Energy Education Science and Technology Part A: Energy Science and Research
2012 Volume (issues) 30(1): 143-158
A review of energy regeneration
capabilities in controllable
suspension for passengers’ car
Noor H. Amer1, Rahizar Ramli 1,*, Hazril M. Isa2, Wan Nor Liza Mahadi 2,
Mohd. Azman Zainul Abidin3
1
University Malaya, Advanced Computational and Applied Mechanics (ACAM) Research Group, Department of
Mechanical Engineering, Malaysia
2
University Malaya, Electromagnetic Radiation and Devices (EMRD) Research Group, Department of Electrical
Engineering, Kuala Lumpur, Malaysia
3
Proton Professor Office, PROTON Research Department, PROTON Headquarters, Shah Alam, Malaysia
Received: 09 August 2011; accepted: 12 October 2011
Abstract
In the past few decades, passive suspension system has been widely used in passenger vehicle
suspension system. The needs of improving ride and handling performance has fueled up significant
researches into controllable suspension which provide variable damping and controllable force to stabilize
the vehicle motions. This study reviews various research outcomes carried out in the advancement of
controllable suspension system and the prospect of energy regeneration within the suspension system.
There have been numerous studies being conducted on controllable suspension and most of them were
proven to improve ride and handling performance of a vehicle. Nonetheless, it requires the use of external
energy to power-up the suspension system. To overcome this, energy regeneration concept has been
introduced to supply additional power within the suspension system by harvesting energy from road
surface excitations. In realizing this concept, a suitable control scheme should be developed. The review
will cover the design aspect of energy regenerating controllable suspension and the development of its
control strategy. It is intended for future prospect of developing a new electromagnetic suspension with
energy regeneration capability.
Keywords: Active suspension; Semi-active suspension; Control strategy; Energy harvester; Energy
regeneration; Electromagnetic suspension
©Sila Science. All rights reserved.
_____________
Corresponding author: Tel.: +603-7967-7623; fax: +603-7967-5317.
E-mail address: rahizar@um.edu.my (R. Ramli).
144
N. H. Amer et al. / EEST Part A: Energy Science and Research
30
(2012)
143-158
1. Introduction
Suspension system improves passengers comfort in vehicle and minimizes the damage of
vehicle components caused by road irregularities. In the past few decades, suspension system for
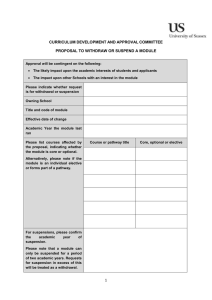
passenger vehicles has been dominated by the conventional passive suspension. As shown in Fig.
1, they can be modeled by a spring and damper in parallel; both with stiffness and damping
coefficients k1 and c1, connecting the wheels (unsprung mass with coefficients k2 and c2) and the
vehicle body (sprung mass). While its simplicity and cost effective features has been proven
beneficial, it can only provide limited damping and stiffness to the vehicle during maneuvers on
irregular road surfaces. Thanks to the increasing availability of supercomputers and fast
processors, controllable suspensions have been widely studied in the past few decades to provide
variable damping and forces to cater to these needs [1-6]. These systems can be categorized into
two main types; semi active and active suspension systems.
Fig. 1. Conventional passive “Quarter-car” suspension model.
Active suspension system has been studied since 1930s [7]. It consists of an actuator (usually
hydraulic, pneumatic or electromechanics) to produce force in the suspension system to control
the motion of the sprung mass and relative velocity between sprung and unsprung mass. Studies
related to this system can be found in [5, 8-13] and it has been successfully implemented into
actual production cars by several car manufacturers [14, 15]. However, few drawbacks have been
observed mainly due to its high cost and large power consumption. This leads to the concept of
semi-active suspension proposed by Karnopp et al [16] which provides more economical, lower
power requirement and simpler control algorithm. The main difference between the semi-active
and the active suspension is that semi-active suspension does not exert additional force. In other
words, while active suspension can dissipate and generate energy within the system, semi-active
can only dissipate energy. Instead of having an actuator as in active system, semi active system
consists of a controllable damper that will offer variable damping which provide better solution
than passive systems. Variable damping is achieved by varying resistant to fluid flow in the
damper by controlling valves opening or smart fluids (electrorheological and magnetorheological
fluids).
In a typical passengers’ vehicle, most of the energy generated by the powertrain will be
dissipated during braking, through internal friction within vehicle components and aerodynamic
drag during normal cruising. Approximately, only 10% of the generated energy was used
efficiently to power up the vehicle. In a typical suspension system, energy from external
N. H. Amer et al. / EEST Part A: Energy Science and Research
30
(2012)
143-158
145
excitations mainly caused by the road surfaced usually absorbed by the damper. This energy is
converted into heat energy within the damper fluid and dissipated to the surrounding. A lot of
efforts have been made to harvest this energy from the suspension and supply it to the main
powertrain for additional power supply and improved efficiency. Moreover, active suspension
system has been claimed to require high power supply to operate [16]. The regenerated energy
can be supplied to power up the suspension system itself. The contribution might be small but
with proper energy management and suitable control strategy, the accumulated energy can be
significant and useful.
This study reviews the efforts done by various researches in improving the performance of
vehicle suspension. In Section II, we will discuss various mechanisms used in previous studies on
controllable suspension systems. This is followed by the review of emerging technologies of
employing electromagnetic suspension (EMS) and its benefits in realizing the energy harvester
concept. The next section will focus on examining various control strategies implemented in
controllable suspension systems. In section 5, several control strategies used in energy
regeneration also critically reviewed.
2. Suspension mechanism
The choice of suspension mechanism is crucial before determining the control strategies to be
implemented. Mechanism of suspension will govern the delivery process of suspension forces to
the vehicle. This section will review various mechanisms usually employed in suspension unit to
provide damping and vibration isolation required by the vehicle system. The most common
suspension mechanisms are continuously variable damper, magnetorheological (MR) damper,
electrorheological (ER) damper, and electromagnetic actuator.
Generally, suspension systems for vehicle consist of spring and damper. They are used to
isolate the vehicle body from road disturbance and roll and pitch effect. Common type of damper
used is hydraulic damper because it is cheap and reliable [17]. Hydraulic dampers are also easy to
design, have high force density, and its parts are easy to find [18, 19]. However, due to constant
damping coefficient possessed by hydraulic damper, it has very low bandwidth that is, it is only
efficient in compensating low-frequency disturbances i.e roll and pitch of the vehicle. This is
proven by Gysen et al.[18] when anti-roll bar comprising of hydraulic actuator was successfully
prevented the roll and pitch movement of the car. Hydraulic damper do not successfully eliminate
the high-frequency disturbance i.e. disturbance due to road irregularities when the vehicle
transverse on a straight path [18]. So, the need of controllable damping force (semi-active and
active system) in suspension system is crucial since it can operate in wider bandwidth compared
to hydraulic damper. Generally, the main disadvantages of the hydraulic system are:
Considered inefficient due to the required continuously pressurized system.
Relatively high system time constant (pressure loss and flexible loss).
Environmental pollution due to hose leaks and ruptures, where hydraulic fluids are toxic.
Mass and intractable space requirements of the total system including supply system albeit that it
mainly contributes to the sprung mass.
To overcome the shortcoming of hydraulic damper, semi-active or active suspension system
can be employed. Semi-active suspension have received significant attention in recent years
because they offer the adaptability of active suspension without requiring large power sources, as
reported by Martins et al.[17] and Spencer Jr. et al.[20]. Semi-active suspension system for
vehicle was proposed in the early 1970s, which exhibit satisfactory performance compared to the
146
N. H. Amer et al. / EEST Part A: Energy Science and Research
30
(2012)
143-158
fully active system in improving ride quality [21]. One of the early controllable suspension
system has been introduced by Avner in his patent in 1967[22]. In his patent, variable damping
force was achieved by adjusting the orifice area in the oil-filled damper, thus changing the
resistance to fluid flow; however, since the design was utilizing a mechanical motion of valve
adjusting, the change of speed was expectedly slower. In 1988, Redfield and Karnopp [23]
analyzed active suspension performance sensitivity as a function of the system feedback gains on
a two degree-of –freedom vehicle model. Studies focusing on effects of active suspension system
on vehicle dynamics has been conducted by Rajamani and Hendrick [24], Fialho and Balas [25],
and Young Man and Rajamani [26]. However, these researches were focusing on the theoretical
aspects with ideal condition assumptions without considering practical part.
In 1947, Winslow [27] discovered the potential of controllable fluids when he published the
first electrorheological (ER) fluid patent and paper describing the ER effect. With this
technology, the usage of ER and magnetorheological fluids (MR) in suspension system was
introduced. The applicability of the controllable fluids in vehicle suspension system has been
explored throughout decades in various publications In 1992, Hare [28] produced a patent on
using ER damper for motor vehicle suspension system.. Choi et al. [29] uses 7 degrees-offreedom full-car model to investigate the performance of suspension system with ER damper. Wu
et al. [30] investigated various control strategies for suspension system with an ER damper using
computer simulation techniques as well as experimental set-up. As for MR damper , the
development of MR material was initiated by Rabinow in 1940s at the US National Bureau of
Standards [31]. Its application in vehicle suspension system was investigated by Yao [21] and Du
[32]. In 1995 and 1996, further studies on behavior of MR material has been done by Jolly et al.
[33] and Carlson et al.[34]. Both fluids have the same mode of operation. Polarizable particles
were added inside the fluids so that they could transform into chain-like fibrous structures in the
presence of a high electric/magnetic field. When the electric field/magnetic field strength reaches
a certain value, the suspension will solidify with a high yield stress. This will increase its resistive
force and thus increasing its damping capability. Conversely, the suspension can be liquefied and
return to its original liquid state by removing the electric field/magnetic field [21]. Between
these two fluids, MR fluid exhibits a much superior yield strength value i.e. around 100 kPa
compared to their electrical counterparts i.e. only around 5kPa thus making MR damper the first
choice for semi-active vibration control [21, 33, 34].
In 2001, Mirzaei et al.[35] proposed the idea of using tubular linear induction motor (TLIM)
in suspension system. The damping force is generated by linear actuator by interaction of
magnetic field by permanent magnet (or electromagnet) with current-carrying conductors. Unlike
previous mechanisms, linear actuator does not rely on any fluid to provide damping or auxiliary
forces thus eliminating any leaking problem that can be hazardous in day-to-day operations.
Based from Mirzaei’s study, The TLIM damping force is controlled by external direct-current
(DC) source and it’s in parallel with hydraulic oil and spring, just in case of power failure of
linear motor. In 2006, Paulides et al. [36]and Cech [37] proposed a series connection between
linear actuator and spring to eliminate low-bandwidth disturbance and parallel connection to
eliminate high-frequency disturbance. In reference to Gysen et al.[38], linear actuator can operate
in wider bandwidth compared to hydraulic actuator, thus eliminating both low frequency
disturbance (roll and pitch) and high frequency disturbance (potholes and bumpy road).
In 2010, Gysen et al.[18, 38] investigated in detail the applications of linear electromagnetic
motor in vehicle suspension system. The experiment was done by installing the linear
N. H. Amer et al. / EEST Part A: Energy Science and Research
30
(2012)
143-158
147
electromagnetic actuator (LEA) in parallel with a spring on a BMW car and the performance is
compared to hydraulic system. As a result, the linear actuator have isolated the road disturbance
and maintaining the road-tire connection more efficiently compared to hydraulic system.
However, the active force generated is not large enough to actively control the vehicle body
acceleration. Therefore, an alternative design of linear actuator is needed. The disadvantages of
using linear actuator in electromagnetic suspension system, as reported by Gysen et al. [18] are:
Increased volume of the suspension.
Relatively high current for 12-14V system.
Conventional designs need excitation to provide continuous force.
Bose Corp. [39] came out with an idea to implement linear electromagnetic actuator that acts
independently in vehicle suspension system, replacing hydraulic fluid and spring. The technology
is based on the basic principles of speaker technology. However, the design details is kept secret
by this company thus no further information can be obtained. Wang [40], Kou [41] and Bianchi
[42] have predicted the performance of linear actuator that suitable for vehicle suspension
system. However, the studies were conducted with various ideal assumptions that may not be
possibly realized in the real world.
In this section, the various types of electromagnetic suspension systems have been reviewed.
The hydraulic damper, adjustable valve inside the damper cylinder, MR and ER fluid and linear
actuator has been studied in detail. Based on the researches, the usage of linear actuator in vehicle
suspension system offers most advantages due to its controllable thrust force, possession of high
force density, and the ability to act as an energy harvester by converting kinetic (vibration)
energy to electrical energy either to be stored for future use, or fed back into the actuator. The
energy harvesting properties of linear actuator will be described in the next section. The reaction
time of linear actuator to produce damping force (or thrust force) is shorter than hydraulic
actuator due to fluid properties thus making suspension system using linear actuator yields better
time response. However, due to high cost, high volume, and complexity, linear actuator is not
widely used in conventional cars. Therefore, further research on minimizing the cost, volume and
complexity will be addressed.
3. EMS as energy harvester
Possibilities on employing linear actuator in electromagnetic suspension system as energy
harvester in automotive sector were rarely studied. This may be caused by the advanced
technology in hybrid vehicle that is sufficient enough to curb the fuel consumption problem.
However, linear motor has been used widely in other sectors that involve energy regeneration
such as harvesting wave energy from sea [43], [44]. In automotive sector, besides providing
better driving quality, linear motor (or linear generator) also used to generate electrical energy
from vehicle body vibration. The vibration energy is converted into electrical energy by means of
magnetic induction. One of the studies was conducted by Okada and Harada[45]. In their
research, they have replaced the hydraulic damper with linear generator in quarter-car model.
They have synthesized some formula representing the frequency response of the system before
doing the simulation to obtain the regenerated energy. They concluded that energy harvesting
only possible when linear generator is moving with high frequency. For low frequency, the
energy produced by linear generator is zero i.e. the linear generator is unable to regenerate
energy.
148
N. H. Amer et al. / EEST Part A: Energy Science and Research
30
(2012)
143-158
Montazeri and Soleymani [46] have conducted another research on energy harvesting using
EMS. They investigated the idea of the energy regeneration in active suspension unit in hybrid
electric vehicles. An ultra capacitor (UC) has been introduced as energy storage device due to its
specific power and the ability to tolerate the frequent charging and discharging without the risk of
increasing internal heat and resistance, thus suitable for storing the harvested energy. The study
also investigated the relationship between active suspension and fuel consumption in which,
through simulation and experiment, hybrid electric vehicles with regenerative active suspension
consumes less fuel compared to hybrid electric vehicles with non-regenerative active suspension
but higher compared to hybrid electric vehicle without active suspension system. Hsu [47]
investigated the relationship between linear actuator performance and power recovery in vehicle
electromagnetic suspension system.
Martins et al.[17] proposed a combination of active and passive electromagnetic suspension
system for vehicle. The simulation was performed by applying disturbance signal (emulating the
road irregularities) to the quarter-car model to observe the force and power response. As a result,
they have obtained a sinusoidal instantaneous power generated by each suspension on the
vehicle. A pure passive electromagnetic suspension system has been designed by Paz [48]. In the
research, linear generator was designed to be implemented on the vehicle suspension system to
generate energy due to road disturbance. However, the calculated parameters were validated
through simulation only with no experimental set-up being carried out. Without experimental
data, the design can be considered incomplete. Furthermore, in the simulation, many parameters
were assumed to be ideal whereas in experimental aspect, this is not the case and most of the
parameters are depending to the environment conditions.
4. Control strategies in controllable suspension
One of the main challenges in controllable suspension is to choose the most suitable control
strategy for the system. This section will review the implementation of several control strategies
in the design of active and semi-active suspension over the years based on the linearity of
suspension/vehicle model of the system to be controlled.
Any system is linear when the input and output are proportional to each other. For example,
spring and dampers in passive suspension has a linear characteristic and proportional to
displacement and velocity respectively. Also, active suspension studies may use electric linear
motor [10] as actuator to maintain linearity in the vehicle model. However, if the output cannot
be written as linear combination of its input, the system is said to be non-linear. For example,
studies by Hyun-Chul et al. [49] and Basari [50] used non-linear models of quarter car with
MacPherson strut suspension to ensure the study will be as close as possible to the real case.
Also, most variable dampers and actuators used in controllable suspensions inherit the
nonlinearity properties. For example, the behavior of continuous variable damper is governed by
valve openings and variable viscosity smart fluids and their operating processes inherit
nonlinearity aspects into dampers properties. Linear interpolation of these processes will only
valid under certain conditions and under extreme velocity, unpredictable results will be observed
[51]. Based on chaos theory, a little change in the input of a nonlinear system may cause
unpredictable and complex effects to its output, increasing the complexity of the controller
needed to govern the system itself [52]. Due to this point, control strategies governing linear and
nonlinear systems should be considered separately.
N. H. Amer et al. / EEST Part A: Energy Science and Research
30
(2012)
143-158
149
In this section, symbols and abbreviations will be based on the same notation as in Fig. 1
Fig. 1. Conventional passive “Quarter-car” suspension model unless stated otherwise.
Additional nomenclatures will be explained within the paragraphs.
4. 1. Control strategies for linear system
4. 1. 1. Skyhook control and other switching algorithm approach
Due to its simple algorithm, this is undoubtedly one of the most popular semi-active control
strategy used. The concept of skyhook control has been originated in 1974 by Karnopp et. al.
[16], based on a fictitious controllable damper placed between the vehicle body and a stationary
sky. In practical, the concept can be modeled by two main control algorithms; two-state (on/off)
control strategy, studied in [53-55] and linear variable damping skyhook control, studied in [49,
56]. In two-state skyhook control, the damper will only have a maximum and minimum (usually
zero or very small) damping state, ctwo-state, which is cmax and cmin respectively. In linear skyhook
control, a continuous variable damper is employed which will provide any damping values,
clin(t) between cmax and cmin. The control algorithm employed to determine the suitable values will
be based on the relative motion between its unsprung mass and sprung mass. If the relative
velocity and body velocity is in the same direction, which will give a positive value for its
product, maximum damping should be produced. On the other hand, if the vehicle body and the
relative motion are not in the same direction, minimum damping force should be produced.
Fig. 2 illustrates the skyhook control algorithm can be summarized in Eq.
Error! Reference source not found. and Eq. Error! Reference source not found. [56]. Here,
is saturation operator for the continuous variable damper used in linear skyhook
control.
Fig. 2. Concept of Skyhook damping.
if x1 x1 x2 0
if x1 x1 x2 0
if x1 x1 x2 0
if x1 x1 x2 0
ctwo state cmax
ctwo state cmin
clin t sat cmax x1 x2 1 cmax x1
cmin ,cmax
clin t cmin
(1)
(2)
Skyhook control has been proven to improve the ride characteristics by reducing body
acceleration [55, 57, 58]. Canale et al. [59], used skyhook control results for comparison to
150
N. H. Amer et al. / EEST Part A: Energy Science and Research
30
(2012)
143-158
validate their proposed control strategies. However, due to its focus on improving ride quality,
the road holding performance is very limited. In 1996, ground-hook control theory has been
proposed to improve road holding capabilities for controllable suspensions [4]. In this theory, the
fictitious damper is placed on a stationary ground instead of sky which will give consideration to
road handling capabilities to suspension system. Control algorithm can be summarized as in Eq.
Error! Reference source not found.. This control scheme mainly applied to truck and heavyvehicle due to the importance of minimizing tire load contributions [60]. In 2005, Ahmadian et.
al. [61] introduced the concept of hybrid control that integrate both skyhook and groundhook
control with tunable gain which can take advantage on both control’s benefit. The practical
application of this type of controller has been investigated by Hyun-chul et al. [49] to control a
MacPherson suspension system. This study also considered a modified skyhook control which
proposes a controllable damper in addition to the skyhook damper. The control algorithm
contains weighting factor that will assign suitable damping coefficient depending on road input
frequencies.
if x2 x1 x2 0
if x2 x1 x2 0
c cmax
c cmin
(3)
Savaresi et al. [56] investigated the use of body acceleration instead of body velocity for its
switching algorithm that resembles skyhook control which proven to give remarkable
performance when compared to passive suspension. Another interesting switching algorithm,
MiniMax control were studied in [57]. The algorithm will switch damping state between hard or
soft based on current shock absorber state (compressed or stretched) and also wheel loading
condition (whether there are increase or decrease in wheel loading). This controller was
compared with skyhook controller and it was shown that MiniMax control improved road
handling characteristics which skyhook control lacks.
4. 1. 2. Optimal control
Studies and applications of optimal control have been recorded since early 1970s. Hrovat et.
al. [4] has reviewed optimal control applications on various setups of controllable suspension.
Extensive studies on optimal control applied in semi active, active and also slow active
suspension can be seen in [62, 63]. The most common optimal control methods are the Linear
Quadratic Regulator (LQR), Linear Quadratic Gaussian (LQG), and Model Predictive Optimal
Control (MPC). Different performance index were introduced with different kind of optimization
algorithm to solve the optimal problem. The concept of this type of control strategy is to optimize
a set of different performance parameters (which usually are body acceleration, suspension travel
and wheel-road interactions) modeled as linear quadratic performance index detailed in [63, 64].
Different approaches have been utilized for the purpose of optimizing these performance indexes.
In [65], an LQR approach with an optimal gain matrix was used in active suspension system of
a 7-DOF full vehicle model. The gain matrix was obtained by optimizing an extensive cost
function which integrates all ride and handling performances including bounce and pitch motions
(12 parameters). To solve the optimal problem, the study utilizes a distributed computing
network to calculate optimized parameters for all four part of the vehicle (front, rear, left and
right). Zhang et al. [66] uses genetic algorithm to optimize the gain matrix in the LQR controller
N. H. Amer et al. / EEST Part A: Energy Science and Research
30
(2012)
143-158
151
used in the study. The GA method was proven beneficial as to improve the LQR controller
performance.
Zhu et al. [8] studied LQG method to be used as an active suspension controller in a softwarein-the-loop (SIL) simulation set-up. The design of LQG controller was detailed and its
application in the SIL was explored. Furthermore, in 2006, Peng et. al. [67] employ a complex,
real time LQG controller to a hardware-in-loop (HIL) semi active suspension system setup using
Magneto-Rheological (MR) damper.
In MPC strategy, a model that represents the optimal suspension system is designed which will
be evaluated and optimized for each sampling time, t. This strategy has been studied and
reviewed in [68, 69]. In 2006, Canale et al. [59] argued on the effectiveness of this strategy that
the exhausting algorithm makes this type of controller impractical. Due to this problem, they
utilized a “fast” MPC algorithm that was proven to save 44% on mean computational time
required compared to a normal MPC strategy and shown significant improvement in ride
performance compared to a skyhook approach. Study in [70] (and the references within)
however used preview information of incoming road instead of using a vehicle suspension model.
The semi-active suspension were applied at rear wheel of the vehicle and based on road
measurement recorded from front wheels, the road excitation is modeled as a delayed signal so
that the rear suspension can provide suitable reaction to isolate vehicle body from this excitation.
Improvement in body acceleration was observed but always with an increase in tire load. Also,
from the testing on rounded pulse road input, the performance cannot be improved with this
approach. Consideration for using this approach in an active controller also been detailed in this
study.
4. 2. Control strategies for nonlinear system
Vehicle system suspension behavior always assumed to be linear to ease the process of coming
out with a mathematical model to predict the state and control its processes [4, 5]. The studies of
suspension control behavior should use the nonlinear representation to ensure its effectiveness
and robustness under various conditions (vibration frequencies, velocities, etc.). Basari [50]
include nonlinear MacPherson suspension quarter car model and controlled it with a robust
controller using back-stepping technique. In [71], they used feedback linearization to linearize
force/velocity response of MR damper which enables them to use a linear approach, skyhook
control. This was done by employing feedback gain and feed-forward gain in the feedback
controller.
One of the controller model used is adaptive controller. Adaptive control uses the vehicle state
to adapt with varying condition the vehicle undergoes. Common approach used is feed-forward
and feedback where the vehicle state is fed into the controller to calculate the suitable response.
In 2008, Jiangtao et. al. [5] reviewed on intelligent methods for adaptive control. They examined
fuzzy logic, neural network and genetic algorithm to be employed in adaptive control. These
approaches were applied into the adaptive controller to contribute ‘brain and experience’ to
calculate better responses.
Applications of LPV/H∞ controller were demonstrated by [51, 72, 73] with the additional of
anti-roll distribution control by feedback-feedforward approach in [73]. To apply this approach,
nonlinear vehicle model was transformed and reformulated into a Linear Parameter-Varying
(LPV) system that involve gain scheduling parameters which will be suitable with H∞ framework
controller. The transformation makes this type of controller to be a robust controller suitable for
152
N. H. Amer et al. / EEST Part A: Energy Science and Research
30
(2012)
143-158
ever-varying suspension system. In [10], an interesting study involving H∞ controller with full
vehicle model were carried out. Different controller setup (quarter, half and full H∞ controller)
were applied on the full vehicle model to observe the effectiveness of each setup. They concluded
that a simple quarter car H∞ controller setup provides the best result in ride and comfort
performance compared to half and full car H∞ controller setups.
For the past few years, the implementation of fuzzy logic controller (FLC) can be observed in
several studies [74-77]. FLC controller determines suitable response based on a lookup table/data
and rules which designed based on human experienced dealing with different conditions. The
functionality of FLC was explained with great detail by Chen et. al. [74] using a 2-input-1-output
rule base. The input considered is error of body acceleration, E and the change in error, EC to
dictate the output control force. In [77], a lookup table was designed using the suspension
deflections and sprung mass velocity to provide the control forces needed under current situation.
Danesin et. al [76] demonstrate the use of FLC with Real Time Damper subsystem in
MATLAB/SIMULINK simulations.
5. Control strategies in controllable suspension with energy harvester capabilities
In developing control strategy for controllable suspension, the processes can be divided into
two stages. The first stage governs the amount of force should be delivered by suspension to the
vehicle for stabilized responses. This usually denoted by “ideal control force” or “required
control force”. The second stage governs the process to deliver the required force to vehicle. This
stage would ensure that the output force from suspension follows the “ideal control force” from
first stage as accurately as possible. These stages can be explained figuratively as in
Fig. 3.
Fig. 3. Simplified explanations on different stages in control development.
Similar to previous section, this section will use symbols and abbreviations based on the
same notation as in
Fig. 1. Conventional passive “Quarter-car” suspension model
Fig. 1 unless stated otherwise. Additional nomenclatures will be explained within the paragraphs.
The main idea of energy harvester within suspension system is to absorb as much energy as
possible from road surface excitations and store it for future use or to be fed back into the
suspension unit as a power source. From previous simulation observations, a normal passenger
car cruising on a poor road surface at speed 13m/s can dissipate up to 200 W of power from all 4
dampers of its suspension [78, 79]. A typical active suspension system would require about 5 HP
N. H. Amer et al. / EEST Part A: Energy Science and Research
30 (2012)
143-158
153
of power (3.7kW) [45]. Gysen et al. [12] claimed that their proposed active EMS requires
damping power of maximum 2kW but only 16W RMS was needed in normal cruising city
driving. To supply power to these systems, total energy that can be harvested by the suspension
varies depending on the driving conditions and road surface. Recently, Lei et al. [80] concluded
that their proposed EMS can harvest 16-64 W with suspension velocity range of 0.25 – 0.5 ms-1.
In this case, Lei’s EMS energy harvester can actually power up Gysen’s active EMS suspension.
However, without a suitable control scheme, the realization of this idea is nearly impossible.
In 1996, Okada et al. [45] presented a general concept of regenerative energy that can be
applied to any suspension system for buildings or vehicles. They proposed a suspension system
consists of an electro-dynamic actuator with a new control scheme to harvest energy and isolate
vibrations. This suspension will be operating in two distinct modes characterized by the vibration
frequency imposed by the road input to the actuator. These modes are regeneration and pure
suspension (active or passive). To distinguish between the two modes, speed of the actuator
motions was used as switching trigger between regeneration mode and active/passive suspension
mode. In the case of high frequency vibrations (high speed motion), the suspension will be
regenerating energy from the excitations. The energy was used for additional power source for
the suspension unit besides the primary battery. In this study, low frequency vibrations range was
described as dead zone due to the inability of the suspension to regenerate energy within this
region. The actuator will be switched to passive damper mode or active suspension and power
was supplied fully by the primary battery. In passive damper mode, the actuator will exert a fixed
breaking (damping) force with equivalent damping coefficient of
2
R
where is the actuator
coefficient and R is the electrical resistance connected to the actuator. In active mode, the
actuator will exert variable force governed by displacement and velocity of the sprung mass,
f (t ) K p x1 Kv x1 where Kp and Kv are displacement and velocity feedback gains respectively. The
results indicate a good agreement between simulation and experimental data which points out a
high possibility of energy harvesting within suspension system that will have good damping
properties and energy harvesting capabilities. However, this study requires a highly efficient
actuator to ensure the desired force transmitted to the vehicle system since the control system was
done only in first stage.
In 2003, Nakano et al. [81] propose an active suspension using a DC linear motor with energy
harvesting capability. Previously in Okada et al. study, the energy regenerated was used on the
spot as power supply for the suspension unit. Differently, Nakano et al. include a condenser
which acts as a buffer that stores the regenerated energy. They stated that for a good energy
harvesting system, it should regenerate more power than it consumes. They carried out an energy
balance analysis for consumed and regenerated energy using the system’s dynamical property of
the system, the feedback gain of the active controller, the specification of the actuator, and the
power spectral density of disturbance. A contour plot of power consumption was developed from
this analysis and they came out with a feasible design of the self-powered active suspension. The
control strategy employed skyhook theory to determine the desired force (first stage control) and
its parameters was quantified by the ratio, n between skyhook feedback gain, csky and equivalent
damping coefficient of the actuator, ceq. Vibrations isolation performance was claimed to be
better with larger n. Energy harvesting procedures were carried out in the second stage of the
control strategy. A switching circuit with variable resistance was developed for this stage. They
introduced a mode variable as the switching trigger. is a function of actuator speed, ceq, and
154
N. H. Amer et al. / EEST Part A: Energy Science and Research
30
(2012)
143-158
actuator force. Three modes were introduced based on the values of . For 0 1 , the
suspension will be switched to “regeneration” mode where the actuator regenerates energy from
vibration and delivers it to the condenser. The variable resistance was tuned to produce control
force equal to the desired value. When 0 the suspension should be in “drive” mode where it
produces damping force using power stored in the condenser. Alternatively, when 1 the
suspension will enter “brake” mode where it increases its damping force using both power from
condenser and also primary power supply. Experimental and simulation results showed that a
self-powered active suspension system is achievable when designed with an energy balance
analysis. Also, with n = 0.5, the actuator was able to produce the desired force output more
accurately.
In 2005, Okada et al.[82] published an improvised version of the 1996 study where they
introduced a pulse width modulator (PWM) step up chopper that enables the suspension to
regenerate energy even in the dead zone region. The PWM duty ratio governs the damping
characteristic of the suspension system and changeable via dSPACE software in onboard
computer. Also, they employed a more systematic control strategy which uses linear quadratic
(LQ) control theory to calculate the desired force, f * (first stage control). In the second stage, a
new control strategy was introduced for the energy flow from battery/regenerated energy to
suspension with different switching circuit than in Nakano et al. with a novel switching
algorithm. Here, only two modes exist, depending on whether the system able to regenerate
energy or not. The suspension system was available for energy harvesting when
2
R2
x12 f * x1 0
where the symbols carry the same meaning as above. In this mode, damping force is powered by
regenerated energy. Otherwise, the damping force from actuator would be generated by batteries.
In this study, the regenerated energy was still not enough to power-up the system and vibration
reduction performance observed were still not satisfactory enough. These were due to the fact
that the process of changing the PWM duty ratio is slow using dSPACE interface. Lack of energy
storage buffer as employed in Nakano et. al study previously may also be the cause that can be
investigated further as a new research prospect.
In 2007, Kawamoto et al. [83] proposed an interesting solution that employed an
electromagnetic damper EMD consists of a DC motor and the ball screw mechanism. The damper
then was coupled with a spring and forms an electromagnetic system (EMS). In the study, they
outlined the derivation of mathematical model for the EMD and carry out a two-stage control
strategy on the suspension system. In the first stage, they use velocity feedbacks to calculate the
ideal control force, f (t ) Cs x1 Cu x2 where Cs and Cu are velocity feedback gains of sprung and
unsprung mass respectively and x1 and x2 are sprung mass and unsprung mass velocity
respectively. This is a combination between skyhook and goundhook control theory as discussed
in previous section where a positive Cs denotes a good vibration isolation property (skyhook
attributes) and negative Cu denotes a good road holding property (groundhook attributes). To
ensure the EMS exerts force accurately, they employed PI controller to the EMD. An energy
saving algorithm was proposed as future development in this study which was followed up in
2008 [84]. In the study, they produced a contour map performance evaluation of the EMS in
terms of vibration isolation and maneuverability. With this, they proved the existence of energy
regeneration region for the system and suitable gains setting to achieve this.
Recently in 2010, Montazeri and Soleymani [46] proposed a novel energy harvester system
N. H. Amer et al. / EEST Part A: Energy Science and Research
30 (2012)
143-158
155
for active suspension intended for Hybrid Electric Vehicle (HEV). The study involved a
simultaneous simulation that links the vehicle suspension and powertrain. This will provide a
clearer view to study the impact of active suspension power demand on the HEV fuel
consumptions. Fuzzy based rules were used in the active suspension control strategy to determine
the ideal control force (first stage control). The same control approach also used in the power
management within the power train to ensure the internal combustion engine (ICE) operates at its
optimal operating points. Moreover, they propose a novel hybrid energy storage system (ESS)
that incorporate electro-chemical ultra capacitor which has superior energy storage properties
compared to electrochemical battery. This system was proven to improve the efficiency and the
lifespan of the HEV batteries. The results also showed an increase in HEV fuel consumption and
emission when active suspension was employed but with energy regeneration, the power demand
was decreased and the increase in fuel consumption and emission was compensated.
Eventhough there were significant researches been conducted throughout decades, the field is
still new in developing a specific control strategies for tubular permanent magnet linear motors.
Most of the control strategies presented here was developed in the first stage which will
determine the ideal force to be transferred into suspension system. Second stage of control which
will govern the process of delivering this force into the system will be specific to an individual
suspension mechanism.
6. Conclusion and future work
Throughout this paper, detailed review has been conducted discussing developments of controllable
suspension for passengers’ vehicle system. While focusing mainly on energy regenerating capabilities of
the suspension, this review covers the design aspect and control strategy commonly employed in the
controllable suspension field. Also, nonlinearity problem in modeling and control application has been
briefly addressed. The prospect of employing electromagnetic concept in the suspension system can be
beneficial in the future. High requirement of power consumed by the system can be compensated by the
ability to regenerate energy from external excitations by road surface. In the near future, it can be an
interesting research direction to develop a new control strategy focusing on a novel design of EMS.
Second stage control strategy with energy regeneration capability should be investigated specifically for
the EMS as discussed in Section V. A successful control strategy development will ensure the practicality
and improved efficiency of a self powered active suspension system.
Acknowledgement
Noor. H. Amer would like to acknowledge the support from National Defense University of Malaysia
and also the Ministry of Higher Education of Malaysia.
References
[1] Hedrick JK, Wormley DN. Active suspensions for ground transport vehicles - A state of the art review. Mech
Transp Syst AMD 1975;15:21−340.
[2] Goodall RM, Kortum W. Active controls in ground transportation - A review of the state-of-the-art and future
potential. ASME Veh Syst Dyn 1983;12:225−257.
[3] Sharp RS, Crolla DA. Road vehicle suspension system design - A review. Vehicle System Dynamics:
Int J Veh Mech and Mob 1987;16:167−192.
[4] Hrovat D. Survey of advanced suspension developments and related optimal control applications.
Automatica 1997;33:1781−1817.
[5] Jiangtao C, Honghai L, Ping L, Brown DJ. State of the art in vehicle active suspension adaptive control systems
based on intelligent methodologies. Intell Transp Syst 2008;9:392−405.
156
N. H. Amer et al. / EEST Part A: Energy Science and Research
30
(2012)
143-158
[6] Amer NH, Ramli R, Mahadi WNL, Abidin MaZ. A review on control strategies for passenger car intelligent
suspension system. Int Conf on Electr, Control and Comp Eng (INECCE), pp. 404–409, 2011.
[7] Yi K, Wargelin M, Hedrick K. Dynamic tire force control by semi-active suspensions. ASME Dyna Syst
Control 1993;44:299−310.
[8] Zhu D-L, Qin J-Y, Zhang Y, Zhang H, Xia M-M. Research on co-simulation using ADAMS and MATLAB for
active vibration isolation system. Int Conf Intell Comp Tech Auto (ICICTA) 2010;2:1126–1129.
[9] Hassanzadeh I, Alizadeh G, Shirjoposht NP, Hashemzadeh F. A new optimal nonlinear approach to half car
active suspension control. IACSIT Int J Eng Tech 2010;2:78–84.
[10] Kruczek A, Stříbrský A, Honců J, Hlinovský M. Controller choice for car active suspension Int J Mech
2009;3:61–68.
[11] Biczel P, Koniak M, Rasolomampionona DD, Anwar S, Favier P. Design of power plant capacity in DC hybrid
system and microgrid. Energ Educ Sci Tech-A 2011;27:221–232.
[12] Saidur R, Lai YK. Nanotechnology in vehicle’s weight reduction and associated energy savings. Energ Educ Sci
Tech-A 2011;26:87–101.
[13] Gysen B, Janssen J, Paulides J, Lomonova EA. Design aspects of an active electromagnetic suspension system
for automotive applications. IEEE Ind App Soc Annu Meeting, pp. 1–8, 2008.
[14] Michelin. (2008, 2/12/2010). Michelin active wheel press kit. Available:
http://servicesv2.webmichelin.com/frontnews/servlet/GetElement?elementCode=54609
[15] Bose-Corporation. (22/11/2010). Bose suspension system. Available:
http://www.bose.com/pdf/technologies/bose_suspension_system.pdf
[16] Karnopp DC, Crosby MJ, Harwood RA. Vibration control using semi-active force generators. ASME J Eng
Ind 1974;96:619–626.
[17] Martins I, Esteves M, Pina Da Silva F, Verdelho P. Electromagnetic hybrid active-passive vehicle suspension
system, IEEE 49th Veh Tech Conf, pp. 2273–2277, 1999.
[18] Gysen BLJ, Paulides JJH, Janssen JLG, Lomonova EA. Active electromagnetic suspension system for improved
vehicle dynamics. IEEE Trans Veh Tech 2010;59:1156–1163.
[19] Kruczek A, Stribrsky A. A full-car model for active suspension - some practical aspects. Proc of IEEE Int Conf
on. Mech (ICM), pp. 41–45, 2004.
[20] Spencer Jr. BF, Dyke SJ, Sain MK, Carlson JD. Phenomenological model for electromagnetic dampers. J Eng
Mech 1997;123:23–252.
[21] Yao GZ, Yap FF, Chen G, Li WH, Yeo SH. MR damper and its application for semi-active control of vehicle
suspension system. Mechatronics 2002;2:963–973.
[22] Avner AD. Hydraulic dampers for vehicle suspensions, US Patent 3338347, 1967.
[23] Redfield RC, Karnopp DC. Performance sensitivity of an actively damped vehicle suspension to feedback
variation. Amer Control Conf 1988;2406–2414.
[24] Rajamani R, Hedrick JK. Adaptive observers for active automotive suspensions: Theory and experiment. IEEE
Trans Control Syst Tech 1995;3:86–93.
[25] Fialho I, Balas GJ. Road adaptive active suspension design using linear parameter-varying gain-scheduling.
IEEE Trans Control Syst Tech 2002;10:43–54.
[26] Young Man C, Rajamani R. A systematic approach to adaptive observer synthesis for nonlinear systems. IEEE
Tran Automot Control 1997;42:534–537.
[27] Winslow WM. Method and means for translating electrical impulses into mechanical force, US Patent, 1947.
[28] Hare S. Electro-rheological shock absorber, US Patent 5161653, 10th November 1992, 1992.
[29] Yucai Z, Huimin Z. An object linking and embedding process control-based interconnection method for
distributed control system and simulation system in Power station. Energ Educ Sci Tech-A 2011;28:55–62.
[30] Wu XM, Wong JY, Sturk M, Russell DL. Simulation and experimental study of a semi-active suspension with
an electrorheological damper. Int J Mod Phys B (IJMPB) 1994;8:2987–3003.
[31] Robinov J. The magnetic fluid clutch. Trans Am Inst Electr Eng 1948;67:1308–1315.
[32] Du H, Sze KY, Lam J. Semi-active h(infinity) control of vehicle suspension with magneto-rheological dampers.
J Sound Vib 2005;283:981-996.
[33] Jolly MR, Carlson JD, Munoz BC. A model of the behaviour of magnetorheological materials. Smart Mat Struct
1996;7:613–622.
[34] Carlson JD, Catanzarite DM, St. Clair KA. Commercial magneto-rheological fluid devices, Int. Conf . on ER,
MR Suspensions And Assoc Tech, 1995.
N. H. Amer et al. / EEST Part A: Energy Science and Research
30 (2012)
143-158
157
[35] Mirzaei S, Saghaiannejad V, Tahani V, Moallem M. Electromagnetic shock absorber, IEEE Int Electr Mach and
Drives Conf (IEMDC), p. 5, 2001.
[36] Paulides JJH, Encica L, Lomonova EA, Vandenput AJA. Design considerations for a semi-active
electromagnetic suspension system. IEEE Trans Magn 2006;42:3446–3448.
[37] Cech I. A slow acting in series active suspension. Veh Syst Dyn 1987;16:17–26.
[38] Gysen BLJ, Janssen JLG, Paulides JJH, Lomonova EA. Design aspects of an active electromagnetic suspension
system for automotive applications. IEEE Trans Ind Appl 2009;45:1589–1597.
[39] Jones WD. Easy ride: Bose corp uses speaker technology to give cars adaptive suspension. IEEE Spectrum
2005;42:12-15.
[40] Wang J, Jewell GW, Howe D. A general framework for the analysis and design of tubular linear permanent
magnet machines. IEEE Trans Magn 1999;35:1986–2000.
[41] Kou B, Zhang C, Yan B, Cao H. Detent force analysis and suppression of electrical shock absorber. Veh Power
Propul Conf 2008.
[42] Bianchi N, Bolognani S, Corte DD, Tonel F. Tubular linear permanent magnet motors: An overall comparison.
IEEE Trans Ind Appl 2003;39:466–475.
[43] Polinder H, Mecrow BC, Jack AG, Dickinson PG, Mueller MA. Conventional and TFPM linear generators for
direct-drive wave energy conversion. IEEE Trans Energy Convers 2005;20:260–267.
[44] Mahlia TMI, Saidur R, Yanti PAA, Masjuki HH. Role of energy guide labels in consumers purchase
decision for household electrical appliances. Energ Educ Sci Tech-A 2011;27:95–104.
[45] Okada Y, Harada H. Regenerative control of active vibration damper and suspension systems. 35th IEEE Decis
Control 1996;4:4715–4720.
[46] Montazeri-Gh M, Soleymani M. Investigation of the energy regeneration of active suspension system in hybrid
electric vehicles. IEEE Trans Ind Electron2010;57:918–925.
[47] Hsu P. Power recovery property of electrical active suspension systems. Energy Convers Eng Conf
1996;3:1899–1904.
[48] Paz OD. Design and performance of electric shock absorber. MSc in Electrical Engineering. Louisiana State
University 2004.
[49] Hyun-Chul S, Keum-Shik H, Hedrick JK. Semi-active control of the macpherson suspension system: Hardwarein-the-loop simulations. IEEE Int Conf Control Appl, pp. 982–987, 2000.
[50] Basari AA. Modeling and control of nonlinear active suspension system using a backstepping technique MEng,
Dissertation. Universiti Teknologi Malaysia 2006.
[51] Yabanova I, Yumurtaci M, Kecebas A. Development of pid and fuzzy logic controller simulator for control
systems education. Energy Educ Sci Technol Part B 2012;4:67–76.
[52] Kellert SH, In the wake of chaos: Unpredictable order in dynamical systems: University of Chicago Press, 1993
[53] Ahmadian M, Song X, Southward SC. No-jerk skyhook control methods for semiactive suspensions. J Vib
Acoust 2004;126:580–584.
[54] Emura J, Kakizaki S, Yamaoka F, Nakamura M. Development of the semi-active suspension system based on
the sky-hook damper theory. SAE Paper 940863. 1994;17–26.
[55] Williams R. Automotive active suspensions part 1: Basic principles. Proc IMechE Part D J Automob Eng
1997;211:415–426.
[56] Savaresi SM, Silani E, Bittanti S, Porciani N. On performance evaluation methods and control strategies for
semi-active suspension systems. 42nd IEEE Conf on Decis Control 2003;3:2264–2269.
[57] Zhang H, Winner H, Li W. Comparison between skyhook and minimax control strategies for semi-active
suspension system. WASET 2009;624–627.
[58] Ieluzzi M, Turco P, Montiglio M. Development of a heavy truck semi-active suspension control. Control Eng
Pract 2006;14:305–312.
[59] Canale M, Milanese M, Novara C. Semi-active suspension control using “fast” model-predictive techniques.
Control Syst Tech 2006;14:1034–1046.
[60] Ramli R. Dynamic simulation of semi-active suspension systems for durability analysis. PhD Dissertation.
University of Leeds 2007.
[61] Ahmadian M, Goncalves FD, Sandu C. An experimental analysis of suitability of various semiactive control
methods for magneto-rheological vehicle suspensions. Smart Struct Mat Damp and Isol 2005;5760:208–216.
[62] Sharma K. Active control of vehicle suspension. PhD Dissertation. The University of Leeds 1995.
158
N. H. Amer et al. / EEST Part A: Energy Science and Research
30
(2012)
143-158
[63] Hassan SA. Fundamental studies of passive, active and semi-active automotive suspension system. PhD
Dissertation. The University of Leeds 1986.
[64] Rajamani R. Vehicle dynamics and control. in Mechanical engineering series. Springer, US, 2006.
[65] Gaid MEMB, Ela AC, Kocik RE. Distributed control of a car suspension system. EUROSIM Congr on Modell
and Simul. 2004.
[66] Zhang G, Fang Z, Shu L. GALQR optimal control method and applying in the active suspension system, Int
Conf on Intell Syst Knowl Eng. 2007.
[67] Peng BB, Huang XQ. A simulation test method for a half semi-active vehicle suspension based on the
hierarchical modeling method. IEEE Int Conf Veh Electron and Saf, ICVES, pp. 63–67, 2006.
[68] Mayne DQ, Rawlings JB, Rao CV, Scokaert POM. Constrained model predictive control: Stability and
optimality. Automatica 2000;36:789–814.
[69] Bemporad A, Morari M. Robust model predictive control: A survey. Robustness in identification and control.
Springer Berlin / Heidelberg 1999;245:207–226.
[70] Yucai Z, Huimin Z. An object linking and embedding process control-based interconnection method for
distributed control system and simulation system in power station. Energ Educ Sci Tech-A 2011;28:55–62.
[71] Batterbee D, Sims N. Hardware-in-the-loop simulation of magnetorheological dampers for vehicle suspension
systems. Proc IMechE, Part I J Syst and Control Eng 2007;221:265–278.
[72] Anh-Lam D, Sename O, Dugard L. An LPV control approach for semi-active suspension control with actuator
constraints. Am Control Conf (ACC), pp. 4653–4658, 2010.
[73] Zin A, Sename O, Dugard L. A feedback-feedforward suspension control strategy for global chassis control
through anti-roll distribution. Int J Veh Auton Syst 2009;7:201-220.
[74] Chen Y. Skyhook surface sliding mode control on semi-active vehicle suspension system for ride comfort
enhancement Engineering (http://www.SciRP.org/journal/eng/). 2009;1:23–32.
[75] Biglarbegian M, Melek W, Golnaraghi F. Intelligent control of vehicle semi-active suspension systems for
improved ride comfort and road handling. Annu meet of the North Am Fuzzy Inf Process Soc, NAFIPS,
pp. 19–24, 2006.
[76] Demirbas A. Energy issues in energy education. Energ Educ Sci Tech-A 2011;27:209–220.
[77] Zuo Y, Wang Y, Zhang Y, Chen Z. Neural network-based adaptive control for variable-speed variable-pitch
wind energy conversion systems. Energ Educ Sci Tech-A 2011;28:125–132.
[78] Segel L, Xiao-Pei L. Vehicular resistance to motion as influenced by road roughness and highway alignment.
Rep No:HS-035 912, 1982;12:211–222
[79] Fodor MG, Redfield RC. The variable linear transmission for regenerative damping in vehicle suspension
control. Amer Control Conf, pp. 26–30, 1992.
[80] Wang CH, Chen Y, Huang J. Thermal and electrical mechanism of thermoelectric generation chip and its
performances in solar energy thermal power system. Energ Educ Sci Tech-A 2011;28:331–338.
[81] Nakano K, Suda Y, Nakadai S. Self-powered active vibration control using a single electric actuator. J Sound
Vib 2003;260:213–235.
[82] Okada Y, Ozawa K. Energy regenerative and active control of electro-dynamic vibration damper.
IUTAM symp on vib control of nonlinear mech and struct. Springer Netherlands 2005;130:233–242.
[83] Kawamoto Y, Suda Y, Inoue H, Kondo T. Modeling of electromagnetic damper for automobile suspension. J
Syst Des Dyn 2007;1:524–535.
[84] Kawamoto Y, Suda Y, Inoue H, Kondo T. Electro-mechanical suspension system considering energy
consumption and vehicle manoeuvre. Veh Syst Dyn 2008;46:1053–1063.