LARGE DEFORMATION CONSTITUTIVE LAWS FOR ISOTROPIC
advertisement

LARGE DEFORMATION CONSTITUTIVE LAWS FOR
ISOTROPIC THERMOELASTIC MATERIALS
BRADLEY J. PLOHR AND JEEYEON N. PLOHR
Abstract. We examine the approximations made in using Hooke’s law as a constitutive
relation for an isotropic thermoelastic material subjected to large deformation. For a general
thermoelastic material, we employ the volume-preserving part of the deformation gradient to
facilitate volumetric/shear strain decompositions of the free energy, its first derivatives (the
Cauchy stress and entropy), and its second derivatives (the specific heat, Grüneisen tensor,
and elasticity tensor). Specializing to isotropic materials, we calculate these constitutive
quantities more explicitly. For deformations with limited shear strain, but possibly large
changes in volume, we show that the differential equations for the stress involve new terms
in addition to the traditional Hooke’s law terms. These new terms are of the same order
in the shear strain as the objective derivative terms needed for frame indifference; unless
the latter terms are negligible, the former cannot be neglected. We also demonstrate that
accounting for the new terms requires that the deformation gradient be included as a field
variable.
1. Introduction
The partial differential equations governing the motion of an isotropic thermoelastic material are often assumed to consist of the mass and momentum equations
ρ̇ + ρv j ;j = 0,
(1.1)
ρv̇ i − σ ij ;j = 0
(1.2)
together with constitutive relations of the incremental, or rate, form
−ṗ = K tr d,
ij
(1.3)
ij
ṡ = 2G (dev d)
(1.4)
to determine σ ij = −p δ ij + sij . The notation used here is as follows: ρ is the mass density,
v i is the particle velocity vector, σ ij is the Cauchy stress tensor, p := − 13 tr σ is the mean
pressure, sij := (dev σ)ij is the deviatoric (i.e., trace-free) part of σ ij , dij := 21 (vi;j + vj;i ) is
the rate of deformation tensor, K is the adiabatic bulk modulus, and G is the shear modulus;
also, a 3 × 3 matrix A has trace tr A := Ak k and deviator (dev A)i j := Ai j − 13 (tr A)δ i j ,
a semicolon indicates spatial differentiation (e.g., v i ;j := ∂v i /∂xj ), and a dot represents the
convective time derivative (e.g., ρ̇ := ∂ρ/∂t + v k ρ;k ).
Whereas Eqs. (1.1) and (1.2) reflect fundamental physical principles (the conservation
of mass and Newton’s law), the constitutive relations (1.3) and (1.4), which embody the
incremental form of Hooke’s law, are only approximate. Indeed, they lack three properties.
2000 Mathematics Subject Classification. Primary 74A20; Secondary 74B15.
Key words and phrases. elastic material, constitutive behavior, finite strain.
Supported by the U.S. Department of Energy.
1
2
B. PLOHR AND J. PLOHR
(1) Frame indifference. Equation (1.4) is not preserved by superposed rigid-body motions. This problem is addressed by replacing ṡij on the left-hand side by an objective time derivative of sij , e.g., its Zaremba-Jaumann [22, 8] or Green-NaghdiMcInnis [6, 5] derivative. However, various objective derivatives are available. Therefore, if one insists on the form of the right-hand side of Eq. (1.4), the question arises
as to which objective derivative to choose (see, e.g., Ref. [9]).
(2) Thermodynamic consistency. The constitutive coefficients K and G are usually taken
to be constants, but basic thermodynamics principles require them to depend on the
state of deformation of the material [17]. To find the correct form of this dependence,
these coefficients should be calculated as second derivatives of the Helmholtz free
energy with respect to strain.
(3) Conservative form. Because the constitutive relations Eqs. (1.3) and (1.4) are not in
conservative form, they cannot be used when the flow contains discontinuities such as
shock waves. (In contrast, the mass and momentum equations (1.1) and (1.2) have
well-known conservative forms.) Constitutive relations like Eqs. (1.3) and (1.4) can
be replaced by conservation laws if equations for the deformation gradient, rather
than the stress, are adopted [14, 19, 15].
In this paper, we derive conservative Eulerian governing equations and constitutive relations for isotropic thermoelastic materials. The keys to removing the deficiencies of Eqs. (1.3)
and (1.4) are (a) the introduction of the deformation gradient as a field variable and (b) the
derivation of constitutive relations from the free energy. After carrying out the calculation of
the first and second derivatives of the free energy in detail, we find that the incremental stress
law contains new terms of the same order in the shear strain as the objective derivative terms
needed for frame indifference. As such objective derivative terms can significantly affect the
predictions of a constitutive model [9], the new terms cannot be neglected; we illustrate their
effect in shear flow. However, because of the new terms, the governing system of equations
in incremental form does not close. The remedy is to include the deformation gradient as a
field variable and solve the additional partial differential equations that governs it.
The paper is structured as follows. After briefly reviewing, in Secs. 2 and 3, the Lagrangian
and Eulerian descriptions of the motion of a continuum, including the conservative formulation of the governing equations, we discuss the constitutive assumptions for a thermoelastic
material in Sec. 4. Then, in Sec. 5, we decompose the strain into its volumetric and shear
parts and calculate the corresponding decompositions of various constitutive quantities. The
formulae we derive are applied to the case of an isotropic material in Sec. 6. Approximations
that are appropriate when the shear strain is small are analyzed in Sec. 7. In Sec. 8, we
contrast our constitutive equations with others that are commonly used. Finally, in Sec. 9,
we present our conclusions.
2. Lagrangian Description
In describing the motion of a material body, we use two systems of coordinates: material
coordinates that label the points of the body and spatial coordinates that label the possible
positions of the material points. Because it is useful conceptually to distinguish these coordinate systems, we denote material coordinates by X α , α = 1, 2, 3, and spatial coordinates
by xi , i = 1, 2, 3. The Lagrangian (or material) description of the motion uses fields that are
functions of material coordinates, whereas the fields in the Eulerian (or spatial) description
are functions of spatial coordinates. It is likewise helpful to distinguish Lagrangian and
LARGE DEFORMATION ISOTROPIC THERMOELASTICITY
3
Eulerian tensors. For example, we denote the particle velocity by V j when it is regarded as
a function of X α and t, whereas we employ the notation v j when it is regarded as a function
of xi and t.
Our focus in this paper is the Eulerian description, but as a preliminary step we recall
some basic results concerning the Lagrangian description [10, 2].
2.1. Kinematics. Having chosen a reference configuration for the body (e.g., the undeformed configuration), let each point of the body be labeled by its material coordinates X α ,
α = 1, 2, 3, in this configuration. The evolution of the body is then characterized by a timedependent map x̂i , called the motion, that specifies the spatial coordinates xi , i = 1, 2, 3, of
each material point X α at time t:
xi = x̂i (X, t).
(2.1)
If X α is held fixed, then Eq. (2.1) describes the trajectory of the material point labeled by
X α . Therefore this particle moves with velocity V i (X, t), where
V i :=
∂ x̂i
.
∂t
(2.2)
On the other hand, with t held fixed, Eq. (2.1) characterizes the deformation of the body
at time t. Indeed, neighboring material points X α and X α + dX α are placed at the spatial
positions x̂i (X, t) and x̂i (X, t) + F i α (X, t) dX α , respectively, where
F
i
α
∂ x̂i
:=
∂X α
(2.3)
is the deformation gradient.
2.2. Conservation laws. The motion of a body is governed by the principles of conservation
of mass, momentum, and energy. Momentum conservation, for instance, means that the
acceleration of material points is driven by the internal stress in the body. (For simplicity,
we dispense with body forces; we also omit heat supply and conduction terms from the
energy equation.) In the Lagrangian description, these conservation principles take the form
ρ̇0 = 0,
¡
¢
ρ0 V̇ i − F i α S αβ ;β = 0,
¡
¢· ¡
¢
ρ0 12 Vk V k + E − Vi F i α S αβ ;β = 0,
(2.4)
(2.5)
(2.6)
where ρ0 is the mass per unit material volume, S αβ is the symmetric Piola-Kirchhoff stress
tensor, and E is the specific internal energy.
Remark. If the material coordinates are Cartesian, a semicolon indicates differentiation with
respect to the material coordinate with t fixed, and a dot represents the time derivative with
X α fixed. More generally, the Lagrangian formulae in this paper are true for curvilinear
coordinates provided that semicolons and dots are interpreted as covariant derivatives and
provided that material indices are raised and lowered using the material metric tensor.
4
B. PLOHR AND J. PLOHR
2.3. Compatibility conditions. In a thermoelastic material, the stress is determined by
the deformation gradient F i α together with a thermodynamic variable (such as the specific
internal energy or the temperature). Therefore the motion x̂i appears in Eqs. (2.4)–(2.6)
only through its first derivatives F i α and V i . By expanding the set of dynamical equations,
the motion can be eliminated in favor of its first derivatives, as follows [7].
The motion x̂i can be reconstructed from F i α and V i provided that these quantities satisfy
the compatibility conditions
Ḟ i α − V i ;α = 0,
(2.7)
²αβγ F i β;γ = 0,
(2.8)
which are obtained by equating mixed partial derivatives of x̂i . These conditions rule out
tearing and inter-penetration of the material. We refer to Eq. (2.7) as the Lagrangian
continuity equation and to Eq. (2.8) as the Lagrangian curl-free condition. The curl-free
condition can be viewed as an initial-value constraint, because the continuity equation implies
that ²αβγ Ḟ i β;γ = 0, so that Eq. (2.8) holds at any time if it is satisfied at the initial time.
Assuming that the Piola-Kirchhoff stress is known, Eqs. (2.4)–(2.7) form a closed system of
dynamical equations for ρ0 , V i , E, and F i α . Thus, solving for the motion x̂i itself can be
avoided. The Eulerian analog of this feature is important.
3. Eulerian Description
In the Eulerian description, the evolution of a material body can be characterized in
various ways [14, 19]. In this paper, we shall follow Ref. [19] by using the inverse motion.
3.1. Eulerian kinematics. The inverse motion X̂ α is defined so that X̂ α (·, t) is the inverse
of x̂i (·, t) for each fixed time t. Thus X̂ α (x, t) is the label of the material point that is located
at the spatial position xi at time t:
X α = X̂ α (x, t).
(3.1)
As x̂i (X̂(x, t), t) ≡ xi , differentiation with respect to xj yields the relation
F i α (X̂(x, t), t) g α j (x, t) = δ i j ,
(3.2)
where
g α i :=
∂ X̂ α
.
∂xi
(3.3)
Therefore this tensor, called the inverse deformation gradient, is merely the inverse of F i α ,
viewed as a function of xi and t. Similarly, differentiation with respect to t shows that
F i α (X̂(x, t), t) [∂ X̂ α /∂t](x, t) + v i (x, t) = 0, i.e., ∂ X̂ α /∂t = −g α i v i , where
v i (x, t) := V i (X̂(x, t), t)
(3.4)
is the particle velocity as a function of xi and t. Thus the first derivatives of X̂ α are
determined by g α i and v i , which are the Eulerian counterparts of F i α and V i .
LARGE DEFORMATION ISOTROPIC THERMOELASTICITY
5
3.2. Eulerian conservation laws. Let ρ denote the mass per unit spatial volume, σ ij the
Cauchy stress, and ε the specific internal energy, all viewed as functions of xi and t. These
Eulerian fields, evaluated at a point xi and time t, are related to corresponding Lagrangian
fields, evaluated at X α = X̂ α (x, t) and t, in the following manner:
ρ = J −1 ρ0 ,
(3.5)
vi = V i,
(3.6)
σ ij = J −1 F i α S αβ F j β ,
(3.7)
ε = E.
(3.8)
Here J is the determinant of the deformation gradient, i.e., the ratio of spatial to material
volume. In these terms, the Eulerian conservation laws are [10, 2]
¡ ¢
ρ;t + ρv j ;j = 0,
(3.9)
¡ i¢
¡ i j
¢
ρv ;t + ρv v − σ ij ;j = 0,
(3.10)
¢¤
£
¡
¢
¤
£ ¡1
ρ 2 vk v k + ε ;t + ρ 12 vk v k + ε v j − vi σ ij ;j = 0.
(3.11)
Remark. If the material coordinates are Cartesian, spatial differentiation is carried out with
t fixed, and time differentiation holds xi fixed. More generally, the Eulerian formulae in
this paper are true for curvilinear coordinates provided that semicolons are interpreted as
covariant derivatives and provided that spatial indices are raised and lowered using the
spatial metric tensor.
3.3. Compatibility conditions. The derivation and meaning of the compatibility conditions for the inverse motion X̂ α is similar to that for x̂i . Equating mixed partial derivatives
of X̂ α yields the equations
¡
¢
(g α i );t + g α j v j ;i = 0,
(3.12)
²ijk g α j;k = 0,
(3.13)
which are called the Eulerian continuity equation and the Eulerian curl-free condition, respectively. The curl-free condition¡ can be ¢viewed as an initial-value constraint, because the
continuity equation implies that ²ijk g α j;k ;t = 0, so that Eq. (3.13) holds at any time if it
is satisfied at the initial time. Provided that the Cauchy stress is known, Eqs. (3.9)–(3.12)
form a closed system of dynamical equations for ρ, v i , ε, and g α i ; there is no need to solve
for the inverse motion X̂ α itself.
4. Constitutive Assumptions
The governing equations for thermoelastic flow are supplemented by constitutive relations
that determine, for instance, the stress. As mentioned in the introduction, these relations
can take the form of differential equations, but such equations are not in conservative form,
so their meaning for discontinuous solutions is problematic. Instead, we specify the specific
Helmholtz free energy as a function of the strain and the temperature. Then fundamental
thermodynamic principles determine the constitutive relations in terms of derivatives of the
free energy. This is because deforming a thermoelastic body, or changing its temperature,
causes its free energy to vary, which leads to internal stress.
6
B. PLOHR AND J. PLOHR
More precisely, we assume that the material is homogeneous (for simplicity) and thermoelastic, and that it satisfies the axioms of locality, entropy production, and frame indifference.
We now briefly explain these assumptions and their consequences. (Details can be found in
Refs. [10, 2], for example.) The assumption of homogeneity precludes the dependence of ρ0
and the constitutive relations on X α . For a thermoelastic material, the constitutive quantities (namely, the stress, free energy, entropy, and heat flux) are determined by (possibly
the entire history of) the motion and the temperature. The locality and entropy production
axioms imply, through the Coleman-Noll argument, that the free energy at a point depends
solely on the values for the deformation gradient and the temperature at that point, and
that the derivatives of the free energy with respect to these variables give the stress and
entropy. Frame indifference requires the free energy to be unaffected by spatial rotations,
i.e., the free energy depends only on the squared spatial distance
between
neighboring points
¢
¡ k
β
α
α
α
α
X and X + dX . This squared distance is (Fkα dX ) F β dX = Cαβ dX α dX β , where
Cαβ := Fkα F k β is the right Cauchy-Green tensor. Therefore the free energy depends on F i α
solely through Cαβ , or equivalently through the Lagrangian strain tensor
Eαβ := 12 (Cαβ − δαβ ).
(4.1)
(For a discussion of the relationship between this tensor and the infinitesimal strain tensor,
which is used in classical linear elasticity theory, see Sec. 5.1.)
4.1. Thermoelastic response. We henceforth adopt the Eulerian description and regard
the tensors F j β , Cαβ , and Eαβ as functions of xi and t. (That is, we do not bother to use
different notation for these nominally Lagrangian quantities.) Then the Eulerian material
response is determined by the specific Helmholtz free energy
ψ = ψ̂(E, θ)
(4.2)
expressed as a function of the Lagrangian strain tensor Eαβ and the temperature θ. As a
consequence of the Coleman-Noll argument [10, 2], such a choice for the free energy entails
the constitutive relations
¯
∂ψ ¯¯ j
ij
i
(4.3)
σ = ρF α
F β,
∂Eαβ ¯θ
¯
∂ψ ¯¯
η=−
,
(4.4)
∂θ ¯E
ε = ψ +θη
(4.5)
for the Cauchy stress tensor σ ij , the specific entropy η, and the specific internal energy ε.
Once ψ = ψ̂(E, θ) has been given, the conservation laws (3.9)–(3.12) supplemented by the
constitutive relations (4.3)–(4.5) form a complete system of conservation laws for the flow
variables ρ, v i , θ, and g α i .
4.2. Differentials. We shall have need for the differentials of the constitutive relations. As
¯
¯
∂ψ ¯¯
∂ψ ¯¯
dEαβ +
dθ,
(4.6)
dψ =
∂Eαβ ¯θ
∂θ ¯E
¤
£
Eqs. (4.3) and (4.4) along with the formula dEαβ = 12 F k α dFkβ + (dFkα ) F k β show that
ρ dψ = σ ij (dFiβ )(F −1 )β j − ρη dθ.
(4.7)
LARGE DEFORMATION ISOTROPIC THERMOELASTICITY
7
In particular, Eq. (4.5) implies that
ρ dε = σ ij (dFiβ )(F −1 )β j + ρθ dη.
(4.8)
Thus ε is naturally regarded as a function of Eαβ and η. By solving Eq. (4.4) for θ as a
function of (E, η) and substituting for θ in Eq. (4.5), we obtain ε = ε̌(E, η).
Similarly, the differentials of Eqs. (4.3) and (4.4) are
¯
∂ 2 ψ ¯¯
ij
i
j
dσ = ρF α F β
dEγδ + (dF i α )(F −1 )α k σ kj
¯
∂Eαβ ∂Eγδ θ
(4.9)
∂ 2ψ
j
ik
j
−1 β
ij −1
i
F β dθ,
+ σ (dF β )(F ) k + σ ρ dρ + ρF α
∂Eαβ ∂θ
¯
∂ 2ψ
∂ 2 ψ ¯¯
dη = −
dθ.
(4.10)
dEαβ −
∂Eαβ ∂θ
∂θ2 ¯
E
It is standard to define the isothermal elasticity tensor cθijk` , the Grüneisen tensor γ ij , and
the specific heat at constant strain cE by
¯
∂ 2 ψ ¯¯ k `
ijk`
i
j
cθ := ρF α F β
(4.11)
F γF δ,
∂Eαβ ∂Eγδ ¯θ
∂2ψ
−cE γ ij := F i α
F jβ,
(4.12)
∂Eαβ ∂θ
¯
cE
∂ 2 ψ ¯¯
−
:=
(4.13)
.
θ
∂θ2 ¯
E
Therefore
dσ ij = cθijk` (dFkγ )(F −1 )γ ` + (dF i α )(F −1 )α k σ kj
+ σ ik (dF j β )(F −1 )β k + σ ij ρ−1 dρ − ρcE γ ij dθ,
cE
dη = cE γ ij (dFiγ )(F −1 )γ j +
dθ.
θ
Eliminating dθ in favor of dη yields alternative forms of these identities:
dσ ij = c ijk` (dFkγ )(F −1 )γ ` + (dF i α )(F −1 )α k σ kj
+ σ ik (dF j β )(F −1 )β k + σ ij ρ−1 dρ − ρθγ ij dη,
θ
dθ = −θγ ij (dFiγ )(F −1 )γ j +
dη,
cE
(4.14)
(4.15)
(4.16)
(4.17)
where the adiabatic elasticity tensor c ijk` is defined to be
c ijk` := cθijk` + ρcE θγ ij γ k` .
(4.18)
4.3. Incremental form. We now derive the exact incremental form of the constitutive relations. We assume that the flow is smooth. (The following manipulations are not applicable in
the presence of discontinuities.) As is well-known, Eqs. (1.1) and (1.2) follow from Eqs. (3.9)
and (3.10), and these equations together with Eq. (3.11) imply that
ρε̇ − σ ij vi;j = 0.
(4.19)
8
B. PLOHR AND J. PLOHR
Furthermore, by Eq. (3.12), (g α i );t + v j g α j;i + g α j v j ;i = 0; using Eq. (3.13), the second term
in this equation becomes v j g α i;j , so that
In other words,
In particular,
ġ α i + g α j v j ;i = 0.
(4.20)
¡
¢α
¡ ¢j
Ḟ j α F −1 i = − g −1 α ġ α i = v j ;i .
(4.21)
¡
¢α
v k ;k = Ḟ k α F −1 k = J −1 J˙ = −ρ−1 ρ̇.
(4.22)
In Eq. (4.8), interpret the differential as the convective time derivative and use Eq. (4.21):
ρε̇ = σ ij vj;i + ρθη̇.
(4.23)
Comparing this result to Eq. (4.19), we find that
η̇ = 0,
(4.24)
i.e., the specific entropy is constant along particle paths. (More generally, ρθη̇ equals the
dissipation, such as that associated with internal variables, minus the divergence of the heat
flux vector plus the heat supply per unit spatial volume.) Therefore
ρε̇ = σ ij dij ,
(4.25)
where dij = 12 (vi;j + vj;i ) is the rate of deformation tensor. Similarly, Eqs. (4.16) and (4.17)
become
σ̇ ij − v i ;k σ kj − σ ik v j ;k + σ ij tr d = c ijk` dk` ,
ij
θ̇ = −θγ dij .
(4.26)
(4.27)
The quantity on the left-hand side of Eq. (4.26) is known as the Truesdell objective stress
rate [20].
An alternative form of Eq. (4.26) is
σ̇ ij − ω i k σ kj − σ ik ω j k = bijk` dk` ,
where ωij := 12 (vi;j − vj;i ) is the vorticity tensor, so that vi;j = dij + ωij , and
¡
¢
bijk` := c ijk` + 12 σ ik δ j` + σ i` δ jk + σ jk δ i` + σ j` δ ik − σ ij δ k`
(4.28)
(4.29)
is the adiabatic Birch-Wallace elasticity tensor [1, 21]. Notice that this tensor does not have
the same complete symmetry that the tensor c ijk` has: in general, bk`ij 6= bijk` . The quantity
on the left-hand side of Eq. (4.28) is the Zaremba-Jaumann objective stress rate [22, 8].
4.4. Volumetric/shear strain decomposition. The incremental stress equation can be
decomposed into its volumetric and shear parts which correspond to the decomposition of
the Cauchy stress σ ij = −pδ ij + sij into the mean pressure p = − 31 tr σ and the stress
deviator sij = (dev σ)ij . To this end, let us introduce the following volumetric/shear strain
decomposition of a tensor Aijk` :
ijk`
ij k`
Aijk` = Av,v δ ij δ k` + δ ij Ak`
v,s + As,v δ + As,s ,
(4.30)
LARGE DEFORMATION ISOTROPIC THERMOELASTICITY
9
where
Av,v := 19 Am m n n ,
¡ m k` 1 m n k` ¢
1
Ak`
,
v,s := 3 A m − 3 A m n δ
¢
¡
ijn
1
1 m n ij
Aij
,
n − 3 A m nδ
s,v := 3 A
(4.31)
ijk`
− 13 δ ij Am m k` − 31 Aijn n δ k` + 19 Am m n n δ ij δ k` .
Aijk`
s,s := A
(4.34)
(4.32)
(4.33)
k`
ij k`
ijk`
The tensor bijk` decomposes as bijk` = Kδ ij δ k` +δ ij bv,s
+ bs,v
δ + bs,s
, where K := 19 bm m n n
ij
k`ij
ijk`
ij
6= bv,s
in general;
denotes the adiabatic bulk modulus. Because b
can differ from b , bs,v
ij
ij
− sij . By contrast, for the volumetric/shear decomposition of the tensor
= bv,s
in fact, bs,v
ij
ij
. The relationship between the decompositions of bijk` and c ijk` is as follows:
= cv,s
c ijk` , cs,v
K = cv,v + 31 p,
ijk`
bs,s
=
ijk`
cs,s
¡
(4.35)
k`
k`
bv,s
= cv,s
+ 23 sk` ,
ij
ij
bs,v
= cv,s
− 13 sij ,
¢
δ i` δ jk − 23 δ ij δ k`
¢
i` jk
jk i`
j` ik
ik j`
−p δ δ +
¡
+ 12 sik δ j` + s δ
+s δ +s δ
(4.36)
(4.37)
− 23 sij δ k` − 23 δ ij sk` .
(4.38)
Making use of the volumetric/shear decomposition of bijk` , we find that Eq. (4.28) is
equivalent to the pair of equations
ij
i
k`
−ṗ = K tr d + bv,s
(dev d)k` ,
(4.39)
kj
(4.40)
ik
ṡ − ω k s − s ω
j
k
=
ij
bs,v
tr d +
ijk`
bs,s
(dev d)k` ,
which should be compared with the equations (1.3) and (1.4) that are usually adopted.
Similarly, Eqs. (4.25) and (4.27) can be written
ρε̇ = −p tr d + sij (dev d)ij ,
(4.41)
θ̇ = −θΓ tr d − θγsij (dev d)ij ,
(4.42)
where Γ := 13 tr γ is the mean Grüneisen coefficient and γsij := (dev γ)ij is the deviatoric
Grüneisen tensor.
4.5. Acoustic speeds. The system of conservation laws (3.9)–(3.12) supplemented by the
constitutive relations (4.3)–(4.5) can be analyzed to determine the speeds of waves that
propagate in a given direction ni . Besides the modes that propagate at the speed nk v k of
particles, there are acoustic modes. Finding the speeds of the acoustic modes is accomplished
most easily by substituting a traveling wave Ansatz for v i and σ ij into Eqs. (1.2) and (4.26).
Letting ξ = nk xk − sn t and inserting the forms v i (x, t) = ṽ i (ξ) and σ ij (x, t) = σ̃ ij (ξ) into
these equations yields
−cn ρ(ṽ i )0 − (σ̃ ij )0 nj = 0,
ij 0
i 0
−cn (σ̃ ) − (ṽ ) nk σ
kj
ik
j 0
ij
k 0
− σ (ṽ ) nk + σ (ṽ ) nk = c
(4.43)
ijk`
0
(ṽk ) n` ,
(4.44)
where cn = sn − nk v k and a prime denotes differentiation with respect to ξ. Therefore
¢
¡
ρc2n (ṽ i )0 = nj c ijk` + δ ik σ j` n` (ṽk )0 ,
(4.45)
10
B. PLOHR AND J. PLOHR
i.e., (ṽ i )0 is an eigenvector, with eigenvalue ρc2n , of the acoustic matrix (an )i k := nj aij k ` n` ,
as defined in terms of the acoustic tensor aijk` := c ijk` + δ ik σ j` . The eigenvalues of (an )i k
typically form three families parameterized by the direction ni , each giving rise to two propagation velocities, sn = nk v k ± cn . For example, in a material that is nearly isotropic,
s,2
two families correspond to shear wave speeds cs,1
n and cn and the third corresponds to the
longitudinal wave speed cln .
5. Volumetric/Shear Strain Decomposition
Consider a material that can sustain only limited elastic shear strain but responds elastically to large changes in volume. For example, a ductile metal exhibits this feature because
plasticity limits the elastic shear strain to less than roughly the yield strength divided by
the shear modulus, about 1%. For such a material, it is useful to decompose the specific
free energy ψ as a sum of two parts: ψv , obtained by replacing Cαβ by its corresponding
volumetric part J 2/3 δαβ ; and the remaining part, ψs . We shall see that the stress associated
to the term ψv is spherical (i.e., proportional to the identity tensor), as in hydrodynamics,
and that the term ψs vanishes when there is no shear strain. We refer to ψ = ψv + ψs as the
volumetric/shear strain decomposition of ψ. The formulae in this section and the next do
not assume that the shear strain is small, but they suggest useful approximations that we
make in Sec. 7.
5.1. Shear strain. To distinguish the material response to volumetric and shear strain,
it is helpful to introduce the volume-preserving part F̄ i α := J −1/3 F i α of the deformation
gradient [4, 16], which satisfies det F̄ = 1. The corresponding right Cauchy-Green tensor is
C̄αβ := F̄kα F̄ k β = J −2/3 Cαβ , and the corresponding Lagrangian strain tensor is
Ēαβ := 12 (C̄αβ − δαβ ).
(5.1)
As det C̄ = 1, C̄αβ has only five independent components. Therefore the six components of
the tensor Cαβ can be replaced by J and C̄αβ . Equivalently, Eαβ can be replaced by τ and
Ēαβ , where τ := ρ−1 is the specific volume. As we demonstrate presently, the tensor Ēαβ is
a large-deformation generalization of the standard measure of shear strain in classical linear
elasticity theory. Therefore τ and Ēαβ represent a separation of the strain into its volumetric
and shear parts.
For the rest of this subsection, we assume that both the material and spatial coordinates are Cartesian, so that we can (a) identify material and spatial tensor indices and
(b) regard material and spatial positions as vectors that can be subtracted. Then we can
define uj (x, t) := xj − X̂ j (x, t), the particle displacement as a function of xi and t. Let
(∇u)j i := uj ;i = δ j i − g j i be its gradient. In linear elasticity theory, the displacement gradient is assumed to be small enough to justify the neglect of terms that are of second order
in this quantity. The infinitesimal strain tensor is defined to be εij := 12 (ui;j + uj;i ), and the
measure of shear strain is taken to be the infinitesimal strain deviator (dev ε)ij . (The tensor
εij should not be confused with the specific internal energy ε, which is a scalar.)
To relate (dev ε)αβ and Ēαβ , let us calculate using matrix notation. First notice that,
¢−1
¡
and g = I − ∇u,
because C = F T F = gg T
¤−1
¢
£
¡
(5.2)
I + 2E = I − ∇u − (∇u)T + (∇u)(∇u)T
= I + 2ε + O k∇uk2
LARGE DEFORMATION ISOTROPIC THERMOELASTICITY
11
as k∇uk → 0. (We define the norm kAk of a matrix A by kAk2 := tr(AT A).) Therefore
¢
¡
Eαβ = εαβ + O k∇uk2
(5.3)
as k∇uk → 0. Next notice that C̄ = exp[dev(ln C)], as follows from diagonalizing C.
Therefore I + 2Ē = exp{dev [2E + O(kEk2 )]} = I + 2 dev E + O(kEk2 ) as kEk → 0.
Consequently, Ē = dev E + O(k∇uk2 ) as k∇uk → 0, so that
Ēαβ = (dev ε)αβ + O(k∇uk2 )
(5.4)
as k∇uk → 0. Thus Ēαβ is a large-deformation generalization of (dev ε)αβ ; we refer to it as
the Lagrangian shear strain tensor.
Remark. In classical linear elasticity theory, the approximate relation ε̇ij ≈ dij is invoked to
show the equivalence of the incremental law σ̇ ij ≈ c ijk` dk` (cf. Eq. (4.26)) and Hooke’s law
σ ij ≈ c ijk` εk` . Note, however, that ε̇ij is not exactly the same as the rate of deformation
tensor dij = 12 (vi;j + vj;i ). In fact, (ui;j )· 6= (u̇i );j = vi;j because the convective derivative does
not commute with spatial derivatives; rather, Eq. (4.21) implies that (ui;j )· = vi;j − ui;k v k ;j .
¡
¢·
For this reason, c ijk` dk` 6= c ijk` εk` even if c ijk` is constant, and Eq. (4.26) does not lead to,
or follow from, the relation σ ij = c ijk` εk` even if the velocity gradient terms are negligible.
5.2. Decomposition of the free energy. The specific Helmholtz free energy ψ = ψ̂(E, θ)
determines the thermoelastic response of the material. There is a unique decomposition of
ψ of the form
ψ = ψv (τ, θ) + ψs (τ, Ē, θ)
(5.5)
such that ψs (τ, 0, θ) = 0. Indeed, if Ēαβ = 0, then Cαβ = J 2/3 δαβ , so that Eαβ is determined
by τ ; and in this case, Eq. (5.5) implies that ψv (τ, θ) = ψ̂(E, θ).
Remark. The thermoelastic response is likewise determined by ε = ε̌(E, η). However,
the direct analog for the specific internal energy of the decomposition (5.5), viz., ε =
ε̌v (τ, η) + ε̌s (τ, Ē, η), is inappropriate because it would imply that the temperature (which
is an intensive thermodynamic quantity), rather than the entropy (which is extensive), is a
sum of contributions. This important point has been emphasized to us by R. Menikoff [11].
5.3. Decompositions of first derivatives of the free energy. The dependence of ψ on
τ leads to a volumetric force (i.e., a hydrodynamic pressure) and its dependence on Ēαβ
leads to deviatoric (i.e., shear) force, as we now show.
To calculate the Cauchy stress from Eq. (4.3), we note that
¯
¯
∂ψ
∂ψ ¯¯ ∂J
∂ψ ¯¯ ∂ Ēµν
=
+
.
(5.6)
∂Eαβ
∂J ¯Ē ∂Eαβ
∂ Ēµν ¯J ∂Eαβ
(In this equation, ∂ψ/∂ Ēαβ must be calculated as if Ēαβ had six independent components,
i.e., before invoking the constraint det(I + 2Ē) = 1.) Therefore we need the following
formulae [16, p. 358]:
J 2/3
∂ Ēµν
∂Eαβ
∂J
= J (C −1 )αβ ,
∂Eαβ
¢
¡
= 12 δ α µ δ β ν + δ α ν δ β µ − 13 (C −1 )αβ Cµν .
(5.7)
(5.8)
12
B. PLOHR AND J. PLOHR
The tensor (5.8) is the projector onto Lagrangian tensors having vanishing contraction with
Cαβ . As a result,
∂J j
F β = Jδ ij ,
∂Eαβ
¯
µ
¶ij
∂ Ēµν j
∂ψ ¯¯
T
F β = dev F̄
F̄
.
∂Eαβ
∂ Ē ¯J
F iα
F
i
α
¯
∂ψ ¯¯
∂ Ēµν ¯J
(5.9)
(5.10)
Thus Eqs. (4.3) and (5.5) imply that the Cauchy stress σ ij takes the form
σ ij = −p δ ij + sij ,
where the mean pressure p =
− 13
(5.11)
tr σ is decomposed as
p := pv (τ, θ) + ps (τ, Ē, θ)
with
pv := −
∂ψv
∂ψs
and ps := −
,
∂τ
∂τ
and the deviatoric part of the stress, sij = (dev σ)ij , is
µ
¶ij
∂ψs T
ij
ij
s = σs := ρ dev F̄
F̄
.
∂ Ē
(5.12)
(5.13)
The volumetric free energy ψv contributes only the pressure pv , whereas the shear free energy
ψs generates the deviatoric part of the stress tensor along with the pressure ps .
Similarly, the specific entropy, given by Eq. (4.4), is decomposed as
∂ψv
∂ψs
and ηs := −
.
(5.14)
∂θ
∂θ
The specific internal energy, if it is regarded as a function of (E, θ), has the decomposition
η = ηv (τ, θ) + ηs (τ, Ē, θ) with ηv := −
ε = εv (τ, θ) + εs (τ, Ē, θ) with εv := ψv + θηv and εs := ψs + θηs .
(5.15)
Remark. If ε is regarded as a function of (E, η), a decomposition for ε is found by solving
Eq. (5.14)1 for θ as a function of (τ, Ē, η) and substituting for θ in Eq. (5.15)1 . The result,
however, is generally not a volumetric/shear strain decomposition for ε̌(E, η). For example,
consider the special situation that ∂ 2 ψs /∂θ2 = 0. Then ηs = −∂ψs /∂θ and εs = ψs −θ ∂ψs /∂θ
are independent of θ, and so we can omit their θ arguments. If we denote the solution of
η 0 = ηv (τ, θ) by θ = θ̌v (τ, η 0 ), the solution of Eq. (5.14)1 is simply θ = θ̌v (τ, η − ηs (τ, Ē)). In
this situation, the resulting formula for ε̌(E, η) is
ε̌(E, η) = εv (τ, θ̌v (τ, η − ηs (τ, Ē))) + εs (τ, Ē).
(5.16)
The first term in this decomposition in general exhibits dependence on Ēαβ .
5.4. Decompositions of second derivatives of the free energy. The decomposition of
ψ into volumetric and shear terms also entails decompositions of the quantities defined by
Eqs. (4.11)–(4.13) and (4.18). First, from Eq. (4.13) we derive that
cE = cE,v (τ, θ) + cE,s (τ, Ē, θ) with cE,v := −θ
∂ 2 ψs
∂ 2 ψv
and
c
:=
−θ
.
E,s
∂θ2
∂θ2
(5.17)
Next, notice that Eqs. (4.3) and (4.12) imply that
¯
∂σ ij ¯¯
.
− ρcE γ =
∂θ ¯E
ij
(5.18)
LARGE DEFORMATION ISOTROPIC THERMOELASTICITY
13
Therefore the Grüneisen tensor is
γ ij = Γδ ij + γsij ,
where the mean Grüneisen coefficient Γ =
1
3
(5.19)
tr γ is decomposed through
cE Γ := cE,v (τ, θ)Γv (τ, θ) + cE (τ, Ē, θ)Γs (τ, Ē, θ),
(5.20)
with
Γv :=
τ ∂pv
cE,v ∂θ
and
Γs :=
τ ∂ps
,
cE ∂θ
(5.21)
and the deviatoric part of the Grüneisen coefficient is
γsij
τ ∂σsij
:= −
.
cE ∂θ
(5.22)
Finally, we calculate that
¯
¯
µ
¶
∂
∂ψ ¯¯ ∂J
∂ψ ¯¯ ∂ Ēµν
∂ 2ψ
=
+
∂Eαβ ∂Eγδ
∂Eαβ ∂J ¯Ē ∂Eγδ
∂ Ēµν ¯J ∂Eγδ
¯
∂ 2 ψ ¯¯ ∂J ∂J
∂ 2 ψ ∂ Ēµν ∂J
=
+
∂J 2 ¯Ē ∂Eαβ ∂Eγδ ∂ Ēµν ∂J ∂Eαβ ∂Eγδ
¯
∂ψ ¯¯
∂J
∂ 2 ψ ∂ Ēµν
∂2J
+
+
∂J ¯Ē ∂Eαβ ∂Eγδ ∂Eαβ ∂J∂ Ēµν ∂Eγδ
¯
¯
∂ Ēµν
∂ 2 ψ ¯¯ ∂ Ēρσ
∂ψ ¯¯
∂ 2 Ēµν
+
+
.
∂Eαβ ∂ Ēµν ∂ Ēρσ ¯J ∂Eγδ
∂ Ēµν ¯J ∂Eαβ ∂Eγδ
(5.23)
Equations (5.7) and (5.8) imply that
£
¤
∂ 2J
= −J (C −1 )αγ (C −1 )βδ + (C −1 )αδ (C −1 )βγ − (C −1 )αβ (C −1 )γδ ,
∂Eαβ ∂Eγδ
∂ 2 Ēµν
J 2/3
∂Eαβ ∂Eγδ
¡
¢
¡
¢
= − 31 (C −1 )αβ δ γ µ δ δ ν + δ γ ν δ δ µ − 13 δ α µ δ β ν + δ α ν δ β µ (C −1 )γδ
£
¤
+ 31 Cµν (C −1 )αγ (C −1 )βδ + (C −1 )αδ (C −1 )βγ + 32 (C −1 )αβ (C −1 )γδ .
(5.24)
(5.25)
Therefore
¡
¢
∂2J
F k γ F ` δ = −J δ ik δ j` + δ i` δ jk − δ ij δ k` ,
∂Eαβ ∂Eγδ
¯
∂ 2 Ēµν
∂ψ ¯¯
F k γ F `δ
∂ Ēµν ¯J ∂Eαβ ∂Eγδ
¯
¯
¶k`
¶ij
µ
µ
∂ψ ¯¯
∂ψ ¯¯
T
T
2
2 ij
F̄
− 3 dev F̄
F̄
δ k`
= − 3 δ dev F̄
∂ Ē ¯J
∂ Ē ¯J
¯
¶
µ
¡ ik j`
¢
∂ψ ¯¯
T
i` jk
1
2 ij k`
+ 3 tr F̄
F̄
δ
δ
+
δ
δ
−
δ
δ
.
3
∂ Ē ¯J
F iαF j β
F iαF j β
(5.26)
(5.27)
14
B. PLOHR AND J. PLOHR
Also, by Eq. (5.10),
¯
∂ Ēµν
∂ 2 ψ ¯¯ ∂ Ēρσ k `
F αF β
F γF δ
∂Eαβ ∂ Ēµν ∂ Ēρσ ¯J ∂Eγδ
µ
= F̄ ⊗ F̄ :
i
j
¯
¶ijk`
∂ 2 ψ ¯¯
T
T
: F̄ ⊗ F̄
.
∂ Ē∂ Ē ¯J
s,s
(5.28)
Combining these formulae with Eqs. (4.11) and (4.18) shows that the adiabatic elasticity
tensor is
ij k`
k`
ijk`
c ijk` = (K − 31 p)δ ij δ k` + cv,s
δ + δ ij cv,s
+ cs,s
,
(5.29)
where
µ
¶ij
∂ 2 ψs T
ij
2 ij
cv,s := − 3 s + dev F̄
F̄
+ ρcE θΓγsij ,
(5.30)
∂τ ∂ Ē
·
µ
¶
¸
¡
¢
∂ψ
s
ijk`
T
cs,s := 13 ρ tr F̄
F̄
+ p δ ik δ j` + δ i` δ jk − 23 δ ij δ k`
∂ Ē
(5.31)
µ
¶ijk`
∂ 2 ψs
T
T
ij k`
+ ρ F̄ ⊗ F̄ :
: F̄ ⊗ F̄
+ ρcE θγs γs .
∂ Ē∂ Ē
s,s
Here the adiabatic bulk modulus K is decomposed as
K := Kv (τ, θ) + Ks (τ, Ē, θ)
(5.32)
with
Kv := −τ
∂pv
+ ρcE,v θΓ2v
∂τ
and
Ks := −τ
¡
¢
∂ps
+ ρθ cE Γ2 − cE,v Γ2v .
∂τ
(5.33)
5.5. Alternate thermodynamic variables. In the context of compressible gas dynamics,
p is commonly used as a flow variable in place of θ. The specific internal energy is thereby
expressed in terms of τ and p, a relation called the incomplete equation of state [12]. (This
relation contains less information than does ε expressed as a function of τ and η, in that the
temperature and entropy are determined only up to an arbitrary function.) In the present
context, it is easier to replace θ by the volumetric pressure p0 rather than the mean pressure
p. To this end we solve the relation p0 = pv (τ, θ) to get θ = θ̄v (τ, p0 ), and then substitute for θ
in the various functions of (τ, Ē, θ) (viz., ψv , ψs , εv , etc.), obtaining corresponding functions
of (τ, Ē, p0 ).
6. Isotropic Constitutive Relations
Now we assume that the thermoelastic material response is isotropic in the chosen reference
configuration, so that ψ depends on Eαβ solely through the three principal invariants ι1 (C),
ι2 (C), and ι3 (C) of the right Cauchy-Green tensor Cαβ . (Here, the principal invariants of
a 3 × 3 matrix A are defined so that det(−λI + A) = −λ3 + ι1 (A)λ2 − ι2 (A)λ + ι3 (A).
Explicitly,
ι1 (A) := tr A,
£
¡ ¢¤
ι2 (A) := 12 (tr A)2 − tr A2 ,
(6.1)
ι3 (A) := det A.
(6.3)
(6.2)
LARGE DEFORMATION ISOTROPIC THERMOELASTICITY
15
The Cayley-Hamilton theorem says that −A3 + ι1 (A)A2 − ι2 (A)A + ι3 (A)I = 0. In particular, it follows that ι2 (A) = (det A) tr(A−1 ) if A is invertible.) An equivalent assumption
is that ψs depends on Ēαβ solely through the two principal invariants
I¯1 := tr C̄,
I¯2 := tr(C̄ −1 ).
(6.4)
(6.5)
(Notice that I¯1 = ι1 (C̄), and that I¯2 = ι2 (C̄) because det C̄ = 1. Also, the third invariant
is trivial: ι3 (C̄) = 1.) Therefore we write ψs (τ, Ē, θ) := ψ̆s (τ, I¯1 , I¯2 , θ).
6.1. Shear strain. To understand the meaning of the invariants I¯1 and I¯2 , let us relate
them to the infinitesimal strain tensor used in linear elasticity theory. Noting the identity
1 = det C̄ = det(I + 2Ē) = 1 + 2ι1 (Ē) + 4ι2 (Ē) + 8ι3 (Ē),
(6.6)
we find that tr Ē + (tr Ē)2 − kĒk2 + 4 det Ē = 0. Because tr Ē = O(kĒk) (at least) and
det Ē = O(kĒk3 ) as kĒk → 0, this equality implies that tr Ē = O(kĒk2 ) as kĒk → 0.
Consequently,
1 ¯
(I − 3) = tr Ē = kĒk2 + O(kĒk3 )
(6.7)
2 1
as kĒk → 0. Moreover, the identity 8 det Ē = det(−I + C̄) = −1 + ι1 (C̄) − ι2 (C̄) + ι3 (C̄)
shows that I¯1 − I¯2 = 8 det Ē, so that
1 ¯
(I
2 2
− 3) = kĒk2 + O(kĒk3 )
(6.8)
as kĒk → 0. In particular, Eq. (5.4) implies that 12 (I¯1 − 3) and 21 (I¯2 − 3) both equal
kdev εk2 + O(k∇uk3 ) as k∇uk → 0, with kdev εk being the usual isotropic measure of shear
strain in linear elasticity theory.
The foregoing results suggest introducing the quantities ²1 ≥ 0 and ²2 ≥ 0 defined by
²2a := 12 (I¯a − 3),
a = 1, 2.
(6.9)
The small shear strain regime is defined by the following equivalent assumptions: kĒk ¿ 1,
or ²1 ¿ 1, or ²2 ¿ 1. In contrast, the linearized regime is defined by k∇uk ¿ 1. By
Eq. (5.4), kĒk = O(k∇uk); but as the example of F i α being a nontrivial rotation shows,
k∇uk 6= O(kĒk). In other words, the small shear strain regime is broader than the linearized
regime.
6.2. Deviatoric stress. To compute the deviatoric stress, first note that
∂ ψ̆s ∂ I¯1
∂ ψ̆s ∂ I¯2
∂ψs
= ¯
+ ¯
.
∂ Ēαβ
∂ I1 ∂ Ēαβ
∂ I2 ∂ Ēαβ
(6.10)
By definition of I¯1 and I¯2 ,
∂ I¯1
= 2δ αβ ,
∂ Ēαβ
∂ I¯2
= −2(C̄ −2 )αβ .
∂ Ēαβ
(6.11)
(6.12)
16
B. PLOHR AND J. PLOHR
Therefore
∂ I¯1 j
F̄ β = 2b̄ij ,
∂ Ēαβ
∂ I¯2 j
F̄ i α
F̄ β = −2(b̄−1 )ij ,
∂ Ēαβ
F̄ i α
(6.13)
(6.14)
where b̄ij := F̄ i γ F̄ jγ = J −2/3 bij denotes the volume-preserving part of the left Cauchy-Green
tensor bij := F i γ F j γ . Observe that tr b̄ = I¯1 and tr(b̄−1 ) = I¯2 .
Remark. Equalities relying on the constraint det C̄ = 1 cannot be invoked prior to calculating
derivatives with respect to Ēαβ . For example, I¯2 = ι2 (C̄) because det C̄ = 1, but when we
are treating Ēαβ as if it had six independent components, ∂ I¯2 /∂ Ēαβ 6= ∂ι2 (C̄)/∂ Ēαβ .
By Eq. (5.13) and Eqs. (6.13)–(6.14), the deviatoric part of the Cauchy stress tensor is
∂ ψ̆s
∂ ψ̆s
sij = 2ρ ¯ (dev b̄)ij − 2ρ ¯ [dev(b̄−1 )]ij .
∂ I1
∂ I2
(6.15)
To see the significance of the tensors (dev b̄)ij and [dev(b̄−1 )]ij appearing here, notice that
b̄ = exp[dev(ln b)], as follows from diagonalizing b, and that
£
¤−1
b = (g T g)−1 = I − ∇u − (∇u)T + (∇u)T (∇u)
= I + 2ε + O(k∇uk2 )
(6.16)
as k∇uk → 0. Consequently, b̄ = exp [2 dev ε + O(k∇uk2 )] = I + 2 dev ε + O(k∇uk2 ) as
k∇uk → 0, so that
1
(dev b̄)ij
2
−1 ij
− 12 [dev(b̄
= (dev ε)ij + O(k∇uk2 ),
ij
2
)] = (dev ε) + O(k∇uk )
(6.17)
(6.18)
as k∇uk → 0. Thus these tensors generalize the infinitesimal strain deviator of linear
elasticity theory. Also notice that kdev b̄k = kdev C̄k = 2kdev Ēk and kdev(b̄−1 )k =
kdev(C̄ −1 )k = 2kdev Ēk + O(kĒk2 ) as kĒk → 0.
This identification motivates introducing the coefficients
∂ ψ̆s
Ğa (τ, I¯1 , I¯2 , θ) := 2ρ ¯ ,
∂ Ia
a = 1, 2;
(6.19)
then the deviatoric stress (6.15) is
sij = Ğ1 (dev b̄)ij − Ğ2 [dev(b̄−1 )]ij .
(6.20)
By Eqs. (6.17) and (6.18), sij = 2(Ğ1 + Ğ2 )(dev ε)ij + O(k∇uk2 ), so that Ğ1 + Ğ2 can be
regarded as the shear modulus.
In this notation, the deviatoric part of the Grüneisen coefficient, as given by Eq. (5.22), is
#
"
τ
∂
Ğ
∂
Ğ
2
1
(6.21)
(dev b̄)ij −
[dev(b̄−1 )]ij .
γsij = −
cE ∂θ
∂θ
LARGE DEFORMATION ISOTROPIC THERMOELASTICITY
17
ij
6.3. Elasticity tensor. By Eq. (5.30), the portion cv,s
of the adiabatic elasticity tensor is
∂ 2 ψ̆s
∂ 2 ψ̆s
ij
(dev
b̄)
−
2
[dev(b̄−1 )]ij + ρcE θΓγsij .
∂τ ∂ I¯1
∂τ ∂ I¯2
(6.22)
ij
cv,s
= ζ̆1 (dev b̄)ij − ζ̆2 [dev(b̄−1 )]ij ,
(6.23)
ij
cv,s
= − 32 sij + 2
In other words,
where
ijk`
The part cs,s
2
∂(τ Ğa )
∂ Ğa
ζ̆a := − Ğa +
− Γθ
,
a = 1, 2.
3
∂τ
∂θ
defined by Eq. (5.31) involves
Ã
!
∂
∂ ψ̆s ∂ I¯1
∂ ψ̆s ∂ I¯2
∂ 2 ψs
=
+ ¯
∂ Ēαβ ∂ Ēγδ
∂ Ēαβ ∂ I¯1 ∂ Ēγδ
∂ I2 ∂ Ēγδ
(6.24)
∂ 2 ψ̆s ∂ I¯1 ∂ I¯1
∂ 2 ψ̆s ∂ I¯2 ∂ I¯1
= ¯2
+
∂ I1 ∂ Ēαβ ∂ Ēγδ ∂ I¯2 ∂ I¯1 ∂ Ēαβ ∂ Ēγδ
∂ ψ̆s ∂ 2 I¯1
∂ 2 ψ̆s ∂ I¯1 ∂ I¯2
+ ¯
+ ¯ ¯
∂ I1 ∂ Ēαβ ∂ Ēγδ ∂ I1 ∂ I2 ∂ Ēαβ ∂ Ēγδ
+
(6.25)
∂ ψ̆s ∂ 2 I¯2
∂ 2 ψ̆s ∂ I¯2 ∂ I¯2
+
.
∂ I¯22 ∂ Ēαβ ∂ Ēγδ
∂ I¯2 ∂ Ēαβ ∂ Ēγδ
By Eqs. (6.11) and (6.12),
∂ 2 I¯1
= 0,
∂ Ēαβ ∂ Ēγδ
(6.26)
h
∂ 2 I¯2
= 2 (C̄ −1 )αγ (C̄ −2 )βδ + (C̄ −1 )αδ (C̄ −2 )βγ
∂ Ēαβ ∂ Ēγδ
+ (C̄
Therefore
µ
−2 αγ
) (C̄
−1 βδ
)
+ (C̄
−2 αδ
) (C̄
−1 βγ
)
(6.27)
i
.
¶ijk`
∂ 2 I¯2
F̄ ⊗ F̄ :
: F̄ ⊗ F̄
∂ Ē∂ Ē
h
i
= 2 δ ik (b̄−1 )j` + δ i` (b̄−1 )jk + (b̄−1 )ik δ j` + (b̄−1 )i` δ jk .
(6.28)
For any two matrices A and B, let us define the tensor
ijk`
IA,B
:= 14 (Aik B j` + Ai` B jk + B ik Aj` + B i` Ajk ).
Then by writing (b̄−1 )ij = 31 I¯2 δ ij + [dev(b̄−1 )]ij , we see that
µ
¶ijk`
¡
¢
∂ 2 I¯2
ijk`
F̄ ⊗ F̄ :
.
: F̄ ⊗ F̄
= 34 I¯2 δ ik δ j` + δ i` δ jk + 8II,dev(
b̄−1 )
∂ Ē∂ Ē
Also, by Eqs. (6.14) and (6.14),
¶
µ
∂ψs T
∂ ψ̆s
∂ ψ̆s
F̄
= 2I¯1 ¯ − 2I¯2 ¯ .
tr F̄
∂ I1
∂ I2
∂ Ē
(6.29)
(6.30)
(6.31)
18
B. PLOHR AND J. PLOHR
Combining the foregoing formulae with Eq. (5.31), we obtain
"
ijk`
cs,s
=
2
X
¡
#
¢
¡
¢
1 + 23 ²2a Ğa + p δ ik δ j` + δ i` δ jk − 23 δ ij δ k`
a=1
¡
¢ijk`
∂ Ğ1
+ 4Ğ2 II,dev(b̄−1 ) s,s + 2 ¯ (dev b̄)ij (dev b̄)k`
∂ I1
ª
∂ Ğ2 ©
− 2 ¯ [dev(b̄−1 )]ij (dev b̄)k` + (dev b̄)ij [dev(b̄−1 )]k`
∂ I1
∂ Ğ2
+ 2 ¯ [dev(b̄−1 )]ij [dev(b̄−1 )]k` + ρcE θγsij γsk` .
∂ I2
(6.32)
7. Small Shear Strain
As we saw in Sec. 6.1, the invariants ²2a = 21 (I¯a − 3), a = 1, 2, both equal kĒk2 + O(kĒk3 ).
In this section, we suppose that the shear strain Ēαβ is small and that we can expand the
shear contribution to the specific Helmholtz free energy in a Taylor series around I¯1 = 3,
I¯2 = 3, i.e., in powers of ²21 and ²22 . By definition (6.19),
ψ = ψv (τ, θ) +
2
X
τ Ga (τ, θ) ²2a + O(kĒk4 ),
(7.1)
a=1
where Ga (τ, θ) := Ğa (τ, 3, 3, θ), a = 1, 2. Neglecting terms of order kĒk4 , we obtain the
small shear strain model, for which the shear contribution to the free energy has the form
ψ̆s (τ, I¯1 , I¯2 , θ) :=
2
X
τ Ga (τ, θ) ²2a .
(7.2)
a=1
For incompressible, isothermal materials, this model coincides with that of Mooney [13]. The
quantity Gv := G1 + G2 can be regarded as the shear modulus. The dimensionless quantity
α := (G1 − G2 )/(G1 + G2 ) is called the coefficient of asymmetry [13]: if α = 0, the shear
of a deformation with b̄ = b̄0 is the negative of that with b̄ = b̄−1
0 . In terms of Gv and α,
G1 = 21 (1 + α)Gv and G2 = 12 (1 − α)Gv .
Remark. Various models are available for the shear modulus Gv = G1 + G2 . For instance,
in the model of Steinberg et al. [18],
£
¤
Gv (τ, θ) := G0 1 + Gp (ρ0 τ )1/3 pv (τ, θ) + Gθ (θ − θ0 ) ,
(7.3)
where G0 , Gp , and Gθ are additional material constants. (For simplicity, we have interpreted
the pressure appearing in this model as the volumetric pressure pv .) Values for the coefficient
of asymmetry α for rubber are given in Ref. [13].
LARGE DEFORMATION ISOTROPIC THERMOELASTICITY
19
The shear contributions to the mean pressure, deviatoric stress, specific entropy, and
specific internal energy, as determined by Eqs. (5.12)–(5.15), are
ps = −
2
X
∂(τ Ga )
∂τ
a=1
ij
²2a ,
(7.4)
σsij = G1 (dev b̄) − G2 [dev(b̄−1 )]ij ,
ηs = −τ
εs = τ
2 µ
X
a=1
2
X
∂Ga
∂θ
a=1
²2a ,
∂Ga
Ga − θ
∂θ
(7.5)
(7.6)
¶
²2a ,
(7.7)
respectively, and the shear contributions to the specific heat and Grüneisen tensor, defined
by Eqs. (5.17), (5.21), and (5.22), are
cE,s = −τ θ
2
X
∂ 2 Ga
a=1
Γs = −
γsij
τ
cE
2
X
a=1
∂θ2
²2a ,
(7.8)
∂ 2 (τ Ga ) 2
² ,
∂τ ∂θ a
(7.9)
¸
·
τ ∂G1
∂G2
ij
−1 ij
=−
(dev b̄) −
[dev(b̄ )] .
cE ∂θ
∂θ
(7.10)
By Eq. (5.33), the shear contribution to the adiabatic bulk modulus is
Ks = τ
2
X
∂ 2 (τ Ga )
a=1
∂τ 2
¡
¢
²2a + ρθ cE Γ2 − cE,v Γ2v ;
(7.11)
notice that the second term of Ks is of order kĒk2 . Equations (6.23) and (6.24) say that
ij
cv,s
= ζ1 (dev b̄)ij − ζ2 [dev(b̄−1 )]ij ,
(7.12)
where
1
∂Ga
∂Ga
ζa := Ga + τ
− Γθ
,
3
∂τ
∂θ
a = 1, 2.
(7.13)
Finally, Eq. (6.32) implies that
ijk`
=
cs,s
" 2
X¡
a=1
#
¢
¢
¡
1 + 23 ²2a Ga + p δ ik δ j` + δ i` δ jk − 23 δ ij δ k`
¡
+ 4G2 II,dev(b̄−1 )
¢ijk`
s,s
+ ρcE θγsij γsk` .
(7.14)
20
B. PLOHR AND J. PLOHR
In these terms, the volumetric/shear strain parts of the tensor bijk` are
bv,v = K,
k`
bv,s
ij
bs,v
ijk`
bs,s
=
=
k`
cv,s
ij
cv,s
+
−
(7.15)
2 k`
s ,
3
1 ij
s ,
3
(7.16)
(7.17)
2
X
¡
¢
¡
¢
=
1 + 32 ²2a Ga δ ik δ j` + δ i` δ jk − 23 δ ij δ k`
a=1
¡
¢ijk`
+ 4G2 II,dev(b̄−1 ) s,s + ρcE θγsij γsk`
¡
¢
+ 12 sik δ j` + si` δ jk + sjk δ i` + sj` δ ik − 23 sij δ k` − 23 δ ij sk` .
(7.18)
Also, the acoustic matrix (an )ik = nj (c ijk` + δ ik σ j` )n` is
#
"
#
"
2
2
X
X
2
i
k
2
2
j`
ik
(1 + 23 ²a )Ga n n + |n|
(1 + 32 ²a )Ga + nj s n` δ ik
(an ) = K + 13
£
a=1
ij
k
i
k`
¤
a=1
+ ζ1 (dev b̄) nj n + n (dev b̄) n`
©
ª
− ζ2 [dev(b̄−1 )]ij nj nk + ni [dev(b̄−1 )]k` n`
¡
¢ijk`
+ 4G2 Ib,dev(b̄−1 ) s,s nj n` + ρcE θγsij nj γsk` n` .
(7.19)
Remark. In writing Eq. (7.2), we have neglected quadratic terms in 21 (I¯1 − 3) and 21 (I¯2 − 3).
If we reinstated such terms, they would give rise to terms of order kĒk4 in ps , ηs , εs , cE,s ,
ij
ijk`
Γs , and Ks , terms of order kĒk3 in sij , γsij , and cv,s
, and terms of order kĒk2 in cs,s
and
ijk`
ik
2
(an ) . Terms of same order kĒk appear in formulae (7.14) and (7.19) for cs,s and (an )ik .
Nonetheless, these terms must be retained to maintain thermodynamic consistency of the
constitutive model.
If the state of deformation is spherical, meaning that F i α = J 1/3 δ i α , then (dev b̄)ij = 0 =
ij
[dev(b̄−1 )]ij and ²1 = 0 = ²2 , so that ps , σsij , ηs , εs , cE,s , Γs , γsij , Ks , and cv,s
all vanish and
the adiabatic elasticity tensor reduces to the classical linear elastic form
¡
¢
c ijk` = λδ ij δ k` + µ δ ik δ j` + δ i` δ jk
(7.20)
in terms of the Lamé moduli, λ = Kv − 23 Gv − pv and µ = Gv + pv . Moreover, the acoustic
matrix (an )ik := nj (c ijk` + δ ik σ j` )n` is
¢
¡
(7.21)
(an )ik = Kv + 31 Gv ni nk + |n|2 Gv δ ik ,
so that (if |n| = 1) the eigenvalues of the acoustic matrix are given by the classical formulae:
ρ(cs )2 := Gv (with multiplicity two) for shear waves and ρ(cl )2 := Kv + 43 Gv for longitudinal
waves.
8. Comparison
Let us compare the isotropic, thermoelastic constitutive model of the preceding section,
which is exact modulo terms in the free energy of fourth order in the shear strain, to standard
constitutive models.
LARGE DEFORMATION ISOTROPIC THERMOELASTICITY
21
8.1. Standard constitutive models. Equations (1.3)–(1.4),
−ṗ = K tr d,
(1.3)
ṡij = 2G (dev d)ij ,
(1.4)
are often adopted as the constitutive model for an isotropic material. They differ from the
isotropic, thermoelastic incremental equations (4.39)–(4.40),
k`
−ṗ = K tr d + bv,s
(dev d)k` ,
(4.39)
ijk`
ij
(dev d)k` ,
tr d + bs,s
ṡij − ω i k skj − sik ω j k = bs,v
(4.40)
in that they omit the following terms:
k`
(dev d)k` = O(Gv kĒkkdev dk),
bv,s
ij
bs,v
tr d = O(Gv kĒk|tr d|),
ijk`
bs,s
(dev d)k` − 2G (dev d)ij = O(Gv kĒkkdev dk),
ω i k skj + sik ω j k = O(Gv kĒkkωk).
(8.1)
(8.2)
(8.3)
(8.4)
(Here and in the following, we identify G as Gv .) The objective derivative terms (8.4) are well
known [22, 8], but the other terms (8.1)–(8.3) are new. For the approximate equations (1.3)–
(1.4) to be valid, the term (8.1) should be small compared to Kv |tr d| and the terms (8.2)–
(8.4) should be small compared to Gv kdev dk. Assuming that Gv 6= 0, the conditions for
neglecting these four terms are, respectively,
Kv
|tr d|,
Gv
kĒk |tr d| ¿ kdev dk,
kĒkkdev dk ¿
(8.5)
(8.6)
kĒk¿ 1,
(8.7)
kĒk kωk ¿ kdev dk.
(8.8)
Another common constitutive model adopts Eq. (1.3) and replaces ṡij on the left-hand
side of Eq. (1.4) by the Zaremba-Jaumann [22, 8] objective stress rate:
ṡij − ω i k skj − sik ω j k = 2G (dev d)ij .
(8.9)
In other words, the terms (8.1)–(8.3) are omitted from Eqs. (4.39)–(4.40) but the terms (8.4)
are retained.
A third constitutive model uses the Green-Naghdi-McInnis [6, 5] objective stress rate on
the left-hand side of Eq. (1.4), i.e.,
ṡij − wi k skj − sik wj k = 2G (dev d)ij .
(8.10)
Here the antisymmetric tensor wij is defined as follows: find the left polar decomposition of
the deformation gradient, namely tensors Ri α and Vij such that F i α = V i k Rk α , Vji = Vij ,
Vij v i v j ≥ 0 for all vectors v i , and Rkα Rk β = δαβ ; then let wij = Ṙiγ (R−1 )γ j . As in the
Zaremba-Jaumann model, the terms (8.1)–(8.3) are omitted from Eqs. (4.39)–(4.40), but
here the terms (8.4) are modified.
22
B. PLOHR AND J. PLOHR
8.2. Example. As an illustration of the differences among constitutive models, consider, as
an example, simple shear flow:
1 γ 0
F = 0 1 0 ,
(8.11)
0 0 1
√
where γ varies only with time. In this flow, ²1 = |γ|/ 2 = ²2 ,
2 2
1 2
γ
γ
0
γ
−γ
0
−
3
3
0 , dev(b̄−1 ) = −γ 32 γ 2
0 ,
dev b̄ = γ − 13 γ 2
(8.12)
1 2
1 2
0
0
−3γ
0
0 −3γ
and
0
d = 21 γ̇
0
0
0,
0
1
γ̇
2
0
0
0
ω = − 21 γ̇
0
1
γ̇
2
0
0
0
0,
0
w=
1
ω.
1 + γ 2 /4
(8.13)
Assuming, for simplicity, that G1 = 12 (1 + α)Gv and G2 = 21 (1 − α)Gv are constant, we
find that Eqs. (4.39) and (4.40) become
ṡ12
−ṗ = 31 Gv γ γ̇ + 23 γ̇s12 ,
¢
= 1 + 13 γ 2 Gv γ̇ + γ̇s22 + 16 (1 − α)Gv γ 2 γ̇,
¡
11
=
22
=
ṡ
ṡ
ṡ33 =
4
γ̇s12
3
− 23 γ̇s12
− 32 γ̇s12
−
−
+
1
(1
3
1
(1
3
2
(1
3
(8.14)
(8.15)
− α)Gv γ γ̇,
(8.16)
− α)Gv γ γ̇,
(8.17)
− α)Gv γ γ̇.
(8.18)
The initial condition is that p = 0 and sij = 0 when γ = 0. The solution of the initial-value
problem is
p = − 12 Gv γ 2 ,
(8.19)
s12 = Gv γ,
(8.20)
α+3
s11 =
Gv γ 2 ,
(8.21)
6
α−3
s22 =
Gv γ 2 ,
(8.22)
6
α
s33 = − Gv γ 2 ,
(8.23)
3
which, of course, is compatible with Eqs. (7.4) and (7.5).
Contrast this result with those for Eqs. (1.3) and (1.4) when the Zaremba-Jaumann [22, 8]
or Green-Naghdi-McInnis [6, 5] objective time derivative of sij replaces ṡij on the left-hand
side of Eq. (1.4). As shown in Ref. [3], the solution is
p = 0,
(8.24)
s12 = Gv sin γ,
s
11
(8.25)
22
= Gv (1 − cos γ) = −s ,
33
s
=0
(8.26)
(8.27)
LARGE DEFORMATION ISOTROPIC THERMOELASTICITY
23
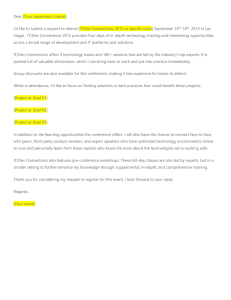
1.5
12
shear stress s /Gv
isotropic thermoelastic
Zaremba-Jaumann
Green-Naghdi-McInnis
1
0.5
0
0
0.2
0.4
0.8
0.6
shear strain ε
1
1.2
1.4
12
Figure 8.1. Comparison
√ of the nondimensional shear stress s /Gv plotted
vs. shear strain ² := |γ|/ 2 for (a) the isotropic, thermoelastic model, (b) the
model that uses the Zaremba-Jaumann stress rate, and (c) the model that uses
the Green-Naghdi-McInnis stress rate.
in the Zaremba-Jaumann case, and the solution is
p = 0,
(8.28)
s12 = 2Gv [(2β − tan β) cos(2β) − 2 ln(cos β) sin(2β)] ,
£
¤
s11 = 4Gv cos(2β) ln cos β + β sin(2β) − sin2 β = −s22 ,
(8.29)
s
33
= 0,
(8.30)
(8.31)
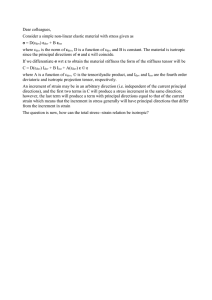
where tan β = γ/2, in the Green-Naghdi-McInnis case. Plots of the nondimensional shear
12
11
22
stress
√ s /Gv and first normal stress difference (s − s )/Gv vs. shear strain ² := ²1 = ²2 =
|γ|/ 2 for the three models are shown in Figs. 8.1 and 8.2.
In this example, the new terms (8.1) and (8.3) are comparable in size to the objective
derivative terms (8.4). (For simple shear flow, the term (8.2) happens to vanish.) The
objective derivative terms, or some replacement for them, are often found to be important
for the accuracy of flow simulations. If the objective derivative terms are important, then
omitting the new terms generally leads to inaccurate simulations.
9. Conclusions
We draw two conclusions from our calculations.
(1) The isotropic, thermoelastic incremental equations (4.39)–(4.40) contain not only the
well-known objective derivative terms (8.4) but also the new terms (8.1)–(8.3). As
24
B. PLOHR AND J. PLOHR
11 22
normal stress difference (s -s )/Gv
3
isotropic thermoelastic
Zaremba-Jaumann
Green-Naghdi-McInnis
2.5
2
1.5
1
0.5
0
0
0.2
0.4
0.6
0.8
shear strain ε
1
1.2
1.4
Figure 8.2. Comparison of the nondimensional√first normal stress difference
(s11 − s22 )/Gv plotted vs. shear strain ² := |γ|/ 2 for (a) the isotropic, thermoelastic model, (b) the model that uses the Zaremba-Jaumann stress rate,
and (c) the model that uses the Green-Naghdi-McInnis stress rate.
illustrated by the example of Sec. 8, neglecting the terms (8.1) and (8.3) can have
an effect comparable to omitting or modifying the objective derivative terms (8.4),
which, in certain flow regimes, can strongly influence the prediction of a constitutive
model. In general, we expect that neglecting any of the terms (8.1)–(8.4) leads to
significant errors in predictions for large-deformation flow.
(2) The new terms (8.1)–(8.3) involve the quantities ²1 , ²2 , (dev b̄)ij , and [dev(b̄−1 )]ij ,
which cannot be determined from sij . Consequently, unless these terms are omitted,
the governing equations in incremental form, namely Eqs. (1.1)–(1.2), (4.39)–(4.40),
and (4.42), do not constitute a closed system. This is because calculation of the
foregoing quantities requires knowledge of the deformation gradient. In contrast
to the incremental form, the conservation laws (3.9)–(3.12) supplemented by the
thermoelastic constitutive relations (4.3)–(4.5) do form a closed system.
Therefore, if a large-deformation flow problem is sensitive to the differences among objective stress rates, the new terms (8.1)–(8.3) must also be taken into account, and determining
these terms requires solving for the deformation gradient, such as by adopting the conservative form of the governing equations.
Acknowledgments
We thank Dr. Ralph Menikoff for his constructive comments on this work.
LARGE DEFORMATION ISOTROPIC THERMOELASTICITY
25
References
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
20.
21.
22.
F. Birch, Finite elastic strain of cubic crystals, Phys. Rev. 71 (1947), 809–824.
C. Dafermos, Hyperbolic conservation laws in continuum physics, Springer-Verlag, New York, 2000.
J. Dienes, On the analysis of rotation and stress rate in deforming bodies, Acta Mech. 32 (1979), 217–232.
R. Flory, Thermodynamic relations for highly elastic materials, Trans. Faraday Soc. 57 (1961), 829–838.
A. Green and B. McInnis, Generalized hypo-elasticity, Proc. Roy. Soc. Edinburgh A 57 (1967), 220–230.
A. Green and P. Naghdi, A general theory of an elastic-plastic continuum, Arch. Rational Mech. Anal.
18 (1965), 251–281.
A. Hanyga, Mathematical theory of non-linear elasticity, John Wiley & Sons, New York, 1985.
G. Jaumann, Geschlossenes System physikalischer und chemisher Differentialgesetze, Sitzber. Akad.
Wiss. Wien (IIa) 120 (1911), 385–530.
R. Lin, Numerical study of consistency of rate constitutive equations with elasticity at finite deformation,
Int. J. Num. Meth. in Engrg. 55 (2002), 1053–1077.
J. Marsden and T. Hughes, Mathematical foundations of elasticity, Prentice-Hall, 1983.
R. Menikoff, Notes on elastic-plastic flow, LANL report LA-UR-03-0047, Los Alamos National Laboratory, Los Alamos, NM, 2003.
R. Menikoff and B. Plohr, The Riemann problem for fluid flow of real materials, Rev. Mod. Phys. 61
(1989), 75–130.
M. Mooney, A theory of large elastic deformation, J. Appl. Phys. 11 (1940), 582–592.
B. Plohr and D. Sharp, A conservative Eulerian formulation of the equations for elastic flow, Adv. Appl.
Math. 9 (1988), 481–499.
J. Plohr and B. Plohr, Linearized analysis of Richtmyer–Meshkov flow for elastic materials, J. Fluid
Mech. 537 (2005), 55–89.
J. Simo and T. Hughes, Computational inelasticity, Springer-Verlag, New York–Heidelberg–Berlin, 1998.
J. Simo and K. Pister, Remarks on rate consitutive equations for finite deformation problems: Computational implications, Comput. Meth. Appl. Mech. Engrg. 46 (1984), 201–215.
D. Steinberg, S. Cochran, and M. Guinan, A constitutive model for metals applicable at high strain-rate,
J. Appl. Phys. 51 (1980), 1498–1504.
J. Trangenstein and P. Colella, A higher-order Godunov method for modeling finite deformation in
elastic-plastic solids, Comm. Pure Appl. Math. XLIV (1991), 41–100.
C. Truesdell, Hypo-elasticity, J. Rat. Mech. Anal. 4 (1955), 83–133, 1019–1020.
D. Wallace, Thermoelasticity of stressed materials and comparison of various elastic constants, Phys.
Rev. 162 (1967), 776.
S. Zaremba, Sur une forme perfectionnée de la théorie de la relaxation, Bull. Int. Acad. Sci. Cracovie
(1903), 594–6144.
Theoretical Division, Complex Systems Group, MS-B213, Los Alamos National Laboratory, Los Alamos, NM 87544
E-mail address: plohr@lanl.gov
Theoretical Division, Equations of State & Mechanics of Materials Group, MS-B221, Los
Alamos National Laboratory, Los Alamos, NM 87544
E-mail address: jplohr@lanl.gov