Single-Phase SEPIC Based PFC Converter for PMBLDCM Drive in
advertisement

Sanjeev Singh et.al: Single-Phase SEPIC…..
Single-Phase SEPIC Based PFC Converter for
PMBLDCM Drive in Air-Conditioning System
Sanjeev Singh
1
Abstract – In this paper, a permanent magnet brushless DC
motor (PMBLDCM) is employed in air-conditioning systems
and operated at rated torque and variable speed to achieve
energy conservation. A single-phase single-switch power
factor correction (PFC) based single ended primary inductor
converter (SEPIC) is used to regulate DC bus voltage of
voltage source inverter (VSI) to feed PMBLDCM. The
analysis, design and performance evaluation of the proposed
PFC converter is carried out for a 1.2 kW, 1200 rpm, 164 V
PMBLDCM used in air-conditioning system. The proposed
PFC converter is modeled and its performance is simulated in
Matlab-Simulink environment. An exhaustive evaluation of its
performance is carried out to demonstrate improved power
factor in wide range of speed of the drive and AC input
voltage.
Keywords – PFC converter, SEPIC, PMBLDC motor, airconditioning, power quality (PQ)
I. INTRODUCTION
Air-conditioners (Air-Cons) constitute a considerable
amount of load in AC distribution system [1]. However,
most of the existing air-conditioners are not energy
efficient and thereby, provide a scope for energy
conservation. Air-Cons in domestic sector are usually
driven by a single-phase induction motor running at
constant rated torque with on-off control [1]. A permanent
magnet brushless DC motor (PMBLDCM) is a good drive
for Air-Cons due to its high efficiency, silent operation,
compact size, high reliability, ease of control and low
maintenance requirements.
A PMBLDCM is a kind of three-phase synchronous motor
having permanent magnets on the rotor [2-7]. Usually these
PMBLDCMs in small Air-Cons are powered from singlephase AC mains through a diode bridge rectifier (DBR)
with smoothening DC capacitor and a three-phase voltage
source inverter (VSI) [3-4, 6-7]. Because of uncontrolled
charging of DC link capacitor, the AC mains current
waveform is a pulsed waveform featuring a peak value
higher than the amplitude of the fundamental input current
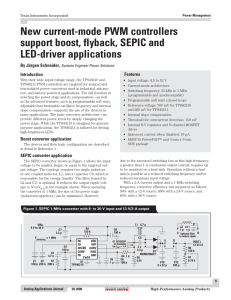
as shown in Fig. 1. The power factor (PF) is 0.741 and
crest factor (CF) of AC mains current is 2.2 with 67%
efficiency of the drive. Therefore, many power quality (PQ)
problems arise at input AC mains including poor power
factor, increased total harmonic distortion (THD) and high
crest factor (CF) of AC mains current etc. These PQ
problems as addressed in IEC 61000-3-2 [8] especially in
low power appliances become severe for the utility when
many such drives are employed simultaneously at nearby
locations.
Therefore, PMBLDCM drives having inherent power
factor correction (PFC) become the preferred choice for the
Air-Cons. The PFC converter draws sinusoidal current
The paper first received 17 June 2009 and in revised form 10 March 2010.
Digital Ref: A170601230
1,2
Electrical Engineering Department, Indian Institute of Technology,
Delhi, India, e-mail: sschauhan.sdl@gmail.com, bhimsinghr@gmail.com.
16
Bhim Singh
2
from AC mains in phase with its voltage. In this PFC
converter a DC-DC converter topology is mostly used
amongst several available topologies [9-16] e.g. boost,
buck-boost, Cuk, SEPIC, zeta converters with variations of
capacitive/inductive energy transfer. It results in an
improved performance, such as reduction of AC mains
current harmonics, acoustic noise, electromagnetic
interference (EMI) and number of components; improved
efficiency, wide input voltage range utilization etc.
Some attempts [11,13,16] have been made to introduce
PFC feature in PMBLDCM drives using uni-polar
excitation [13] and bipolar excitation [11,16] of
PMBLDCMs. For automotive air-conditioning a low
voltage PMBLDCM drive has been reported [15] with
compact size of the complete system. PMBLDCM with
boost PFC converter [11] and PMSM with improved power
quality converter [12] have been reported for domestic AirCons. However, a PMBLDCM is best suited for airconditioning system due to simple control and its high
average torque.
Fig. 1: Supply current and harmonic spectrum (at 220 VAC) of a
DBR fed PMBLDCM drive at rated load.
A single ended primary inductor converter (SEPIC), as a
PFC converter, inherits merits of continuous input current,
ripple current reduction [16-17]. Therefore, a SEPIC
converter is proposed for PFC in a PMBLDCM drive used
to drive Air-Cons. This paper, deals with detailed design
and exhaustive performance evaluation of the SEPIC
converter as a PFC converter, for PMBLDCM driven airconditioner system.
II. OPERATION AND CONTROL OF SEPIC CONVERTER
FED PMBLDCM
Fig. 2 shows the proposed SEPIC based PFC converter fed
PMBLDCM drive for the speed control as well as PFC in
wide range of input AC voltage. A proportional-integral (PI)
controller [4] is used for the speed control of the
PMBLDCM driving constant torque compressor of AirCon. The speed signal converted from the rotor position of
PMBLDCM (sensed using Hall effect sensors) are
compared with the reference speed. The resultant speed
error is fed to a speed controller to give the torque which is
converted to current signal. This signal is multiplied with a
rectangular unit template in phase with top flat portion of
motor’s back EMF to get reference currents of the motor.
Asian Power Electronics Journal, Vol. 4 No.1 April 2010
These reference motor currents are compared with sensed
motor currents to give current error. These current errors
are amplified and compared with triangular carrier wave to
generate the PWM pulses for VSI switches.
current in the intermediate inductor (Lo) as it operates on
the principle of an inductive energy transfer [17]. The boost
inductor (Li), and capacitors (C1, Co) are designed
according to maximum allowable current and voltage
ripple during transient conditions of the PMBLDCM drive.
The design equations governing the duty ratio and other
component values are as follows.
Output voltage
Boost inductor
Intermediate capacitor
Output filter inductor
Output filter capacitor
Vdc=D Vin /(1-D)
Li= D Vin/ {fs (ΔILi)}
C1= D / {(Rfs) (Δ VC1/ Vo)}
Lo= (1-D)Vdc/{fs(ΔILo)
Co=Iav/(2ωΔVdc)
(1)
(2)
(3)
(4)
(5)
The PFC converter is designed for a constant DC link
voltage Vdc = 400V at Vin = 198V for Vs = 220V. Other
design data are fs = 40kHz, Iav = 5A, R= 80Ω, ΔILi= 0.75A,
ΔILo= 0.75 A (15% of Iav), ΔVdc= 5V (1.25% of Vdc), ΔVC1=
15V (3.75% of Vdc). The design parameters calculated are
Li=4.5mH, C1=5µF, Lo=4.5mH, Co=1600µF.
Fig. 2: Control Schematic of PFC based SEPIC Converter fed
PMBLDCM Drive
IV. MODELING OF PROPOSED PFC CONVERTER BASED
PMBLDCM DRIVE
The SEPIC based PFC converter has a conventional DBR
fed from single-phase AC mains followed by the SEPIC
DC-DC converter, an output ripple filter and a three-phase
VSI to feed the PMBLDC motor. The DC-DC converter
provides a controlled DC voltage from uncontrolled DC
output of DBR, with PFC action through high frequency
switching. The duty ratio (D) of the DC-DC converter is
controlled by the DC voltages at its input and output. The
switching frequency (fs) is decided by the switching device
used, power range and switching losses of the device. In
this work, insulated gate bipolar transistors (IGBTs) are
used as the switching devices in the PFC switch as well as
in VSI bridge, because IGBTs can operate in wide
switching frequency range to make optimum balance
between magnetics, size of filter components and switching
losses.
The modeling of proposed PFC converter fed PMBLDCM
drive involves modeling of a PFC converter and
PMBLDCM drive. The PFC converter consists of a DBR at
front end and a SEPIC converter with output ripple filter.
Various components of PMBLDCM drive are a speed
controller, a reference current generator, a PWM current
controller, VSI and a PMBLDC motor. All these
components of a PMBLDCM drive are modeled by
mathematical equations and the complete drive is
represented by combination of these models.
The PFC controller has outer voltage control loop and inner
current control loop. An average current control scheme
with current multiplier approach is used in this topology
and a continuous conduction mode (CCM) operation of
SEPIC is considered for PMBLDCM drive. The voltage
control loop starts with sensing of DC link voltage which is
compared with the reference DC link voltage. The error DC
voltage is passed through a voltage PI controller to give the
modulating current signal. This signal is multiplied with a
unit template of input AC voltage and the resultant signal is
compared with DC current sensed after the DBR to give
current error. This current error is amplified and amplified
signal is then compared with saw-tooth carrier wave to
generate the PWM switching pulses for the DC-DC
converter switch.
III. DESIGN OF SEPIC PFC CONVERTER FOR PMBLDCM
Fig. 2 shows the proposed SEPIC converter fed
PMBLDCM drive. The SEPIC converter achieves high
power density and fast transient response when operated at
high switching frequency [16]. It is designed for constant
A. PFC Converter
The modeling of a PFC converter involves the modeling of
a voltage controller, a reference current generator and a
PWM controller as given below.
1. Voltage Controller
The voltage controller is back-bone of PFC converter;
therefore it affects the performance of complete drive. A
proportional integral (PI) controller is used to control the
DC link voltage. If at kth instant of time, V*dc(k) is
reference DC link voltage, Vdc(k) is sensed DC link voltage
then the voltage error Ve(k) is calculated as,
Ve(k) =V*dc(k)-Vdc(k)
(6)
The voltage (PI) controller gives desired control signal
after processing this voltage error. The output of the
controller Ic(k) at kth instant as derived in appendix A is
given as,
(7)
Ic (k) = Ic (k-1) + Kpv{Ve(k) – Ve(k-1)} + KivVe(k)
where Kpv and Kiv are the proportional and integral gains of
the voltage controller.
2. Reference Current Generator
The reference inductor current of the SEPIC converter is
denoted by idc* and given as,
Idc* = Ic (k) uvs
(8)
where uvs is the unit template of the voltage at input AC
mains, calculated as,
17
Sanjeev Singh et.al: Single-Phase SEPIC…..
(9)
uvs = vd/Vsm; vd = |vs|; vs= Vsm sin ωt
where ω is frequency in rad/sec at input AC mains.
3. PWM Controller
The reference inductor current of the SEPIC converter (Idc*)
is compared with its sensed current (Idc) to generate the
current error Δidc=(Idc* - Idc). This current error is amplified
by gain kdc and compared with fixed frequency (fs) sawtooth carrier waveform md(t) to get the switching signals
for the IGBT of the PFC converter as,
then S = 1
(10)
If
kdc Δidc > md (t)
then S = 0
(11)
If
kdc Δidc <= md (t)
where S is the switching function representing ‘on’ position
of IGBT of PFC converter with S=1 and its ‘off’ position
with S=0.
B. PMBLDCM Drive
The modeling of a speed controller is quite important as the
performance of the drive depends on this controller. If at kth
instant of time, ω*r(k) is reference speed, ωr(k) is rotor
speed then the speed error ωe(k) can be calculated as
ωe(k) =ω*r(k)-ωr(k)
(12)
This speed error is processed through a speed controller to
get desired control signal.
1. Speed Controller
The speed controller used in this work is a PI controller due
to its simplicity. Its output at kth instant is given as
T(k) = T(k-1) + Kpω{ωe(k) – ωe(k-1)} + Kiω ωe(k) (13)
where Kpω and Kiω are the proportional and integral gains
of the speed PI controller.
2. Reference Winding Currents
The amplitude of stator winding current is calculated as
I* = T(k) / (2Kb)
(14)
where, Kb is the back emf constant of the PMBLDCM.
The reference three-phase currents of the motor windings
are denoted by ia*, ib*, ic* for phases a, b, c respectively
and given as
(15)
ia* = I*, ib* = - I*, ic* = 0 for 0º ≤ θ ≤ 60º
ia* = I*, ib* = 0,
ic* = - I* for 60º ≤ θ ≤ 120º (16)
ia* = 0, ib* = I*, ic* = - I* for 120º ≤ θ ≤ 180º (17)
ia* = -I*, ib* = I*, ic* = 0 for 180º ≤ θ ≤ 240º (18)
ia* = -I*, ib* = 0,
ic* = I* for 240º ≤ θ ≤ 300º (19)
ia* = 0, ib* = -I*, ic* = I* for 120º ≤ θ ≤ 180º (20)
where θ is rotor position angle in electrical radian/sec.
These reference currents are compared with sensed phase
currents to generate the current errors Δia=(ia* - ia),
Δib=(ib*- ib), Δic=( ic* - ic ) for three phases of the motor.
These current errors Δia, Δib, Δic are amplified by gain k1
before feeding through the PWM current controller.
3. PWM Current Controller
The PWM current controller compares these amplified
current errors of each phase with carrier waveform m(t) of
a fixed frequency and generates the switching sequence for
the voltage source inverter based on the logic given for
phase “a” as,
18
If
If
k1 Δia > m (t)
k1 Δia <= m (t)
then Sa = 1
then Sa = 0
(21)
(22)
The switching sequences Sb and Sc are generated using
similar logic for other two phases of the VSI feeding
PMBLDC motor.
4. Voltage Source Inverter
Fig. 3 shows an equivalent circuit of a VSI fed PMBLDCM.
The output of VSI to be fed to phase ‘a’ of the PMBLDC
motor is given as,
(23)
vao = (Vdc/2) for Sa1 = 1, Sa2 = 0
vao = (-Vdc/2) for Sa1 = 0, Sa2 = 1
(24)
for Ia* = 0
(25)
vao = 0
van = vao – vno
(26)
Using similar logic vbo, vco, vbn, vcn are generated for other
two phases of the VSI feeding PMBLDC motor, where vao,
vbo, vco, and vno are voltages of three-phases and neutral
with respect to virtual mid-point of the capacitor shown as
‘o’ in Fig. 3. The voltages van, vbn, vcn are voltages of threephases with respect to neutral and Vdc is the DC link
voltage.
Fig. 3: Equivalent Circuit of a VSI fed PMBLDCM Drive
5. PMBLDC Motor
The PMBLDCM is modeled in the form of a set of
differential equations given in Table 1.
Table 1: Modeling Equations of PMBLDC Motor
vxn = Rix + pλx +exn,
λa = Lia - M(ib + ic);
λb = Lib - M(ia + ic);
λc = Lic - M(ib + ia)
ia + ib + ic = 0;
van = vao – vno
vno = {vao +vbo + vco – (ean +ebn +ecn)}/3
λa = (L+M) ia, λb = (L+M) ib, λc = (L+M) ic,
pix = (vxn - ix R – exn)/(L+M)
Te = (ean ia + ebn ib +ecn ic)/ ω and
exn= Kb fx(θ) ω
for 0 < θ < 2π/3
fa(θ) = 1
for 2π/3 < θ < π
fa(θ) = {(6/ π)( π- θ)}-1
for π < θ < 5π/3
fa(θ) = -1
for 5π/3 < θ < 2π
fa(θ) = {(6/π)(θ -2π)}+1
Te = Kb{fa(θ) ia + fb(θ) ib+ fc(θ) ic}
pω = (P/2) (Te-TL-Bω)/(J)
These equations (Table 1) represent the dynamic model of
the PMBLDC motor. Various symbols used in these
equations are the reference currents of the PMBLDCM for
phases a, b, c are ia*, ib*, ic*, current error of phase “a” is
Δia, error gain k1 and carrier waveform for the PWM
current controller m(t). Voltages of the three-phases and
neutral point (n) with respect to virtual mid-point of the DC
Asian Power Electronics Journal, Vol. 4 No.1 April 2010
link voltage ‘o’, vao, vbo, vco, and vno, voltages of threephases with respect to neutral point (n) van, vbn, vcn and the
DC link voltage Vdc as shown in Fig. 2. R is resistance of
motor/phase, L is self-inductance/phase, M is mutual
inductance of motor winding/phase and x represents any of
the phases a, b or c, p is a differential operator (d/dt), ia, ib,
ic are line currents, ean, ebn, ecn are phase to neutral back
emfs, θ is rotor position and ω=pθ is speed of PMBLDCM
in rad/sec, P is number of poles, TL is load torque in Nm, J
is moment of inertia in kg-m2 and B is friction coefficient
in Nms/Rad.
V. PERFORMANCE EVALUATION
The proposed PMBLDCM drive is modeled in MatlabSimulink environment and its performance is evaluated for
a compressor load of an Air-Con. A constant torque load
equal to rated torque mimics the compressor load of AirCon, while running at variable speed as per requirement of
air-conditioning system. The PMBLDCM of 1.2 kW, 164
V, 5 A rating, with 1200 rpm rated speed and 9.61 Nm
rated torque is used to drive such load. The detailed data of
the PMBLDC motor [6] are given in Appendix B. The
performance of the drive is simulated for constant rated
torque (9.61 Nm) at rated speed. The DC link voltage is
kept constant at 400 V with an input AC rms voltage of 220
V. The components of SEPIC converter are selected on the
basis of PQ constraints at AC mains and allowable ripple in
DC-link voltage as discussed in Section III. The controller
gains are tuned to get the desired PQ parameters and the
values of controller gains are given in Appendix. The
performance evaluation is made on the basis of various PQ
parameters i.e. total harmonic distortion of current (THDi)
at input AC mains, displacement power factor (DPF),
power factor (PF), crest factor (CF), rms value of input AC
current (Is) and efficiency (ηdrive) of the drive.
A. Performance during Starting
Fig 4 shows that the starting of the drive is smooth with
rated torque (9.61 Nm) and PFC is achieved during the
starting of the drive. The motor is started from 220 Vrms AC
input at rated torque with reference speed set at rated speed
i.e. 125.7 rad/s (1200 rpm). The maximum allowable
torque and the stator current during transient condition are
limited to double the rated value. The motor speed reaches
the reference speed within 0.1 sec. and resumes the rated
value of stator current and motor torque within a cycle of
AC mains frequency.
B. Performance at Variable Speeds
Figs. 5a-c show the performance of the drive during speed
control of Air-Cons. The speed is increased and decreased
at rated torque for detailed evaluation of the drive. The
motor speed is increased to rated speed i.e. 125.7 rad/s
(1200 rpm) and decreased to half the rated speed i.e. 62.85
rad/s (600 rpm) from 80% of the rated speed i.e. 100.53
rad/s (960 rpm) as shown in Figs. 5a and 5b, respectively.
The motor reaches the reference speed within couple of
cycles of AC mains frequency during these changes.
Moreover, the motor speed is reduced to 20% of its rated
value i.e. 25.13 rad/s (240 rpm) from 62.85 rad/s (600 rpm)
within 0.01 sec. while achieving the PFC at input AC
mains (as shown in Fig. 5c). These results validate fast
control of speed, current and torque in an Air-Con with the
proposed PMBLDCM drive.
Fig. 4: Performance of a SEPIC converter fed PMBLDCM drive
during Starting at rated speed i.e. 1200 rpm (125.7 rad/s) and
rated torque (9.61 Nm) with 220 VAC input supply
(a): Speed change from 960 rpm (100.5 rad/s) to 1200 rpm (125.7
rad/s) at rated torque (9.61 Nm)
(b): Speed change from 960 rpm (100.5 rad/s) to 600 rpm (62.83
rad/s) at rated torque (9.61 Nm)
19
Sanjeev Singh et.al: Single-Phase SEPIC…..
(c) Speed change from 600 rpm (62.83 rad/s) to 240 rpm (25.13
rad/s) at rated torque (9.61 Nm)
Fig. 5: Performance of a SEPIC converter fed PMBLDCM drive
during speed variation at 220 VAC input supply
C. Performance under Steady State Condition
The current waveform at input AC mains and its harmonic
spectrum during steady state at 1200 rpm (125.7 rad/s), 960
rpm (100.53 rad/s), 600 rpm (62.85 rad/s) and 240 rpm
(25.13 rad/s) are shown in Figs. 6a-d. The variation of PQ
parameters and drive efficiency with load (variable speed at
rated torque) is shown in Table 2. The current THD at AC
mains remains less than 5% with near unity power factor in
the wide range of speed control of PMBLDCM drive.
Moreover, an improved performance of the drive is
observed in terms of reduced ripples in torque, current and
speed during steady state conditions.
D. Performance under Input Voltage Variation
Table 3 shows the PQ parameters for variable input AC
voltages (170 V-270 V) at constant DC link voltage (400 V)
to the drive running at rated speed i.e. 125.7 rad/s (1200
rpm) and rated torque (9.61 Nm). These results show
reduced THD of AC mains current (less than 5%) and near
unity PF in wide range of input AC voltage. The efficiency
of the drive remains more than 91% in the complete
voltage range.
The transient and steady state performances, current
waveforms and its harmonic spectra and PQ parameter
variation with speed and input voltage are shown in Figs.
4-6 and Tables 2-3 to provide an exhaustive evaluation of
the proposed drive system. The current THD at input AC
mains in steady state conditions always remains within the
standards of IEC 61000-3-2 [8] and the power factor
remains near unity.
(c) at 600 rpm speed
(d) at 240 rpm speed
Fig.6 Supply current and harmonic spectra (at 220 VAC) of a
SEPIC converter fed PMBLDCM drive during steady-state
condition at rated torque (9.61 Nm).
Table 2: PQ parameters at variable speed and rated torque
(9.61 Nm) at 220 VAC input at 400 V DC link voltage
THDi
Load
ηdrive
DPF
PF
CF
Is (A)
(%)
(%)
(%)
10
1.8
0.9999
0.9999
1.41
1.02
53.5
20
1.09
1.0000
0.9999
1.41
1.59
69.1
30
0.90
1.0000
1.0000
1.41
2.15
76.5
40
0.70
1.0000
1.0000
1.41
2.72
80.7
50
0.74
1.0000
1.0000
1.41
3.28
83.8
60
0.74
1.0000
1.0000
1.41
3.83
86.1
70
0.77
1.0000
1.0000
1.41
4.37
88.0
80
0.84
1.0000
1.0000
1.41
4.91
89.4
90
0.93
1.0000
1.0000
1.41
5.47
90.4
100
1.02
1.0000
0.9999
1.41
6.02
91.3
Table 3: PQ parameters at variable input AC voltage (VAC) at
rated speed (1200 rpm) and rated torque (9.61Nm) at 400 V
DC link voltage
THDi
Vs
ηdrive
DPF
PF
CF
Is (A)
(V)
(%)
(%)
170
2.07
0.9999
0.9997
1.43
7.79
91.3
180
1.77
1.0000
0.9998
1.41
7.35
91.3
190
1.53
1.0000
0.9999
1.41
6.97
91.3
200
1.33
1.0000
0.9999
1.41
6.62
91.3
210
1.16
1.0000
0.9999
1.41
6.30
91.3
220
1.02
1.0000
0.9999
1.41
6.02
91.3
230
0.93
1.0000
1.0000
1.41
5.76
91.3
240
0.85
1.0000
1.0000
1.41
5.52
91.4
250
0.79
1.0000
1.0000
1.41
5.30
91.4
260
0.72
1.0000
1.0000
1.41
5.09
91.4
270
0.68
1.0000
1.0000
1.41
4.90
91.4
VI. CONCLUSION
(a) at 1200 rpm speed
20
(b) at 960 rpm speed
A PFC based SEPIC converter for a PMBLDCM drive has
been designed for a compressor load of an air-conditioner.
The PFC converter has ensured reasonable high power
factor close to unity in wide range of the speed as well as
input AC voltage. Moreover, performance parameters show
an improved power quality with less torque ripple, smooth
speed control of the PMBLDCM drive. The THD of AC
Asian Power Electronics Journal, Vol. 4 No.1 April 2010
mains current is observed well below 5% in most of the
cases and satisfies the international standards [8]. The
performance of the drive is very good in the wide range of
input AC voltage with desired power quality parameters.
This converter has been found suitable for the speed control
at constant torque load of air-conditioning systems.
APPENDIX A
The output of the voltage PI controller Ic(k-1) [4] having
Kpv and Kiv as proportional and integral gains and Ve as
voltage error, is calculated at (k-1)th instant, as
k-1
Ic (k-1)=K pv Ve (k-1)+K iv ∑ Ve (i)
(A1)
i=1
The output of the PI controller Ic(k) at kth instant, is
k
Ic (k)=K pv Ve (k)+K iv ∑ Ve (i)
(A2)
i=1
Subtracting eqn. (a1) from eqn. (a2), the relation
becomes as,
(A3)
Ic(k)- Ic(k-1) =Kpv{Ve(k)- Ve(k-1)}+KivVe(k)
Therefore, the output of the PI controller Ic(k) at kth
instant is given as
(A4)
Ic(k)= Ic(k-1) + Kpv{Ve(k)- Ve(k-1)}+KivVe(k)
APPENDIX B
Rated Power: 1.2 kW, Rated Voltage: 164 V, Rated Speed: 1200
rpm, Rated Current: 5.0 A, Rated torque: 9.61 Nm, No of poles: 6,
Resistance R: 1.91 Ω/ph., Inductance (L+M): 9.55 mH/ph.,
Torque constant KT : 0.332 Nm/A, Inertia J= 0.00776 Kg-m2. The
Circuit Parameters used for simulations: Source impedance: 0.03
pu, Switching frequency of PFC switch = 40 kHz. The gains of
voltage and speed PI controllers: Kpv=0.485, Kiv=6.85,
Kpω=0.11, Kiω=1.2.
REFERENCES
[1] A. M. Jungreis and A.W. Kelley, “Adjustable speed drive for
residential applications”, IEEE Trans. Ind. Appl.,
Vol.31, No.6, Nov.-Dec. 1995, pp.1315 – 1322.
[2] T. Kenjo and S. Nagamori, Permanent Magnet Brushless DC
Motors, Clarendon Press, oxford, 1985.
[3] T. J. Sokira and W. Jaffe, Brushless DC Motors: Electronic
Commutation and Control, Tab Books USA, 1989.
[4] J. R. Hendershort Jr and T. J. E. Miller, Design of Brushless
Permanent-Magnet Motors, Clarendon Press, Oxford, 1994.
[5] J. F. Gieras and M. Wing, Permanent Magnet Motor
Technology – Design and Application, Marcel Dekker Inc.,
New York, 2002.
[6] N. Matsui, “Sensorless PM brushless DC motor drives”,
IEEE Trans. Ind. Electron., Vol.43, No.2, April 1996, pp.
300 – 308.
[7] P. Pillay and R. Krishnan, “Modeling, simulation and
analysis of a permanent magnet brushless dc motor drives,
part II: the brushless dc motor drive”, IEEE Trans. Ind. Appl.,
Vol. 25, No.2, Mar. Apr 1989, pp 274-279.
[8] Limits for Harmonic Current Emissions (Equipment input
current ≤16 A per phase), International Standard IEC 610003-2, 2000.
[9] J. Sebastian, J. A. Cobos, J.M. Lopera and U. Uceda, “The
determination of the boundaries between continuous and
discontinuous conduction modes in PWM DC-to-DC
converters used as power factor preregulators”, IEEE Trans.
Power Electron., Vol.10, No.5, Sept. 1995, pp. 574 – 582.
[10] D. S. L. Simonetti, J. Sebastian and J. Uceda, “The
discontinuous conduction mode Sepic and Cuk power factor
preregulators: analysis and design”, IEEE Trans. Ind.
Electron., Vol.44, No.5, Oct. 1997, pp. 630 – 637.
[11] Bhim Singh, B.P. Singh and M Kumar, “PFC converter fed
PMBLDC motor drive for air conditioning”, IE(I) JournalEL, Vol. 84, June 2003, pp. 22-27.
[12] B. Singh, SS Murthy, BP Singh and M. Kumar, "Improved
power quality converter fed permanent magnet AC motor for
air conditioning", Electric Power System Research, Vol. 65,
No.3, 2003, pp 239-245.
[13] T. Gopalarathnam, and H. A. Toliyat, “A new topology for
unipolar brushless dc motor drive with high power factor”,
IEEE Trans. Power Electron., Vol. 18, No. 6, Nov. 2003, pp.
1397-1404.
[14] O. García, J.A. Cobos, R. Prieto, P. Alou and J. Uceda,
“Single Phase Power factor correction: A survey”, IEEE
Trans. Power Electron., Vol. 18, May 2003, pp. 749-755.
[15] M. Naidu, T.W. Nehl, S. Gopalakrishnan and L. Wurth,
“Keeping cool while saving space and money: a semiintegrated, sensorless PM brushless drive for a 42-V
automotive HVAC compressor”, IEEE Ind. Appl. Mag., Vol.
11, No. 4, July-Aug, 2005 pp. 20 – 28.
[16] J.M. Kwon, W.Y. Choi, J.J. Lee, E.H. Kim and B.H. Kwon,
“Continuous-conduction-mode SEPIC converter with low
reverse-recovery loss for power factor correction”, Proc.
IEE –EPA, Vol.153, No.5, Sep. 2006, pp. 673 – 681.
[17] R. Ridley, “Analyzing the SEPIC converter”, Power System
Design Europe, Nov. 2006, pp. 14-18.
BIOGRAPHIES
Sanjeev Singh was born in Deoria, India, in
1972. He received B.E (Electrical) degree
from A.P.S.University, Rewa, India, in 1993
and the M.Tech degree from DAVV, Indore,
India, in 1997.
He joined North India Technical Consultancy
Organization, Chandigarh as a Project Officer,
in 1997, and in 2000, he joined Sant
Longowal Institute of Engineering &
Technology, Sangrur, Punjab, as Lecturer in
the
Department
of
Electrical
and
Instrumentation Engineering. His area of
interest includes power electronics, electrical machines and drives, energy
efficiency and power quality.
Mr. Singh is a Student Member of Institute of Electrical and Electronics
Engineers (IEEE), a Life Member of the Indian Society for Technical
Education (LMISTE) as well as the System Society of India (SSI).
Bhim Singh was born in Rahampur, India,
in 1956. He received B.E (Electrical) degree
from the University of Roorkee, Roorkee,
India, in 1977 and the M.Tech and Ph.D.
degree from the Indian Institute of
Technology (IIT) Delhi, New Delhi, India,
in 1979 and 1983, respectively.
In 1983, he joined the Department of
Electrical Engineering, University of
Roorkee, as a lecturer, and in 1988 became
a Reader. In December 1990, he joined the
Department of Electrical Engineering, IIT Delhi, as an Assistant Professor.
He became an Associate Professor in 1994 and Professor in 1997. His area
of interest includes power electronics, electrical machines and drives,
active filters, FACTS, HVDC and power quality.
Dr. Singh is a fellow of Institute of Electrical and Electronics Engineers
(FIEEE), Indian National Academy of Engineering (FNAE), the National
Academy of Science (India) (FNASc), the Institution of Engineers (India)
(FIE(I)), and the Institution of Electronics and Telecommunication
Engineers (FIETE), a life Member of the Indian Society for Technical
Education (LMISTE), the System Society of India (LMSSI), and the
National Institution of Quality and Reliability (LMNIQR)
21