Surface Acoustic Waves and SAW Materials
advertisement

PROCEEDINGS OF THE IEEE, VOL. 64, NO.5, MAY 1 976
581
Surface Acoustic Waves and SAW Materials
ANDREW J. SLOBODNIK, JR., MEMBER, IEEE
Abstract-Material parameters necessary for optimum design of sur­
face-acoustic-wave (SAW) devices are reviewed_ Velocity, coupling
coefficient, power flow angle, temperature coefficients, propagation
loss (including air loading, diffraction, and beam steering), and equiva­
lent circuit parameters are considered. A brief introduction to the na­
ture of surface waves is followed by sufficient theoretical information
to allow full understanding and derivation of the properties and pa­
rameters cited above.
A convenient tabular summary of important
CELAYEC
ELECTROMAGNETIC
ELECTROMAGNETIC
INPUT
OUTPUT
f
SAW material properties is included.
PIEZOELECTRIC
MATERIAL
INTRODUCTION
A
�
TRANSCUCE
�
�
tions of surface-acoustic wa e (SA W) su strate aterials
�
.
,
is essentlal for the realizatlOn of effiCient deVlce per­
formance.
SAW device design up to microwave frequencies.
Included
will be SAW velocity, coupling constant, power flow angle
(the slope of which determines the extent of beam steering
and diffraction), temperature coefficients of velocity and de­
lay, capacitance per unit length of interdigital transducers,
equivalent dielectric constant, propagation loss (including air
loading, diffraction, and beam steering losses), and a brief
mention of mass loading.
A convenient tabular summary of
many of these and other parameters for popular SAW sub­
strates will be presented in the conclusion to this paper.
After a brief introduction to the nature of surface waves in­
cluded at the end of this section, the remainder of the paper
will be devoted to the detailed descriptions and derivations
necessary to fully understand and utilize the information cited
above.
In this way a complete description of surface acoustic
waves, SAW materials, and their properties will result.
Suffi­
cient detail will be included to allow understanding by the
novice in the field, while sufficient depth will be provided for
the experienced SAW engineer to deepen his understanding of
SAW materials.
�
",,'
"
It is the purpose of this paper to provide useful
guidelines to all major material factors and tradeoffs affecting
ACOUSTIC
SURFACE WAVE
INTEROIGITAL TYPE
P ROPER understanding of the properties and limita­
"�
" '"
��
", "
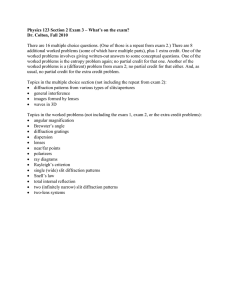
Fig. 1. Schematic representation of the launching and
propagation of
.
a surface acoustic wave.
7
r
\I
1f
r--
t-
�
....t.
rrtt-
+-.tTl1:1
,.....,
-�
....t.
I-rI-r-
r-.....
?!mrs
tr--
,...�
.. rl-,...�-..
...-t1-1-
r.....
r-
\
r- .....
-rr-�
r-
r
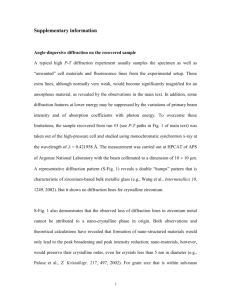
Fig. 2. Illustration of the displacements of a rectangular grid of material
points characteristic of a surface acoustic wave on an isotropic
material.
Many may find that most of the immediate
information they seek will be contained in the summary Table;
however, with the constant discovery of new materials it will
eventually be necessary to resort to the theory in order to
compute design parameters for orientations not tabulated.
A schematic illustration of the generation and propagation
of a surface acoustic or Rayleigh
[ 1 ] wave is shown in Fig. 1 .
The elastic wave is launched by the fields generated at the
interdigital
[2] transducer (IDT) acting through the piezoelec­
tric effect.
The energy of the wave is exponentially decaying
into the material and is generally confined to within a few
wavelengths of the surface.
The actual displacements of a
rectangular grid of material points illustrative of a surface
wave on an isotropic material are shown in Fig.
2. The mathe­
matical formalism necessary to generate a diagram such as this
in the general anisotropic case will be presented in the next
section.
Manuscript received October 24, 1975.
The author is with the Air Force Cambridge Research Laboratories
(AFSC). Hanscom AFB. MA 01731.
SAW
PROPAGATION ON ANISOTROPIC CRYSTALS
Introduction
The purpose of this section is to review the complete theo�
retical
solution
anisotropic
Jones
of acoustic-wave propagation on
arbitrary
piezoelectric media as originally developed by
et al. (3], [4].
This is accomplished by solving the
continuum equations of motion together with Maxwell's equa­
tions under the quasi-static assumption, the strain-mechanical
displacement relations, the piezoelectric constitutive relations,
and the appropriate boundary conditions .
These are ,all, of
[ S] but, since one-dimensional prol'aga­
course, in tensor form
tion is assumed, several simplifications will be possible.
General Equations
The set of linear equations describing acoustic-wave propaga­
tion in an arbitrary anisotropic piezoelectric medium is, irr
standard tensor notation, as follows
aTi;
OXj
=p
02Uj
ot2
(S I:
equation of motion
(1)
PROCEEDINGS OF THE IEEE. MAY 197�
582
linear strain-mechanical dis­
placement relations
INFINITESIMALlY THIPI PERFECT ELECTRIC
I
derived from Maxwell's equations
under the quasi-static assumption
linear piezoelectric con­
stitutive relations
where T is the stress,p the mass density,u the mechanical dis­
placement, S the strain, D the electric displacement, E the
electric field, and I{J the electric potential. The primed quanti­
ties, that is the elastic constants (C;jkl), the piezoelectric con­
refer to a ro­
stants (e;jk), and the dielectric constants
tated coordinate system through the Euler transformation
matrix [6] in which wave propagation will always be along
the I direction. Note that the summation convention (over I,
2,3) for repeated indices is employed.
By substitution, (1) through (4) can be reduced to
,
e;
kl
=
pu/,·
j=I,2,3
i - e;kl{J,k; = O.
uk.
1
I
I
PIEZOELECTRIC
CRYSTALLIPIE
'i::;W;;/d
Fig. 3. Illustration of the coordinate system used to define SAW propa·
gation. The shorting plane will be necessary when computing the
quantity t1v{v.
(5)
selected. However, if for a given velocity four such roots can­
not be found the possibility of degenerate surface waves must
be pursued. Upon obtaining the admissible values of Q from
(10), corresponding values of f3; (to within a constant factor)
can be found for each C( from the linear homogeneous system
cited above.
The total fields (mechanical displacement and potential)
may now be expressed as a linear combination of the fields
associated with the admissible values of Q. For X3 > 0
(6)
U; =
(e;j),
. . ,f) k·I
··kIUk II· + e'k1/"',
C'1/
/
(3)
(4)
COPIDUCTOR
( ---- ------ ------
---- - ------- - --- --
(2)
The dot notation refers to differentiation with respect to
time, while an index preceded by a comma denotes differ­
entiation with respect to a space coordinate.
Equations (1) through (6) are, of course, valid only within
the crystalline substrate, i.e., for X3 > 0 as defined in Fig. 3.
This figure also defines the geometry under consideration and
illustrates the meaning of wh
0, and wh = 00 corresponding
to a shorted surface and a free surface, respectively. For
-,; �x3 �0 Laplace's equation describes the electric potential
=
4
L
1=1
B(l)f3}l) exp [-Q(l)WX3/Vs) exp [jw (t - X l/Us)],
i=I,2,3 (I I)
I{J =
±. B(I)f3�1) exp [-a(l)WX3/Vs] exp [jw(t - XI jus)]'
1=1
(12)
In the region -h �X3 �0, the potential is a solution of
Laplace's equation (7). A solution satisfying the continuity
condition at X3 =0 and vanishing at X3 = -11 is
(7)
-h�X3�0.
Surface-Wave Solutions
Solutions of (5) and (6) are assumed to be of the standard
complex traveling-wave form in which Us is the wave velocity,
Q the exponential decay into the crystal, and w the steady­
state angular frequency.
Uj = f3
; exp [-QWX3/Vs) exp [jw (t - xi/us»),
i= 1,2,3
1{J = f3 4 exp [-QWX3/Vs) exp [ j w (t - Xl/Us»).
(8)
(9)
The displacements and potentials are considered to be inde­
pendent of the Xl coordinate.
Substituting (8) and (9) into (5) and (6) yields a linear
homogeneous system of four equations in the unknowns {31 ,
f3l, f33, and f34. The determinant of the coefficients of the un­
knowns in these equations must be zero in order that a non­
trivial solution exist,i.e.,
AsQs +jA7Q7 +A6Q6 +jAsQS +A4Q4 +jA3�
+AlQl +jAIQ+Ao =0
I,
(10)
where the coefficients An' n =0, ... , 8, are purely real and
a particular value of Vs has been assumed. Since the fields
must be bounded,or go to zero as X3 � ""',only the roots with
nonnegative real parts are allowed. In addition,these roots are
either pure imaginary or occur in pairs with positive and nega­
tive real parts. In general, roots occur such that four (three
for nonpiezoelectric crystals) with positive real parts can be
(13)
Mechanical and electrical boundary conditions [3], [4]
must also be satisfied by substituting the waveforms (11 H 13)
into the appropriate expressions for these conditions. This
yields a set of homogenous equations for the so-called partial
field amplitudes B(l). The transcendental equation obtained
by setting the determinant of the matrix of coefficients of
this system equal to zero determines the surface-wave ve­
locities for a given set of Q(i).
Once (10) and the set of B(l) equations have been simul­
taneously solved by computer iterative techniques [4] for the
actual set of Q(l) (with associated (3}1) and the actual surface
wave velocity, the partial field am litudes B(j) ' I ' 2 " 3 4
may be calculated to within a constant factor.
These amplitudes are used directly to evaluate the com­
ponents of the mechanical displacement of (11) and the elec­
tric potential of (12). The components of the electric field,
strain, electric displacement, and stress as functions of WX3
follow from (3), (2), and (4), respectively. Finally, the com­
ponents of total time average electromechanical power flow
are given by
�
Time Average Power
=
IS""o
--
2
=
Re [T.·1/·u"']
/ dx3 +..!..
2
. Re
(I{JDil
{""
0
dX3
(14)
583
S LOBODNIK: SAW MATERIALS
where the two terms
are, respectively, the total complex
mechanical and electrical power components.
Considerable simplificatio�s of the basic surface-wave equa­
"
�
(11) and (12), result in the case of isotropic or other
tions,
degenerate materials.
for these expressions
...
Q
....
...
>-
>
...
Applications of the Theory
�
Using the expressions derived above, it is possible to generate
various. crystalline
0::
:>
'"
orientations as
[8)
continuous
-5
plate normal (boules), or for simultaneous rotation of both
-
2.81105
the plate normal and direction of propagation (cylinders). An
example of this type of curve is given in Fig.
is defined
4.
[ 3 ] for piezoelectric materials
,
�
as the percentage difference in velocity between free surfaces
(wh = 00 ) and surfaces coated with an infinitesimally· thin per­
digital transducers.
�
r-
2.0110
=
1.2
It is interesting to note that, as expected,
excellent agreement is obtained when
I1v/v
[ 111.
The power flow angle I{) is defined in Fig.
II05 �
�
..
-51
0.4010
for quartz is com­
pared with the coupling coefficient derived by Coquin and
Tiersten
��
,,
-31
(wh 0). This quantity has been shown (9),
[ 10 ) to be a direct estimate of surface-wave coupling to inter­
fect conductor
UTaOs
3.6110
plane of a plate (plates), as functions of the direction of the
I1v/v
V-CUT PlATE
pre­
graphical functions of either direction of propagation in the
The quantity
�
Since we are dealing with
anisotropic cyrstals, these quantities are generally
for
r
i
3190r-
� 3170
Three types of data are particularly important : surface-wave
·
I1v/v as defined below, and electro­
sented
I
I
...
u
[ 81 .
velocities, the quantity
mechanical power flow angles.
r-
! 3210r
The re.ader is referred to the literature
(7) .
a large body of necessary and useful SAW information
3230ri
I
I
5 as the angle be­
'212_-: ?
+4.2�
tween the time average electromechanical power flow vector
..
and the direction of propagation (phase velocity vector). Un­
less I{) identically equals zero (defined as a pure-mode axis).
the condition of beam steering is said to occur.
the power flow angle, that is
quantity.
al{)/ao,
The slope of
is a highly important
Its magnitude determines the amount of beam
steering resulting from a given unintentional misalignment
from a pure-mode axis, and its magnitude and sign determines
the extent of surface-wave diffraction. Later sections will deal
with these subjects in detail.
TEMPERATURE COEFFICIENTS OF VELOCITY AND DELAY
Introduction
!
18
Another important parameter in many applications is tem­
perature sensitivity.
For example, Carr
et al. [ 121 have shown
that the principal limitation on the application of surface wave
encoders and decoders to multiple-access secure communica­
tions systems is the degradation of the peak-to-sidelobe ratio
of the
ences.
autocorrelation function due to temperature differ­
This is illustrated in Fig.
6. Additionally, the tempera­
ture stability of the center frequency of surface-wave bandpass
filters is a direct function of the temperature coefficients of
the material and orientation being used.
Temperature Coefficient Computations
The temperature coefficients of surface-wave velocity and
delay
[ 1 3] have previously been tabulated [ 141 for piezoelec­
tric materials of interest.
summarized in Fig.
The main results of this study are
7 along with I1v/v information. The tem­
perature coefficient of velocity is readily calculated using
available data on the temperature coefficients of the elastic,
piezoelectric, and dielectric constants plus the density to com­
pute velocities at various temperatures, obtain the slope at a
I
90
)
54
126
PROPAGATION DIRECTION,8 (DEGREES)
Fig. 4. Velo city. 411/11, and
power flow
162
angle curves for V-cut LiTa03•
given temperature, and divide by the velocity at that tem­
perature
( 141.
For many applications, the parameter of interest is not the
temperature coefficient of velocity but the change in delay
time with temperature. The first-order temperature coefficient
(!..)-l � (.!...)
of delay is given by
..!.. aT
T aT
where
=
Us
I/Vsavs/aT
aT Vs
=
..!.. � ..!.. aus
1
_
aT
Vs aT
=
0:
_
..!.. aus
Us aT
(15)
is the velocity temperature coefficient. T
=
l/vs is the delay time, 1 is the distance between two material
points, and 0: is the coefficient of thermal expansion.
Temperature Coefficient, Coupling Tradeoffs
Ideally, one desires zero temperature coefficient of delay
and high coupling.
At present this is not possible (as illus-
584
PROCEEDINGS OF THE IEEE, MAY 1976
PLAT[
/
CRYSTALLINE
UIS
NORIIAL
/
/
\
SURFACE WAVE
PROFILES
OIITPJT
TlWCSIlUCER
INPUT
TRANSCUCER
-- .---
--.--- -- -
\
8
AllIS.
)
CllYSTAU.INE
Fig. S. Schematic representation of the profiles of a propagating acoustic surface wave on a crystalline substrate. Angle e defines direction of prop·
agation with respect to reference crystalline axis, and angle </> defines deviation of power flow from phase velocity direction.
�
I
I
0.07000
13 Blr BARKER SEQUENCE
14
12
-I
0.04000
0.02000
�,..... CORRELATION
___
__
16.!.x.c2
LoNbO�
41!x 2
Yl
I
0.00700
79!.-
o 2
0.01000
PEAK
lYo
10
0.00200
;=8
::;
>
"-
�
Go
�6
0.00010
.
6.
.14
PHASE DIFFERENCE. 6. (RADIANS!
Correlation peak and maximum sidelobe amplitudes (left
ordinate) and correlation peak-to-maximum-sidelobe ratio (right
ordinate) as a function of
Fig.
YX"
0.000701-
0.00020
Ll</>
=
271'W
(- )
1 aT
TaT
LlT
for a 13·bit Barker code sequence. W is the number of wavelengths
between decoder transducers while LlT is the temperature difference
between encoder and decoder (after Carr et al. (12 J).
trated in Fig. 7), thus requmng design tradeoffs. ST-cut
quartz [13] has the advantage of zero temperature coeffi­
cient, low-cost, and the ready availability of large substrates.
0
Its coupling is, however, quite low. The 41.5 orientation [IS]
of LiNb03 appears to have excellent properties for that ma­
terial. In fact, additional investigations near this cut have re­
sulted in further improvements [16].
Tellurium dioxide
(Te02) has two orientations with zero temperature coefficients
of delay. Unfortunately, both have low coupling together
with extremely poor beam steering and diffraction properties.
LiTa03 seems to offer the best current compromise between.
112·
Yi
0.001001-
2
-
o� 0
QUARTZ
0.000401-
4
o
3�·1I9�·
,_
78'2
0.00400
&oJ
o
LITo03
)( LoNb0
3
o LiTa03
39
" QUARTZ
ST
.
TeOz
0.00007
lX
0.000041-
5sf
0.000021-
80
60
40
Te02
20ppm
TEMPERATURE COEFFICIENT OF DELAY
I 1.!!.1
T .T
Fig. 7. Temperature coefficient of delay versus Llv/v for popular SAW
orientations.
coupling and temperature sensitivity, although recent work on
the fundamental properties of temperature compensation
seems to offer significant hope for the future [17].
MATERIAL PARAMETERS FOR EQUIVALENT CIRCUIT USE
Interdigital Transducer Equivalent Circuit
Since the interdigital transducer is fundamental to any SAW
device, considerable effort has been devoted over the past
several years towards obtaining an accurate IDT model [18]­
[20]. Several approaches have been developed which can suc­
cessfully predict the performance of apodized (varying finger
585
SLOBODNIK: SAW MATERIALS
,
r-----------
Z.
,--------1
,
,
I
ZTOT
. L
R
:
� __ _ _ _ _ _ J
.
-:
Z
T
SUBSTRATE
Fig.
G,If)
C,
,
,
-
,.
,
INTEROIGITAL FINGER
�
,
;..-- L1 '--"':"'i
Illustration of the definition of DxlLx used in the calculation
of rmger capacitance.
Delay line insertion loss (IL) then becomes
,
... _-----------
Fig. 8. Generalized equivalent circuit of periodic unapodized inter­
digital transducer operating in matched transmission line syste m .
ZT represents the acoustic and fmger-capacitance elements. RC
represents the ohmic loss in the interdigital fingers, Ce represents
parasitic shunt capacitance, and ZL is the impedance of the lossy
tuning inductor. VG and RG are the equivalent circuit elements of
.
the generator.
9.
o.
IL (dB) = -10 10giO (TEd(TE )
2
assuming different input and output transducers.
Capacitance per Unit Length and Equivalent Dielectric
Constant
The total static capacitance CT is given by
'"
'"
C FFLNus 2rrCFFu sLN
=
CT=
overlap) nonperiodic transducers. Since, however, the material
parameters necessary as input to these more powerful models
are generally the same as those used in simpler approaches, we
shall confine our attention to the equivalent crossed-field
circuit model of a periodic uniform-overlap interdigital trans­
ducer operated in a matched transmission line system as illus­
trated in Fig. 8.
Here VG and RG represent the equivalent circuit of the gen­
erator; RL represents the loss associated with the inductor, L;
Rc represents the conduction loss in the transducer fingers;
Ce the parasitic shunt capacitance; and CT is the usual static
capacitance of the transducer fingers. Note that both the
acoustic radiation susceptance Ra(!) and the acoustic radiation
conductance G a(!) are functions of frequency as given [18 1 ,
[21) by the following expressions:
'"
( )
(
)
Sin X 2
Ga(f) = Ga -x
'"
Ra(f) = Ga
Sin 2x - 2X
.
2x 2
(16)
(18)
and
(f- fo)
fo
(19)
where k2 is the electromechanical coupling coefficient to be
described below, f o = w o / 2rr is the acoustic synchronous fre­
quency, and N is the number of periods in the interdigital
transd�cer.
Transducer loss is defined as the ratio between the power
which could be delivered to a load (transducer) from a
matched signal generator and the actual power leaving the
acoustic port in the desired direction [21). Thus assuming a
complex current IT flowing through ZT in Fig. 8, transducer
efficiency (TE) can be written as
TE =
t (t Re ZT / IT /2)
[8:;]
(20)
where bidirectionality has been accounted for with an addi­
IT can be determined in terms of circuit
tional factor of
parameters and VG using standard network analysis.
t.
fo
(22)
Wo
where t is the acoustic aperture in wavelengths, and CFF is
the capacitance per unit length of a single period (this is twice
the value of a finger pair). CFF is fundamental to lOT analysis
and is given by [221
J
CFF= 2(E R + 1)(6.5 (Dx/Lx)2 + 1.08(Dx/Lx) + 2.37) X 10-12.
(23)
J
The parameter E R is the relative equivalent dielectric con­
stant given by [23)
(24 )
where Ell, E33, and El3 are actual dielectric constants at c on ­
stant stress with the I direction being the direction of propaga­
tion of the surface wave. Finally, the ratio Dx/Lx is the finger
width to center-to-center spacing ratio as illustrated in Fig. 9.
Coupling Constant k2
(17)
Here
x = rrN
(21)
is
The basic measure [24) of the efficiency of a SAW material
the coupling constant k2 given by [231
( )
Au
AU
T
k2 = 2 (I + (EPR)-1) - 1 - u_
Uoo
-
I
( 25)
Note that for many materials a good approximation to k2 is
just twice Au/v, again underscoring the importance of this
parameter.
PROPAGATION Loss
One of the major sources of overall device insertion loss at
microwave frequencies is propagation loss or attenuation. Not
only is the magnitude of this phenomena important for pre­
dicting absolute insertion loss and dynamic range, but its fre­
quency dependence is equally important [25] .
Total propagation loss is a superposition of three different
mechanisms [2 6 ) . 1) Interaction with thermally excited elas­
tic waves. 2) Scattering by crystalline defects and surface
scratches. 3) Energy lost to air adjacent to the surface. The
first mechanism is an inherent crystalline property, the magni­
tude of which can be predicted using viscosity theories 127] .
The second is, of course, highly undesirable and, fortunately,
can be made negligible by proper crystal growth and polishing
techniques [26). The final mechanism is caused by the sur­
face wave being phase matched to a longitudinal bulk wave in
the air which results in a leaky-wave phenomena [28). This
PROCEEDINGS OF THE IEEE, MAY 1976
586
[301 are illustrated in Figs. 10 and 11. Note the approximate
f 2 dependence of the former and the linear dependence of the
latter. This allows an empirical expression for propagation
loss to be derived from the data.
u
.
�
III
�
::Ii
:::>
:::>
u
�
!
z
0
�
..
:::>
z
...
�
�
70
Propagation Loss (dB/JIs) = (VAC) F2 + (AIR) F
4.0
where F is in GHz. The coefficients VAC and AIR are tabu­
lated for popular substrates at the end of this paper. Equa­
tion (26) would be used, for example, when designing fLiters
having particular bandpass characteristics .
2.0
0.7
...
>
.. 0.4
�
DIFFRACTION AND BEAM STEERING
o L, NbO,
x
...
U
.. 0.2
"-
8,GeO
'il
to
" QUARTe
II:
:::>
en
u
�
en
:::>
0
u
200
400 700
2000
FREQUENCY
4000
(MH.)
..
Fig. 10. SAW attenuation in vacuum as a function of frequency for
YZ LiNbO), 001. 110 and 111. 110, Bi12GeO.o, and YX quartz.
Experimental slopes are all approximately ['. Data for quartz courtesy
of Budreau and Carr [30 I.
..
•
..
"....
III
"
O.!I
"
z
is
..
9
a:
4
....
::;)
o
.3
0.3
1.9. 10
';c
::;)
z
....
�
Vo
.
o
�o
MH.-f'-StC
o
0.2
LiN bO
..
�
1
+1 (8 - 80 )2
2
"I
,
(27)
where l' = o¢loe and eo is the angular orientation of the pure­
mode axis. By comparing these approximations to an exact
solution for electromagnetic diffraction in uniaxially aniso­
tropic media, Cohen showed that the diffraction integral re­
duces to Fresnel's integral with the following change
"
Z =ZII + 1'1.
�
....
>
Diffraction of surface waves is a physical consequence of
their propagation and 'can vary considerably depending upon
the anisotropy of the substrate chosen. In fact, it is the slope
of the power flow angle which determines the extent of both
diffraction and beam steering [311. There is an inherent
tradeoff between these two important sources of loss.
A useful theory for calculating diffraction fields when the
velocity anisotropy near pure-mode axes can be approximated
by a parabola has been developed by Cohen (32). By using a
small angle approximation , he showed that for certain cases,
the higher orders of the expression for the velocity could be
neglected past the second order. That is,
V(O) �
o
dB
Parabolic Diffraction Theory
QUARTZ
SLOPE'
z
�
"
0.4
Ci
�
(26)
(28)
Szabo and Slobodnik (31) introduced the absolute magnitude
signs to account for those materials having 'Y < - 1 and the
hatted terms to stand for wavelength scaled parameters (2
ZIA). In other words, diffraction is either accelerated or re­
tarded depending on the value and sign of 1'. Excellent agree­
ment (31) between this parabolic theory and experiment has
been obtained whenever a good parabolic fit to the velocity
In some cases, however, a more general theory
is possible.
·
is required.
=
0.1
XX
x
!lOO
1!l00
1000
FREQUENCY(MH.)
2000
Fig. 11. SAW attenuation due to air loading as a function of frequency
for materials listed in Fig. 10. It is interesting to note nearly identical
results for LiNbO) and Bill GeO.o
•
so-called air loading can be eliminated by vacuum encapsula­
tion or minimized by the use of a light gas.
Propagation losses can be determined by directly probing
the acoustic energy with a laser (26). In this method, the
surface wave deflects a small fraction of the incident light,
which is detected with a photomultiplier tube and measured
with a lock-in amplifier . The deflected light is directly propor­
tional to the acoustic power of the surface wave .
Air loading can be determined by placing delay lines in a
vacuum system and reducing the pressure below 1 torr while
monitoring the change in insertion loss . Vacuum attenuation
is, of course, the difference between the total propagation loss
in air and the air loading component.
Frequency dependence of vacuum attenuation and air load­
ing for three of the most popular SAW substrates (26), (29),
Angular Spectrum of Waves Diffraction Theory
In order to solve the most general homogeneous anisotropic
.problem, Kharusi and Farnell [33] applied the angular
spectrum-of-waves technique to surface-wave diffraction. Their
theory is valid for both the near and far fields, and for any di­
rection including off-axis orientations. Its only limitation is
the requirement of accurate knowledge of velocity values for
the surface of interest. In implementing' their theory the fol­
lowing integration is performed numerically for each field
point:
.
1
A(X,Z) = 1T
foo
-
.
00
sin K ILI2
KI
Here K3 and Klare the projections of the wave-vector K along
the Z and X axes, respectively, or in general, along directions
587
SLOBODN IK: SAW M ATERIALS
THEORY
s·o, p·o
S'06°,
Z'£,6
p·o
S'06°,
p·53
EXPERIMENT
Zo66
Z'£,6
Zo 267
20267
i"494
Z.494
i. 814
i.el4
2:1242
2"242
a:
w
�
0
Q.
W
>
�
W
U
<I
...
a:
:::l
'"
U
;:
'"
:::l
0
U
...
w
>
;:
...
...J
W
a:
201242
o
TRANSVERSE DIMENSION
I
Zo66
h
!�
A
A
0
WAVELENGTHS)
o
Zo267
i"494
z: 814
i"242
.40
Fig. 12. Theoretical and experimental surface-wave profiles illustrating diffraction near Ill-axis of 21 1-cut gallium arsenide. Z indicates distance
for propagation in wavelengths from input transducer, IJ gives the misorientation from Ill-axis, and P is laser probe diameter in acoustic
wavelengths.
perpendicular to and parallel to the transducer. The effect of
introducing a laser probe in the profile measurements can be
accommodated [31] by inserting
sin K IPi2
K IP/-2
(30)
(in which P is the probe diameter) into the preceding inte­
gral (29).
The real power of the exact anisotropic theory can be illus­
trated by its ability to predict even the fine structure of a
diffraction pattern on a highly nonparabolic velocity surface,
including profile asymmetry due to beam steering_ An ex­
ample is shown in Fig. 12. The case studied [31 ] concerns
surface waves launched close to the Il l -axis of 2 1l -cut
gallium arsenide at a frequency of 280 MHz. Transducer
widths were f = 5 1. This orientation was chosen [31] be­
cause the velocity is nonparab'olic and changes very rapidly
with direction . The first column of Fig. 12 shows profiles for
waves propagating exactly along the pure-mode Il l-axis, a di­
rection corresponding to I/> = O. Also note that the smoothing
effect of the laser probe has not yet been included (P = 0).
For the second column a misalignment of 0_60 from the 111axis has been introduced, and the waves begin to take on the
asy mmetric behavior and beam steering of the experimental
measurements (shown in the right-hand column) obtained
using the laser probe [26] technique. The third column intro­
duces the same amount of angular misalignment as column
two but, unlike the previous columns, includes the effect of a
laser probe diameter of P = 5.3 wavelengths. The agreement
between this column and the experimental curves is excellent.
Quantitative Choice of Theory
The versatility of the exact angular spectrum of waves theory
has been demonstrated; however, this approach is far more
computationally complicated and costly than the parabolic
theory_ It also requires precise velocity surfaces as input data.
Given a certain material, then, the designer must have guide­
lines from which he can choose the simplest appropriate theory.
The closeness of a given velocity surface to a parabolic curve
can be determined by fitting the surface to a parabola and
noting any deviation. In particular, second-order fits were ob­
tained [31 J for various materials by using a least squares fit
with relative velocity values computed to seven significant
places within a range of ±5° of (8 - 80) = O. The maximum
deviation of the fit from the velocity surface can be defined in
terms of the quantity 10M I. For comparative purposes, this
deviation is expressed as a percentage of the actual velocity
and, for convenience, is multiplied by a factor of 105, i.e_,
(31)
A complete study of diffraction loss using the exact theory on
many velocity surfaces not perfectly parabolic resulted in the
following conclusion.
Anisotropy may be conveniently
588
PROCEEDINGS OF THE IEEE,
�.o
PARJ.IOI.IC THEORY
[ t SOTROPtC ....T[RIAlSI
PARABOLIC THEORY
EXPERIMENTAL
�.-o.99
RESuL.TS
lO�
iD
g
�
�
u
�
...
i5
1.
-l Z '1206
�
or
;.. . 41-I
i
5
I."
DIFFRACTION LOSS ... SCALED
TRANSDUCER SEPARATION. (
i IL.') II+rl
MAY 1976
6
IH
'0'
r
6r
2f
��--����--���--��-4�--�--r----
9
01
.
.04
.1
(�/ e�1 +TI
4
.4
Fig. 13. Universal diffraction loss curve for all parabolic materials as a
11 + 1'1. To convert to.theactual distance in wave­
function of
lengths on horizontal scale simply insert L . width of your transducer
in wavelengths. and l' (from Table I) appropriate to your material.
(Z/L')
grouped into two categories-parabolic (0 < 10M I :s 2.0) and
nonparabolic (2.0 :s 10M 1< 00) . Higher order terms discarded
in the approximation of ( 27) become significant [31] for non­
parabolic surfaces.
However for velocity surfaces having 10M I :s 2.0, the para­
bolic diffraction theory yields highly accurate results. Thus
for all materials meeting this criterion, diffraction patterns
are exactly equivalent in form, and merely scaled in distance
by the factor I 1 + 'Y I allowing universal diffraction loss curves
to be calculated [31 ] . One such curve shown � fig. 13 is a
plot of diffraction loss versus the parameter (Z/L 2) I I + 'Y I­
This curve allows the determination of loss for any combina­
tion of transducer width and separation for all parabolic aniso­
tropic velocity surfaces. It was calculated by integrating the
complex acoustic amplitude over the aperture of the receiving
transducer for identical unapodized input and output trans­
ducers [3 1] .
In the Fresnel region the loss never exceeds 1.6 dB, which is
the loss at the far-field length, Z ZF (where the final peak in
the beam profile has started its descent to a far-field pattern).
The distance and transducer width at which a given loss will
occur can always oe given in far-field lengths. For example,
the 3-dB loss point is
=
(32)
where now
A
ZF =
£2
(33)
--
II+'YI'
In the far field, the loss mechanism is the spreading of the
beam with a slope of 10 d B/decade. The far-field loss can be
approximated by
Z
Loss (dB) = -10 log A '
ZF
(34)
Minimal Diffraction Cuts
One extremely important implication of the parabolic diffrac­
tion theory is that since it reduces to the isotropic theory
DISTANCE IN TRANSVERSE DIMENSION I WAVELENGTHS)
Fig. 14. Illustration of the two orders of magnitude diffraction suppres·
sion achieved using t!:le 40.04 Bi" GeO, minimal diffraction cut. An
acoustic aperture of L = 40.56 wavelengths was used.
o
scaled by the factor 11 + 'Y I, no diffraction spreading occurs
for ideal parabolic surfaces having 'Y = - 1. Material orienta­
tions approaching this ideal have, in fact,been discovered [34J.
A set of experimental SAW profiles for the 40.04 minimal
diffraction cut (MDC) on bismuth germanium oxide are pre­
sented in Fig. 14. Experimentally,diffraction is suppressed by
a factor of 100. These MDC orientations are allowing a new
class of highly apodized acoustic surface-wave filters and long­
time-delay devices to be realized.
The Beam Steering Diffraction Tradeoff
As mentioned at the outset of this section, there is an in­
herent tradeoff between beam steering and diffraction. In
anisotropic materials, beam steering occurs whenever trans­
ducers are misaligned from a pure-mode axis 60, even though
they may be perfectly aligned with each other. Beam steering
is the pulling away of the acoustic beam from the transducer
propagation axis by an additional angle, cP = "Y (8 - 80), as
shown in Fig. 5. Let us discuss this tradeoff in more detail.
Diffraction is a fixed phenomenon for a given material, while
beam steering can be controlled by precise X-ray alignment at
the expense of increased device cost. Both,however, influence
the choice of SAW substrate [35]. An example of how the
combined loss of beam steering and diffraction varies among
materials is illustrated (35] in Fig. 15 where the loss is given
as a function of 'Y.
For Fig. IS the acoustic aperture is t = 80 wavelengths, the
distance between input and output transducers is Z = 5000
wavelengths,and the misalignment from the desired pure-mode
axis, or the beam steering (BS) angle, is B S � = 0.10. In order
to use these data for practical situations, it is only necessary
to insert the slope of the power flow angle appropriate to.the
type and cut under consideration. It is also useful to note
that Z = tf; where t is the time delay and f the frequency of
the device of interest.
Several important features can be noted with reference to
Fig. .15. Diffraction loss goes to 0 for those materials having
'Y = - 1.0 and, as expected, the combined loss curve agrees
100
l0 r-----�--._--_r--_.--_,
CD
7
'0
C1
z
ex:
UI
UI
L' 80
40
•
Z • 5000
•
B.S .• '0.1
4
!ii
70
•
'"
..,
C>
�
<{
UI
CD
C
Z
<{
Z
o
�
a:
'"
'"
...
en
2
<{
ex:
u..
u..
E
0.4
�
w
25 0.2
1/1
1/1
o
�
0.1
a
S!
0.7
c
....
0.4
..,
::>
c
�____��____�____��__���__��____-J
-1.5
-1.0
Fig. 1 S. Loss due to diffraction and beam steering 1s a function of slope
of power flow angle for par,bolic materials. L represents width of
transducer in wavelengths. Z the distance between transducers in
wavelengths. and BS� the beam steering angle (defined as misalign·
ment of center line between transducers from desired pure·mode
axis).
exactly with the beam steering loss curve.
having 'Y =
Those materials
0 correspond to locally isotropic cases and beam
steering goes to O.
Here, diffraction accounts for the total
Diffraction loss alone is symmetric about 'Y = - 1.0 and
loss.
4
....
u
...
a:
...
...
c
beam steering loss about 'Y =
clearly nonsymmetric.
0, while the combined curve is
Universal beam steering plus diffraction
'"
'"
0
..J
z'1500
0.2
0.1
•• /U'T
between the envelope of the finger overlap function and the
device frequency response.
most desirable.
Fig.
16 illustrates [351 combined beam steering and diffrac­
tion loss versus the time-delay-frequency parameter
2.
It is
of interest to point out that the loss is very high for the
75 000 curve near 'Y =
-
1 .0.
2=
For this large distance beam
steering is very important, especially for narrow undiffracted
beams, and some beam spreading is to be desired.
(The same
is true if inaccurate X-ray orientation must be tolerated.)
Since
Fig.
2
of
the
original
apodization is reviewed
transducers.
at the higher frequencies and, of course, also for very long
acoustic aperture of width
beam of complex· amplitude
[381
as
S=
Here
T(L)
x
. .
T(L)
M
VL
A (x)
i
to an electrical load from
L irradiated by an acoustic
l
i!'
_
-L/l
has been given by Waldron
.
A (x)dx.
(35)
is the direction perpendicular to the acoustic beam and
is defined in the following manner
[381. The
amplitude
"'-
of the electrical signal delivered to the load is
amplitude of·an acoustic beam
i-wide
T(L) times the
of constant amplitude
and phase and centered on the transducer at normal incidence.
Under the conditions for which an interdigital transducer
can be directly represented as a transversal filter, it has been
shown
[191 that
other words,
T(L)
is directly proportional to
C depends on other physical and geometrical param­
[191 but is independent of t. This
is an important result as it means that the C associated with
where
filter,
Fourier-transform-pair
and
given
individual fmger pair in an apodized transducer. is
"'-
LN
and, therefore, is the
same for all gaps (for periodic transducers);
Since an interdigital transducer can be made to be an excel­
transversal
In
. eters of the delay line
independent of the fmger overlap
SA W Filter Synthesis in the Presence of Diffraction
vI.
(36)
a
time delays.
filter
�
The signal amplitude transferre
an
is proportional to frequency (for fixed time delay),
considered UHF and microwave frequency design problems.
[371
here for periodic
16 also illustrates why beam steering and diffraction are
Significant losses and material tradeoff considerations exist
lent
A direct synthesis method
for correcting for these diffraction effects by modification
choosing a material for a particular application. For example,
where diffraction is potentially a very serious problem, as in
J
Fig. 16. Loss due to diffraction and beam steering as a function of
slope of po�er flow angle with distance in wavelengths between
transducers, Z as parameter.
15 are of major importance in
highly apodized filters, a material having 'Y - 1.0 would be
-----+�.5
-1.5
'----....
=-.l. --�----_0�1.-=-5----:0O-I
loss curves are not possible.
The results illustrated in Fig.
z
7
z
NO BUM STEERING
A
10
c
z
...
DIFFRACTION WllH
PARAMETER
ao
:z
...
'"
'"
t; 0.7
[
r
Equation
(35) can thus be rewritten
digital
[361 design procedures can be used to synthesize SAW
filter frequency responses; at least this is true in theory.
Unfortunately, finger overlap apodiiation results in diffrac­
tion variations which destroy the Fourier transform relation
S=
C
J
ill
A
-Lll
as
A (x)dx
which fonns the basis of the following development.
(37)
590
PROCEED INGS OF THE IEEE, MAY 1976
INPUT
(41), which is obtained by squaring the magnitude of both
(40), dividing both numerator and demoninator of
the right hand side by L� IA (0) 12, rearranging terms and
of
OUTPUT
sides of
.:------y, _____
r----- Zo ------;
...
r-----
multiplYing numerator and denominator by
c.
Lo LN, and finally
by taking logarithms and recognizing that one term represents
L_
diffraction loss between two equal transducers of width
and separated by a distance of
Z o.
Lo
I
z. �
Fig_ 17. Illustration of apodized (right) and unapodized (left) inter­
digital transducers with. definition of terms used in diffraction correc.
tion derivations_
Consider an acoustic surface .w.ave delay line having one
apodized transducer and one uniform launching aperture as
17 . .
illustrated in Fig.
Under the condition of no diffraction,
the voltage across the load due to the Nth finger pair having
overlap
LN, with
respect to the voltage across the load due to
the widest finger pair having overlap
Lo is, from (37)
{ Diffraction loss in dB for two equal Lo
}
Once amplitude correction is achieved as described above.
phase correction is obtained where necessary
the new filter with
phase,
�(N).
Liv
placed at
ZN
[39] by
�,
=
�(N)
'"
ZN + -27T
(42)
a good approximation to phase correction results
(38)
tion used to generate the total result_
In order to synthesize the desired frequency response in the
presence of diffraction it is necessary to achieve this same
ratio, i.e"
[39] .
Thus far we have considered contributions to SAW device
insertion loss arising from both transducer and wave propaga­
tion effects.
Another loss mechanism which must often be
considered in the choice of substrate material is that of bulk
or other spurious mode generation.
Note that each finger pair is treated separately and superposi­
analyzing
to determine the relative
at each finger pair. Then by setting
L. N
ideal case for no diffraction.
(41)
transducers .
detail
This subject is treated in
[ 40] elsewhere in this issue.
ApPLICATIONS OF M ATERIAL DESIGN D ATA
Optimum Transducer Design
Assume
that an optimum, i.e., mlDlmum
insertion loss,
periodic unapodized SAW delay line having only a single
tuning inductor (see Fig.
f�
_
0 /2
-Lo/2
must be set equal to
(39)
A(x,Zo)dx
After this choice the number of interdigital periods Nand
the optimum acoustic aperture must be determined. In practical
design situations dealing with losses and real elements, and
(38)
particularly
'
17.
Fig.
ziv
(40)
A
Lo
is the unknown aperture in the pres­
It is located a
from the launching aperture as implied in
(Lo)
the absolute optimum finally chosen.
value for N is
A reasonable starting
[18]
(43)
For the present analysis, we have arbitrarily set
the widest overlap
bandwidth is also a consideration, the
apertures should be determined for several values of Nand
ence of diffraction of the Nth finger pair.
distance of
where
choices of these parameters are interdependent. Thus optimum
A
-LN/ 2
Liv
ture coefficient,
and loss factors; ST quartz is chosen as the
.
substrate.
fiN/2 A(x, Ziv) dx
In these equations,
8) is to be designed and fabricated.
After consideration of velocity, coupling constant, tempera­
in the presence of diffraction to
Once N is fixed, the best value of acoustic aperture depends
on transducer and tuning element losses, parasitic elements,
and beam steering and diffraction losses.
In order to minimize beam steering and diffraction losses
it is necessary to use the widest possible acoustic aperture.
be equal to the widest overlap if no diffraction were present
Unfortunately, electrical matching considerations limit the
and, in addition, have taken it to be located a distance of
extent to which increased finger overlap can be used to reduce
'
overall device insertion loss. To demonstrate this effect and to
20
from the launching transducer.
Since
(40) is complex it actually represents two equations
in two unknowns
tiv
and
ziv,
the corrected aperture and
develop optimum delay line design procedures, let us investi­
gate transducer insertion loss as a: function of the various
distance, respectively, of the Nth fmger pair in the presence
design parameters, particularly acoustic aperture.
of diffraction. In theory then, the problem is solved. However,
'
[391. Set
be directly determined using (21). Curve
in practice an approximation is more convenient
ziv
=
ZN
and solve for
Liv using a computer iterative solution
Neglecting propagation effects, insertion loss versus
L
can
3 in Fig. 1 8 illustrates
this basic information for ST quartz and a specific set of
591
SLO BODNIK : SAW MATERIALS
r • + 0 378
i
• 6600
B S .. . 0 I "
e , ' 0 I pF
40
CD
I N C LU D I N G
ATTE NUATION
LOSS . B E A M
S T E E R I NG . A N D
II>
...
on
on
0
....
z
�
...
a::
...
on
�
...
z
....
,..
..
....
...
0
D I FFRACTION
��I
>orI .
10i
L
( WAV E L E NG T HS )
Fig. 1 8 . Delay line insertion loss versus acoustic aperture curves used to choose o ptimum (minimum insertion loss) acoustic aperture. Curve 1 in­
cludes real transducer effects (Q = 30, pit = 0.345 0./0, and CE = 0. 1 pF). attenuation loss, beam steering, and diffraction. Curve 2 includes real
transducer effe cts and attenuation loss. Curve 3 includes only transducer effects. Curve 4 is the ideal case corresponding to Q = "" , pit = 0, and
CE = 0 with zero propagation, bea m steering, and diffractio n losses.
,.1t[;:J[��Y ""I
�.�
no.Ol'
'111 .�
I.. I TMJIJ
It
,.
/
T
T
V V
A
" il""';rJO.
CUT
",,,..
v VI \
.....
-- ., ...
-.,.�� ...
Fig. 1 9 . Insertion loss versus frequency characteristics of a cosine-squared-on·a pedestal SAW filter on various substrates. Note the tradeoff be­
tween insertion loss and distortion available by varying the coupling constant k2 • .
S92
PROCEEDINGS OF THE IEEE, MAY
1 97 6
"
"
s=O�===
'2�
D�
D �
S .�
gs 5 . 00
�
��
.0�
'O
�
o��
'3
�
o--,�
' O=
�
ss-oeoo--�=r-F�9r���==�
'S=
==�
'�
.ao
.07
.07
0 ��
0 --�
. 0
0�
..O=
.0=
0=
O===F�-F�=r-F�
.o
.
0
ST
QUR R T Z
S I NGLE E LE C T RO D ES
N O N 5 5 LORD I N G
..
�
..
..
..
..
..
"
..
..
N
"
N
..
..
"
..
r!-
S .OO
300.00
305.00
3\0.00
�
5.00
.ao.OO
.0S.ao
SlO.OO
..
..
..
Ii
S T QUR RTZ
3 1 5 .00
320.00
FRECUENCY MHZ
525.00
515 . 00
330.00
'.40.00
130.00
110.00
3156.00
360.00
LORD I N G W I T
S I NGLE
3 6.00
..
..
�
..
..
..
.,
.,
��
..
Z ..
<>
U S I N G DOU BLE ELECTRODES
..
..
�
..
e
N
..
N
c
"
c!
"
6.00
300.OQ
305.00
S10 .00
3 1 f .00
320.JO
F R E Q U E N C Y r.Hl
:;26.00
330.00
335.00
'.0.00
,45.00
3 5 0 . 00
355.00
360.00
ciI 5 .00
Fi g. 2 0 . Insertion loss versus frequency characteristics of a SAW filter illust rating how mass loading can cause filter distortion and t h e ability of
double electrodes to su ppress these e ffects.
Vs
=
3 1 5 8 m/s. The value of the tuning inductor
realistic parameters
wave velocity
listed in Fig.
was varied for each value of
[ 3 5 1 . In addition to those parameters
1 8 the following values corresponding to ST
660 MHz were used : N = 20 ; inductor Q
30 ;
quartz at fo
time delay
1 0 liS ; sheet resistivity [ 4 '"
1 1 pIt = 0.345 DID,
yielding [ 2 1 1 a value of Rc
4.6 D at L = 1 00 ; unity finger
to gap ratio and relative dielectric constant
4 . 5 5 . yielding
a value of eT
0.48 pF at L
1 00 ; k l = 0.0 0 1 6 ; and surface·
=
=
=
=
=
=
epR
=
L
to obtain the lowest value of
insertion loss for that particular aperture.
When propagation loss at
660 M Hz is included, the overall
loss increases substantially , but the optimum value of acoustic
aperture yielding minimu m insertion loss remains the same.
The final result of our efforts is the top curve of Fig.
1 8 which
TABLE I
'
SAW AND I NTERDlGlTAL TRANSDUCER DESIGN DATA
\I .. h-.·, .I'
Orlt"nl:lthUl
v
.lv/v ..
(... 1 ... ···)
..
( · "Ieu!.,"·"
k�
I ' HII''':
Equal Inn
(2 S )
1 .,Sb03
1 /; ' 1/2 1111
� I ' l/ � ,
X
001, 1 1 0
1:11 12
",
..°20
I . , Ta()�
0. 048
4 . 6438 X 1 0 '
",000.
O. U:!7i
0. 0578
0. 057
6, 1857 X 1 0 '
1 68 1 .
0. 0068
0. 0 14 0
0. 0 1 5
4 . (4522 )( 10- 1
1 8 :! 7 �
11. 1I" 3 1
0. 0064
7., "
3321'.
O. OOf. !'
0. 0 1 2 1
Z, X
LIXb03
B i l�G ..O�O
L , Ta03
Quartz
NOI''''
( · al.·ulu • • ·.1
0. 0068
0. 0074
0 . 00037
.
3205.
o . 00 1 l �
O. 0007�
0. 002 33
.
0. 0023
(w I l i a 'I'uIIU1a= I w l w •• ltu·)
'J
...
pll
•
0
'J
011
'
lUll
0. 34 5
0/1
�
A ...
I
10
' 10
5. 03385 X 1 0
I
10
7 . 0003
10
11
·1\
VAt·
(tlll/,.·...c )
10
X 1 0. 1
T
PIC
9. 3246 )( 1 0 '
Ii. 0117 9
X
10'
6. 68S9 x 1 0 �
6. 6859 X 1 0 -
511. :!
li7. �
10
6. 0979 X 1 0 - 1
6. 0979 X 1 0 '
511 :.!
0
0
43. 6
n. 1i
10
10
4 3 . Ii
n . !1
10
10
41 . 9
�l l
. . . . .
6. 6159 )( 1 0 6. 6t1S9 X 1 0
10
' 10
7. 54 1 2 2 )f 1 0 ·
7. 58824 X 1 0 ·
AIR
(dn/,. .
..c l
47 . 9
4 7 . !I
1
l
4. !", 2
1\
-I . 5 �.
!
&II
IT
"
I ay
'i a
.
1 117
71;
479
' 1 . 083
7 . 87
0. 88
0. 1 9
-87
4. fl
1 13
79
47r.
'
0117
3. on
0. 94
0. 2 1
-II
1.
88
63
3r.7
'0. 445
0. 57
0. 75
0. 30
88
1;9
664
0. 304
0. 1 4
I. U
0. 19
.
1.45
0. 1 9
..
.
'
94
. 96
-57
3. 5
7. 0
. .
72
.
.
.
7. 0
98
76
651
+0. 366
0. 01
1 1 . 00
:lr,
211
390
' 1 . 000
1 . 44
.
. . .
....
!l. 0
:15
22
' 1 . 24 1
5. 04
0, 7 7
0. 2 3
-52
1 0. r.
21
II
· 0. 2 1 1
0. 1 4
0. 94
0. 20
-3 1
35
.
. .
.
.
.
.
-33
49
.
..
.
.
.
. . ..
-5 0
66
. . . .
.
.
..
- 50
64
2. 15
O. U
31
· 24
14
0
l2. 5
. "
18. 5
. ,
7. U
. ,
238
211
. .
.
.
.
.
.
.
..
III . 5
5!l
4 1.
22. U
41
31
to the original Stanford design procedure
Here RL
=
..
...
+ 0 . 1 5 11
...
+0. 4 S0
. . .
.
' 1 . 000
2 . 60
1087
+0. 6 5 3
0.
910
+0. 378
0. 205
. .
.
CFF
.
3 59
1. 61
..
0.41
.
.
. .
..
.
.
.
69
is capacitance per unit length for an IDT period and is twice
Beam steering
difference is easily seen. Under certain restrictive assumptions
Overall minimum
(including neglecting diffra.£tion and parasitic elements ) ,
optimum acoustic apertures L OPT can be determined analyti­
cally [42]. Examples will be given in the summary table.
100
A curve for the ideal case corresponding
and
0
.
10
f
4.0
The optimum apertures were determined graph­
18· for comparison.
•
��
10
7 . 0003 X 10 -
10
5 . 00 GG4 x 10
O, OO lli
1\
'
-OPT
(Nu Tt""It�
Incluo •• lur)
ically , as this has been found to be the most convenient method
attenuation
4 . 4 35 2 x 1 0 '
0. 0022
insertion loss is obtained using an acoustic aperture of f =
an d
. . . .
0. 001l!'
r
X
4 . 4 352
3 I SP.
'"
10'
....
.
0. 00 1 4
X
4. 7 1 114 )( 1 0 '
0. 0 1 54
0. 0005"
4 . 4 35 2 3
.
0 . lh)'�,
and diffraction . loss have been included .
in Fig.
.
:1370.
represents the optimum design inform ation.
in actual practice.
..
0
1
10' 0
X
�. 4 3 S 2 3 X 1 0 '
0. 0093
0 . 0033
Note: All quantities are defined in the text.
that fo r an IDT finger pair.
- Indicates experimental · data.
wavelengths.
4 . 04522
. . .
lHR.
3 15 t1 .
s r, x
. .
10
4 . 0U22 X 1 0 -
0. 0 17
3 2 30.
•
V, X
10
0. 0562
0. 0 1 69
V.X
10
0. 02(;8
O. DOtl�
(I. 7 �.
Jo: lcc lrodc ..
3503.
1\
I ..
\L,h.'I'\.ll
4 . 1;438 )( 1 0 '
•
. ".uhlt ·
Elec lrod...
0. 045
l i O Il .
"x/ I .)(
II. �II
•
SII,"I..
0. 0504
��
�" . ,I�
PO
Y, Z
I>X/ I 'X
1972
1 1 1 . 1 10
0
le;I', (;,�)
90
�u.arl:
0. 1I�� I
3-111 1!.
Y , /.
M"iu.ur..d by
S,-hub und
M uht lnil�r,
-
C •. ,.'
(F/", ,
[ 18] is also presented
0, Ce = 0, BS � = 0 ,
diffraction losses are neglected .
The
The Effect of Coupling Constant on 'Bandpass Filter Design
Obviously the. periodic unapodized delay line described above
is a simplified case .
However, many of the same decisions
must be made for all SAW devices regardless of their complexity
PROCEEDINGS OF THE IEEE, M AY 1 976
5 9.4
or the model used to predict performance.. . Material parameters
must always be evaluated and tradeoffs considered.
For
example, insertion loss can be reduced up to a point by using
However,
a material with mcreased coupling coefficient.
distortion can ·also result; as shown in Fig. 1 9 for a cosine­
squared-on-a-pedestal (in the time domain) apodized SAW
fIlter. If a particular material must be used for external reasons,
design techniques such as thinning ( 4 3 1 can be used to avoid
distortion at the expense of spurious frequency responses. It
should be noted that complicating second-order effects have
been suppressed in the examples of Fig. 1 9 by the use Of .both
double electrodes ( 44 ) , ( 45 1 and dummy electrodes ( 46 1 .
The reader is referred to the cited literature for information
on these techniques. In fact, a large number of design tech­
niques have evolved to cover a wide variety of problems.
Many of these are discussed in other papers in this special
issue.
ACKNOWLEDGMENT
In compiling this survey the author has drawn heavily from
the work of his colleagues at the Air Force Cambridge Research
Laboratories. Particular credit must go to T. L. Szabo, P. H.
Carr, and A . 1 . Budreau without whom this paper could never
have been written.
REFERENCES
[1 )
(2 )
(3)
(4)
The Effect of Mass Loading on Bandpass Filter Design
(5)
As a final example of a material parameter which must be
evaluated when arriving at a f"mal design let us consider mass
loading. Mass loading refers to that portion of the acoustic
mismatch between a free and electroded surface due to differ­
ences in elastic properties rather than the electrical or l1v/voo
mismatch. The latter is, of course, always present when using
an interdigital transducer and varies only according to the
coupling coefficient . Mass loading, on the other' hand, varies
widely among material substrates and the type of metal used
for the transducer electrodes. Quantitatively , a revised l1v/voo
can be computed which indudes mass loading. First define
16)
Voo - v
'
,
1..
2
k2
(44)
DELTA
where v is the perturbed velocity including both electrical
and mass loading effects.
Following the notation of Penunuri and Lakin (471 (but
using a strictly MKS system) v' can be approximated as
v ' � C + B (w n + A (wn2
(45 )
where T is the thicklless of the perturbing film, C is the
shorted-surface velocity, and A and B represent best fits to
calculated mass loading data.
As an example, consider a 1 500-A thick aluminum film on
ST quartz at 330 MHz. Using the values (471 B = -0.029067
and A
-0.0 1 3 3 3 X 1 0-3 yields DELTA 4.8 1 . Frequency
response curves for another cosine-squared-on-a-pedestal filter
using both single and double electrodes are illustrated in Fig. 20.
Note how mass loading can result in distortion without an
accompanying lowering of the insertion loss, and how effec­
tively double electrodes can suppress even the increased mis­
match caused by mass loading.
=
(7)
(8)
(9)
( 10 )
(11)
(12)
113)
( 14 )
[IS)
[ 16 )
1 17)
=
SUMMARY AND CONCLUSIONS
In this paper we have attempted to provide a brief introduc­
tion to the nature of surface acoustic waves, and have reviewed
some of the various material design parameters which must be
considered in order to obtain optimum SAW device performance.
A convenient summary of some of the basic data for many of
the popular surface wave orientations is given in Table I .
, Def"mitions o f each quantity can be found in the text. It is
hoped this summary of available information will provide a
unified source of basic design data a5 well as a list of references
to be consulted whenever additional information is needed.
1t 8 )
119)
(20)
[21 )
(22)
[23 1
[ 24 1
(251
Lord Rayleigh, "On waves propagated along the plane surface of
an elastic solid," Proc. London Math. Soc. , vol 1 7 , pp. 4-1 1 ,
1 88 5 .
R . M . White and F. W. Voltmer, "Direct piezoelectric coupling to
surface elastic waves," Appl. Phys. Lett. , vol. 7, pp. 3 1 4-3 1 6 ,
1 96 5 .
J . J . Campbell and W. R. Jones, "A method for estimating
optimal crystal cuts and propagation directions for excitation
of piezoelectric surface waves," IEEE Trans. Sonics Ultrason. ,
vol. SU· 1 5 , pp. 209-2 1 8 , Oct. 1 9 68.
W. R. Jones, J. ,J. Campbell, and S. L. Veilleux, "Theoretical
analysis of acoustic surface waves," H ughes Aircraft Co., Fullerton,
CA., Final Report FI 9628·69·0 1 3 2 , 1969, unpublished.
H. F. Tiersten, "Thickness vibrations of piezoelectric plates,
J. Acoust. Soc. A mer. , vol. 35 , pp. 5 3- 5 8 , 1 963.
H . Goldstein, Classical Mechanics . Reading, MA: Addison·
Wesley, 1 9 50.
I. A. Viktorov, Rayleigh and Lamb Waves. New York: Plenum
.
Press, 1 967.
A. J. Slobodnik, Jr., E. D. Conway, and R. T. Delmonico, Micro·
WQve Acoustics Handbook, vol. l A, Surface Wave Velocities,
AFCRL, Hanscom AFB, MA 0 1 7 3 1 , TR·73·05 97, unpublished.
J. H. Collins, H. M. Gerard, and H. J. Shaw, "High·performance
lithium niobate acoustic surface wave transducers and delay
lines," Appl. Phys. Lett. , vol. 1 3, pp. 3 1 2-3 1 3, 1 9 6 8 .
K. A . Ingebrigtsen, "Surface waves in piezoelectrics, J. Appl.
Phys., vol. 40, pp. 2 68 1-2686.
G. A. Coquin and H. F. Tiersten, "Analysis of the e xcitation and
detection of piezoelectric surface waves in quartz by means of
surface electrodes," J. Acoust. Soc. A mer. , vol. 4 1 , pp. 9 2 1 -939,
1 9 67.
P . H. Carr, P. A. DeVito, and T. L. Szabo, "The effect of tempera·
ture and doppler shift on the performance of elastic surface wave
encoders and decoders," IEEE Trans. Sonics Ultrason. , vol. SU· 1 9 ,
p p . 3 5 7-367, July 1 972.
M . B. Schulz, B. J. Matsinger, and M : G. Holland, "Temperature
dependence of surface acoustic wave velocity on Q quartz," J.
Appl. PhyiS., vol. 4 1 , pp. 1 -30, 1 9 70.
A. J. Siobodnik, Jr., "The Temperature Coefficients of Acoustic
Surface Wave Velocity and Delay on Lithium Niobate, Lithium
Tantalate, Quartz and Tellurium Dioxide," AFC RL, Hanscom
AFB, MA 0 1 7 3 1 , unpub lished.
A. J. Slobodnik, Jr., and E. D. C onway, "New high·frequency
high-coupling l ow-beam·steering cut for acoustic surface waves
on LiNbO. ," Electron. Lett. , vol. 6, pp. 1 7 1 - 1 72 , March 1 9 70.
K. Shi bayama, K. Yamanouchi, H . Sato, and T. Meguro, "Opti·
mum cut for V-cut LiNbO. crystal used as the substrate of
acoustic-surface·wave f"llt ers," this issue, pp. 5 9 5 - 5 9 7 .
G . R. Barsch a n d R. E . Newnham, "Piezoelectric Materials with
Positive Elastic Constant Temperature Coeff"lcients," Pe nnsylvania
State Univ., University Park, PA 1 6802 , AFCRL·TR·75·0 1 63 ,
Apr. 1 97 5 , unpublished.
W. R. Smith, H. M. Gerard, J. H. Collins, T. M. Reeder, and H . J .
Shaw, "Analysis of interdigital surface wave transducers b y use
of an equivalent circuit model," IEEE Trans. Microwave Theory
Tech. , vol. MTT· 1 7 , pp. 8 5 6-864, Nov. 1 969.
W. R. Smith, H. M. Gerard, and W. R. Jones, " Analysis and
design of dispersive interdigital surface wave transducers," IEEE
Trans. Micro WQve Theory Tech. , vol. MTT.20, pp. 45 8-4 7 1 ,
July 1 972.
R . H. Tancrelland F. Sandy, "Analysis of I nterdigital Transducers
for Acoustic Surface Wave Devices," Raytheon Research Division,
Waltham, M A, AFCRL·TR·73·0030, 1 9 7 3 , unpublished.
H. Gerard, M. Wauk, and R. Weglein, "Large time-bandwidth
product microwave delay line," Hughes Aircraft Co., Fullerton,
CA., Tech. Rep. ECOM·038 5 2 . Oct. 1 970 , unpublished.
G. W. Farnell, I. A. Cermak, P. Silvester, and S. K. Wong "Capac­
itance and field distributions for interdigital surface-wave trans·
ducers," IEEE Trans. Sonics Ultrason . • vol. SU - 1 7 , pp. 1 8 8 - 1 9 5 ,
July 1 970.
.
M . B. Schulz and J. H. Matsinger, "Rayleigh.wave electromechan·
icai" coupling constants," Appl. Phys. Lett. , vol. 20, pp. 367-369 ,
1 972.
F . S. Hickernell, "Zinc-oxide thin·l1Im surface·wave transducers,"
this issue, pp. 6 3 1 - 635 .
L. A. Coldren and H. J. Shaw, "Surface·wave long delay lines,"
PROCEEDINGS OF THE IEEE, VOL. 64, NO. 5 , MAY 1 976
595
lines," this issue. pp. 598-609.
( 2 6 1 A. J. Slobodnik. J r . • P. H. Carr. and A. 1. Budreau, "Microwave
frequency acoustic surface·wave loss mechanisms on LiNbO, ,"
J. Appl. Phys. , vol. 41, pp. 4380-4387, Oct. 1 970.
( 2 7 1 P. J. King and F. W. Sheard, "Viscosity tell$or approach to the
damping of Rayleigh waves·... J. Appl. Phys. , vol. 40, pp. 5 1895 1 9 0. Dec. 1 969.
[28 1 A. 1. Slobodnik , Jr., "Attenuation of microwave acoustic surface
waves due to gas loading,!' J. Appl. Phys. , "vol. 43, pp.
. 2 565-2568,
June 1 972.
[29 1 A. J . Slobodnik, Jr., and A. J . Budreau, "Acoustic surface wave
loss mechanisms on Bi12 GeO,o at microwave frequencies," J.
Appl. Phys. • vol. 43, pp. 3278-3283, Aug. 1 97 2 .
( 3 0 ) A. J . Budreau and P . H . Carr, "Temperature dependence o f the
attenuation of microwave frequency elastic surface waves in
quartz," J. Appl. Phys. , vol. 18, pp. 2 39-24 1 .. Mar. 1 97 1 .
1 3 1 ) T . L . Szabo and A. J . Slobodnik, Ji., "The effect of diffraction
on the design of acoustic surface wave devices," IEEE Trans
Sonics Ultrason . . vol. Su-20, pp. 240-2 5 1 , July 1 97 3 .
( 3 2 ) M . G. Cohen, "Optical study o f ultrasonic diffraction a n d focussing
in anisotropic media ," J. Appl. Phys. , vol. 38, pp. 382 1 -3828,
1 967.
[ 3 3 1 M . S. Kharusi and G . W. Farnell, "Diffraction and beam steering
" for surface·wave comb structures on anisotropic substrates,"
IEEE Trans. Sonics Ultrason. , vol. SU-18,- pp. 35-42 , Jan. 1 97 1 .
[ 34 1 A . 1 . Slobodnik, Jr., and T. L . Szabo, "Minimal diffraction cuts
for acoustic surface wave propagation on Bi 12 GeO , o , " J. Appl.
Phys. , vol. 44. pp. 2937-2941 , July 1 9 73.
[ 35 1 - , "Design of optimum acoustic surface wave delay lines at
microwave frequencies," IEEE Trans. Microwave Theory Tech.,
vol. M M T ·2 2 , pp. 458-462, Apr. 1 9 74.
[ 36 1 R. H. Tancrell, "Analytic design of surface wave bandpass filters,"
Optimum
IEEE 77an.r. Sonies Ultrason. , vol. SU-2 1 , p p . 1 2 -22 , Ian. 1 974.
T. L. Szabo and A. J. Slobodnik, Jr., "Diffraction compensation
in periodic apodized acoustic surface wave flIters," IEEE Trans.
Sonics Ultrason. , vol. SU-2 1 , pp. 1 14-1 1 9, Apr. 1974.
R. A. Waldron, "Power transfer factors for nonuniformly irra di­
ated interdigital piezoelectric transducers," IEEE Trans. Sonies
Ultrason. , vol . S U- 1 9 , pp. 448-453, Oct. 1 972.
T. L. Szabo, private communication, 1 975.
R . S. Wagers, "Spurious acoustic response in SAW devices,"
this issue, pp. 699-702 .
R. D. Weglein and E. D. Wolf, "The microwave realization of a
simple surface wave flIter function," in Int. Microwave Symp.
"
(37(
( 38 1
( 39 )
( 40 )
(4 1 )
Dig. , pp. 1 20-1 2 2 , June 1973.
(42 ) A. 1. Slobodnik, Ir., "UHF and microwave frequency acoustic
(4 3 )
( 44)
( 45 1
(46 1
(4 7 )
surface wave delay lines : Design ," AFCRL, Hanscom AFB,
MA 0 1 7 3 1 , TR·73-D538.
A. 1. Budreau, P. H . Carr, and K. R. Laker, "Frequency synthesis
using acoustic surface-wave flIters, Microwave J. , vol. 1 7 , pp. 6569, Mar. 1 974.
T. W . Bristol, W. R. Jones, P. B. Snow, and W. R. Smith, "Appli­
cations o f double electrodes in acoustic surface wave device
design," in Ultrasonics Symp. p,.oc. , pp. 343-345, 1 972.
P. H . Carr, " Reduction o f reflections i n surface-wave delay lines
with quarter-wave taps, Proc. IEEE (Lett.), vol. 60, pp. 1 1 031 1 04, Sept. 1 972.
R. H. Tancrell a n d R. C. Williamson, "Wavefront distortion of
acoustic surface waves from apodized interdigital transducers,"
Appl. Phys. Lett. , vol. 1 9 , pp. 456-459, 1 97 1 .
D . Penunuri and K. M. Lakin, "Surface acoustic wave velocities
of isotropic metal f'JIms on selected cuts of Bil1 GeO,. , Quartz,
AI, 0, , and LiNbO, ," IEEE Trans. Sonics Ultrason. , vol. SU-2 1 ,
pp. 29 3-295, Oct. 1 9 74.
Cut for Ro'tated V-Cut Li N b03 Crysta l
Used as the S u bstrate of Acousti c-Su rface-Wave
Fi lters
KIMIO SHIBAYAMA, KAZUHIKO YAMANOUCHI , HIROAlP SATO, AND TOSHIYASU MEGURO
Abstract-The existenc e of a new suppression cut to the most ob­
structive spuriou s component consisting of the -slower shear wave plOp­
agatating in a crystal has been experimentally found out for acoustic·
surface-wave propagation on LiNb0 3 • The plate is a 127.860 rotated
Y-cut X·propagating plate and has a large electromechanical coupling
coe fficien t.
This paper deals mainly with the experimental suppression
of the spurious component through RF pulse responses and
frequency-transmission characteristics of rotated Y-cut plates
cut at several angles near
EXPERIMENT
INTRODUCTION
IEZOELECTRIC
substrates
for
0
acoustic-surface-wave
filters and delay lines with 1 3 1 rotated Y-qut X·prop·
P agating crystalline lithium nio bate plates [ 1 ] , [ 2 1 are
widely used.
This is because of their superiority in electro·
mechanical coupling to Rayleigh waves and low beam steering
compared with other cuts.
However, an unknown spurious
signal generated on the substrate frequently prevents success­
ful experiments.
0
131 •
For filters, this leads to phenomena in which
the attenuation in the stopband cannot be guaranteed to be
sufficiently large.
Manuscript received November 4, 1975.
The authors are with the Research Institute o f Electrical Communica·
tion, Tohoku University , Send ai, Jap�n.
The experiments were performed using a plate rotated
from the Y axis about the X axis of a LiNb03 crystal.
0
0
The
10
0 , and their cut angles were
1 3 1 .88
specimens were obtained by cutting at intervals of about
from
8
==
0
1 23 .6 0 to 8
=
measured exactly by X-ray diffraction on the bases of the
0
(0, - 1 , 4 ) plane [ 3 ] , which is equal to the 1 27.86 cut plane.
Each specimen is 24 mm long, 1 5 mm wide, and about 2 mm
thick.
The dimensions o f the interdigital aluminum electrodes
34 fingers are 5 .2 5 mm in overlap finger length, 25 Jl.ID in
finger width, and 25 Iltn in fmger space, and the center-to­
with
center distance between launching and receiving electrodes is
1 0 mm. On the reverse side of these specimens, many grooves
were cut obliquely to the propagation axis in order to suppress
the unknown bulk waves reflected from the bottom.