerialandJTAGports.
USBClientPort
AccesstoUSB0isprovidedviatheonboardUSBHub.ItwillshowuponaPCasastandardUSBserialdevice(usually
/dev/tty[something]).
USB1Port
OntheboardisasingleUSBTypeAconnectorwithfullLS/FS/HSHostsupportthatconnectstoUSB1ontheprocessor.
Theportcanprovidepoweron/offcontrolandupto500mAofcurrentat5V.
UnderUSBpower,theboardwillnotbeabletosupplythefull500mA,butshouldbesufficienttosupplyenoughcurrentforalowerpow
Ifmorecurrentisneededwerecommendusingabattery.
Youcanuseawirelesskeyboard/mouse/screenconfigurationoryoucanaddaHUBforinterfacingwithdevicesifrequired.
ElectricallyErasableProgrammableReadOnlyMemory
(EEPROM)
TherobotErleisequippedwithasingleCAT24C256WEEPROMtoallowtheSoftwaretoidentifytheboard.
Name
Size
(bytes)
Contents
Header
4
0xAA,0x55,0x33,0xEE
BoardName
8
NameforboardinASCII:A335BONE
Version
4
HardwareversioncodeforboardinASCII:00A3forRevA3,00A4forRevA4,00A5
forRevA5,00A6forRevA6
Serial
Number
12
Serialnumberoftheboard.12characterstringisASCIIwiththefollowingscheme:
WWYY4P16nnnn,whereWWisa2digitweekoftheyearofproduction,YYcorresponds
totheyearofproduction,nnnnisanincrementingboardnumber.
Configuration
option
32
ASCII:0000000000000000000000000000000(640sinhex)
RSVD
6
ASCII:000000
RSVD
6
ASCII:000000
RSVD
6
ASCII:000000
Security
20
Boardtheftprotection
Available
32682
Availableforothernon-volatilecode/data
ADC
Theprocessorhas8ADC(AnalogtoDigital)converterinputs.Thesignalsare1.8Vonlyinterfaces.Oneofthese,AD7,is
connectedtothePMIC(PowerManagementIntegratedCircuit)TPS65217Bandusedformeasuringvoltagesandcurrent
viatheTPS65217B.
ADCInputs
TheprimarypurposeoftheADCpinswasintendedforuseasaTouchscreencontrollerbutcanbeusedasageneral
purposeADC.Eachsignalisa12bitsuccessiveapproximationregister(SAR)ADC.Samplerateis100Ksamplesper
second.ThereisonlyoneADCintheprocessoranditcanbeconnectedtoanyofthe8ADCpins.
VDD_ADCInterface
ThesignalVDD_ADCisprovidedviatheexpansionheader,butisnotavoltagerailthatistobeusedtopoweranything
onanexpansionboard.Itissuppliedfromthe1.8VrailoftheTPS65217Bandisrunthroughaninductorfornoise
isolation.ItisthereifneedforexternalcircuitrytohaveaccesstotheVREFrailoftheADCortoaddadditionalfilteringvia
acapacitorifneeded.
MoreaboutI/O
InterIntegratedCircuits(I²C)
I²C(Inter-IntegratedCircuit)(alternatelyspelledI2CorIIC,mostcommonlypronouncedI-squared-C)isamultimasterserial
single-endedcomputerbusinventedbythePhilipssemiconductordivision,todayNXPSemiconductors,andusedfor
attachinglow-speedperipheralstoamotherboard,embeddedsystem,cellphone,orotherdigitalelectronic
devices.
Severalcompetitors,suchasSiemensAG(laterInfineonTechnologiesAG,nowIntelmobilecommunications),NEC,Texas
Instruments,STMicroelectronics(formerlySGS-Thomson),Motorola(laterFreescale),andIntersil,haveintroduced
compatibleI²Cproductstothemarketsincethemid-1990s.
SinceOctober10,2006,nolicensingfeesarerequiredtoimplementtheI²Cprotocol.However,feesarestillrequiredto
obtainI²CslaveaddressesallocatedbyNXP.
Interestingremark
SMBus,definedbyIntelin1995,isasubsetofI²Cthatdefinestheprotocolsmorestrictly.OnepurposeofSMBusistopromoterobust
I²CintheErle-Brain
TheeducationaldroneErleincludes3I²Cbussesavailableunder/dev:/dev/i2c-0,/dev/i2c-1and/dev/i2c-2.
/dev/i2c-2isbydefaultnotactivated.Inordertoactivateityoushouldtype:
echoBB-I2C1>$SLOTS
Youcanverifythatithasbeenactivatedtyping:
cat$SLOTS
InspectingI²C
AgoodtooltoinspecttheI²Cbusisthei2cdetectbashcommand:
i2cdetect-r1
WARNING!ThisprogramcanconfuseyourI2Cbus,causedatalossandworse!
Iwillprobefile/dev/i2c-1usingreadbytecommands.
Iwillprobeaddressrange0x03-0x77.
Continue?[Y/n]
0123456789abcdef
00:-------------------------10:------13-----------------------20:-------------------------------30:-------------------------------40:-------------------------------50:--------UUUUUUUU---------------60:----------------68-------------70:----------------
Thiscommandsendsapingtothe0x03-0x77range(inhexadecimal)andrecordstheanswersineveryaddressthereby
it'sabletofigureoutifthereareanydevices.Particularlywecanseethattheaddresses0x13and0x68answeredwhich
correspondtotheIRandIMUsensorsrespectively.
InstantiateI²Cdevicesfromtheuserspace
TheLinuxkernelalsoallowstomanuallyconfigureI²Cdevicesthroughasysfsinterface:
Ingeneral,thekernelshouldknowwhichI2Cdevicesareconnectedandwhataddressestheyliveat.However,in
certaincases,itdoesnot,soasysfsinterfacewasaddedtolettheuserprovidetheinformation.Thisinterfaceis
madeof2attributefileswhicharecreatedineveryI2Cbusdirectory:new_deviceanddelete_device.Bothfilesare
writeonlyandyoumustwritetherightparameterstotheminordertoproperlyinstantiate,respectivelydelete,anI2C
device.
Filenew_devicetakes2parameters:thenameoftheI2Cdevice(astring)andtheaddressoftheI2Cdevice(a
number,typicallyexpressedinhexadecimalstartingwith0x,butcanalsobeexpressedindecimal.)
Filedelete_devicetakesasingleparameter:theaddressoftheI2Cdevice.Asnotwodevicescanliveatthesame
addressonagivenI2Csegment,theaddressissufficienttouniquelyidentifythedevicetobedeleted.
Example:echoeeprom0x50>/sys/bus/i2c/devices/i2c-3/new_device
Whilethisinterfaceshouldonlybeusedwhenin-kerneldevicedeclarationcan'tbedone,thereisavarietyofcases
whereitcanbehelpful:
TheI2Cdriverusuallydetectsdevices(method3above)butthebussegmentyourdevicelivesondoesn'thave
theproperclassbitsetandthusdetectiondoesn'ttrigger.
TheI2Cdriverusuallydetectsdevices,butyourdevicelivesatanunexpectedaddress.
TheI2Cdriverusuallydetectsdevices,butyourdeviceisnotdetected,eitherbecausethedetectionroutineis
toostrict,orbecauseyourdeviceisnotofficiallysupportedyetbutyouknowitiscompatible.
Youaredevelopingadriveronatestboard,whereyousolderedtheI2Cdeviceyourself.
Thisinterfaceisareplacementfortheforce_*moduleparameterssomeI2Cdriversimplement.Beingimplemented
ini2c-coreratherthanineachdevicedriverindividually,itismuchmoreefficient,andalsohastheadvantagethat
youdonothavetoreloadthedrivertochangeasetting.Youcanalsoinstantiatethedevicebeforethedriveris
loadedorevenavailable,andyoudon'tneedtoknowwhatdriverthedeviceneeds.
Consideringthis,wecouldinstantiateasensor(hih6130)connectedto/dev/i2c-1andwithaddress0x27doing:
echohih61300x27>/sys/bus/i2c/devices/i2c-1/new_device
Afterthat,thedevicewillbeavailableunder/sys/bus/i2c/drivers/hih6130/1-0027.
Toremovethedeviceyoucanuse:
echo0x27>/sys/bus/i2c/devices/i2c-1/delete_device
Sources
Wikipedia
Linuxkerneldocumentation
Sensors
BelowthesensorsincludedinErle-Brainaredescribed:
InertialMeasurementUnits(IMUs)
Sensor
Features
MPU6000
3-axisgyroscopeand3-axisaccelerometer.I2CandSPI
MPU9250
3-axisgyroscope,3-axisaccelerometerand3-axismagnetometer.I2CandSPI
LSM9DS0
3-axisgyroscope,3-axisaccelerometerand3-axismagnetometer.I2CandSPI
Barometers
Sensor
MS5611-01BA03
Features
Barometer.SPI
Whysomanysensors?
Well,thinkaboutthepossibilitiesofusingnewalgorithmsandcontroltechniqueswithmanysourcesofinformation.
Webelievethatthelackofprecisioncanbegreatlycompensatedwiththequantityweprovideachievingbothanaffordable
priceandamazingresults;).
HardwareMap
BelowwepresentthehardwaremappinoutofthePXF:
Pin
Function
Pin
Function
P8.1
GND
P9.1
GND
P8.2
GND
P9.2
GND
P8.3
MMC1_DAT6
P9.3
3V3
P8.4
MMC1_DAT7
P9.4
3V3
P8.5
MMC1_DAT2
P9.5
VDD_5V
P8.6
MMC1_DAT3
P9.6
VDD_5V
P8.7
MPU_6500_DRDY
P9.7
SYS_5V
P8.8
ACCEL_DRDY
P9.8
SYS_5V
P8.9
GYRO_CS
P9.9
PWR_BUT
P8.10
MAG_DRDY
P9.10
3v3_EN
P8.11
SBUS_OUTPUT_EN
P9.11
USART4_RX
P8.12
FRAM_CS
P9.12
VDD_5V_PERIPH_EN
P8.13
VDD_5V_PERIPH_OC
P9.13
USART4_TX
P8.14
MPU_6000_DRDY
P9.14
UBLED-SCL
P8.15
PPM_INPUT
P9.15
LED_BLUE
P8.16
SERVO_RAIL_IN_EN
P9.16
UBLED-SDA
P8.17
VDD_3V3_SEPKTRUM_EN
P9.17
ACCEL_MAG_CS
P8.18
VDD_SERVO_IN_FAULT
P9.18
SPI_0_MISO
P8.19
VDD_5V_HIPOWER_OC
P9.19
I2C2_SCL
P8.20
MMC1_CMD
P9.20
I2C2_SDA
P8.21
MMC1_CLK
P9.21
SPI_0_MOSI
P8.22
MMC1_DAT5
P9.22
SPI_0_SCK
P8.23
MMC1_DAT4
P9.23
SPI_1_MPU_CS2
P8.24
MMMC1_DAT1
P9.24
CAN1_RX_1
P8.25
MMC1_DAT0
P9.25
LED_AMBER
P8.26
LED_SAFETY
P9.26
CAN1_TX_1
P8.27
CH_2
P9.27
3V3_EN
P8.28
CH_1
P9.28
SPI_1_MPU_CS
P8.29
CH_4
P9.29
SPI_1_MOSI
P8.30
CH_3
P9.30
SPI_1_MISO
P8.31
USART5_CTS
P9.31
SPI_1_SCK
P8.32
USART5_RTS
P9.32
VDD_ADC
P8.33
USART4_RTS
P9.33
VDD_5V_SENS
P8.34
GYRO_DRDY
P9.34
GND_ADC
P8.35
USART4_CTS
P9.35
BATT_CURRENT_SENS
P8.36
ALARM
P9.36
BATT_VOLTAGE_SENS
P8.37
USART5_TX
P9.37
AUX_ADC1
P8.38
USART5_RX
P9.38
AUX_ADC2
P8.39
CH_6
P9.39
VDD_SERVO_SENS
P8.40
CH_5
P9.40
PRESSURE_SENS
P8.41
CH_8
P9.41
SAFETY
P8.42
CH_7
P9.42
SPI_1_BARO_CS
P8.43
CH_10
P9.43
GND
P8.44
CH_9
P9.44
GND
P8.45
CH_12
P9.45
GND
P8.46
CH_11
P9.46
GND
ComplementaryDevices
ComplementaryhardwarecanbeconnectedtoErle-Brainthankstotheconnectors(I2C,CAN,buzzer,safety,...).This
enablesthecustomizationofErle-Coptertoapplicationneeds.Inthenextpages,alistofavailablematerialisdescribed.
Thisdevicesaresoldinourstore.
PowerModule
ThePowerModuleincorporatesbothawaytopoweryourautopilot,accessoriesandreportbatteryvoltageandcurrentto
thePXF.Allthroughasingleandtightlyincluded6-pincablethatdirectlymatchesthePXF’sconnector.Theon-board
switchingregulatoroutputs5.3Vatamaximumof2.25A,andcanbeusedupto18Volts(4SLiPo)andatamaximumof90
amps.ThePowerModuleisreadytousewithXT60connectorspre-fitted,andshrinkwrappedforprotection.
Note:ThePowerModuleisratedat2.25AmpstopowerthePXF’s,receiverandperipherals(GPSandTelemetryradio)
ONLY.TopowerservosuseanESCwithanadequateBECorastandaloneBECpluggedintotheoutputbus,andremove
jumper1toisolatethetwopowerlines.
Description
Name
Values
MaxInputVoltage
18V
MaxCurrentSensing
90A
Switchingregulatoroutputs
5.3Vat2.25Amax
Checkmoreinformationinproduct'spageinourstore.
GPS
ThisdesignincorporatesaGPSuBloxNeo-7MandtheHMC5883Ldigitalcompass.Thekitalsoincludesamoldedcase
andpedestalmountwhichprovidesaconvenientwayofmountingthemodulehighandawayfrompossiblesourcesof
interference.
ThisGPSmodulesignificantlyoutperformstheMediatekGPSduetothelargerantennaandnext-genchipset.Anexcellent
solutionformulticoptersandroversinparticular,whereGPSaccuracyisparamount.Itfeaturesactivecircuitryforthe
ceramicpatchantenna,rechargeablebackupbatteryforwarmstarts,andI2CEEPROMforconfigurationstorage.
ThemoduleiscompatiblewithAPM-basedautopilotssuchasErle-brain.
Features
38400bauds
uBloxNeo-7Mmodule
56-channel
GPSL1C/A,GLONASSL1FDMA
QZSSL1C/A
GalileoE1B/C
SBAS:WAAS,EGNOS,MSAS
10Hzupdaterate
25x25x2[mm]Ceramicpatchantenna
Rechargeable3VBackupbattery
Lownoise3.3Vregulator
I2CEEPROMstorage
PowerandfixLED’s
PedestalMount/Case
APMcompatible
LNAMAX2659ELT+
Pre-configured38,400Baudandprams
Specifications
Size:60×11.5mm
Mount:140mmlength
Cablelength:200mm
Weight:26g
Connection:DF13(compass)4pin/(GPS)6pin(APMcompatible)
Cables
GPS6pinsconnector:
Red:Vcc(5v)
Yellow:TX
Green:RX
NC
NC
Black:GND
Compass4pinsconnector:
Red:SDA
Black:SCL
Checkmoreinformationinproduct'spageinourstore.
Buzzer
Thebuzzerisanusefuldevicetoknowthestateofthedrone.Thankstothesoundsthattheautopilotemits,youcanknow
inwhichstatethedroneis(armed,disarmed,ESCcalibration,...)Itcanbeusedalsotogeneratecustomsounds.
Checkmoreinformationinproduct'spageinourstore.
Dongles
DonglescanbepluggedintotheBeagleBoneBlackUSBport.Thisdevicesenablestheuseofdifferentcommunication
networks,suchus:WiFi,3G,4Gandtelemetry.Nowadays,ErleBrainlaunchesan5GhzWifithatisusedtocommunicate
withtheGCS.Wearelookingforwardtosupport/integrateinourproducts3G/4Gnetworks.
Software
ThefollowingsectionswilldescribethesoftwareusedwithinErle-Brain.Briefly:
Linux3.8kernelcompiledwiththePREEMPToption(bestresultswemeasured)
DebianWheezyfilesystem
ROSHydromedusa
APMrunningnativelyinLinux(Copterimagepreinstalled)
mavrosROSpackage(bridgebetweenROSandAPM)
preconfigureddaemonsforlaunchingeverythingautomatically,WiFidonglessupport
QuickstartwithErle-Brain
Checkingtheprocesses
ps-e
YoushouldseeArduCopter.elfandapm4-startup.shrunning.
Changingtoothervehicle
Let'sassumeyouwishtouseErle-Brainwithplane:
cdardupilot/ArduPlane
makeconfigure
makepxf
#thiswillcreateabinarycalledArduPlane.elfat~/build
cp~/ArduPlane.elf~/
Nowyou'llneedtoupdatethestartupscriptstolaunchplaneinsteadofcopter.Todosoeditthe/etc/init.d/apm4startup.shfileandatthebottomofthefilemodifytheArduCopterlaunchcallforanArduPlaneone.
LaunchingROS
roscore&
Nowmakecheckthenodesantopicsavailable:
rosnodelist
rostopiclist
UpdatingErle-Brain'ssoftware
Erle-braincomeswiththelastavailableimageatthetimeofshippinghoweverwearecontinuoslydevelopingnew
capabilitiessoeventuallyyoumightliketoupdateit.
Weexpecttoautomatethissoon.
Updatingtheautopilot
Installingthetools:
sudoapt-getinstallgawkgcc-arm-linux-gnueabihfg++-arm-linux-gnueabihf
Downloadingthecode
gitclonehttp://github.com/erlerobot/ardupilot
Compilingthecode
cdardupilot/ArduCopter
makeconfigure
makepxf
Thecodebinariesshouldbedeployedunder/tmpsocopythebinaryinto/root(ormodify/etc/init.d/apm4-startup.sh
andpointtothebinaryyouwish).
ReflashingeverythingontheeMMC
Generally,updatingtheautopilotwillbeenoughbutifyoumessthingsupweareprovidingawaytoreflashErle-brain.The
easiestwayofdoingitisusingourready-to-flasheMMClastimage.
Downloadtheimageandthecopyitintoa>8GBmicroSDcard:
Linux
Findoutthedrivedevice(e.g./dev/sdb)andcopythecontentoftheimagejustdownloaded:
zcaterlerobot-ubuntu.img.gz|sudoddof=/dev/sdbbs=8M
MacOS
InMacOSyougenerallyneedtounmountthediskbeforedoinganykindofcopying:
diskutillist
diskutilunmountDisk/dev/disk2
ThensimilarlytoLinux:
zcaterlerobot-ubuntu.img.gz|sudoddof=/dev/rdisk1bs=8m
Windows
ToburnanimagetoanSDcardinwindowsyoufirstneedthefollowingtools:
7-ziporotherdecompressorthatcanextractgzippedfile(extensiongz).
ImageWriterforWindowstowritetheimgfiletotheSDCard.
AlaptopwithSDCardreader,oranexternalUSBSDCardreader.
Here’stheproceduretopreparetheSDCard
DownloadUbuntugzippedimagefileforOMAP4boards.
Extractimgfileusing7-zip.
InsertSDCardintoreader.
ExecuteWin32DiskImager.exe–itrequestsadminprivilegesonWindows7.
Selecttheimagefile.
SelectthedevicethatcorrespondstotheSDCardreader.
Writetheimagefile.Thiswilltakeawhile.
EjecttheSDCard.
UpdateErle-Brainfromsource
Forthoseofyouthatwouldlikehackthesystemweareprovidingastep-by-stepguideonhowtoputapreemptibleLinux
kernelinErle-Brainaswellastheautopilot:
TheprocesswillendwithaprebuiltDebianimage,thesamecouldbedonewithaUbuntuone.
GetDebianrunningonErle-Brain
Makingthertkernel
InstallingtheRTkernel
Adjustingtheclock
InstallingandMakingArduPilot
Sources
GetDebianrunningonErle-Brain
GetaDebianimage:
wgethttps://rcn-ee.net/deb/flasher/wheezy/BBB-eMMC-flasher-debian-7.1-2013-10-08.img.xz
VerifyImagewith:
md5sumBBB-eMMC-flasher-debian-7.1-2013-10-08.img.xz
706322a17e5f2251892ad19bec1e5829BBB-eMMC-flasher-debian-7.1-2013-10-08.img.xz
NowyouneedtofindoutwhereyourmicroSDcardisbeingloadedintheFileSystem(inMacOSit'susually
/dev/tty.usbserial-00002114BandinUbuntu/dev/ttyUSB1).ThisisneededinthefollowingsteptocopytheDebian
imagethatwejustdownloadedintothemicroSDcard.Ifyouarenotsureyoucanfollowthesesimplesteps:
BeforepluggingyourSDcardintoyourcomputer,typedf-h.
Thiswilllistthecurrentmounteddrives.NowpluginyourSDcardandtype:df-h
Comparebothoutputsandseewhichisthenewdrive.
WARNING:IFYOUGETTHISWRONGYOUCANWIPEYOURHARDDISK
CopytheDebianimagetothemicroSD(executedasrootonthisform):
xzcatBBB-eMMC-flasher-debian-7.1-2013-10-08.img.xz|ddof=/dev/sdbbs=1M
Waituntiltheflashingisfinished,unplugthemicroSDcardandplugitintoErle.Debianshouldloadandyoushouldbe
abletologinwithuser:rootandpassword:root.
Makingthertkernel
Prerequisites
ARMCrossCompiler
TocompilethelinuxkernelfortheBeagleBoneBlack,youmustfirsthaveanARMcrosscompilerinstalled.Toinstallthe
compilerrun:
apt-getinstallgcc-arm-linux-gnueabi
git
TheBeagleBonepatchesandbuildscriptsarestoredinagitrepository.Installgit:
apt-getinstallgit
Andconfigurewithyouridentity.
gitconfig--globaluser.email"your.email@here.com"
lzopCompression
Thekerneliscompressedusinglzop.Installthelzopparallelfilecompressor:
apt-getinstalllzop
uBootmkimage
ThebootloaderusedontheBeagleBoneblackisu-boot.u-boothasaspecialimageformatcalleduImage.Itincludes
parameterssuchasdescriptions,themachine/architecturetype,compressiontype,loadaddress,checksumsetc.Tomake
theseimages,youneedtohaveamkimagetoolthatcomespartoftheu-Bootdistribution.Downloadu-boot,makeand
installtheu-boottools:
wgetftp://ftp.denx.de/pub/u-boot/u-boot-latest.tar.bz2
tar-xjfu-boot-latest.tar.bz2
cdu-boot-2013.10(looktoseewhatthisiscalled,itmayhavechanged)
maketools
installtools/mkimage/usr/local/bin
CompilingtheLinuxKernelwiththeRTpatch
HerewecompiletheBeagleBoneBlackKernel,andgenerateanuImagefilewiththeDTBblobappendedtothekernelfor
easeofuse.
NOTE:WhenmakingtheLinuxkernelforErle,theEthernetmoduleshouldbedeactivatedtoavoidproblems.Thiscanbe
doneusingthemenuconfigutility.
gitclonegit://github.com/beagleboard/kernel.git
cdkernel
gitcheckout3.8-rt
./patch.sh
cpconfigs/beaglebonekernel/arch/arm/configs/beaglebone_defconfig
wgethttp://arago-project.org/git/projects/?p=am33x-cm3.git\;a=blob_plain\;f=bin/am335x-pm-firmware.bin\;hb=HEAD-Okernel/firmware/am3
cdkernel
makeARCH=armCROSS_COMPILE=arm-linux-gnueabi-beaglebone_defconfig-j4
makeARCH=armCROSS_COMPILE=arm-linux-gnueabi-uImagedtbs-j4
makeARCH=armCROSS_COMPILE=arm-linux-gnueabi-uImage-dtb.am335x-boneblack-j4
Nowwebuildanykernelmodules:
makeARCH=armCROSS_COMPILE=arm-linux-gnueabi-modules-j4
Andifyouhaveyourrootfsready,youcaninstallthem(thisisassumingthatyourmicroSDcardmountstherootfspartition
at/media/rootfs):
makeARCH=armCROSS_COMPILE=arm-linux-gnueabi-INSTALL_MOD_PATH=/media/rootfs
modules_install
InstallingtheRTkernel
Option1:MountingthemicroSDcardinthebuildmachine
FigureoutwhereyourmicroSDwasmounted(mineat/dev/sdf).
ThemicroSDcardshouldalsobemountedunder/mediaasrootfs(thefilesystem)andBOOT(thebootpartition
containingthebootloaderandthekernel).
Updatethemodulesusingthefollowinginstruction:
sudomakeARCH=armCROSS_COMPILE=arm-linux-gnueabi-INSTALL_MOD_PATH=/media/rootfsmodules_install
Verifythatthemoduleshavebeeninstalledproperly:
ls/media/rootfs/lib/modules
3.12.0-rc4-armv7-x33.7.10-x133.8.13-bone283.8.13-rt9-00899-g40bdb63
3.8.13-rt9-00899-g40bdb63verifiesit.
InstallthenewkernelintotheBOOTpartitionofyourmicroSD:
sudocparch/arm/boot/zImage/media/BOOT/zImage
Option2:DirectlyonErle
Oncewe'vefinishedmakingthekernelwecanconnecttherobottotheUSBcableandlogin:
user:root
password:root
Thestepsrequirednowaredescribedhere.
Nomatterwhichmethodyouchoose,verifyyourinstallationafterwards:
root@arm:~#uname-a
Linuxarm3.8.13-rt9-00899-g40bdb63#1SMPPREEMPTWedFeb516:34:58CET2014armv7lGNU/Linux
Adjustingtheclock
Installcpufrequtils:
apt-getinstallcpufrequtils
Thenexecutecpufreq-info:
cpufreq-info
cpufrequtils007:cpufreq-info(C)DominikBrodowski2004-2009
Reporterrorsandbugstocpufreq@vger.kernel.org,please.
analyzingCPU0:
driver:generic_cpu0
CPUswhichrunatthesamehardwarefrequency:0
CPUswhichneedtohavetheirfrequencycoordinatedbysoftware:0
maximumtransitionlatency:300us.
hardwarelimits:275MHz-720MHz
availablefrequencysteps:275MHz,500MHz,600MHz,720MHz
availablecpufreqgovernors:conservative,ondemand,userspace,powersave,performance
currentpolicy:frequencyshouldbewithin275MHzand720MHz.
Thegovernor"ondemand"maydecidewhichspeedtouse
withinthisrange.
currentCPUfrequencyis275MHz(assertedbycalltohardware).
cpufreqstats:275MHz:nan%,500MHz:nan%,600MHz:nan%,720MHz:nan%
Noweditnano/etc/default/cpufrequtilsandaddthefollowing:
#validvalues:userspaceconservativepowersaveondemandperformance
#getthemfromcat/sys/devices/system/cpu/cpu0/cpufreq/scaling_available_governors
GOVERNOR="performance"
Nowreboot(shutdown-r0)andrunagaincpufreq-info:
cpufreq-info
cpufrequtils007:cpufreq-info(C)DominikBrodowski2004-2009
Reporterrorsandbugstocpufreq@vger.kernel.org,please.
analyzingCPU0:
driver:generic_cpu0
CPUswhichrunatthesamehardwarefrequency:0
CPUswhichneedtohavetheirfrequencycoordinatedbysoftware:0
maximumtransitionlatency:300us.
hardwarelimits:275MHz-720MHz
availablefrequencysteps:275MHz,500MHz,600MHz,720MHz
availablecpufreqgovernors:conservative,ondemand,userspace,powersave,performance
currentpolicy:frequencyshouldbewithin275MHzand720MHz.
Thegovernor"performance"maydecidewhichspeedtouse
withinthisrange.
currentCPUfrequencyis720MHz(assertedbycalltohardware).
cpufreqstats:275MHz:nan%,500MHz:nan%,600MHz:nan%,720MHz:nan%
InstallingandMakingArduPilot
Installgit,make,gawk,g++,arduino-coreonyourBBB
apt-getinstallgitmakegawkg++arduino-core
NowgettheArduPilotcode(43.40MB):
gitclonegit://github.com/diydrones/ardupilot.git
ConfiguretheArduCoptercode:
cdardupilot/ArduCopter
makeconfigure
afileconfig.mkshouldhavebeencreatedattheardupilotdirectory(..).Editthisfileaccordingtoyourpreferences.
Then:
makelinux
CompilingArduPilotintherobottakesapproximately5minutes.Aftertheprocesshasfinishedyouwillhaveanew
directory/tmp/ArduCopter.build/containing:
ArduCopter.cppArduCopter.elfArduCopter.maplibraries
ArduCopter.dArduCopter.lstArduCopter.o
fromthisdirectory,runtheArduCopter.elf.
Sources:
ArduPilotfortheBeagleBoneBlack
OperatingSystems
Erle-BrainusestheLinuxkernel,anopensourceUnix-likecomputeroperatingsystemkernel.
TheLinuxkernelisawidelyusedoperatingsystemkernelworld-wide;theLinuxoperatingsystemisbasedonitand
deployedonbothtraditionalcomputersystems,usuallyintheformofLinuxdistributions,andonembeddeddevices
suchasrouters.TheAndroidoperatingsystemfortabletcomputersandsmartphonesisalsobasedontheLinux
kernel.
TheLinuxkernelwasinitiallyconceivedandcreatedin1991byFinnishcomputersciencestudentLinusTorvaldsfor
hispersonalcomputerandwithnocross-platformintentions,buthassinceexpandedtosupportahugearrayof
computerarchitectures,morethananyotheroperatingsystemorkernel.Linuxrapidlyattracteddevelopersand
userswhoadaptedcodefromotherfreesoftwareprojectsforusewiththenewoperatingsystem.
TheLinuxkernelAPI,theapplicationprogramminginterface(API)throughwhichuserprogramsinteractwiththe
kernel,ismeanttobeverystableandtonotbreakuserspaceprograms(someprograms,suchasthosewithGUIs,
relyonotherAPIsaswell).Aspartofthekernel'sfunctionality,devicedriverscontrolthehardware;"mainlined"
devicedriversarealsomeanttobeverystable.However,theinterfacebetweenthekernelandloadablekernel
modules(LKMs),unlikeinmanyotherkernelsandoperatingsystems,isnotmeanttobeverystablebydesign.
Wikipedia
BesidestheLinuxkernel,there'reseveralchoicesforthefilesystem.Belowwedescribesomeofthem:
FileSystems
Debian
DebianisthenameforaLinuxdistributionthatiscomposedprimarilyoffreeandopen-sourcesoftware,mostofwhichis
undertheGNUGeneralPublicLicense,andpackagedbyagroupofindividualsknownastheDebianproject.
AsoneoftheearliestLinuxdistributions,itwasenvisionedthatDebianwastobedevelopedopenlyinthespiritofLinux
andGNU.ThisvisiondrewtheattentionandsupportoftheFreeSoftwareFoundation,whichsponsoredtheprojectforthe
firstpartofitslife.
Aready-to-flyimageforErle-brainwithDebianisavailablehere.
Ubuntu
UbuntuisaDebian-basedLinuxoperatingsystem.ItisbasedonfreesoftwareandnamedaftertheSouthernAfrican
philosophyofubuntu(literally,"human-ness"),whichoftenistranslatedas"humanitytowardsothers"or"thebeliefina
universalbondofsharingthatconnectsallhumanity".
DevelopmentofUbuntuisledbyUK-basedCanonicalLtd.,acompanyownedbySouthAfricanentrepreneurMark
Shuttleworth.CanonicalgeneratesrevenuethroughthesaleoftechnicalsupportandotherservicesrelatedtoUbuntu.The
Ubuntuprojectispubliclycommittedtotheprinciplesofopensourcedevelopment;peopleareencouragedtousefree
software,studyhowitworks,improveuponit,anddistributeit.
Ångström
TheÅngströmdistributionisaLinuxdistributionforavarietyofembeddeddevices.Thedistributionistheresultofa
unificationofdevelopersfromtheOpenZaurus,OpenEmbedded,andOpenSIMpadprojects.
AmongstotheroptionstheuserinterfaceinoneofthereferencebuildsachieveablewithBitBakeistheGPEPalmtop
Environment.Ångströmusesopkgforpackagemanagement.
Android
Androidisamobileoperatingsystem(OS)basedontheLinuxkernelandcurrentlydevelopedbyGoogle.It'suser
interface-oriented,Androidisdesignedprimarilyfortouchscreenmobiledevicessuchassmartphonesandtablet
computers,withspecializeduserinterfacesfortelevisions(AndroidTV),cars(AndroidAuto),andwristwatches(Android
Wear).TheOSusestouchinputsthatlooselycorrespondtoreal-worldactions,likeswiping,tapping,pinching,andreverse
pinchingtomanipulateon-screenobjects,andavirtualkeyboard.Despitebeingprimarilydesignedfortouchscreeninput,it
alsohasbeenusedingameconsoles,digitalcameras,regularPCs(e.g.theHPSlate21)andotherelectronics.
Howaboutrobotics;)?
Doyouneedanspecificdistributionorfilesystem?.Letusknowandwe'llworktogetherwithyoutobringit.
RealTime
ThissectionwillcoverarealtimeanalysisofErleBrain.
SCHED_DEBUGAPMparameter
WithintheAPMparameters,SCHED_DEBUGallowsyoutoseethedebuggingmessagesofthescheduler.Theoptionsofthe
parameterare:
VALUE
MEANING
0
Disabled
2
ShowSlips
3
ShowOverruns
Settingtheparameterto2printsoutthefollowing:
PERF:3/100023319
PERF:5/100021594
PERF:5/100022235
PERF:4/100020590
PERF:6/100022863
PERF:5/100023568
PERF:5/100023275
PERF:4/100021487
PERF:3/100022118
PERF:3/100023658
PERF:4/100023123
PERF:4/100023441
PERF:3/100018775
Thefirstnumberwithinthese"PERF"printoutsshowthenumberofloopsthattooklongerthanexpected(e.g.ifthe
autopilotisrunningat100Hzthenweexpecttaskstobecompletedwithin10ms).
Thesecondnumberrepresentsthemaximumtimeacycletookinmilliseconds.
Threadpriorities
root@beaglebone:~#ps-eouser,pid,nice,pri,rtprio,command
USERPIDNIPRIRTPRIOCOMMAND
root1019-/lib/systemd/systemd
root2019-[kthreadd]
root3019-[ksoftirqd/0]
root5-2039-[kworker/0:0H]
root7-2039-[kworker/u:0H]
root8-13999[migration/0]
root9019-[rcu_preempt]
root10019-[rcu_bh]
root11019-[rcu_sched]
root12-13999[watchdog/0]
root13-2039-[khelper]
root14019-[kdevtmpfs]
root15-2039-[netns]
root17019-[bdi-default]
root18-2039-[kintegrityd]
root19-2039-[kblockd]
root20019-[khubd]
root21-9050[irq/70-44e0b000]
root22019-[kworker/u:1]
root25-9050[irq/7-tps65217]
root28-9050[irq/30-4819c000]
root37-2039-[rpciod]
root39019-[khungtaskd]
root40019-[kswapd0]
root41019-[fsnotify_mark]
root42-2039-[nfsiod]
root43-2039-[crypto]
root46-2039-[pencrypt]
root47-2039-[pdecrypt]
root54-2039-[OMAPUART0]
root56-2039-[kpsmoused]
root57-9050[irq/134-mmc0]
root69-2039-[binder]
root70-2039-[deferwq]
root71019-[kworker/u:2]
root74019-[mmcqd/1]
root75019-[mmcqd/1boot0]
root76019-[mmcqd/1boot1]
root126-2039-[kworker/0:1H]
root175019-[jbd2/mmcblk0p2-]
root176-2039-[ext4-dio-unwrit]
root207019-[kworker/0:2]
root209019-/lib/systemd/systemd-journald
root221019-/sbin/udevd
root305019-/sbin/udevd
root306019-/sbin/udevd
avahi570019-avahi-daemon:running[beaglebone.local]
root577019-/usr/sbin/acpid
101587019-/usr/bin/dbus-daemon--system--address=systemd:
root590019-/bin/bash/etc/init.d/apm4-startup.sh
root594019-/sbin/wpa_supplicant-u-s-O/var/run/wpa_suppl
root595019-/usr/bin/nodeautorun.js
root599019-/lib/systemd/systemd-logind
root603019-/usr/sbin/rsyslogd-n-c5
root629019-/sbin/agettytty138400
root631019-/sbin/agetty-sttyO0115200384009600
avahi653019-avahi-daemon:chroothelper
root661019-[spi1]
root674019-[spi2]
root686-2039-[OMAPUART5]
xrdp691019-/usr/sbin/xrdp
root697-2039-[OMAPUART4]
root774019-/usr/sbin/xrdp-sesman
root795-2039-[OMAPUART2]
root835019-/usr/sbin/cron
root838019-[file-storage]
root851019-/usr/sbin/sshd
root910019-/sbin/agetty-sttyGS0115200384009600
root1020019-/bin/bash/etc/init.d/apm4-startup.sh
root1025-5212./ArduCopter.elf-Audp:192.168.7.1:6000-B/dev
root1047019-sshd:root@pts/0
root1049019--bash
root1076019-sshd:root@pts/1
root1078019--bash
root1109019-[kworker/0:0]
root1110019-stress--cpu8--io8--vm2--vm-bytes128M
root1111019-stress--cpu8--io8--vm2--vm-bytes128M
root1112019-stress--cpu8--io8--vm2--vm-bytes128M
root1113019-stress--cpu8--io8--vm2--vm-bytes128M
root1114019-stress--cpu8--io8--vm2--vm-bytes128M
root1115019-stress--cpu8--io8--vm2--vm-bytes128M
root1116019-stress--cpu8--io8--vm2--vm-bytes128M
root1117019-stress--cpu8--io8--vm2--vm-bytes128M
root1118019-stress--cpu8--io8--vm2--vm-bytes128M
root1119019-stress--cpu8--io8--vm2--vm-bytes128M
root1120019-stress--cpu8--io8--vm2--vm-bytes128M
root1121019-stress--cpu8--io8--vm2--vm-bytes128M
root1122019-stress--cpu8--io8--vm2--vm-bytes128M
root1123019-stress--cpu8--io8--vm2--vm-bytes128M
root1124019-stress--cpu8--io8--vm2--vm-bytes128M
root1125019-stress--cpu8--io8--vm2--vm-bytes128M
root1126019-stress--cpu8--io8--vm2--vm-bytes128M
root1127019-stress--cpu8--io8--vm2--vm-bytes128M
root1128019-stress--cpu8--io8--vm2--vm-bytes128M
root1129019-[flush-179:0]
root1132019-ps-eouser,pid,nice,pri,rtprio,command
Linuxkernel
TheLinuxkernelhasnotbeendesignedtomeetreal-timeconstraintshowevertherearesometechniquesthatcanhelp
tunethekerneltomeetingcertaindeadlines.Fourkernelshavebeenevaluated(someavailablehere):
ThefollowingtestswillbeformedwithavanillakernelcompiledwiththePREEMPToption.Wewillmakeuseofcylictests
codeandwewillalsotorturethekernelwithstresstoobtainthemaximumlatencies.
Torturingthekernel
ForthispurposeweusethestressLinuxcommandlinetool.
Whilerunningtheautopilotandusing:
stress--cpu8--io8--vm2--vm-bytes128M
Wecanseethattheloadofthesystemraisesupto17approximately:
root@beaglebone:~#uptime
03:20:20up14min,3users,loadaverage:17.07,7.86,3.21
Let'spushabitmorelaunchingmorethreadsandiooperations:
stress--cpu64--io64--vm2--vm-bytes128M
Withthis,theuptimecommandreturns:
root@beaglebone:~#uptime
03:27:10up21min,3users,loadaverage:129.08,81.93,36.63
Runningcyclictests
Nowthatwehavetheprocessorstressedweusecyclicteststomeasurethelatencies(us):
root@beaglebone:~#cyclictest-t1-p80-n-i10000-l10000
#/dev/cpu_dma_latencysetto0us
policy:fifo:loadavg:0.470.650.441/981312
T:0(1307)P:80I:10000C:3892Min:19Act:26Avg:67Max:13743
Clockproblems
SometimeswhencompilingorfetchingfilesfromtheInternetyougeterrorssuchas:
error:newlycreatedfileisolderthandistributedfiles!
InordertofixthisissueyouhavetousethefollowingcommandinUbuntu:
sudontpdatepool.ntp.org
(InAngstromyoucanuse/usr/bin/ntpdate-b-s-upool.ntp.org)
GettingstartedwiththePRU
ThisshorttutorialwillexplainhowtogetstartedwiththeProgrammableRealtimeUnitSubSystemusingtheexamples
providedattheBeagleBoardPRUpackage:
FirstwegettheBeagleBoardPRUpackage:
gitclonegit://github.com/beagleboard/am335x_pru_package.git
cdam335x_pru_package/pru_sw/app_loader/interface
makeCROSS_COMPILE=""#we'recompilingrightonthesystem,sononeedtocrosscompile
Nowwecompilepasm:
cd../../utils/pasm_source
./linuxbuild
andfinallysomeexamples:
cd../../example_apps
Herewehavetochangethislinefor:
PASM?=../utils/pasm
Afterthatsmallchange,theexamplesshouldcross-compilenatively:
makeCROSS_COMPILE=""
Then,cdbiny:
modprobeuio_pruss#loadthekernelmodule
echoBB-BONE-PRU-01>/sys/devices/bone_capemgr.8/slots#activatethePRU
./PRU_memAccessPRUDataRam
Theresultshouldlikelike:
INFO:StartingPRU_memAccessPRUDataRamexample.
INFO:Initializingexample.
INFO:Executingexample.
INFO:WaitingforHALTcommand.
INFO:PRUcompletedtransfer.
INFO:Exampleexecutedsuccesfully.
Sources:
Blogpost
am335x_pru_package/#12
am335x_pru_package/#16
TheRobotOperativeSystem(ROS),poweringtheworld's
robots
Concepts
TechnicalOverview
Tutorials
InstallingandConfiguringYourROSEnvironment
NavigatingtheROSFilesystem
CreatingaROSPackage
BuildingaROSPackage
UnderstandingROSNodes
UnderstandingROSTopics
WhatisROS?
TheRobotOperativeSystem(ROS)isanopen-source,meta-operatingsystemforyourrobotmantainedbytheOpen
SourceRoboticsFoundation(OSRF).Itprovidestheservicesyouwouldexpectfromanoperatingsystem,including
hardwareabstraction,low-leveldevicecontrol,implementationofcommonly-usedfunctionality,message-passingbetween
processes,andpackagemanagement.Italsoprovidestoolsandlibrariesforobtaining,building,writing,andrunningcode
acrossmultiplecomputers.ROSissimilarinsomerespectsto'robotframeworks,'suchasPlayer,YARP,Orocos,
CARMEN,Orca,MOOS,andMicrosoftRoboticsStudio.
TheROSruntime"graph"isapeer-to-peernetworkofprocessesthatarelooselycoupledusingtheROScommunication
infrastructure.ROSimplementsseveraldifferentstylesofcommunication,includingsynchronousRPC-stylecommunication
overservices,asynchronousstreamingofdataovertopics,andstorageofdataonaParameterServer.
ROSisnotarealtimeframework,thoughitispossibletointegrateROSwithrealtimecode.ROSalsohasseamless
integrationwiththeOrocosReal-timeToolkit.
Goals
TheprimarygoalofROSistosupportcodereuseinroboticsresearchanddevelopment.ROSisadistributed
frameworkofprocesses(akaNodes)thatenablesexecutablestobeindividuallydesignedandlooselycoupledatruntime.
TheseprocessescanbegroupedintoPackagesandStacks,whichcanbeeasilysharedanddistributed.ROSalso
supportsafederatedsystemofcodeRepositoriesthatenablecollaborationtobedistributedaswell.Thisdesign,fromthe
filesystemleveltothecommunitylevel,enablesindependentdecisionsaboutdevelopmentandimplementation,butallcan
bebroughttogetherwithROSinfrastructuretools.
Insupportofthisprimarygoalofsharingandcollaboration,thereareseveralothergoalsoftheROSframework:
Thin:ROSisdesignedtobeasthinaspossible--wewon'twrapyourmain()--sothatcodewrittenforROScanbe
usedwithotherrobotsoftwareframeworks.AcorollarytothisisthatROSiseasytointegratewithotherrobotsoftware
frameworks:ROShasalreadybeenintegratedwithOpenRAVE,Orocos,andPlayer.
ROS-agnosticlibraries:thepreferreddevelopmentmodelistowriteROS-agnosticlibrarieswithcleanfunctional
interfaces.
Languageindependence:theROSframeworkiseasytoimplementinanymodernprogramminglanguage.Wehave
alreadyimplementeditinPython,C++,andLisp,andwehaveexperimentallibrariesinJavaandLua.
Easytesting:ROShasabuiltinunit/integrationtestframeworkcalledrostestthatmakesiteasytobringupandtear
downtestfixtures.
Scaling:ROSisappropriateforlargeruntimesystemsandforlargedevelopmentprocesses.
OperativeSystems
ROScurrentlyonlyrunsonUnix-basedplatforms.SoftwareforROSisprimarilytestedonUbuntuandMacOSX
systems.
Distributions
ThefollowingdistributionshavebeentestedintherobotErle-Brain.
BydefaulttheimagesprovidedforErle-BraincomewithROSpre-installedandfullyfunctional.
Distro
Releasedate
Poster
Instuctions
ROSHydroMedusa
September4th,
2013
Installation
ROSGroovy
Galapagos
December31,
2012
Installation
License
SomeofthismaterialhasbeentakenfromtheROSwiki.Exceptwhereotherwisenoted,theROSwikiislicensedunder
CreativeCommonsAttribution3.0.
ROS:Concepts
ROShasthreelevelsofconcepts:theFilesystemlevel,theComputationGraphlevel,andtheCommunitylevel.These
levelsandconceptsaresummarizedbelowandlatersectionsgointoeachoftheseingreaterdetail.
Inadditiontothethreelevelsofconcepts,ROSalsodefinestwotypesofnames:PackageResourceNamesandGraph
ResourceNames,alsodiscussedbelow.
Filesystemlevel
ThefilesystemlevelconceptsmainlycoverROSresourcesthatyouencounterondisk,suchas:
Packages:PackagesarethemainunitfororganizingsoftwareinROS.ApackagemaycontainROSruntime
processes(nodes),aROS-dependentlibrary,datasets,configurationfiles,oranythingelsethatisusefullyorganized
together.PackagesarethemostatomicbuilditemandreleaseiteminROS.Meaningthatthemostgranularthingyou
canbuildandreleaseisapackage.
Metapackages:MetapackagesarespecializedPackageswhichonlyservetorepresentagroupofrelatedother
packages.Mostcommonlymetapackagesareusedasabackwardscompatibleplaceholderforconvertedrosbuild
Stacks.
PackageManifests:Manifests(package.xml)providemetadataaboutapackage,includingitsname,version,
description,licenseinformation,dependencies,andothermetainformationlikeexportedpackages.Thepackage.xml
packagemanifestisdefinedinREP-0127.
Repositories:AcollectionofpackageswhichshareacommonVCSsystem.PackageswhichshareaVCSsharethe
sameversionandcanbereleasedtogetherusingthecatkinreleaseautomationtoolbloom.Oftentheserepositories
willmaptoconvertedrosbuildStacks.Repositoriescanalsocontainonlyonepackage.
Message(msg)types:Messagedescriptions,storedinmy_package/msg/MyMessageType.msg,definethedata
structuresformessagessentinROS.
Service(srv)types:Servicedescriptions,storedinmy_package/srv/MyServiceType.srv,definetherequestand
responsedatastructuresforservicesinROS.
ComputationGraphlevel
TheComputationGraphisthepeer-to-peernetworkofROSprocessesthatareprocessingdatatogether.Thebasic
ComputationGraphconceptsofROSarenodes,Master,ParameterServer,messages,services,topics,andbags,allof
whichprovidedatatotheGraphindifferentways.
Theseconceptsareimplementedintheros_commrepository.
Nodes:Nodesareprocessesthatperformcomputation.ROSisdesignedtobemodularatafine-grainedscale;a
robotcontrolsystemusuallycomprisesmanynodes.Forexample,onenodecontrolsalaserrange-finder,onenode
controlsthewheelmotors,onenodeperformslocalization,onenodeperformspathplanning,oneNodeprovidesa
graphicalviewofthesystem,andsoon.AROSnodeiswrittenwiththeuseofaROSclientlibrary,suchasroscppor
rospy.
Master:TheROSMasterprovidesnameregistrationandlookuptotherestoftheComputationGraph.Withoutthe
Master,nodeswouldnotbeabletofindeachother,exchangemessages,orinvokeservices.
ParameterServer:TheParameterServerallowsdatatobestoredbykeyinacentrallocation.Itiscurrentlypartof
theMaster.
Messages:Nodescommunicatewitheachotherbypassingmessages.Amessageissimplyadatastructure,
comprisingtypedfields.Standardprimitivetypes(integer,floatingpoint,boolean,etc.)aresupported,asarearraysof
primitivetypes.Messagescanincludearbitrarilynestedstructuresandarrays(muchlikeCstructs).
Topics:Messagesareroutedviaatransportsystemwithpublish/subscribesemantics.Anodesendsoutamessage
bypublishingittoagiventopic.Thetopicisanamethatisusedtoidentifythecontentofthemessage.Anodethatis
interestedinacertainkindofdatawillsubscribetotheappropriatetopic.Theremaybemultipleconcurrentpublishers
andsubscribersforasingletopic,andasinglenodemaypublishand/orsubscribetomultipletopics.Ingeneral,
publishersandsubscribersarenotawareofeachothers'existence.Theideaistodecoupletheproductionof
informationfromitsconsumption.Logically,onecanthinkofatopicasastronglytypedmessagebus.Eachbushasa
name,andanyonecanconnecttothebustosendorreceivemessagesaslongastheyaretherighttype.
Services:Thepublish/subscribemodelisaveryflexiblecommunicationparadigm,butitsmany-to-many,one-way
transportisnotappropriateforrequest/replyinteractions,whichareoftenrequiredinadistributedsystem.Request/
replyisdoneviaservices,whicharedefinedbyapairofmessagestructures:onefortherequestandoneforthereply.
Aprovidingnodeoffersaserviceunderanameandaclientusestheservicebysendingtherequestmessageand
awaitingthereply.ROSclientlibrariesgenerallypresentthisinteractiontotheprogrammerasifitwerearemote
procedurecall.
Bags:BagsareaformatforsavingandplayingbackROSmessagedata.Bagsareanimportantmechanismfor
storingdata,suchassensordata,thatcanbedifficulttocollectbutisnecessaryfordevelopingandtestingalgorithms.
TheROSMasteractsasanameserviceintheROSComputationGraph.Itstorestopicsandservicesregistration
informationforROSnodes.NodescommunicatewiththeMastertoreporttheirregistrationinformation.Asthesenodes
communicatewiththeMaster,theycanreceiveinformationaboutotherregisterednodesandmakeconnectionsas
appropriate.TheMasterwillalsomakecallbackstothesenodeswhenthisregistrationinformationchanges,whichallows
nodestodynamicallycreateconnectionsasnewnodesarerun.
Nodesconnecttoothernodesdirectly;theMasteronlyprovideslookupinformation,muchlikeaDNSserver.Nodesthat
subscribetoatopicwillrequestconnectionsfromnodesthatpublishthattopic,andwillestablishthatconnectionoveran
agreeduponconnectionprotocol.ThemostcommonprotocolusedinaROSiscalledTCPROS,whichusesstandard
TCP/IPsockets.
Thisarchitectureallowsfordecoupledoperation,wherethenamesaretheprimarymeansbywhichlargerandmore
complexsystemscanbebuilt.NameshaveaveryimportantroleinROS:nodes,topics,services,andparametersallhave
names.EveryROSclientlibrarysupportscommand-lineremappingofnames,whichmeansacompiledprogramcanbe
reconfiguredatruntimetooperateinadifferentComputationGraphtopology.
Forexample,tocontrolaHokuyolaserrange-finder,wecanstartthehokuyo_nodedriver,whichtalkstothelaserand
publishessensor_msgs/LaserScanmessagesonthescantopic.Toprocessthatdata,wemightwriteanodeusing
laser_filtersthatsubscribestomessagesonthescantopic.Aftersubscription,ourfilterwouldautomaticallystartreceiving
messagesfromthelaser.
Notehowthetwosidesaredecoupled.Allthehokuyo_nodenodedoesispublishscans,withoutknowledgeofwhether
anyoneissubscribed.Allthefilterdoesissubscribetoscans,withoutknowledgeofwhetheranyoneispublishingthem.
Thetwonodescanbestarted,killed,andrestarted,inanyorder,withoutinducinganyerrorconditions.
Laterwemightaddanotherlasertoourrobot,soweneedtoreconfigureoursystem.Allweneedtodoisremapthenames
thatareused.Whenwestartourfirsthokuyo_node,wecouldtellitinsteadtoremapscantobase_scan,anddothesame
withourfilternode.Now,bothofthesenodeswillcommunicateusingthebase_scantopicinsteadandnothearmessages
onthescantopic.Thenwecanjuststartanotherhokuyo_nodeforthenewlaserrangefinder.
Communitylevel
TheROSCommunityLevelconceptsareROSresourcesthatenableseparatecommunitiestoexchangesoftwareand
knowledge.Theseresourcesinclude:
Distributions:ROSDistributionsarecollectionsofversionedstacksthatyoucaninstall.Distributionsplayasimilar
roletoLinuxdistributions:theymakeiteasiertoinstallacollectionofsoftware,andtheyalsomaintainconsistent
versionsacrossasetofsoftware.
Repositories:ROSreliesonafederatednetworkofcoderepositories,wheredifferentinstitutionscandevelopand
releasetheirownrobotsoftwarecomponents.
TheROSWiki:TheROScommunityWikiisthemainforumfordocumentinginformationaboutROS.Anyonecansign
upforanaccountandcontributetheirowndocumentation,providecorrectionsorupdates,writetutorials,andmore.
BugTicketSystem:PleaseseeTicketsforinformationaboutfiletickets.
MailingLists:Theros-usersmailinglististheprimarycommunicationchannelaboutnewupdatestoROS,aswellas
aforumtoaskquestionsaboutROSsoftware.
ROSAnswers:AQ&AsiteforansweringyourROS-relatedquestions.
Blog:TheWillowGarageBlogprovidesregularupdates,includingphotosandvideos.
Naming
GraphResourceNames
GraphResourceNamesprovideahierarchicalnamingstructurethatisusedforallresourcesinaROSComputation
Graph,suchasNodes,Parameters,Topics,andServices.ThesenamesareverypowerfulinROSandcentraltohow
largerandmorecomplicatedsystemsarecomposedinROS,soitiscriticaltounderstandhowthesenamesworkandhow
youcanmanipulatethem.
Beforewedescribenamesfurther,herearesomeexamplenames:
/(theglobalnamespace)
/foo
/stanford/robot/name
/wg/node1
GraphResourceNamesareanimportantmechanisminROSforprovidingencapsulation.Eachresourceisdefinedwithin
anamespace,whichitmaysharewithmanyotherresources.Ingeneral,resourcescancreateresourceswithintheir
namespaceandtheycanaccessresourceswithinorabovetheirownnamespace.Connectionscanbemadebetween
resourcesindistinctnamespaces,butthisisgenerallydonebyintegrationcodeabovebothnamespaces.This
encapsulationisolatesdifferentportionsofthesystemfromaccidentallygrabbingthewrongnamedresourceorglobally
hijackingnames.
Namesareresolvedrelatively,soresourcesdonotneedtobeawareofwhichnamespacetheyarein.Thissimplifies
programmingasnodesthatworktogethercanbewrittenasiftheyareallinthetop-levelnamespace.WhentheseNodes
areintegratedintoalargersystem,theycanbepusheddownintoanamespacethatdefinestheircollectionofcode.For
example,onecouldtakeaStanforddemoandaWillowGaragedemoandmergethemintoanewdemowithstanfordand
wgsubgraphs.IfbothdemoshadaNodenamed'camera',theywouldnotconflict.Tools(e.g.graphvisualization)aswell
asparameters(e.g.demo_name)thatneedtobevisibletotheentiregraphcanbecreatedbytop-levelNodes.
ValidNames
Avalidnamehasthefollowingcharacteristics:
1. Firstcharacterisanalphacharacter([a-z|A-Z]),tilde(~)orforwardslash(/)
2. Subsequentcharacterscanbealphanumeric([0-9|a-z|A-Z]),underscores(_),orforwardslashes(/)
Exception:basenames(describedbelow)cannothaveforwardslashes(/)ortildes(~)inthem.
Resolving
TherearefourtypesofGraphResourceNamesinROS:base,relative,global,andprivate,whichhavethefollowing
syntax:
base
relative/name
/global/name
~private/name
Bydefault,resolutionisdonerelativetothenode'snamespace.Forexample,thenode/wg/node1hasthenamespace
/wg,sothenamenode2willresolveto/wg/node2.
Nameswithnonamespacequalifierswhatsoeverarebasenames.Basenamesareactuallyasubclassofrelativenames
andhavethesameresolutionrules.Basenamesaremostfrequentlyusedtoinitializethenodename.
Namesthatstartwitha"/"areglobal--theyareconsideredfullyresolved.Globalnamesshouldbeavoidedasmuchas
possibleastheylimitcodeportability.
Namesthatstartwitha"~"areprivate.Theyconvertthenode'snameintoanamespace.Forexample,node1in
namespace/wg/hastheprivatenamespace/wg/node1.Privatenamesareusefulforpassingparameterstoaspecific
nodeviatheparameterserver.
Herearesomenameresolutionexamples:
Node
Relative(default)
Global
Private
/node1
bar->/bar
/bar->/bar
~bar->/node1/bar
/wg/node2
bar->/wg/bar
/bar->/bar
~bar->/wg/node2/bar
/wg/node3
foo/bar->/wg/foo/bar
/foo/bar->/foo/bar
~foo/bar->/wg/node3/foo/bar
Remapping
AnynamewithinaROSNodecanberemappedwhentheNodeislaunchedatthecommand-line.Formoreinformationon
thisfeature,seeRemappingArguments.
PackageResourceNames
PackageResourceNamesareusedinROSwithFilesystem-Levelconceptstosimplifytheprocessofreferringtofilesand
datatypesondisk.PackageResourceNamesareverysimple:theyarejustthenameofthePackagethattheresourceis
inplusthenameoftheresource.Forexample,thenamestd_msgs/Stringreferstothe"String"messagetypeinthe
"std_msgs"Package.
SomeoftheROS-relatedfilesthatmaybereferredtousingPackageResourceNamesinclude:
Message(msg)types
Service(srv)types
Nodetypes
PackageResourceNamesareverysimilartofilepaths,excepttheyaremuchshorter.ThisisduetotheabilityofROSto
locatePackagesondiskandmakeadditionalassumptionsabouttheircontents.Forexample,Messagedescriptionsare
alwaysstoredinthemsgsubdirectoryandhavethe.msgextension,sostd_msgs/Stringisshorthandfor
path/to/std_msgs/msg/String.msg.Similarly,theNodetypefoo/barisequivalenttosearchingforafilenamedbarin
Packagefoowithexecutablepermissions.
ValidNames
PackageResourceNameshavestrictnamingrulesastheyareoftenusedinauto-generatedcode.Forthisreason,aROS
packagecannothavespecialcharactersotherthananunderscore,andtheymuststartwithanalphabeticalcharacter.A
validnamehasthefollowingcharacteristics:
1. Firstcharacterisanalphacharacter([a-z|A-Z])
2. Subsequentcharacterscanbealphanumeric([0-9|a-z|A-Z]),underscores(_)oraforwardslash(/)
3. Thereisatmostoneforwardslash('/').
TechnicalOverview
ThistechnicaloverviewgoesintogreaterdetailabouttheimplementationofROS.MostROSusersdonotneedtoknow
thesedetails,buttheyareimportantforthosewishingtowritetheirownROSclientlibrariesorthosewishingtointegrate
othersystemswithROS.
ThistechnicaloverviewassumesthatyouarealreadyfamiliarwiththeROSsystemanditsconcepts.Forexample,the
ROSconceptualoverviewprovidesanoverviewoftheComputationGrapharchitecture,includingtheroleoftheROS
Masterandnodes.
Master
TheMasterisimplementedviaXMLRPC,whichisastateless,HTTP-basedprotocol.XMLRPCwaschosenprimarilybecause
itisrelativelylightweight,doesnotrequireastatefulconnection,andhaswideavailabilityinavarietyofprogramming
languages.Forexample,inPython,youcanstartanyPythoninterpreterandbegininteractingwiththeROSMaster:
$python
>>>fromxmlrpclibimportServerProxy
>>>importos
>>>master=ServerProxy(os.environ['ROS_MASTER_URI'])
>>>master.getSystemState('/')
[1,'currentsystemstate',[[['/rosout_agg',['/rosout']]],[['/time',['/rosout']],['/rosout',['/rosout']],['/clock'
TheMasterhasregistrationAPIs,whichallownodestoregisteraspublishers,subscribers,andserviceproviders.The
MasterhasaURIandisstoredintheROS_MASTER_URIenvironmentvariable.ThisURIcorrespondstothehost:portofthe
XML-RPCserveritisrunning.Bydefault,theMasterwillbindtoport11311.
Formoreinformation,includinganAPIlisting,pleaseseeMasterAPI.
ParameterServer
AlthoughtheParameterServerisactuallypartoftheROSMaster,wediscussitsAPIasaseparateentitytoenable
separationinthefuture.
LiketheMasterAPI,theParameterServerAPIisalsoimplementedviaXMLRPC.TheuseofXMLRPCenableseasy
integrationwiththeROSclientlibrariesandalsoprovidesgreatertypeflexibilitywhenstoringandretrievingdata.The
ParameterServercanstorebasicXML-RPCscalars(32-bitintegers,booleans,strings,doubles,iso8601dates),
lists,andbase64-encodedbinarydata.TheParameterServercanalsostoredictionaries(i.e.structs),butthesehavea
specialmeaning.
TheParameterServerusesadictionary-of-dictionaryrepresentationfornamespaces,whereeachdictionary
representsalevelinthenaminghierarchy.Thismeansthateachkeyinadictionaryrepresentsanamespace.Ifavalueisa
dictionary,theParameterServerassumesthatitisstoringthevaluesofanamespace.Forexample,ifyouweretosetthe
parameter/ns1/ns2/footothevalue1,thevalueof/ns1/ns2/wouldbeadictionary{foo:1}andthevalueof/ns1/
wouldbeadictionary{ns2:{foo:1}}.
TheXMLRPCAPImakesitveryeasytointegrateParameterServercallswithoutevenhavingtouseaROSclientlibrary.
AssumingyouhaveaccesstoanXMLRPCclientlibrary,youcanmakecallsdirectly.Forexample:
$python
>>>fromxmlrpclibimportServerProxy
>>>importos
>>>ps=ServerProxy(os.environ['ROS_MASTER_URI'])
>>>ps.getParam('/','/foo')
[-1,'Parameter[/bar]isnotset',0]
>>>ps.setParam('/','/foo','value')
[1,'parameter/fooset',0]
>>>ps.getParam('/','/foo')
[1,'Parameter[/foo]','value']
PleaseseeParameterServerAPIforadetailedAPIlisting.
Node
AROSnodehasseveralAPIs:
1. AslaveAPI.TheslaveAPIisanXMLRPCAPIthathastworoles:receivingcallbacksfromtheMaster,andnegotiating
connectionswithothernodes.ForadetailedAPIlisting,pleaseseeSlaveAPI.
2. Atopictransportprotocolimplementation(seeTCPROSandUDPROS).Nodesestablishtopicconnectionswitheach
otherusinganagreedprotocol.ThemostgeneralprotocolisTCPROS,whichusespersistent,statefulTCP/IPsocket
connections.
3. Acommand-lineAPI.Everynodeshouldsupportcommand-lineremappingarguments,whichenablenameswithina
nodetobeconfiguredatruntime.
EverynodehasaURI,whichcorrespondstothehost:portoftheXMLRPCserveritisrunning.TheXMLRPCserverisnot
usedtotransporttopicorservicedata:instead,itisusedtonegotiateconnectionswithothernodesandalsocommunicate
withtheMaster.ThisserveriscreatedandmanagedwithintheROSclientlibrary,butisgenerallynotvisibletotheclient
libraryuser.TheXMLRPCservermaybeboundtoanyportonthehostwherethenodeisrunning.
TheXMLRPCserverprovidesaSlaveAPI,whichenablesthenodetoreceivepublisherupdatecallsfromtheMaster.
ThesepublisherupdatescontainatopicnameandalistofURIsfornodesthatpublishthattopic.TheXMLRPCserverwill
alsoreceivecallsfromsubscribersthatarelookingtorequesttopicconnections.Ingeneral,whenanodereceivesa
publisherupdate,itwillconnecttoanynewpublishers.
Topictransportsarenegotiatedwhenasubscriberrequestsatopicconnectionusingthepublisher'sXMLRPCserver.The
subscribersendsthepublisheralistofsupportedprotocols.Thepublisherthenselectsaprotocolfromthatlist,suchas
TCPROS,andreturnsthenecessarysettingsforthatprotocol(e.g.anIPaddressandportofaTCP/IPserversocket).The
subscriberthenestablishesaseparateconnectionusingtheprovidedsettings.
TopicTransports
Therearemanywaystoshipdataaroundanetwork,andeachhasadvantagesanddisadvantages,dependinglargelyon
theapplication.TCPiswidelyusedbecauseitprovidesasimple,reliablecommunicationstream.TCPpacketsalways
arriveinorder,andlostpacketsareresentuntiltheyarrive.WhilegreatforwiredEthernetnetworks,thesefeaturesbecome
bugswhentheunderlyingnetworkisalossyWiFiorcellmodemconnection.Inthissituation,UDPismoreappropriate.
Whenmultiplesubscribersaregroupedonasinglesubnet,itmaybemostefficientforthepublishertocommunicatewith
allofthemsimultaneouslyviaUDPbroadcast.
Forthesereasons,ROSdoesnotcommittoasingletransport.GivenapublisherURI,asubscribingnodenegotiatesa
connection,usingtheappropriatetransport,withthatpublisher,viaXMLRPC.Theresultofthenegotiationisthatthetwo
nodesareconnected,withmessagesstreamingfrompublishertosubscriber.
Eachtransporthasitsownprotocolforhowthemessagedataisexchanged.Forexample,usingTCP,thenegotiation
wouldinvolvethepublishergivingthesubscribertheIPaddressandportonwhichtocallconnect.Thesubscriberthen
createsaTCP/IPsockettothespecifiedaddressandport.ThenodesexchangeaConnectionHeaderthatincludes
informationliketheMD5sumofthemessagetypeandthenameofthetopic,andthenthepublisherbeginssending
serializedmessagedatadirectlyoverthesocket.
Toemphasize,nodescommunicatedirectlywitheachother,overanappropriatetransportmechanism.Datadoesnotroute
throughthemaster.DataisnotsentviaXMLRPC.TheXMLRPCsystemisusedonlytonegotiateconnectionsfordata.
Developerlinks:
ROS/TCPROS
ROS/UDPROS
MessageserializationandmsgMD5sums
Messagesareserializedinaverycompactrepresentationthatroughlycorrespondstoac-struct-likeserializationofthe
messagedatainlittleendianformat.Thecompactrepresentationmeansthattwonodescommunicatingmustagreeonthe
layoutofthemessagedata.
Messagetypes(msgs)inROSareversionedusingaspecialMD5sumcalculationofthemsgtext.Ingeneral,client
librariesdonotimplementthisMD5sumcalculationdirectly,insteadstoringthisMD5suminauto-generatedmessage
sourcecodeusingtheoutputofroslib/scripts/gendeps.Forreference,thisMD5sumiscalculatedfromtheMD5textof
the.msgfile,wheretheMD5textisthe.msgtextwith:
commentsremoved
whitespaceremoved
packagenamesofdependenciesremoved
constantsreorderedaheadofotherdeclarations
Inordertocatchchangesthatoccurinembeddedmessagetypes,theMD5textisconcatenatedwiththeMD5textofeach
oftheembeddedtypes,intheorderthattheyappear.
Establishingatopicconnection
Puttingitalltogether,thesequencebywhichtwonodesbeginexchangingmessagesis:
1. Subscriberstarts.Itreadsitscommand-lineremappingargumentstoresolvewhichtopicnameitwilluse.(Remapping
Arguments)
2. Publisherstarts.Itreadsitscommand-lineremappingargumentstoresolvewhichtopicnameitwilluse.(Remapping
Arguments)
3. SubscriberregisterswiththeMaster.(XMLRPC)
4. PublisherregisterswiththeMaster.(XMLRPC)
5. MasterinformsSubscriberofnewPublisher.(XMLRPC)
6. SubscribercontactsPublishertorequestatopicconnectionandnegotiatethetransportprotocol.(XMLRPC)
7. PublishersendsSubscriberthesettingsfortheselectedtransportprotocol.(XMLRPC)
8. SubscriberconnectstoPublisherusingtheselectedtransportprotocol.(TCPROS,etc...)
TheXMLRPCportionofthiswilllooklike:
/subscriber_node→master.registerSubscriber(/subscriber_node,/example_topic,std_msgs/String,http://hostname:1234)
Masterreturnsthattherearenoactivepublishers.
/publisher_node→master.registerPublisher(/publisher_node,/example_topic,std_msgs/String,http://hostname:5678)
Masternoticesthat/subscriber_nodeisinterestedin/example_topic,soitmakesacallbacktothesubscriber
master→subscriber.publisherUpdate(/publisher_node,/example_topic,[http://hostname:5678])
Subscribernoticesthatithasnotconnectedtohttp://hostname:5678yet,soitcontactsittorequestatopic.
subscriber→publisher.requestTopic(/subscriber_node,/example_topic,[[TCPROS]])
PublisherreturnsTCPROSastheselectedprotocol,sosubscribercreatesanewconnectiontothepublishersTCPROS
host:port.
Establishingaserviceconnection
Wehavenotdiscussedservicesasmuchinthisoverview,buttheycanbeviewedasasimplifiedversionoftopics.
Whereastopicscanhavemanypublishers,therecanonlybeasingleserviceprovider.Themostrecentnodetoregister
withthemasterisconsideredthecurrentserviceprovider.Thisallowsforamuchsimplersetupprotocol--infact,aservice
clientdoesnothavetobeaROSnode.
1. ServiceregisterswithMaster
2. ServiceclientlooksupserviceontheMaster
3. ServiceclientcreatesTCP/IPtotheservice
4. ServiceclientandserviceexchangeaConnectionHeader
5. Serviceclientsendsserializedrequestmessage
6. Servicereplieswithserializedresponsemessage.
Ifthelastseveralstepslookfamiliar,itsbecausetheyareanextensionoftheTCPROSprotocol.Infact,rospyandroscpp
bothusethesameTCP/IPserversockettoreceivebothtopicandserviceconnections.
AsthereisnocallbackfromtheMasterwhenanewserviceisregistered,manyclientlibrariesprovidea"waitforservice"
APImethod,thatsimplypollstheMasteruntilaserviceregistrationappears.
InterestinglinksfromArduPilot:
ParameterList
UsingtheCommandLineInterface(CLI)toconfigureArduCopter
APM:CopterCodeOverview
3DRRadios:
Manual
Using3DRRadios
Using3DRradios,plannerversion
MotorSetupforthedifferentconfigurations
Vehicles
TheErle-Braincanbeintegratedindifferentvehiclesthankstoitsmodularity.ThePixHawkFirecapehasbeendesignto
supportAPM(ardupilot)projecttherebyitcanbeusedindifferentvehiclesandconfigurations.
Thisarethevehiclesthatweoffer:
Erle-Copter
Erle-Plane
Erle-Rover
ThisvehiclesareavailablefromtheErleRoboticsstore
Thisspecificsolutionsarenottheonlyones,inthefuture,wearesurethatnewvehicleswillbereleased.
Erle-Copter
Erle-CopterisaLinux-baseddrone.Ifyouwantmoreinformationcheckthevehicle'sspecificbookorourwebpage.
Erle-CoptercanbepurchsasedfromErleRoboticsstore.
Erle-CopterConnections
Inordertoflyproperlythedrone,theconnectionsbetweenErle-Brainanddrone'sESCs,RCreceiverandGPSneedstobe
doneproperly.
Thenextimagesshowshowtodoso:
Erle-Plane
Erle-planeisthefirstLinux-basedplane.Ifmoreinformationiswanted,checkourwebpage
Erle-PlaneConnections
Inordertoflyproperlytheplane,theconnectionsbetweenErle-Brainandplane'sESC,servo,RCreceiverandGPSneeds
tobedoneproperly.
Thenextimagesshowshowtodoso:
Erle-Rover
Erle-roveisthefirstLinux-basedrover,thisvehiclehasbeenspeciallydevelopedforeducationalpurposes.Ifmore
informationiswanted,checkourwebpage
Erle-roverConnections
Inordertoroadproperlytherover,theconnectionsbetweenErle-Brainandrove'sESCs,RCreceiverandGPSneedstobe
doneproperly.
Thenextimagesshowshowtodoso:
Tutorials
Intihssectionyouwillfinddifferenttutorials.Someofthemareintendedtolearnbasicsofprogramminglanguagesusing
Erle-Brain,suchusC++orPython.Others,havebeencreatedinordertolearnLinuxbasics,autopilot,ROS,...
Peripherals
BlinkaLED
BlinkaLEDinC++
Miscelaneous
Backup
CopyimagetomicroSDcard
ExpandingtheFileSystemPartitionontheSD
ResizeyourmicroSDcard
Howtofetserialoverusb
HowtoinstantiateI2Cfromtheuserspace
ROStutorials
InstallingandConfiguringYourROSEnvironment
NavigatingtheROSFilesystem
CreatingaROSPackage
BuildingaROSPackage
UnderstandingROSNodes
UnderstandingROSTopics
OtherGitBooks
Besidesthetutorialsweprovidehere,there'remoreGitBooksavailable:
LearnbasicLinux/Unix
IntroductiontoNetworkinginLinux
LearnPython
LearnPythonNetworking
LearnC++
Peripherals
BlinkaLED,soundaBuzzer,readasensorusingI2C,etc.
Helloworldinrobotics:blinkaLED
Goal
InthistutorialwewilldiveintotheapracticalexamplethatteacheshowtomakeoneoftherobotLEDsblink(thehello
worldinrobotics).
Material
Inordertofollowthetutorialyouwillneed:
TherobotErle
An8GBmicroSDcard(otherscanbeused)withtheUbuntuLinuxDistributionthatweprovide.
a(male)USB-to-miniUSB
Acomputerwithaserialterminalinstalled(youcanusePuTTyinWindowsorminicominUnix-basedOSs)
Tutorial
ErlehasfouruserLEDS,usr0-usr3accesiblethroughtthesysfsinterfaceat/sys/class/leds.Thisinterfaceabstractsthe
LEDsasfileswhichmeansthatwecanactuallycontrolhowtheseLEDsbehavewritinginafile.Cool,isn'tit?
WewillmakeblinkoneoftheonboardUSERLedsthroughsimplebashshellcommands.
First,moveyourselftotheLEDssysfsdir:
cd/sys/class/leds
Ifyoucheckthecontentofthisdirectory(ls)youshouldseesomethinglikethis:
erlerobot:green:usr0@
erlerobot:green:usr1@
erlerobot:green:usr2@
erlerobot:green:usr3@
EachofthisdirectoriesallowsyoutointerfacewithitscorrespondingLEDandhasasetoffilesthatallowyoutoperform
differenttasks.Forexample,let'splaywiththeusr0:
cderlerobot:green:usr0@
ls
Thecontentoflisting(doingls)thisdirectoryshouldbe:
brightnessdevice@max_brightnesspower/subsystem@triggeruevent
Aswesaidbefore,thesefilesallowyoutocontroltheLEDsbywrittingonthembutwecanalsocheckwhattheyaredoing
rightnowbyreadingthem.Simpleblinkingcanbeachievedbywrittingonthebrightnessfile.ToswitchtheLEDusr0on
type:
echo1>brightness
andtoswitchitofftype:
echo0>brightness
Exercise
PutLEDusr0inheartbeatmode:
#writeinhere
#thesolution(assumesthatyou'reattheusr0directory)
echo"heartbeat">trigger
BlinkaLEDinC++
Goal
InthistutorialwewillexplainhowtomakeaprograminC++thatwillswitchonandoffoneoftherobot'sLED.The
programwillbecalledledc++:
ledc++[parameter]
parameterwillbeeitheron,off,flashorstatus.
Material
Inordertofollowthetutorialyouwillneed:
TherobotErle
An8GBmicroSDcard(otherscanbeused)withtheUbuntuLinuxDistributionthatweprovide.
a(male)USB-to-miniUSB
Acomputerwithaserialterminalinstalled(youcanusePuTTyinWindowsorminicominUnix-basedOSs)
Tutorial
Createablankfilecalledledc++.cpp:
touchledc++.cpp
Editthefile(wepersonallylikevimbutfeelfreetolearnanyeditoryoulike)andaddthefollowingcontent:
/**SimpleOn-boardLEDflashingprogram-writtenbyDerekMolloy
fortheee402module
ThisprogramusesUSRLED0andcanbeexecutedinthreeways:
makeLEDon
makeLEDoff
makeLEDflash(flashat100msintervals-on50ms/off50ms)
makeLEDstatus(getthetriggerstatus)
*/
#include<iostream>
#include<fstream>
#include<string>
usingnamespacestd;
#defineLED0_PATH"/sys/class/leds/beaglebone:green:usr0"
voidremoveTrigger(){
//removethetriggerfromtheLED
std::fstreamfs;
fs.open(LED0_PATH"/trigger",std::fstream::out);
fs<<"none";
fs.close();
}
intmain(intargc,char*argv[]){
if(argc!=2){
cout<<"UsageismakeLEDandoneof:on,off,flashorstatus"
<<endl;
cout<<"e.g.makeLEDflash"<<endl;
}
stringcmd(argv[1]);
std::fstreamfs;
cout<<"StartingtheLEDflashprogram"<<endl;
cout<<"TheLEDPathis:"<<LED0_PATH<<endl;
//selectwhetheritison,offorflash
if(cmd=="on"){
removeTrigger();
fs.open(LED0_PATH"/brightness",std::fstream::out);
fs<<"1";
fs.close();
}
elseif(cmd=="off"){
removeTrigger();
fs.open(LED0_PATH"/brightness",std::fstream::out);
fs<<"0";
fs.close();
}
elseif(cmd=="flash"){
fs.open(LED0_PATH"/trigger",std::fstream::out);
fs<<"timer";
fs.close();
fs.open(LED0_PATH"/delay_on",std::fstream::out);
fs<<"50";
fs.close();
fs.open(LED0_PATH"/delay_off",std::fstream::out);
fs<<"50";
fs.close();
}
elseif(cmd=="status"){
//displaythecurrenttriggerdetails
fs.open(LED0_PATH"/trigger",std::fstream::in);
stringline;
while(getline(fs,line))cout<<line;
fs.close();
}
else{
cout<<"Invalidcommand"<<endl;
}
cout<<"FinishedtheLEDflashprogram"<<endl;
return0;
}
Nowcompilethecode:
g++ledc++.cpp-oledc++
Finally,trycallingtheprogramwiththedifferentarguments[on,off,flashorstatus]:
./ledc++on
MISCELANEOUS
Inthissectionyouwillfindsomehelpfulhowtos.
Index
Backup
CopyimagetomicroSDcard
ExpandingtheFileSystemPartitionontheSD
ResizeyourmicroSDcard
Howtofetserialoverusb
HowtoinstantiateI2Cfromtheuserspace
Backup
ThefollowingstepsdescribehowtobackupthecontentofyourmicroSDcardcopyingtheimagetoacompressedfile
namederleimage.img.gz:
ConnectthemicroSDcardtoyourcomputerusingaUSBadapteroraSDone(ifyourcomputersupportsit).
Openaterminalandfigureoutthewhatistheinterfaceunder/dev(Linuxsystems,inMacOSit'susuallymounted
under/Volumes)whereyourmicroSDhasbeenmounted.Let'ssuppose/dev/sdc.
Backupthecontent:
sudoddif=/dev/sdcbs=8M|gzip-c>erleimage.img.gz
(Note:inMacOSthe8Mshouldbesubstitutedby8m.Forexample:sudoddif=/dev/disk1bs=8m|gzip-c>wheezy-rt3.8.13_9-2-14.img.gz)
CopyimagetomicroSDcard
Linux
ThefollowingstepsdescribehowtocopyanimagetothemicroSDcard.Theusuallywillcontainthebootloader,the
LinuxKernelandaFileSystem(eitherÅngströmorUbuntu,othersarepossible)fortherobotErle:
Fetchtheimage.
Assumingtheimagenameiserlerobot-ubuntu.img.gz,andyourmicroSDismountedunder/dev/sdb(usuallyislike
thisinLinux)dothefollowingintheLinuxterminal:
zcaterlerobot-ubuntu.img.gz|sudoddof=/dev/sdbbs=8M
(Note:inMacOSthe8Mshouldbesubstitutedby8m)
InordertomakesurethatallthecontenthasbeencopiedtothemicroSDcard,introduceintheterminal:
sync
EjectyourmicroSDcardandconnectittoErle.Itshouldbereadytofly;).
Alternativelyifyouhaveanimageofthekinderlerobot-ubuntu.tar.xzthenyoushouldusethefollowingcommand:
xz-dkcerlerobot-ubuntu.tar.xz>/dev/sdb
DoitinMacOS
diskutillist
diskutilunmountDisk/dev/disk2
sudoddif=~/Downloads/erle-debian-11-12-14.imgof=/dev/rdisk2bs=4mconv=sync,notrunc,noerror
DoitinWindows
ToburnanimagetoanSDcardinwindowsyoufirstneedthefollowingtools:
7-ziporotherdecompressorthatcanextractgzippedfile(extensiongz).
ImageWriterforWindowstowritetheimgfiletotheSDCard.
AlaptopwithSDCardreader,oranexternalUSBSDCardreader.
Here’stheproceduretopreparetheSDCard
DownloadUbuntugzippedimagefileforOMAP4boards.
Extractimgfileusing7-zip.
InsertSDCardintoreader.
ExecuteWin32DiskImager.exe–itrequestsadminprivilegesonWindows7.
Selecttheimagefile.
SelectthedevicethatcorrespondstotheSDCardreader.
Writetheimagefile.Thiswilltakeawhile.
EjecttheSDCard.
ExpandingtheFileSystemPartitiononthemicroSD
Generallystoragedevicesneedssomestructurethatallowstheoperatingsystemtolocateandcreatenewfiles.Thisis
donebyusingPartitionsandFilesystems.Apartitionisasectionofastoragedevice,whichisformattedwithaFile
System,ontowhichtheoperatingsystemcreatesadirectorystructure.ByexpandingtheFileSystemsinthemicroSDcard
wecanutilizetherestoftheplaceforstoragepurpose.StepsforExpandingtheFileSystemsinExternalmicroSDcard:
InsertthemicroSDcardintherobot,bootandlocateyourpartition.lsblkanddf-hhelpmefigureitout:
$lsblk
NAMEMAJ:MINRMSIZEROTYPEMOUNTPOINT
mmcblk0179:007.5G0disk
|-mmcblk0p1179:1048M0part/boot/uboot
`-mmcblk0p2179:207.4G0part/
$df-h
FilesystemSizeUsedAvailUse%Mountedon
/dev/mmcblk0p27.2G3.3G3.6G49%/
devtmpfs122M4.0K122M1%/dev
none25M200K25M1%/run
none5.0M05.0M0%/run/lock
none122M0122M0%/run/shm
/dev/mmcblk0p148M9.4M39M20%/boot/uboot
TomanageaDiskpartitionswehavetouse`fdiskcommand:
$fdisk/dev/mmcblk0
ThenenterpitshouldthesizeofyourSDcard.DependingonthesizeofyourSDcard,valuesmaychange:
$fdisk/dev/mmcblk0
Command(mforhelp):p
Disk/dev/mmcblk0:8010MB,8010072064bytes
4heads,16sectors/track,244448cylinders,total15644672sectors
Units=sectorsof1*512=512bytes
Sectorsize(logical/physical):512bytes/512bytes
I/Osize(minimum/optimal):512bytes/512bytes
Diskidentifier:0x00000000
DeviceBootStartEndBlocksIdSystem
/dev/mmcblk0p1*204810035149152eW95FAT16(LBA)
/dev/mmcblk0p210035215523839771174483Linux
Enterdcommandtodeleteapartitionandmentionthepartitionnumberas2.Enteringpagainwillshowthatyou
havedeleted/dev/mmcblk0p2
Nowcreateanewpartitionbyenteringnthenpandthen2
n–>newpartition
p–>primary(partitiontype)
2–>partitionnumber
Youcanenterpagaintoseethatthe/dev/mmcblk0p2hasbeenre-appeared.
Ifeverythinggoesfineenterwtocommityourchangesorifyouarefindinganyerror,Ctrl+ztostoptheprocess.
Rebootyoursystem.
$reboot
Afterrebootingyouneedtoexpandthefilesystem.Enterthecommanddf(df–>displaysthetotalspaceandfree
spaceavailableonyoursystem)
Thenenterthefollowingcommandtoexpandthefilesystem.(Ittakesometimetocomplete)
$resize2fs/dev/mmcblk0p2
Aftercompletingtheprocessagaintypedftocheckthespaceavailable.NowyoucanaccessfullspaceofyourSDcard.
Sources:
ExpandingtheFileSystemPartitiononaSDcardinBeagleBoneBlack
Sources:
ExpandingyourUbuntumicroSDpartition
Howtogetserialoverusb
LinuxorMacOS
RecentOSsincludeFTDIdriverbydefaultsogettingaserialconnectionisaseasyas:
ConnecttheminiUSBcable.
Ifeverythingisinstalled,twonewdevicesshouldappearunder/dev:/dev/ttyUSB0and/dev/ttyUSB1.
Launchaserialconnectionagainst/dev/ttyUSB1with:
screen/dev/ttyUSB1115200
Ifeverythingisright(assumingSDcardisnotconnected)youshouldseesome"C"sprintedinthescreen:
CCCCC
(youcanalsouseminicominsteadofscreen).
Windows7
Installthedrivers
BONE_D64.exe(64bits)
BONE_DRV.exe(32bits)
FindingtheErle’svirtualserialport
Start>DevicesandPrinters
LookforBeagleBone/XDS100v2
Double-clickorright-clickit
ClicktheHardwaretab.
Under“DeviceFunctions”isalistportswiththetypeofportinthenextcolumn.
Oneofthemislabeled“USBSerialPort(COMn)”.Inmycaseit’s”USBSerialPort(COM5)”
Obtainingandrunningaterminalprogram
Forthispurposewe'reusingPuTTY.PuTTYisasingle.EXEfile.There’snoinstaller.Icreatedadirectorycalled
C:\ProgramFiles(x86)\putty.
Idownloadedputty.exeandcopiedintothatdirectory.Thenright-clickedputty.exeandchose“PintoStartMenu”tomakeit
easy.
ConfiguretheterminalprogramtouseSSHoverthe(virtual)serialport:
LaunchPuTTY.It’sasimpleprogramanditsmainwindowistitled“PuTTYConfiguration”
MakesureSerialischecked.Aserialportconfigurationdialogappears.
Under“Serialline”enterthenumberoftheCOMportyoudiscoveredpreviously,COM5inthiscase.
Enter115200inthe“Speed”field
ClicktheOpenbutton.
Nowresettherobot(pressingtheresetbutton)andyoushouldsee:
(ifnopropermicroSDcardwasintroduced)"CCCC.."
(ifapropermicroSDcardwasintroduced)thekernelbooting.
HowtoinstantiateI2Cdevicesfromtheuserspace
Ingeneral,thekernelshouldknowwhichI2Cdevicesareconnectedand
whataddressestheyliveat.However,incertaincases,itdoesnot,soa
sysfsinterfacewasaddedtolettheuserprovidetheinformation.This
interfaceismadeof2attributefileswhicharecreatedineveryI2Cbus
directory:new_deviceanddelete_device.Bothfilesarewriteonlyandyou
mustwritetherightparameterstotheminordertoproperlyinstantiate,
respectivelydelete,anI2Cdevice.
Filenew_devicetakes2parameters:thenameoftheI2Cdevice(astring)
andtheaddressoftheI2Cdevice(anumber,typicallyexpressedin
hexadecimalstartingwith0x,butcanalsobeexpressedindecimal.)
Filedelete_devicetakesasingleparameter:theaddressoftheI2C
device.AsnotwodevicescanliveatthesameaddressonagivenI2C
segment,theaddressissufficienttouniquelyidentifythedevicetobe
deleted.
Example:
echoeeprom0x50>/sys/bus/i2c/devices/i2c-3/new_device
Whilethisinterfaceshouldonlybeusedwhenin-kerneldevicedeclaration
can'tbedone,thereisavarietyofcaseswhereitcanbehelpful:
TheI2Cdriverusuallydetectsdevices(method3above)butthebus
segmentyourdevicelivesondoesn'thavetheproperclassbitsetand
thusdetectiondoesn'ttrigger.
TheI2Cdriverusuallydetectsdevices,butyourdevicelivesatan
unexpectedaddress.
TheI2Cdriverusuallydetectsdevices,butyourdeviceisnotdetected,
eitherbecausethedetectionroutineistoostrict,orbecauseyour
deviceisnotofficiallysupportedyetbutyouknowitiscompatible.
Youaredevelopingadriveronatestboard,whereyousolderedtheI2C
deviceyourself.
Thisinterfaceisareplacementfortheforce_*moduleparameterssomeI2C
driversimplement.Beingimplementedini2c-coreratherthanineach
devicedriverindividually,itismuchmoreefficient,andalsohasthe
advantagethatyoudonothavetoreloadthedrivertochangeasetting.
Youcanalsoinstantiatethedevicebeforethedriverisloadedoreven
available,andyoudon'tneedtoknowwhatdriverthedeviceneeds.
TakenfromtheLinuxkerneldocumentation.
Consideringthis,wecouldinstantiateasensor(hih6130)connectedtoi2c-1andwithaddress0x27doing:
echohih61300x27>/sys/bus/i2c/devices/i2c-1/new_device
Afterthat,thedevicewillbeavailableunder/sys/bus/i2c/drivers/hih6130/1-0027.
Toremovethedeviceyoucanuse:
echo0x27>/sys/bus/i2c/devices/i2c-1/delete_device
ROSTutorials
Thefollowingtutorialsprovideastep-by-stepguideusingErle-BrainonhowtodiveintotheRobotOperativeSystem.
TutorialIndex
InstallingandConfiguringYourROSEnvironment
NavigatingtheROSFilesystem
CreatingaROSPackage
BuildingaROSPackage
UnderstandingROSNodes
UnderstandingROSTopics
InstallingandConfiguringYourROSEnvironment
TableofContent
Prerequisites
CreateacatkinWorkspace
ResolvingDependencies
BuildingROS
Sources
UbuntuPrecise(12.04)
RefertoUbuntuARMinstallofROSHydro.
DebianWheezy(7.5)
TherearenoprecompiledbinariesofROSforDebian,whileitseemsthatmostofthedependenciesarebeingpulledinto
themainrepositoriestherearestillsomemissingsocompilingrequiresthatthedependenciesbemadefromsourceas
well.ThefollowingstepsdescribehowtocompileeverythingfromsourcedoingthisforamachinerunningDebianWheezy.
Prerequisites
ConfigureyourDebianrepositoriesSetupyourcomputertoacceptsoftwarefrompackages.ros.org:
sudosh-c'echo"debhttp://packages.ros.org/ros/ubuntuwheezymain">/etc/apt/sources.list.d/ros-latest.list'
Setupyourkeys:
wgethttps://raw.githubusercontent.com/ros/rosdistro/master/ros.key-O-|sudoapt-keyadd-
Refresh:
sudoapt-getupdate
Installbootstrapdependencies:
sudoapt-getinstallpython-rosdeppython-rosinstall-generatorpython-wstoolbuild-essential
NOTE:15thofJuly,2014
Fromtoday,whentryingtoinstallthepackagesiget:
root@beaglebone:~#sudoapt-getinstallpython-rosdeppython-rosinstall-generatorpython-wstoolbuild-essential
Readingpackagelists...Done
Buildingdependencytree
Readingstateinformation...Done
build-essentialisalreadythenewestversion.
Somepackagescouldnotbeinstalled.Thismaymeanthatyouhave
requestedanimpossiblesituationorifyouareusingtheunstable
distributionthatsomerequiredpackageshavenotyetbeencreated
orbeenmovedoutofIncoming.
Thefollowinginformationmayhelptoresolvethesituation:
Thefollowingpackageshaveunmetdependencies:
python-rosdep:Depends:python-catkin-pkgbutitisnotgoingtobeinstalled
Depends:python-rosdistro(>=0.3.0)butitisnotgoingtobeinstalled
python-rosinstall-generator:Depends:python-catkin-pkg(>=0.1.28)butitisnotgoingtobeinstalled
Depends:python-rosdistro(>=0.3.4)butitisnotgoingtobeinstalled
E:Unabletocorrectproblems,youhaveheldbrokenpackages.
NOTE2:15thofJuly,2014Itseemsthatrosdepcannotbeinstalledinnon-ubuntusystemsfromapt-get.Toinstallit,run:
sudopipinstall-Urosdeprosinstall_generatorwstoolrosinstall
NOTE3:4thofOctober,2014nosepackageneddedtobeinsalledbeforerunningsudopipinstall-Urosdep
rosinstall_generatorwstoolrosinstall.
pipinstall-Unose
Nextensurerosdephasbeeninitialized:
sudorosdepinit
rosdepupdate
CreateacatkinWorkspace
Inordertobuildthecorepackages,youwillneedacatkinwork-space.Createonenow:
mkdir~/ros_catkin_ws
cd~/ros_catkin_ws
Nextwewillwanttofetchthecorepackagessowecanbuildthem.Wewillusewstoolforthis.Selectthewstoolcommand
fortheparticularvariantyouwanttoinstall:
AccordingtopreviousversionsofROS:
Desktop-FullInstall:ROS,rqt,rviz,robot-genericlibraries,2D/3Dsimulators,navigationand2D/3Dperception
[desktop-full]
DesktopInstall:ROS,rqt,rviz,androbot-genericlibraries[desktop]
ROS-Comm:(BareBones)ROSpackage,build,andcommunicationlibraries.NoGUItools.[ros_comm]
Wereallyjustneedthecommunicationlayertherebyweareinstallingitbarebones.
rosinstall_generatorros_comm--rosdistrohydro--deps--wet-only>hydro-barebones-full-wet.rosinstall
wstoolinitsrchydro-barebones-full-wet.rosinstall
orforIndigo:
rosinstall_generatorros_comm--rosdistroindigo--deps--wet-only>indigo-barebones-full-wet.rosinstall
wstoolinitsrcindigo-barebones-full-wet.rosinstall
Thiswilladdallofthecatkinorwetpackagesinthegivenvariantandthenfetchthesourcesintothe~/ros_catkin_ws/src
directory.ThecommandwilltakeafewminutestodownloadallofthecoreROSpackagesintothesrcfolder.Ifyouhave
downloadcutsoutrestartitwiththefollowing
wstoolupdate-tsrc
ResolvingDependencies
Beforeyoucanbuildyourcatkinwork-spaceyouneedtomakesurethatyouhavealltherequireddependencies.Weuse
therosdeptoolforthis:
Installingsblcmightbeneededbutatthetimeofwritingit'snotavailable,neitherwaspossibletocompileitfromsource
therebytheLipsdependenciesareremoved.
InordertoremoveLipsdependencies,thefollowingstepsarerequired:
cdsrc
wstoolrmroslisp
rm-rfroslisp
cd..
rosdepinstall--from-pathssrc--ignore-src--rosdistrohydro-y-r--os=debian:wheezy
Thiswilllookatallofthepackagesinthesrcdirectoryandfindallofthedependenciestheyhave.Thenitwillrecursively
installthedependencies.
The--from-pathsoptionindicateswewanttoinstallthedependenciesforanentiredirectoryofpackages,inthiscase
src.The--ignore-srcoptionindicatestorosdepthatitshouldn'ttrytoinstallanyROSpackagesinthesrcfolderfrom
thepackagemanager,wedon'tneedittosincewearebuildingthemourselves.The--rosdistrooptionisrequired
becausewedon'thaveaROSenvironmentsetupyet,sowehavetoindicatetorosdepwhatversionofROSweare
buildingfor.The-yoptionindicatestorosdepthatwedon'twanttobebotheredbytoomanypromptsfromthepackage
manager.Afterawhile(andmaybesomepromptsforyourpassword)rosdepwillfinishinstallingsystemdependenciesand
youcancontinue.The-rflagcausesrosdeptoignoreminorerrors.Thisisnecessarytogetthebasedependencies
installed.Afterthepackagesfollowingthissectionhavebeeninstalleditwouldbeagoodideatorunthiscommandagain
withoutthe-rtoseeifthereareanydependenciesthatyouforgotordidn'thaveinyourbasesystem(i.e.packages
differentfromwhattheauthorofthistutorialhadinstalled).The--osflagwasnecessaryfortheauthorbecauseof
differencesinthewaythatthewheezyversionofdebianstoresversioninformationandwhatrosdepisexpecting.Ifyouare
havingtroublewithanyofthedependenciesrosdepissupposedtoget,makesurethatyouhavethepackagenameright
bygettingtherosdepbase.yamlfromthishttp://docs.ros.org/independent/api/rosdep/html/contributing_rules.html
Onceallofthedependenciesbelowareinstalledyoushouldbeabletorunrosdepinstallexcludingthe-roptionwithout
errorsbymakeingsureallyourdependenciesarelistedinthebase.yaml.
NOTE:16thJuly,2014
root@beaglebone:~/ros_catkin_ws#rosdepinstall--from-pathssrc--ignore-src--rosdistrohydro-y-r--os=debian:wheezy
executingcommand[sudoapt-getinstall-ypython-catkin-pkg]
Readingpackagelists...Done
Buildingdependencytree
Readingstateinformation...Done
Somepackagescouldnotbeinstalled.Thismaymeanthatyouhave
requestedanimpossiblesituationorifyouareusingtheunstable
distributionthatsomerequiredpackageshavenotyetbeencreated
orbeenmovedoutofIncoming.
Thefollowinginformationmayhelptoresolvethesituation:
Thefollowingpackageshaveunmetdependencies:
python-catkin-pkg:Depends:python:any(>=2.7.1-0ubuntu2)butitisnotinstallable
E:Unabletocorrectproblems,youhaveheldbrokenpackages.
executingcommand[sudoapt-getinstall-ypython-rosdep]
Readingpackagelists...Done
Buildingdependencytree
Readingstateinformation...Done
Somepackagescouldnotbeinstalled.Thismaymeanthatyouhave
requestedanimpossiblesituationorifyouareusingtheunstable
distributionthatsomerequiredpackageshavenotyetbeencreated
orbeenmovedoutofIncoming.
Thefollowinginformationmayhelptoresolvethesituation:
Thefollowingpackageshaveunmetdependencies:
python-rosdep:Depends:python-catkin-pkgbutitisnotgoingtobeinstalled
Depends:python-rosdistro(>=0.3.0)butitisnotgoingtobeinstalled
E:Unabletocorrectproblems,youhaveheldbrokenpackages.
ERROR:thefollowingrosdepsfailedtoinstall
apt:command[sudoapt-getinstall-ypython-catkin-pkg]failed
apt:command[sudoapt-getinstall-ypython-rosdep]failed
apt:Failedtodetectsuccessfulinstallationof[python-catkin-pkg]
apt:Failedtodetectsuccessfulinstallationof[python-rosdep]
Seemsliketheproblemkeepson.StillthebuildingstepisperformedandROSworks.
BuildingROS
Finallyrunthebuildandinstallcommand.Toinstallsomewhereotherthanyourhomedirectoryusethe--install-space
option.(Checkcatkin_make_isolatedREP).
cd~/ros_catkin_ws
./src/catkin/bin/catkin_make_isolated--install-DCMAKE_BUILD_TYPE=Release
echo"source~/ros_catkin_ws/install_isolated/setup.bash">>~/.bashrc
Note:YoumightwanttoselectadifferentCMakebuildtype(e.g.RelWithDebInfoorDebug,see
http://cmake.org/cmake/help/v2.8.12/cmake.html#variable:CMAKE_BUILD_TYPE).
Nowyouhavetoreboot.
Sources:
InstallingHydroinDebian
InstallingGroovyinDebian
catkin_make_isolated
NavigatingtheROSFilesystem
TableofContent
QuickOverviewofFilesystemConcepts
FilesystemTools
Usingrospack
Usingroscd
roscdlog
Usingrosls
TabCompletion
Review
Environmentvariables
ResolvingDependencies
BuildingROS
Sources
ThistutorialintroducesROSfilesystemconcepts,andcoversusingtheroscd,rosls,androspackcommandlinetoolsusing
Erleboardthroughalltheprocess.
QuickOverviewofFilesystemConcepts
Packages:PackagesarethesoftwareorganizationunitofROScode.Eachpackagecancontainlibraries,
executables,scripts,orotherartifacts.
Manifest(package.xml):Amanifestisadescriptionofapackage.Itsservestodefinedependenciesbetweenpackages
andtocapturemetainformationaboutthepackagelikeversion,maintainer,license,etc...
FilesystemTools
CodeisspreadacrossmanyROSpackages.Navigatingwithcommand-linetoolssuchaslsandcdcanbeverytedious
whichiswhyROSprovidestoolstohelpyou.
Usingrospack
rospackallowsyoutogetinformationaboutpackages.Inthistutorial,weareonlygoingtocoverthefindoption,which
returnsthepathtopackage.
Usage:
#rospackfind[package_name]
Ifyougetthefollowingerror:
rospackfindroscpp
terminatecalledafterthrowinganinstanceof'std::runtime_error'
what():locale::facet::_S_create_c_localenamenotvalid
Aborted
youcansolveitsettingthefollowingenvironmentvariable:
exportLC_ALL="en_US.UTF-8"
Example:
root@erlerobot:~#rospackfindroscpp
/opt/ros/groovy/share/roscpp
Usingroscd
roscdispartoftherosbashsuite.Itallowsyoutochangedirectory(cd)directlytoapackageorastack.
Usage:
#roscd[locationname[/subdir]]
Runthisexample:
root@erlerobot:~#roscdroscpp
root@erlerobot:/opt/ros/groovy/share/roscpp#pwd
/opt/ros/groovy/share/roscpp
Youcanseethat/opt/ros/groovy/share/roscppisthesamepaththatrospackfindgaveinthepreviousexample.
Notethatroscd,likeotherROStools,willonlyfindROSpackagesthatarewithinthedirectorieslistedinyour
ROS_PACKAGE_PATHenvironmentvariable.ToseewhatisinyourROS_PACKAGE_PATH,type:
root@erlerobot:~#echo$ROS_PACKAGE_PATH
/root/catkin_ws/src:/opt/ros/groovy/share:/opt/ros/groovy/stacks
YouROS_PACKAGE_PATHshouldcontainalistofdirectorieswhereyouhaveROSpackagesseparatedbycolons.
Similarlytootherenvironmentpaths,youcanaddadditionaldirectoriestoyourROS_PACKAGE_PATH,witheachpath
separatedbyacolon':'.
Subdirectories
roscdcanalsomovetoasubdirectoryofapackageorstack.
Try:
root@erlerobot:~#roscdroscpp/cmake
root@erlerobot:/opt/ros/groovy/share/roscpp/cmake#pwd
/opt/ros/groovy/share/roscpp/cmake
roscdlog
roscdlogwilltakeyoutothefolderwhereROSstoreslogfiles.NotethatifyouhavenotrunanyROSprogramsyet,this
willyieldanerrorsayingthatitdoesnotyetexist.
root@erlerobot:~#roscdlog
Noactiveroscore
Ifwelaunchroscoreandthenrunthesamecommandinanotherwindow(orlaunchroscoreinbackgroundappending
&attheend):
root@erlerobot:~/.ros/log#roscore
...loggingto/root/.ros/log/53689ab4-bfe7-11d3-af71-1e658b3e1294/roslaunch-erlerobot-1104.log
Checkinglogdirectoryfordiskusage.Thismaytakeawhile.
PressCtrl-Ctointerrupt
Donecheckinglogfilediskusage.Usageis<1GB.
startedroslaunchserverhttp://erlerobot:55088/
ros_commversion1.9.44
SUMMARY
========
PARAMETERS
*/rosdistro
*/rosversion
NODES
auto-startingnewmaster
process[master]:startedwithpid[1117]
ROS_MASTER_URI=http://erlerobot:11311/
setting/run_idto53689ab4-bfe7-11d3-af71-1e658b3e1294
process[rosout-1]:startedwithpid[1130]
startedcoreservice[/rosout]
root@erlerobot:~#roscdlog
root@erlerobot:~/.ros/log/53689ab4-bfe7-11d3-af71-1e658b3e1294#ls
master.logroslaunch-erlerobot-1104.logrosout-1-stdout.logrosout.log
Usingrosls
`roslsispartoftherosbashsuite.Itallowsyoutolsdirectlyinapackagebynameratherthanbyabsolutepath.
Usage:
#rosls[locationname[/subdir]]
Example:
root@erlerobot:~/catkin_ws/devel#roslscatkin
cmakepackage.xml
TabCompletion
Itcangettedioustotypeoutanentirepackagename.Inthepreviousexample,roscpp_tutorialsisafairlylongname.
Luckily,someROStoolssupportTABcompletion.
Startbytyping:
#roscdcatk<<<nowpushtheTABkey>>>
AfterpushingtheTABkey,thecommandlineshouldfillouttherest:
$roscdcatkin/
ThisworksbecausecatkiniscurrentlytheonlyROSpackagethatstartswithcatkin.
Review
YoumayhavenoticedapatternwiththenamingoftheROStools:
rospack=ros+pack(age)
roscd=ros+cd
rosls=ros+ls
ThisnamingpatternholdsformanyoftheROStools.
Environmentvariables
ROSstronglyrelaysontheshellenvironmentvariables.Makesurethateverythingisconfiguredasexpected:
root@erlerobot:~/catkin_ws/devel#export|grepROS
declare-xROS_DISTRO="groovy"
declare-xROS_ETC_DIR="/opt/ros/groovy/etc/ros"
declare-xROS_MASTER_URI="http://localhost:11311"
declare-xROS_PACKAGE_PATH="/root/catkin_ws/src:/opt/ros/groovy/share:/opt/ros/groovy/stacks"
declare-xROS_ROOT="/opt/ros/groovy/share/ros"
declare-xROS_TEST_RESULTS_DIR="/root/catkin_ws/build/test_results"
NowthatyoucangetaroundinROS,let'screateapackage.
CreatingaROSPackage
Thistutorialcoversusingroscreate-pkgorcatkintocreateanewpackage,androspacktolistpackagedependencies.
Thepackagethatwillbecreatedthroughthistutorialisavailablehere.
TableofContent
WhatmakesupacatkinPackage?
PackagesinacatkinWorkspace
CreatingacatkinPackage
Packagedependencies
First-orderdependencies
Indirectdependencies
CustomizingYourPackage
WhatmakesupacatkinPackage?
Forapackagetobeconsideredacatkinpackageitmustmeetafewrequirements:
Thepackagemustcontainacatkincompliantpackage.xmlfile.Thispackage.xmlfileprovidesmetainformationabout
thepackage.
ThepackagemustcontainaCMakeLists.txtwhichusescatkin.Catkinmetapackagesmusthaveaboilerplate
CMakeLists.txtfile.
Therecanbenomorethanonepackageineachfolder.Thismeansnonestedpackagesnormultiplepackages
sharingthesamedirectory
Thesimplestpossiblepackagemightlooklikethis:
my_package/
CMakeLists.txt
package.xml
PackagesinacatkinWorkspace
Therecommendedmethodofworkingwithcatkinpackagesisusingacatkinworkspace,butyoucanalsobuildcatkin
packagesstandalone.Atrivialworkspacemightlooklikethis:
workspace_folder/--CATKINWORKSPACE
src/--SOURCESPACE
CMakeLists.txt--The'toplevel'CMakefile
package_1/
CMakeLists.txt
package.xml
...
package_n/
CMakeLists.txt
package.xml
...
build/--BUILDSPACE
CATKIN_IGNORE--Keepscatkinfromwalkingthisdirectory
devel/--DEVELOPMENTSPACE(setbyCATKIN_DEVEL_PREFIX)
bin/
etc/
include/
lib/
share/
.catkin
env.bash
setup.bash
setup.sh
...
install/--INSTALLSPACE(setbyCMAKE_INSTALL_PREFIX)
bin/
etc/
include/
lib/
share/
.catkin
env.bash
setup.bash
setup.sh
...
AttheErle-board,thecatkinworkspaceisat/root/catkin_ws.
Ifyouwishtocreateanothercatkinworkspace,followtheCreatingaworkspaceforcatkintutorial.
CreatingacatkinPackage
Thissectionwilldemonstratehowtousethecatkin_create_pkgscripttocreateanewcatkinpackage,andwhatyoucan
dowithitafterithasbeencreated.
FirstchangetothesourcespacedirectoryofthecatkinworkspaceyoucreatedintheCreatingaWorkspaceforcatkin
tutorial:
#YoushouldhavecreatedthisintheCreatingaWorkspaceTutorial
$cd~/catkin_ws/src
Nowusethecatkin_create_pkgscripttocreateanewpackagecalled'erle_beginner_tutorials'whichdependson
std_msgs,roscpp,androspy:
root@erlerobot:~/catkin_ws/src#catkin_create_pkgerle_beginner_tutorialsstd_msgsrospyroscpp
Createdfileerle_beginner_tutorials/package.xml
Createdfileerle_beginner_tutorials/CMakeLists.txt
Createdfoldererle_beginner_tutorials/include
Createdfoldererle_beginner_tutorials/src
Successfullycreatedfilesin/root/catkin_ws/src/erle_beginner_tutorials.Pleaseadjustthevaluesinpackage.xml.
Thiswillcreateaerle_beginner_tutorialsfolderwhichcontainsapackage.xmlandaCMakeLists.txt,whichhavebeen
partiallyfilledoutwiththeinformationyougavecatkin_create_pkg.
root@erlerobot:~/catkin_ws/src#treeerle_beginner_tutorials/
erle_beginner_tutorials/
├──CMakeLists.txt
├──include
├──package.xml
└──src
2directories,2files
catkin_create_pkgrequiresthatyougiveita<package_name>andoptionallyalistofdependenciesonwhichthatpackage
depends:
#Thisisanexample,donottrytorunthis
#catkin_create_pkg<package_name>[depend1][depend2][depend3]
catkin_create_pkgalsohasmoreadvancedfunctionalitieswhichisdescribedincatkin/commands/catkin_create_pkg.
Packagedependencies
First-orderdependencies
Whenusingcatkin_create_pkgearlier,afewpackagedependencieswereprovided.Thesefirst-orderdependenciescan
nowbereviewedwiththerospacktool.
root@erlerobot:~#rospackdepends1erle_beginner_tutorials
roscpp
rospy
std_msgs
Asyoucansee,rospackliststhesamedependenciesthatwereusedasargumentswhenrunningcatkin_create_pkg.
Thesedependenciesforapackagearestoredinthepackage.xmlfile:
root@erlerobot:~#roscderle_beginner_tutorials/
root@erlerobot:~/catkin_ws/src/erle_beginner_tutorials#catpackage.xml
<?xmlversion="1.0"?>
<package>
<name>erle_beginner_tutorials</name>
<version>0.0.0</version>
<description>Theerle_beginner_tutorialspackage</description>
<!--Onemaintainertagrequired,multipleallowed,onepersonpertag-->
<!--Example:-->
<!--<maintaineremail="jane.doe@example.com">JaneDoe</maintainer>-->
<maintaineremail="root@todo.todo">root</maintainer>
<!--Onelicensetagrequired,multipleallowed,onelicensepertag-->
<!--Commonlyusedlicensestrings:-->
<!--BSD,MIT,BoostSoftwareLicense,GPLv2,GPLv3,LGPLv2.1,LGPLv3-->
<license>TODO</license>
<!--Urltagsareoptional,butmutipleareallowed,onepertag-->
<!--Optionalattributetypecanbe:website,bugtracker,orrepository-->
<!--Example:-->
<!--<urltype="website">http://ros.org/wiki/erle_beginner_tutorials</url>-->
<!--Authortagsareoptional,mutipleareallowed,onepertag-->
<!--Authorsdonothavetobemaintianers,butcouldbe-->
<!--Example:-->
<!--<authoremail="jane.doe@example.com">JaneDoe</author>-->
<!--The*_dependtagsareusedtospecifydependencies-->
<!--Dependenciescanbecatkinpackagesorsystemdependencies-->
<!--Examples:-->
<!--Usebuild_dependforpackagesyouneedatcompiletime:-->
<!--<build_depend>message_generation</build_depend>-->
<!--Usebuildtool_dependforbuildtoolpackages:-->
<!--<buildtool_depend>catkin</buildtool_depend>-->
<!--Userun_dependforpackagesyouneedatruntime:-->
<!--<run_depend>message_runtime</run_depend>-->
<!--Usetest_dependforpackagesyouneedonlyfortesting:-->
<!--<test_depend>gtest</test_depend>-->
<buildtool_depend>catkin</buildtool_depend>
<build_depend>roscpp</build_depend>
<build_depend>rospy</build_depend>
<build_depend>std_msgs</build_depend>
<run_depend>roscpp</run_depend>
<run_depend>rospy</run_depend>
<run_depend>std_msgs</run_depend>
<!--Theexporttagcontainsother,unspecified,tags-->
<export>
<!--Youcanspecifythatthispackageisametapackagehere:-->
<!--<metapackage/>-->
<!--Othertoolscanrequestadditionalinformationbeplacedhere-->
</export>
</package>
Indirectdependencies
Inmanycases,adependencywillalsohaveitsowndependencies.Forinstance,rospyhasotherdependencies:
root@erlerobot:~/catkin_ws/src/erle_beginner_tutorials#rospackdepends1rospy
genpy
rosgraph
rosgraph_msgs
roslib
std_msgs
Apackagecanhavequiteafewindirectdependencies.Luckilyrospackcanrecursivelydetermineallnesteddependencies.
root@erlerobot:~/catkin_ws/src/erle_beginner_tutorials#rospackdependserle_beginner_tutorials
cpp_common
rostime
roscpp_traits
roscpp_serialization
genmsg
genpy
message_runtime
rosconsole
std_msgs
rosgraph_msgs
xmlrpcpp
roscpp
rosgraph
catkin
rospack
roslib
rospy
CustomizingYourPackage
Thispartofthetutorialwilllookateachfilegeneratedbycatkin_create_pkganddescribe,linebyline,eachcomponentof
thosefilesandhowyoucancustomizethemforyourpackage.
Customizingthepackage.xml
Thegeneratedpackage.xmlshouldbeinyournewpackage.Nowletsgothroughthenewpackage.xmlandtouchupany
elementsthatneedyourattention.
descriptiontag
Firstupdatethedescriptiontag:
<description>Theerle_beginner_tutorialspackage</description>
Changethedescriptiontoanythingyoulike,butbyconventionthefirstsentenceshouldbeshortwhilecoveringthescope
ofthepackage.Ifitishardtodescribethepackageinasinglesentencethenitmightneedtobebrokenup.
maintainertags
Nextcomesthemaintainertag:
<!--Onemaintainertagrequired,multipleallowed,onepersonpertag-->
<maintaineremail="victor@erlerobot.com">vmayoral</maintainer>
Thisisarequiredandimportanttagforthepackage.xmlbecauseitletsothersknowwhotocontactaboutthepackage.At
leastonemaintainerisrequired,butyoucanhavemanyifyoulike.Thenameofthemaintainergoesintothebodyofthe
tag,butthereisalsoanemailattributethatshouldbefilledout:
licensetags
Nextisthelicensetag,whichisalsorequired:
<!--Onelicensetagrequired,multipleallowed,onelicensepertag-->
<!--Commonlyusedlicensestrings:-->
<!--BSD,MIT,BoostSoftwareLicense,GPLv2,GPLv3,LGPLv2.1,LGPLv3-->
<license>BSD</license>
Youshouldchoosealicenseandfillitinhere.SomecommonopensourcelicensesareBSD,MIT,BoostSoftwareLicense,
GPLv2,GPLv3,LGPLv2.1,andLGPLv3.YoucanreadaboutseveraloftheseattheOpenSourceInitiative.Forthistutorial
we'llusetheBSDlicensebecausetherestofthecoreROScomponentsuseitalready:
WestronglyrecommendtoshareyourcodeunderanOpenSourceInitiativelicense
TheOpenSourceInitiative(OSI)isanon-profitcorporationwithglobalscopeformedtoeducateaboutandadvocateforthe
benefitsofopensourceandtobuildbridgesamongdifferentconstituenciesintheopensourcecommunity.
dependenciestags
Thenextsetoftagsdescribethedependenciesofyourpackage.Thedependenciesaresplitintobuild_depend,
buildtool_depend,run_depend,test_depend.Foramoredetailedexplinationofthesetagsseethedocumentationabout
CatkinDependencies.Sincewepassedstd_msgs,roscpp,androspyasargumentstocatkin_create_pkg,the
dependencieswilllooklikethis:
<!--The*_dependtagsareusedtospecifydependencies-->
<!--Dependenciescanbecatkinpackagesorsystemdependencies-->
<!--Examples:-->
<!--Usebuild_dependforpackagesyouneedatcompiletime:-->
<!--<build_depend>message_generation</build_depend>-->
<!--Usebuildtool_dependforbuildtoolpackages:-->
<!--<buildtool_depend>catkin</buildtool_depend>-->
<!--Userun_dependforpackagesyouneedatruntime:-->
<!--<run_depend>message_runtime</run_depend>-->
<!--Usetest_dependforpackagesyouneedonlyfortesting:-->
<!--<test_depend>gtest</test_depend>-->
<buildtool_depend>catkin</buildtool_depend>
<build_depend>roscpp</build_depend>
<build_depend>rospy</build_depend>
<build_depend>std_msgs</build_depend>
<run_depend>roscpp</run_depend>
<run_depend>rospy</run_depend>
<run_depend>std_msgs</run_depend>
Finalpackage.xml
Asyoucanseethefinalpackage.xml,withoutcommentsandunusedtags,ismuchmoreconcise:
<?xmlversion="1.0"?>
<package>
<name>erle_beginner_tutorials</name>
<version>0.0.1</version>
<description>Theerle_beginner_tutorialspackage</description>
<maintaineremail="victor@erlerobot.com">vmayoral</maintainer>
<license>BSD</license>
<buildtool_depend>catkin</buildtool_depend>
<build_depend>roscpp</build_depend>
<build_depend>rospy</build_depend>
<build_depend>std_msgs</build_depend>
<run_depend>roscpp</run_depend>
<run_depend>rospy</run_depend>
<run_depend>std_msgs</run_depend>
<export>
</export>
</package>
BuildingaROSPackage
Thistutorialcoversthetoolchaintobuildapackage.
TableofContent
BuildingPackages
Usingcatkin_make
BuildingYourPackage
BuildingPackages
Aslongasallofthesystemdependenciesofyourpackageareinstalled,wecannowbuildyournewpackage.
Beforecontinuingremembertosourceyourenvironmentsetupfileifyouhavenotalready(ontheprovidedimages,thisis
doneinthe.bashrcfile).
source/root/catkin_ws/devel/setup.bash
Usingcatkin_make
catkin_makeisacommandlinetoolwhichaddssomeconveniencetothestandardcatkinworkflow.Youcanimaginethat
[catkin_make](http://wiki.ros.org/catkin/commands/catkin_make)combinesthecallstocmakeandmake`inthestandard
CMakeworkflow.
Usage:
#Inacatkinworkspace
$catkin_make[make_targets][-DCMAKE_VARIABLES=...]
ForpeoplewhoareunfamiliarwiththestandardCMakeworkflow,itbreaksdownasfollows:
Note:Ifyourunthebelowcommandsitwillnotwork,asthisisjustanexampleofhowCMakegenerallyworks.
#InaCMakeproject
$mkdirbuild
$cdbuild
$cmake..
$make
$makeinstall#(optionally)
ThisprocessisrunforeachCMakeproject.Incontrastcatkinprojectscanbebuilttogetherinworkspaces.Buildingzeroto
manycatkinpackagesinaworkspacefollowsthisworkflow:
#Inacatkinworkspace
$catkin_make
$catkin_makeinstall#(optionally)
Theabovecommandswillbuildanycatkinprojectsfoundinthesrcfolder.Thisfollowstherecommendationssetby
REP128.Ifyoursourcecodeisinadifferentplace,saymy_srcthenyouwouldcallcatkin_makelikethis:
Note:Ifyourunthebelowcommandsitwillnotwork,asthedirectorymy_srcdoesnotexist.
#Inacatkinworkspace
$catkin_make--sourcemy_src
$catkin_makeinstall--sourcemy_src#(optionally)
Formoreadvancedusesofcatkin_makeseethedocumentation:catkin/commands/catkin_make.
BuildingYourPackage
Youshouldalreadyhaveacatkinworkspaceandanewcatkinpackagecallederle_beginner_tutorialsfromtheprevious
tutorial.Gointothecatkinworkspaceifyouarenotalreadythereandlookinthesrcfolder:
root@erlerobot:~#cd~/catkin_ws/src
root@erlerobot:~/catkin_ws/src#ls
CMakeLists.txterle_beginner_tutorials
`
Wecannowbuildthatpackageusingcatkin_make:
root@erlerobot:~#cd~/catkin_ws
root@erlerobot:~/catkin_ws#catkin_make
Basepath:/root/catkin_ws
Sourcespace:/root/catkin_ws/src
Buildspace:/root/catkin_ws/build
Develspace:/root/catkin_ws/devel
Installspace:/root/catkin_ws/install
####
####Runningcommand:"cmake/root/catkin_ws/src-DCATKIN_DEVEL_PREFIX=/root/catkin_ws/devel-DCMAKE_INSTALL_PREFIX=/root/catkin_ws/ins
####
--UsingCATKIN_DEVEL_PREFIX:/root/catkin_ws/devel
--UsingCMAKE_PREFIX_PATH:/root/catkin_ws/devel;/opt/ros/groovy
--Thisworkspaceoverlays:/root/catkin_ws/devel;/opt/ros/groovy
--Foundgtestsourcesunder'/usr/src/gtest':gtestswillbebuilt
--UsingCATKIN_TEST_RESULTS_DIR:/root/catkin_ws/build/test_results
--catkin0.5.65
--BUILD_SHARED_LIBSison
--~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
--~~traversing1packagesintopologicalorder:
--~~-erle_beginner_tutorials
--~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
--+++processingcatkinpackage:'erle_beginner_tutorials'
--==>add_subdirectory(erle_beginner_tutorials)
--Configuringdone
--Generatingdone
--Buildfileshavebeenwrittento:/root/catkin_ws/build
####
####Runningcommand:"make-j1-l1"in"/root/catkin_ws/build"
####
--UsingCATKIN_DEVEL_PREFIX:/root/catkin_ws/devel
--UsingCMAKE_PREFIX_PATH:/root/catkin_ws/devel;/opt/ros/groovy
--Thisworkspaceoverlays:/root/catkin_ws/devel;/opt/ros/groovy
--Foundgtestsourcesunder'/usr/src/gtest':gtestswillbebuilt
--UsingCATKIN_TEST_RESULTS_DIR:/root/catkin_ws/build/test_results
--catkin0.5.65
--BUILD_SHARED_LIBSison
--~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
--~~traversing1packagesintopologicalorder:
--~~-erle_beginner_tutorials
--~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
--+++processingcatkinpackage:'erle_beginner_tutorials'
--==>add_subdirectory(erle_beginner_tutorials)
--Configuringdone
--Generatingdone
--Buildfileshavebeenwrittento:/root/catkin_ws/build
Notethatcatkin_makefirstdisplayswhatpathsitisusingforeachofthe'spaces'.Thespacesaredescribedinthe
REP128andbydocumentationaboutcatkinworkspacesonthewiki:catkin/workspaces.Theimportantthingtonoticeis
thatbecauseofthesedefaultvaluesseveralfoldershavebeencreatedinyourcatkinworkspace.Takealookwithls:
root@erlerobot:~/catkin_ws#ls
builddevelinstallsrc
Thebuildfolderisthedefaultlocationofthebuildspaceandiswherecmakeandmakearecalledtoconfigureandbuild
yourpackages.Thedevelfolderisthedefaultlocationofthedevelspace,whichiswhereyourexecutablesandlibrariesgo
beforeyouinstallyourpackages.
UnderstandingROSNodes
ThistutorialintroducesROSgraphconceptsanddiscussestheuseofroscore,rosnode,androsruncommandlinetools.
TableofContent
QuickOverviewofGraphConcepts
Nodes
ClientLibraries
roscore
rosnode
rosrun
Review
QuickOverviewofGraphConcepts
Nodes:AnodeisanexecutablethatusesROStocommunicatewithothernodes.
Messages:ROSdatatypeusedwhensubscribingorpublishingtoatopic.
Topics:Nodescanpublishmessagestoatopicaswellassubscribetoatopictoreceivemessages.
Master:NameserviceforROS(i.e.helpsnodesfindeachother)
rosout:ROSequivalentofstdout/stderr
roscore:Master+rosout+parameterserver(parameterserverwillbeintroducedlater)
Nodes
Anodereallyisn'tmuchmorethananexecutablefilewithinaROSpackage.ROSnodesuseaROSclientlibraryto
communicatewithothernodes.NodescanpublishorsubscribetoaTopic.NodescanalsoprovideoruseaService.
ClientLibraries
ROSclientlibrariesallownodeswrittenindifferentprogramminglanguagestocommunicate:
rospy=pythonclientlibrary
roscpp=c++clientlibrary
roscore
roscoreisthefirstthingyoushouldrunwhenusingROS.
Pleaserun:
roscore
...loggingto/root/.ros/log/e8b674a4-bff3-11d3-af73-4ed34f3752c7/roslaunch-erlerobot-2990.log
Checkinglogdirectoryfordiskusage.Thismaytakeawhile.
PressCtrl-Ctointerrupt
Donecheckinglogfilediskusage.Usageis<1GB.
startedroslaunchserverhttp://erlerobot:59324/
ros_commversion1.9.44
SUMMARY
========
PARAMETERS
*/rosdistro
*/rosversion
NODES
auto-startingnewmaster
process[master]:startedwithpid[3003]
ROS_MASTER_URI=http://erlerobot:11311/
setting/run_idtoe8b674a4-bff3-11d3-af73-4ed34f3752c7
process[rosout-1]:startedwithpid[3016]
startedcoreservice[/rosout]
rosnode
rosnodedisplaysinformationabouttheROSnodesthatarecurrentlyrunning.Therosnodelistcommandliststhese
activenodes:
root@erlerobot:~#rosnodelist
/rosout
Thisshowedusthatthereisonlyonenoderunning:rosout.Thisisalwaysrunningasitcollectsandlogsnodes'debugging
output.
Therosnodeinfocommandreturnsinformationaboutaspecificnode.
root@erlerobot:~#rosnodeinfo/rosout
-------------------------------------------------------------------------------Node[/rosout]
Publications:
*/rosout_agg[rosgraph_msgs/Log]
Subscriptions:
*/rosout[unknowntype]
Services:
*/rosout/set_logger_level
*/rosout/get_loggers
contactingnodehttp://erlerobot:49274/...
Pid:3016
Now,let'sseesomemorenodes.Forthis,we'regoingtouserosruntobringupanothernode.
rosrun
rosrunallowsyoutousethepackagenametodirectlyrunanodewithinapackage(withouthavingtoknowthepackage
path).
Usage:
$rosrun[package_name][node_name]
Inanewterminal:
root@erlerobot:~#rosrunautopilot_bridgemavlink.py--device/dev/ttyO4--baudrate115200
Startingmavlink<->ROSinterfaceoverthefollowinglink:
device:/dev/ttyO4
baudrate:115200
WaitingforAPheartbeat
Inanotherterminal:
root@erlerobot:~#rosnodelist
/autopilot
/rosout
OnepowerfulfeatureofROSisthatyoucanreassignNamesfromthecommand-line.
Gobacktotherosrunautopilot_bridgeterminalandusectrl-C(thereseemstobeaproblemwiththisnodesoyoumight
needtoopenanewterminal).Nowlet'sre-runit,butthistimeuseaRemappingArgumenttochangethenode'sname:
root@erlerobot:~#rosrunautopilot_bridgemavlink.py--device/dev/ttyO4--baudrate115200__name:=my_autopilot
Startingmavlink<->ROSinterfaceoverthefollowinglink:
device:/dev/ttyO4
baudrate:115200
WaitingforAPheartbeat
Now,ifwegobackanduserosnodelist:
root@erlerobot:~#rosnodelist
/my_autopilot
/rosout
Let'suseanotherrosnodecommand,ping,totestthatit'sup:
root@erlerobot:~#rosnodepingmy_autopilot
rosnode:nodeis[/my_autopilot]
pinging/my_autopilotwithatimeoutof3.0s
xmlrpcreplyfromhttp://erlerobot:39540/time=15.213966ms
xmlrpcreplyfromhttp://erlerobot:39540/time=13.329983ms
xmlrpcreplyfromhttp://erlerobot:39540/time=12.695074ms
xmlrpcreplyfromhttp://erlerobot:39540/time=13.059974ms
xmlrpcreplyfromhttp://erlerobot:39540/time=12.760997ms
xmlrpcreplyfromhttp://erlerobot:39540/time=12.681007ms
^Cpingaverage:13.290167ms
Review
Whatwascovered:
roscore=ros+core:master(providesnameserviceforROS)+rosout(stdout/stderr)+parameterserver(parameter
serverwillbeintroducedlater)
rosnode=ros+node:ROStooltogetinformationaboutanode.
rosrun=ros+run:runsanodefromagivenpackage.NowthatyouunderstandhowROSnodeswork,let'slookat
howROStopicswork.Also,feelfreetopressCtrl-Ctostopturtlesim_node.
UnderstandingROSTopics
ThistutorialintroducesROStopicsaswellasusingtherostopiccommandlinetools.
Beforewemoveforward,let'sstartbymakingsurethatwehaveroscorerunning,inanewterminal:
$roscore
Ifyouleftroscorerunningfromthelasttutorial,youmaygettheerrormessage:
roscorecannotrunasanotherroscore/masterisalreadyrunning.
Pleasekillotherroscore/masterprocessesbeforerelaunching
Thisisfine.Onlyoneroscoreneedstoberunning.
ROSTopics
TherostopictoolallowsyoutogetinformationaboutROStopics.
Youcanusethehelpoptiontogettheavailablesub-commandsforrostopic
root@erlerobot:~#rostopic-h
rostopicisacommand-linetoolforprintinginformationaboutROSTopics.
Commands:
rostopicbwdisplaybandwidthusedbytopic
rostopicechoprintmessagestoscreen
rostopicfindfindtopicsbytype
rostopichzdisplaypublishingrateoftopic
rostopicinfoprintinformationaboutactivetopic
rostopiclistlistactivetopics
rostopicpubpublishdatatotopic
rostopictypeprinttopictype
Typerostopic<command>-hformoredetailedusage,e.g.'rostopicecho-h'
Contactinformation
Web:http://erlerobotics.com
Email:contact@erlerobot.com
Legalnote
Thismaterialcorrespondswithaninnovativeproductthatmayincludeunfinishedcontent.Assuch,thesedesignmaterials
mayormaynotbesuitableforyourpurposes.Ifused,thedesignmaterialbecomesyourresponsibilityastowhetherornot
itmeetsyourspecificneedsoryourspecificapplicationsandmayrequirechangestomeetyourrequirements.
Theuserassumesallresponsibilityandliabilityforproperandsafehandlingofthegoods.Further,theuserindemnifies
Supplierfromallclaimsarisingfromthehandlingoruseofthegoods.
License
ThecontenthereislicensedunderCC-SA-NC3.0.