Junior Honours - Experimental Physics Electromechanical Resonance
advertisement

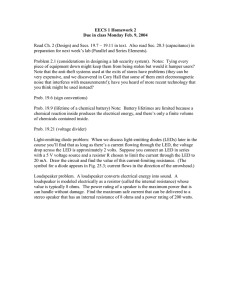
Junior Honours - Experimental Physics Electromechanical Resonance 1 Objectives • Measure the complex impedance Z of a loudspeaker as a function of frequency; observe resonance(s) • Determine values for the loudspeaker parameters Re , Le , T, Rm , Lm and Cm 2 Introduction If a loudspeaker coil is prevented from moving in the permanent magnetic field of the loudspeaker structure, no electric current can be induced in it when it is powered by an ac audio voltage signal – the current is produced only by the voltage signal. For audio frequencies, the electrical capacitance of the coil can be ignored, and the electrical impedance Z e of the loudspeaker coil has resistive and inductive parts only: Z e = Re + jωLe = Re + jXe where Re is the electrical resistance, Le the electrical inductance, ω the angular frequency (=2πf ) of the voltage signal (and of the resulting current) and Xe = ωLe is the electrical reactance. The complex impedance Z e = |Z e |ejα = |Z e | cos α + j|Z e | sin α from which |Z e | cos α = Re and |Z e | sin α = ωLe Suppose that the voltage signal is written in a compatible way: V = |V |ejωt = V◦ ejωt Since V = IZ e , I= V V◦ j(ωt−α) V◦ ejωt e = I◦ ej(ωt−α) = = jα Ze |Z e |e |Z e | Thus |Z e | can be measured from values of data pairs V◦ , I◦ for any chosen angular frequency ω. A separate measurement of the phase difference α then allows a complete specification of Z e . 3 Loudspeaker Impedance At its simplest, a loudspeaker consists of a conical diaphragm with a circular coil of wire mounted at its (relatively free) narrow end concentrically. The rim of its outer end is fixed to a rigid circular frame and the diaphragm between frame and coil is sufficiently flexible to deform slightly, periodically, when the coil moves axially, periodically. The periodic movement occurs because the coil is a current-carrying coil in a radial magnetic field B produced by a permanent magnet of suitable shape. Because the coil is moving in a magnetic field, “cutting” the magnetic field lines, an induced emf ε (sometimes called a back emf) is set up. Once any transients have subsided, the net voltage V − ε and the corresponding current I are related by V − ε = IZ e , or, alternatively, V = IZ e + ε = IZ. The total impedance Z has an electrical component Z e and a component which must be related to the mechanical properties of the loudspeaker. The same V as before produces a different I from before because the total impedance is now different from Z e . Just as for Z e , the frequency-dependent values of Z can be found from measurements of V and the “new” I. In general, the frequency dependence of Z will be different from the frequency dependence of Z e . In particular, because the motion of the loudspeaker coil is the oscillatory motion of a driven, damped harmonic oscillator (simple harmonic for small amplitudes) a resonant behaviour can be anticipated. This can be traced back to the properties of ε. It was assumed without comment, earlier, that each loop or turn of the coil experienced the same constant radial magnetic field B, produced by the permanent magnet. Thus for a current I in the coil the total force experienced is, in magnitude, Z F = n| Idl × B| = nIB × 2πr = IBl where l is the total length of the wire coil, each loop having radius r and length 2πr, to a reasonable approximation. Each loop moving axially through the radial B-field contributes the same amount to the total induced emf ε. Let the coil move a small distance dx in the short time interval dt. Each loop then cuts through 2πr × dx × B magnetic field lines in dt. The magnitude of the induced emf is then ε = n × 2πr × dx × B/dt = Blv, where v is the velocity magnitude and v has the same periodicity as that of the applied voltage V . Introduce now the mechanical impedance Z m , defined (as is customary) by v = F /Z m . Thus the larger Z m , the smaller is the velocity v produced by a given force F . Then ε = Blv = Bl F BlI (Bl)2 T2 = Bl = I= I Zm Zm Zm Zm where T is called the “transduction coefficient”. It follows from V = IZ e + ε that T2 T2 V = IZ e + I = Ze + I = ZI Zm Zm The justification of the definition of Z m is as follows. Suppose that the motion of the loudspeaker coil plus cone can be modelled as the driven damped simple harmonic motion 2 of an object of mass m subject to a restoring force proportional to its displacement x and a dissipative force proportional to its velocity dx/dt. Introducing a driving force F , the equation of motion is d2 x dx =m 2 dt dt where k and b are constants. To keep the notation as simple as possible, show time dependence explicitly by writing F ejωt in place of F and xejωt in place of x. Then v = jωx, and x = v/(jω), and acceleration = jωv, leading to: F − kx − b F −k v − bv = mjωv jω or F = k k + b + jωm v = b + j ωm − v jω ω Traditionally this is written F = Rm + j ωLm − 1 ωCm v = Z mv mimicking the electrical notation. F /v is now the mechanical impedance Z m ; and Rm , Lm and Cm are the mechanical resistance, inductance and capacitance It follows that Z = Ze + T2 Zm T2 = Re + jωLe + 1 ωCm − ωLm Rm + j ωLm − = Re + jωLe + Rm − j T2 1 ωCm from which T2 1 Rm + j Z = Re + jωLe + − ωLm |Z m |2 ωCm T2 T2 1 − ωLm = Re + Rm + j ωLe + |Z m |2 |Z m |2 ωCm = R + jX Because |Z m |2 depends on ω, both the equivalent total resistance R and the equivalent total reactance X are frequency dependent. As will be shown next, the shape of the locus 3 of Z plotted in the complex plane can be used to determine the values of Re , Le , T, Rm , Lm and Cm , and hence a complete specification of Z. Two sets of experimental data are needed, one for the loudspeaker on its own and the second for the loudspeaker with a small mass m′ attached to the coil, so that Lm is replaced by Lm + m′ . Im ωL e ω Ze α ω=0 Re Re Figure 1: Complex impedance Ze and its components in the complex plane Figure 1 shows Z e and its components in the complex plane. The locus of Z e is a straight line, starting on the real axis at the point (Re , j0). The mechanical impedance is best represented by the term T 2 /Z m , which can also be plotted on the complex plane. From the earlier analysis T2 T2 = Zm Rm − j ωC1m − ωLm T2 1 = Rm + j − ωLm |Z m |2 ωCm 1 − ωL 2 m ωCm T Rm +j = |Z m | |Z m | |Z m | = T2 (cos φ + j sin φ) |Zm | Here, cos φ = Rm /|Z m |. From this, the frequency-dependent |Z m | in the first factor can be replaced by Rm / cos φ, giving T2 T2 = cos2 φ + j cos φ sin φ |Z m | Rm sin 2φ T 2 1 + cos 2φ +j = Rm 2 2 2 T (1 + cos 2φ + j sin 2φ) = 2Rm 4 Im ω T2 Zm ω=0 φ T2 2Rm 2φ T 2sin2φ 2Rm Re T 2cos2φ 2Rm T2 Rm Figure 2: Locus of T 2 /Z m in the complex plane The locus of T 2 /Z m (figure 2) is a circle of radius T 2 /2Rm whose centre is a constant real distance from the origin. As ω increases from zero, the circle is described clockwise starting from (0, j0). The initial value (at ω = 0) of 2φ is thus 180◦ = π, and with increasing ω, 2φ decreases, becoming zero at Z m = (T 2 /Rm + j0), for which ω = ωr , the resonant frequency. For ω > ωr , 2φ is negative. The locus of Z = Z e + (T 2 /Z m ) is shown in figure 3. This is the curve which can be obtained from plotted values of |Z| and θ, obtained from measurements of voltage V across and current I through a loudspeaker coil. Once a curve has been fitted to the experimental points, a start can be made on evaluating the above set of parameters. Re is the limiting value of the real part of Z as ω → 0 (and as ω → ∞). ωLe is the limiting value of the imaginary part of Z as ω → ∞, 2 ie ω ≫ ωr . At ω = ωr , the real part of Z has its maximum value Re + RTm ; hence the value 2 of RTm if Re is known. To evaluate Rm , further measurements are needed which yield the values of Lm and Cm , see later. Assuming Lm and Cm are known, exploit the trigonometry 2 of the loci of Z and ZT . Let ω have the values ω1 and ω2 at 2φ = 90◦ and −90◦ (ie m φ = 45◦ and −45◦ ). Then Rm = ( ω11C1 − ω1 Lm ) and Rm = −( ω21Cm − ω2 Lm ). Without further measurements, the product Lm Cm can be evaluated from the value of the resonant frequency ωr for which (since 2φ = 0◦ ) ωr2 Lm Cm = 1. A convenient way to evaluate Lm and Cm separately is to attach an object of small mass m′ to the loudspeaker coil, whereupon Lm has to be replaced by Lm + lm where lm = m′ . The resonant frequency will decrease to ωt , say, where ωt2 (Lm + lm )Cm = 1, which together with ωr2 Lm Cm = 1 allows Lm and Cm to be evaluated. As described above, these may be used to evaluate Rm . Finally, from 2 the now known values of Rm , Re and Re + RTm , the value of T can be deduced. Once the values of the six parameters are known, the real and imaginary components of Z can be 5 Im ω φ Ze α T2 Zm Z ω=ω r θ Re ω=0 T 2 Rm Re Figure 3: Locus of Z = Z e + (T 2 /Z m ) in the complex plane predicted retrospectively — mathematical modelling! — as functions of ω. How well the subsequently predicted locus of Z matches the real locus (determined by the observed values of Z – essentially |Z| and θ, where, note well, θ 6= φ) should be of interest for several reasons. 4 Experiment I R DAQ channel #0 ~ DAQ channel #1 Figure 4: Schematic of measurement of Z The PC is equipped with a National Instruments NI PCI-6023E multifunction data acquisition (DAQ) card [2]. This can be used to measure the voltages across the loudspeaker and a series resistor (figure 4). A National Instruments LabVIEW application [3] is provided which acquires data from two of the analogue input channels of the DAQ card and measures the frequency, amplitude and phase difference of the signals. Measurement of the 6 voltage across the resistor R determines the circuit current I. The circuit current I and the voltage across the loudspeaker determine the magnitude of the complex impedance |Z| of the loudspeaker, and the phase difference between the voltages across the loudspeaker and a series resistor (voltage and current are in phase across the resistor) determines the phase angle between the current and loudspeaker voltage. Consider the following issues: • What is an appropriate choice for the value of the resistor R? • What is an appropriate choice for the DAQ card sampling frequency? • How does the LabVIEW application determine the frequency, amplitude and the phase difference of the signals? • How can you estimate the frequency, amplitude and the phase difference measurement errors ? 5 References 1. Electromagnetism, I.S.Grant and W.R.Phillips, Second Ed., Wiley (JCMB Library QC760Gra) 2. National Instruments NI PCI-6023E Multifunction DAQ Specifications 3. National Instruments LabVIEW Measurements Manual 7