Computational Complexity and Approximation Methods of
Most Relevant Explanation
Heejin Lim & Changhe Yuan
Department of Computer Science and Engineering
Mississippi State University
Mississippi State, MS 39762
hl204@msstate.edu & cyuan@cse.msstate.edu
Abstract
Most Relevant Explanation (MRE) is a new approach to
generating explanations for given evidence in Bayesian
networks. MRE has a solution space containing all the
partial instantiations of target variables and is extremely
hard to solve. We show in this paper that the decision problem of MRE is N P P P -complete. For large
Bayesian networks, approximate methods may be the
only feasible solutions. We observe that the solution
space of MRE has a special lattice structure that connects all the potential solutions together. The connectivity motivates us to develop several efficient local search
methods for solving MRE. Empirical results show that
these methods can efficiently find the optimal MRE solutions for majority of the test cases in our experiments.
1
Introduction
Most Relevant Explanation (MRE) is a new approach to
generating explanations for given evidence in Bayesian networks (Yuan & Lu 2008; Yuan et al. 2009). Its main idea
is to traverse a trans-dimensional space that contains all the
partial instantiations of the target variables and find an instantiation that maximizes a relevance measure called generalized Bayes factor (Fitelson 2007). The approach was
shown theoretically and empirically in (Yuan et al. 2009) to
be able to find precise and concise explanations. Readers are
referred to (Yuan et al. 2009) for the theoretical properties
and empirical results.
The solution space of MRE is huge for large Bayesian
networks. MAP only considers the full instantiations of the
target variables and was already shown to be an N P P P complete problem (Park 2002). MRE has an even larger solution space and is believed to be extremely difficult to solve.
We show in this paper that the decision problem of MRE is
also N P P P -complete. Therefore approximation methods
may be the only feasible solutions for large Bayesian networks. A method based on Reversible Jump MCMC (Green
1995) and simulated annealing was proposed to solve MRE
approximately in (Yuan & Lu 2008). Although theoretically
this algorithm will converge to an optimal solution given
enough time, the amount of time needed is unpredictable.
The algorithm can still be inefficient on some networks.
c 2009, Lim and Yuan. All rights reserved.
Copyright ⃝
In this paper, we develop several local search methods for
solving MRE. Local methods have been shown to be effective in solving MAP problems in Bayesian networks (Park &
Darwiche 2001). We further observe that the solution space
of MRE has a special lattice structure that connects all the
potential solutions, which motivates us to design several local search strategies to find high-quality solutions efficiently.
Empirical results show that these local search methods are
not only efficient but also able to find the optimal solutions
for most of the test cases in our experiments.
The remainder of the paper is structured as follows. Section 2 reviews the formulation of Most Relevant Explanation. Section 3 proves that the decision problem of
MRE is N P P P -complete. Section 4 develops several local
search methods for solving MRE, including forward search,
forward-backward search, and partial exhaustive search. Finally, Section 5 presents the empirical evaluations of these
local MRE methods on a set of benchmark Bayesian networks.
2
Most Relevant Explanation
Most Relevant Explanation is a method developed for
Bayesian networks to automatically identify the most relevant target variables in explaining given evidence (Yuan &
Lu 2008; Yuan et al. 2009). First, explanation in Bayesian
networks is formally defined as follows.
Definition 1. Given a set of target variables X in a Bayesian
network and evidence e on the remaining variables, an explanation x1:k for the evidence is a k-variate partial instantiation of the target variables, i.e., X1:k ⊆ X and X1:k ̸= ∅.
Most Relevant Explanation (MRE) is defined as follows.
Definition 2. Let X be a set of target variables, and e be
the evidence on the remaining variables in a Bayesian network. Most Relevant Explanation is the problem of finding an explanation x1:k that has the maximum Generalized
Bayes Factor score GBF (x1:k ; e), i.e.,
M RE(X, e) ≡ arg maxx1:k ,X1:k ⊆X,X1:k ̸=∅ GBF (x1:k ; e) ,
(1)
where GBF is defined as
GBF (x1:k ; e) ≡
P (e|x1:k )
.
P (e|x1:k )
(2)
3 Computational Complexity of MRE
This section proves the computational complexity of
MRE. We first introduce a new decision problem called
EP-MAJSAT (exists partial MAJSAT), which generalizes the N P P P -complete E-MAJSAT problem (exists
MAJSAT) (Littman, Goldsmith, & Mundhenk 1998). Recall that E-MAJSAT is defined as follows: given a Boolean
formula over n variables X1 , ..., Xn , we need to find out
whether there is an instantiation of the first k variables
X1 , ..., Xk such that the majority of the assignments to
Xk+1 , ..., Xn satisfy the Boolean expression. EP-MAJSAT
is defined analogously except that we want to find out
whether there is a partial instantiation y1 , ..., yi with a given
cardinality i (i ≤ k) of X1 , ..., Xk such that the majority of
the assignments to the remaining variables {X1 , ..., Xn } \
{Y1 , ..., Yi } satisfy the Boolean expression.
If i = k = n, EP-MAJSAT becomes the classic
N P -complete Boolean satisfiability problem, which asks
whether there exists an assignment to all the variables that
makes the formula true (Cook 1971). If i = 0, it becomes
the PP-complete MAJSAT problem, which asks whether
the majority of the complete assignments make the formula
true (Gill 1977). If i = k, this is simply the E-MAJSAT
problem. Otherwise for the general case when 1 ≤ i ≤ k,
EP-MAJSAT involves first an NP-type task to pick a partial
instantiation of X1 , ..., Xk and then a PP-type task to see
whether the majority of assignments to the remaining variables make the Boolean formula true. The following theorem shows that EP-MAJSAT is N P P P -complete.
Theorem 1. EP-MAJSAT is N P P P -complete.
Proof. Membership in N P P P is clear. We can first guess a
partial instantiation of X1 , ..., Xk using a nondeterministic
machine in polynomial time. For each such instantiation,
we can query a PP MAJSAT oracle to see if the majority
of the assignments to all the remaining variables make the
Boolean formula true.
To prove hardness, we reduce E-MAJSAT to
EP-MAJSAT. The reduction is rather trivial. For a
Boolean formula over n variables X1 , ..., Xn , E-MAJSAT
over X1 , ..., Xk is satisfied if and only if EP-MAJSAT over
the same set of variables (cardinality i is equal to k) is
satisfied.
The solution space of MRE consists of all the partial instantiations of the target variables. Intuitively, MRE has a
solution space much larger than MAP. Let there be n target
variables, each with d states. The size of the solution space
for MAP is dn . The size of the solution space of MRE is
(d + 1)n − 1 because
n
∑
C(n, k) ∗ d = (d + 1) − 1,
k
n
(3)
k=1
where C(, ) is the combination function. So MRE has a
solution space with a size equal to that of a MAP problem in an augmented space. It was proven in (Park 2002;
Park & Darwiche 2004) that MAP is N P P P -complete by
reducing from E-MAJSAT. We prove in this section that
MRE has the same computational complexity as MAP by
reducing from EP-MAJSAT. We consider the following decision problem of MRE in proving its computational complexity. The decision problem asks whether there is a partial
instantiation y1 , ..., yi with given cardinality i of variables
X1 , ..., Xn such that GBF (y1:i ; e) > (2i − 1)/(2i+1 P (e) −
1), where P (e) is the probability of evidence e.
Theorem 2. MRE is N P P P -complete.
Proof. Membership in N P P P is clear. Computing the
probability of any instantiation of a set of variables given
evidence on the other variables is shown to be PPcomplete (Littman, Majercik, & Pitassi 2001). So we can
first guess a partial instantiation using a nondeterministic
machine in polynomial time. We then query a PP-oracle
to get the prior and posterior probabilities of the partial instantiation, which can be used to compute its GBF score and
check whether the score is greater than the given threshold.
To show hardness, we reduce EP-MAJSAT to MRE. For
any Boolean formula over n variables X1 , ..., Xn , we create
a Bayesian network using a method similar to the one presented in (Park 2002; Park & Darwiche 2004). We create a
root node with uniform prior probability in the Bayesian network for each boolean variable Xi . We also create a variable
for each boolean operator with parent variables corresponding to the operands and with a CPT encoding the truth table
of the operator. By doing so, we obtain a variable in the
Bayesian network that corresponds to the truth value of the
whole Boolean formula. We denote it as V . We set V = T
as the evidence to the Bayesian network. The creation of the
Bayesian network can be done in polynomial time.
We claim that a solution y1 , ..., yi of M RE(X1:n ; e) on
the Bayesian network has a GBF score greater than (2i −
1)/(2i+1 P (e) − 1) if and only if the the same instantiation
makes EP-MAJSAT satisfied in the original problem. P (e)
is the probability of V = T and can be obtained from a
PP-oracle.
First, let y1 , ..., yi be the MRE solution on the Bayesian
network and GBF (y1:i ; e) > (2i − 1)/(2i+1 P (e) − 1).
Since for any y1 , ..., yi , its prior probability is P (y1:i ) =
1/2i due to the uniform priors on all the variables Xi:n , we
have
GBF (y1:i ; e)
P (e|y1:i )
P (e|y1:i )
P (y1:i |e)(1 − P (y1:i ))
⇔
P (y1:i )(1 − P (y1:i |e))
⇔
⇔
>
>
>
P (y1:i |e)(1 − P (y1:i ))
P (y1:i )(1 − P (y1:i |e))
>
⇔ P (y1:i |e)
>
⇔ P (y1:i , e)
>
2i − 1
2i+1 P (e) − 1
2i − 1
2i+1 P (e) − 1
2i − 1
2i+1 P (e) − 1
1
1
2i+1 P (e) (1 − 2i )
1
2i (1
−
1
2i+1 P (e) )
1
2i+1 P (e)
1
.
2i+1
a
ab
aB
abc
A
ac
abC
aC
aBc
b
Ab
B
AB
aBC
Ac
Abc
c
AC
C
bc
AbC
bC
ABc
Bc
BC
ABC
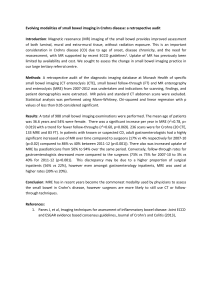
Figure 1: Solution space of Most Relevant Explanation
Then y1:i must make EP-MAJSAT satisfied, because
∑
P (y1:i , e) =
P (X1:n , e)
{X1:n }\{Y1:i }
=
in large Bayesian networks. In this paper, we adapt local search methods such as forward and backward search
to solve MRE.
The solution space of MRE has an interesting structure
similar to the graph in Figure 1 for three binary variables.
Each node in the graph is a potential solution, and the links
show the connectivity between the solutions. Two solutions
are connected if they differ only by one variable. Either the
state of the variable is different, or one solution has one more
variable than the other. The solutions range from singletons
to full configurations of the target variables. The forward
and backward search methods we are to develop essentially
search the graph either top-down or bottom-up.
(#satisf ied assignments)/2n
= percentage satisf ied/2i .
Second, if there exists a partial instantiation y1 , ..., yi
that makes EP-MAJSAT satisfied, the number of satisfying assignments must be greater than 2n−i . The probability P (y1:i , e) on the Bayesian network must be greater
than 1/2i+1 . It follows that GBF (y1:i ; e) > (2i −
1)/(2i+1 P (e) − 1).
4 Local Search Methods for Solving MRE
MRE traverses a solution space that contains all the partial instantiations of a set of target variables to find an optimal solution. An exhaustive search algorithm is impractical
for large Bayesian network models with many target variables. More efficient methods, including approximate methods, need to be developed to handle these large domains.
We develop several efficient local search methods for
solving MRE. These methods are motivated from the similarity between MRE and feature selection problem (Molina,
Belanche, & Nebot 2002) and our observation on the structure of the solution space.
The goal of feature selection is to choose a small subset
of features of a dataset to preserve as much predictive power
as possible from all the features. Feature selection enables a
more compact and robust model to be built, plus it can make
the resulting model more intuitive. Since it is often impractical to search all the subsets and find the optimal subset,
many feature selection methods are approximation methods,
such as the forward and backward search methods (Molina,
Belanche, & Nebot 2002). These methods typically start
with a candidate subset of features and greedily improves
the subset by incorporating the best new feature or deleting
the worst existing feature until some stopping criterion is
achieved.
In MRE, we need to select not only a subset of variables
but also their states to maximize the GBF score. The solution space of MRE is much larger than feature selection.
For example, in selecting from a total of n binary variables, the∑
number of possible combinations for feature sen
n
lection
is
k=1 C(n, k) or 2 − 1. However for MRE, it is
∑n
k
n
k=1 C(n, k)2 or 3 − 1. Therefore MRE has a much
larger solution space given the same number of variables
than feature selection. The development of local search
methods is even more critical for solving MRE problems
4.1 Forward Search
In forward search, we first generates one or more initial starting solutions. Then for each starting solution, we greedily
improve the solution by either adding an additional variable
with some state or changing the state of one variable in the
current solution. Essentially, we are searching the graph in
Figure 1 top down. The forward search algorithm is outlined
in Algorithm 1.
Algorithm 1 The forward search algorithm
Input: Bayesian network B with a set of target variables X,
and a set of evidence variables E
Output: An MRE solution over X
1: Initialize the starting solution set i with an initialization
rule
2: Initialize the current best solution xbest = ∅
3: for each starting solution s in i do
4:
x=s
5:
i = i-{s}
6:
repeat
7:
xlocbest = x
8:
Find the neighboring solution set n of x by ei-
9:
10:
11:
12:
13:
14:
15:
16:
17:
18:
19:
20:
21:
22:
ther adding one target variable with any state or
changing one variable to another state
for each solution xn in n do
if GBF(xn ) > GBF(xlocbest ) then
xlocbest = xn
end if
end for
if GBF(xlocbest ) > GBF(x) then
x = xlocbest
end if
until GBF(x) stops increasing
if GBF(x) > GBF(xbest ) then
xbest = x
end if
end for
return xbest
Our forward search algorithm has two rules for initializing the staring solution set. The initialization rules are
shown in Figure 2.
Figure 2: Two initialization rules of the forward search.
ize the backward search. Due to the intrinsic pruning capability of MRE (Yuan et al. 2009), forward search can already
find the global optimal MRE solutions for many cases. For
those cases that forward search that only finds sub-optimal
solutions, the results are typically not too far off either. We
observe that many of them have a couple of more target variables than the optimal solution or the number of target variables is same but some states of the target variables are different. Applying variable deletion and/or state changing is
likely to improve these solutions and may even lead to optimal solutions. Therefore, we propose to apply backward
search on top of forward search results to further improve
the results. The resulting algorithm is a mixed algorithm of
the forward search and the backward search, which we call
the forward-backward search.
Empty Instantiation Initialization We start the forward
search algorithm from an empty instantiation and greedily
improve the solution through the search steps.
Algorithm 2 The backward search algorithm
Input: Bayesian network B with a set of target variables X,
and a set of evidence variables E
Output: An MRE solution over X
1: s = ∅
2: i = {s}
3: return i
(a) Empty instantiation initialization
1:
2:
3:
4:
5:
6:
i=∅
for j = 1 to n do
s = {Xj = arg maxxj P (Xj = xj |E)}
i = i ∪ {s}
end for
return i
(b) Marginal pivot initialization
Marginal Pivot Initialization When using the empty instantiation initialization, we observe that some cases that
fall into local maxima are caused by wrong guidance of the
target variable added in the very first step by the forward
search. Because one misguided greedy step can cause the
entire solution to be wrong, we try to avoid this problem
by setting each single target variable to its most likely state,
called a pivot, as a set of starting points of the search algorithm. The pivots can be obtained using any belief updating algorithm, such as the jointree algorithm (Lauritzen
& Spiegelhalter 1988). There are n pivoted starting points
(n is the number of target variables in the network) in this
initialization rule.
4.2 Forward-Backward Search
We also develop several backward search algorithms for
MRE. A backward search greedily improve a candidate solution by changing the state of one target variable or deleting
an existing variable from the current solution at each step
until no further improvement can be achieved. We search
the graph in Figure 1 bottom up in a backward search. The
backward search algorithm is given in Algorithm 2.
Starting solutions of the backward search can be full
configurations of the target variables generated by combining the marginal pivots, selecting random states, or solving
MAP. The first two approaches can generate full instantiations with minimal cost. However, they often generate inconsistent instantiations because they do not consider the
interdependence between the target variables. These inconsistent starting points typically lead backward search algorithms to low-quality results. We also tried MAP solution
as a starting point of the backward search algorithm because
MAP finds the most probable instantiation of target variables
given evidence. However, MAP itself has a high computational complexity. It is shown to be a N P P P -complete (Park
2002) problem. Using MAP as an initialization method is
not practical.
Instead, we use the results of the forward search to initial-
Initialize the starting solution set i with an initialization
rule
Initialize the current best solution xbest = ∅
for each starting solution s in i do
x=s
i = i-{s}
repeat
xlocbest = x
Find the neighboring solution set n of x by deleting
one existing variable or changing one variable to another state
for each solution xn in n do
if GBF(xn ) > GBF(xlocbest ) then
xlocbest = xn
end if
end for
if GBF(xlocbest ) > GBF(x) then
x = xlocbest
end if
until GBF(x) stops increasing
if GBF(x) > GBF(xbest ) then
xbest = x
end if
end for
return xbest
Because the forward search with two initialization rules
generate two starting points of the backward search, the
forward-backward search algorithm also has two versions.
4.3 Partial Exhaustive Search
As we mention in the previous subsection, even though the
results of forward search are sub-optimal, they are often not
off by too much. Many of them have a couple of more target
variables than the optimal solution or the number of target
variables is same but the states of some target variables are
different. Backward search is one way to improve the re-
Network
Targets
Size of solution space
Alarm
12
944,783
Carpo
10
59,048
Hepar
9
34,991
Insurance
5
1,199
Munin
4
599
Metrics
Accuracy
Efficiency
Accuracy
Efficiency
Accuracy
Efficiency
Accuracy
Efficiency
Accuracy
Efficiency
Fe
0.9400
0.0001
0.9200
0.0009
0.8250
0.0017
1.0000
0.0325
0.8950
0.0785
Fmp
0.9750
0.0015
1.0000
0.0128
0.9650
0.0192
1.0000
0.1776
0.8800
0.2304
FBe
0.9500
0.0001
0.9200
0.0010
0.8350
0.0018
1.0000
0.0367
0.9000
0.0935
FBmp
0.9950
0.0015
1.0000
0.0129
0.9650
0.0194
1.0000
0.1827
0.9650
0.2487
EXe
0.9500
0.0044
0.9200
0.0113
0.8600
0.0183
1.0000
0.0634
0.9150
0.3272
EXmp
0.9950
0.0079
1.0000
0.0361
0.9850
0.0466
1.0000
0.2093
0.9900
0.4992
Table 1: Performance of the forward search algorithm (F), the forward-backward search algorithm (FB), and the partial exhaustive search algorithm (EX) with an empty instantiation initialization (e) and a marginal pivot initialization (mp) on a set of
benchmark Bayesian networks. “Targets” shows the number of target variables in the models. “Size of solution space” is the
number of candidate solutions to choose from. Accuracy is defined as the percentage of cases solved correctly. Efficiency is the
percentage of solution space searched.
5
Empirical Results
In this paper, we propose three local search methods: the
forward search algorithm (F), the forward-backward search
algorithm (FB), and the partial exhaustive search algorithm
(EX). In case of the forward search algorithm, it generates
two versions by applying two initialization rules: an empty
instantiation initialization (e) and a marginal pivot initialization (mp). The forward-backward search algorithm and
the partial exhaustive search algorithm use these two results
from the forward search algorithm and also have two possible versions each. Finally, we have six possible algorithms
out of the three methods, denoted as Fe , Fmp , FBe , FBmp ,
EXe , and EXmp .
5.1 Experimental Design
We tested three local search algorithms on a set of benchmark Bayesian networks, including Alarm, Carpo, Hepar,
Insurance, and Munin.
We chose these models because we have the diagnostic versions of these networks,
whose variables have been annotated into three categories:
target, observation, and auxiliary. For generating the test
cases, we used the networks as generative models and sampled without replacement from their prior probability distributions. We only kept those test cases with at least one
100%
Accuracy
sults but still may result in sub-optimal solutions. Since the
forward search typically narrows down the set of candidate
target variables significantly, we propose to run the exhaustive search algorithm on the variables identified by forward
search, which we call partial exhaustive search. If the results of forward search find all the relevant target variables,
the partial exhaustive search algorithm guarantees to find the
optimal solutions because it searches all the partial instantiations of a starting solution.
If the results of forward search happen to include a majority or all of the target variables, partial exhaustive search
may reduce to the the full exhaustive search algorithm.
However, our empirical results show that the number of target variables found is typically small for large Bayesian networks.
95%
Fe
Fmp
FBe
FBmp
EXe
EXmp
90%
0%
5%
10%
15%
Efficiency
Figure 3: The average Accuracy and Efficiency of each algorithm in Alarm, Carpo, Hepar, Insurance, and Munin networks.
abnormal observation. Munin, Insurance, Hepar, Carpo, and
Alarm have 4, 5, 9, 10, and 12 target variables respectively.
We collected 200 test cases for each network.
5.2 Results and Analyses
Our experiments compared results of local MRE methods
with the optimal MRE solution obtained by the systematic
search. Each algorithm is scored with two metrics, accuracy
and efficiency. They are defined as follows:
Accuracy =
#Test cases solved correctly
#All test cases
(4)
#Search steps
. (5)
Size of the entire solution space
The results are shown in Table 1. The average of the results are shown in Figure 3. We did not report running times
because they are proportional to the efficiency measure for
any given model. We observe that the algorithms provides a
wide-range of trade-off between accuracy and efficiency.
Ef f iciency =
• The forward search algorithm finds a solution very
quickly, but its accuracy is lower than the other two algorithms.
• The forward-backward search algorithm provides slightly
better accuracy and worse efficiency than the forward
search algorithm. Because the forward-backward search
starts from the result of the forward search, the accuracy
result of the forward-backward search is guaranteed to be
no worse than forward search.
• Two initialization rules of the forward search algorithm
have different performances. The empty-instantiation initialization method is fast but with lower accuracy. In comparison, the marginal pivot initialization method demonstrates higher accuracy but searches larger space than the
empty-instantiation initialization method.
• The partial exhaustive search is the most accurate algorithm among three. It is not surprising because it exhaustively searches all the variables found by forward search.
It shows pretty high accuracy on all the benchmark models. Because it sacrifices speed for accuracy, however, its
efficiency is worse than the other two algorithms. Especially on Munin network, the efficiency of the partial
exhaustive search reaches about 50%. For the Munin network, there are only four target variables. The optimal solution often contains a majority of the target variables. In
that case, not many target variables are excluded from the
forward search either. The partial exhaustive search algorithm often reduces to the systematic search algorithm
because the number of target variables given to the partial exhaustive search algorithm is not partial any more.
That is why the efficiency on the Munin network is poor.
In comparison, when the network has relatively many target variables, say Alarm, the performance of local search
algorithms is outstanding.
6
Concluding Remarks
In this paper, we show that the computational complexity
of Most Relevant Explanation (MRE) is N P P P -complete,
which motivates us to develop efficient approximate methods for solving MRE. According to the similarity between
MRE and feature selection, we develop three local search
strategies for solving MRE approximately, including the forward search algorithm, the forward-backward search algorithm and the partial exhaustive search algorithm.
Our experimental results show that the proposed local
search methods can often solve MRE efficiently and accurately. In case of the network having the relatively large
number of target variables, say Alarm, local search methods
search only 0.01 - 0.79% of the entire solution space, but
they solve 94.00 - 99.50% of test cases optimally.
By introducing three local search strategies with two initialization rules each, totally six possible algorithms, we provide a wide selection of algorithms. The different algorithms
provide a trade-off between accuracy and efficiency. If a fast
algorithm is needed, the forward search algorithm and the
forward-backward search algorithm can be used. If accuracy is more important, the partial exhaustive search algorithm can be used to achieve the highest accuracy.
7 Acknowledgements
This research was supported by the National Science
Foundation grants IIS-0842480 and EPS-0903787. All
experimental data have been obtained using SMILE, a
Bayesian inference engine developed at the Decision Systems Laboratory at University of Pittsburgh and available at
http://genie.sis.pitt.edu.
References
Cook, S. 1971. The complexity of theorem proving procedures. In Proceedings of the Third Annual ACM Symposium on Theory of Computing, 151158.
Fitelson, B. 2007. Likelihoodism, Bayesianism, and relational confirmation. Synthese 156(3).
Gill, J. 1977. Computational complexity of probabilistic
turing machines. SIAM Journal on Computing 6(4):675–
695.
Green, P. 1995. Reversible jump Markov chain Monte
Carlo computation and Bayesian model determination.
Biometrica 82:711–732.
Lauritzen, S. L., and Spiegelhalter, D. J. 1988. Local
computations with probabilities on graphical structures and
their application to expert systems. Journal of the Royal
Statistical Society, Series B (Methodological) 50(2):157–
224.
Littman, M.; Goldsmith, J.; and Mundhenk, M. 1998. The
computational complexity of probabilistic planning. Journal of Artificial Intelligence Research 9:1–36.
Littman, M. L.; Majercik, S. M.; and Pitassi, T. 2001.
Stochastic Boolean satisfiability. J. Autom. Reasoning
27(3):251–296.
Molina, L. C.; Belanche, L.; and Nebot, A. 2002. Feature selection algorithms: a survey and experimental evaluation. Proceedings of 2002 IEEE International Conference
on Data Mining 306–313.
Park, J. D., and Darwiche, A. 2001. Approximating MAP
using local search. In Proceedings of the 17th Conference
on Uncertainty in Artificial Intelligence (UAI–01), 403–
410.
Park, J. D., and Darwiche, A. 2004. Complexity results and
approximation strategies for MAP explanations. J. Artif.
Intell. Res.(JAIR) 21:101–133.
Park, J. D. 2002. MAP complexity results and approximation methods. In Proceedings of the 18th Conference on
Uncertainty in Artificial Intelligence (UAI–02), 388–396.
Yuan, C., and Lu, T.-C. 2008. A general framework for
generating multivariate explanations in Bayesian networks.
In Proceedings of the Twenty-Third National Conference
on Artificial Intelligence (AAAI-08).
Yuan, C.; Liu, X.; Lu, T.-C.; and Lim, H. 2009. Most
Relevant Explanation: Properties, algorithms, and evaluations. In Proceedings of 25th Conference on Uncertainty
in Artificial Intelligence (UAI-09).