Lecture IV: LTI models of physical systems
advertisement

Lecture IV: LTI models of physical systems
Maxim Raginsky
BME 171: Signals and Systems
Duke University
September 5, 2008
Maxim Raginsky
Lecture IV: LTI models of physical systems
This lecture
Plan for the lecture:
1
Interconnections of linear systems
2
Differential equation models of LTI systems
3
Review of linear circuit theory
resistors, inductors, capacitors
Kirchhoff’s laws
4
Examples of RLC circuits
5
Leaky integrate-and-fire (LIF) neuron
Maxim Raginsky
Lecture IV: LTI models of physical systems
Interconnections of linear systems
Linearity is preserved when systems are interconnected.
n n
o
o
cascade: S x(t) = S2 S1 x(t)
x(t)
w(t)
S1
y(t)
S2
S
n
o
n
o
n
o
sum: S x(t) = S1 x(t) + S2 x(t)
x(t)
S1
y(t)
S2
S
n
n
o
o
feedback S x(t) = S1 x(t) − S2 y(t)
x(t)
w(t)
+
-
y(t)
S1
S2
S
Maxim Raginsky
Lecture IV: LTI models of physical systems
Cascade
x(t)
S1
w(t)
S2
y(t)
S
Let w(t) be the output of S1 . Then we first use linearity of S1 :
n
o
n
o
n
o
w(t) = S1 a1 x1 (t) + a2 x2 (t) = a1 S1 x1 (t) + a2 S1 x2 (t)
Now use linearity of S2 :
n
n
o
n
o
o
S a1 x1 (t) + a2 x2 (t) = S2 w(t) = S2 a1 S1 x1 (t) + a2 S1 x2 (t)
n n o
o
= a1 S2 S1 x1 (t) + a2 S2 S1 x2 (t)
n
o
n
o
= a1 S x1 (t) + a2 S x2 (t)
This proves that S is linear.
Maxim Raginsky
Lecture IV: LTI models of physical systems
Sum
x(t)
S1
y(t)
S2
S
n
o
S a1 x1 (t) + a2 x2 (t)
n
o
n
o
= S1 a1 x1 (t) + a2 x2 (t) + S2 a1 x1 (t) + a2 x2 (t)
= a1 S1 x1 (t) + a2 S1 x2 (t) + a1 S2 x1 (t) + a2 S2 x2 (t)
|
{z
} |
{z
}
use linearity of S1
use linearity of S2
= a1 S1 x1 (t) + S2 x1 (t) +a2 S1 x2 (t) + S2 x2 (t)
{z
}
|
{z
}
|
=S x1 (t)
=S x2 (t)
= a1 S x1 (t) + a2 S x2 (t)
This proves that S is linear.
Maxim Raginsky
Lecture IV: LTI models of physical systems
Feedback
x(t)
w(t)
+
-
y(t)
S1
S2
S
Let w(t) = x(t) − S2 y(t) . Now, y(t) = S1 w(t) , so
n
o
n o
= x(t) − S w(t) ,
w(t) = x(t) − S2 S1 w(t)
where S is the cascade of S1 and S2 , which is linear if both S1 and S2
are. The system S3 with input x(t) and output w(t), defined by
n
o
w(t) = x(t) − S w(t) ,
is linear. Thus,
n n
o
o
y(t) = S1 w(t) = S1 S3 x(t)
is a cascade of S3 and S1 , and so is linear.
Maxim Raginsky
Lecture IV: LTI models of physical systems
LTI systems via differential equations
A lot of continuous-time LTI systems are described by linear differential
equations with constant coefficients:
M
X
m=0
am
N
dm y(t) X dn x(t)
=
bn
dtm
dtn
n=0
N
where the coefficients {am }M
m=1 and {bn }N =1 are independent of t.
Examples:
linear electric circuits (RLC)
mechanical systems (mass-spring-damper)
We will focus on electrical circuits.
Maxim Raginsky
Lecture IV: LTI models of physical systems
Review: linear circuit elements
Resistor:
Inductor:
Capacitor:
i(t)
i(t)
i(t)
+
+
R
L
+
v(t)
v(t)
v(t)
-
-
-
v(t) = Ri(t)
i(t) =
v(t)
R
v(t) = L
i(t) =
1
L
Maxim Raginsky
Z
di(t)
dt
i(t) = C
t
v(τ )dτ
−∞
C
v(t) =
1
C
Z
dv(t)
dt
t
−∞
Lecture IV: LTI models of physical systems
i(τ )dτ
Review: Kirchhoff’s laws
Kirchhoff’s voltage law (KVL):
+
v1
v2
Kirchhoff’s current law (KCL):
_
i3
+
+
_
_
v3
The sum of voltages in a loop is
equal to zero:
−v1 + v2 + v3 = 0
Maxim Raginsky
i4
i2
i1
The sum of currents entering a node
is equal to zero:
i1 + i2 + i3 + i4 = 0
Lecture IV: LTI models of physical systems
Example: Series RLC circuit
R
i(t)
+
x(t)
L
+
C
_
_
y(t)
Input: voltage source x(t)
Output: voltage across the capacitor y(t)
Apply KVL:
−x(t) + Ri(t) + L
di(t)
+ y(t) = 0
dt
Substitute i(t) = C dy(t)
dt :
−x(t) + RC
dy(t)
d2 y(t)
+ y(t) = 0
+ LC
dt
dt2
Rearrange to get
LC
d2 y(t)
dy(t)
+ RC
+ y(t) = x(t)
2
dt
dt
Maxim Raginsky
Lecture IV: LTI models of physical systems
Example: Parallel RC circuit
x(t)
iR(t)
iC(t)
R
C
+
_
y(t)
Input: current source x(t)
Output: voltage across the capacitor y(t)
Apply KCL:
x(t) = iR (t) + iC (t)
Substitute iR (t) =
y(t)
R
and iC (t) = C dy(t)
dt :
x(t) =
y(t)
dy(t)
+C
R
dt
Rearrange to get
C
1
dy(t)
+ y(t) = x(t)
dt
R
Maxim Raginsky
Lecture IV: LTI models of physical systems
Example: biological neurons
Biological neurons are highly nonlinear systems that convert incoming
electrical signals (encoding external stimuli) into spike trains:
x(t)
y(t)
neuron
0
t
0
t
Inputs to the neuron are electrical
signals traveling along the dendrites
to the body (or soma) of the
neuron. The neuron accumulates a
potential (voltage) across its cell
membrane and then fires, i.e., emits
an electric pulse that travels down
the axon.
Maxim Raginsky
Lecture IV: LTI models of physical systems
Leaky integrate-and-fire (LIF) neuron
The leaky integrate-and-fire (LIF) neuron is a simple model that
describes the salient features of biological neurons. The LIF neuron has
two distinct operating regimes:
subthreshold — when the membrane potential of the neuron is
below a certain threshold value Vth , the neuron acts like a parallel
RC circuit. The capacitance is due to charge buildup on both sides
of the bilipid layer that forms the cell membrane; the resistance is
due to the presence of protein channels in the membrane that can
carry K+ , Na+ and Cl− ions in and out of the cell (leakage current)
superthreshold — when the membrane potential crosses Vth , the
neuron “fires” (emits a unit impulse), and then short-circuits for τref
seconds (the time known as the refractory period). After the
refractory period elapses, the neuron returns to the subthreshold
regime.
Maxim Raginsky
Lecture IV: LTI models of physical systems
Circuit model of the subthreshold regime
Let us look at the subthreshold regime of the LIF neuron with a unit step
input x(t) = u(t)
x(t)
iR(t)
iC(t)
R
C
1
dy(t)
+ y(t) = u(t)
dt
R
i
h
y(t) = R 1 − e−t/RC u(t)
C
+
_
y(t)
The overall output of the LIF neuron due to the unit step input looks like
this:
y(t)
Vth
0
τref
Maxim Raginsky
t
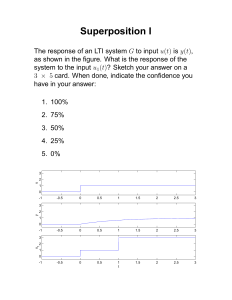
Lecture IV: LTI models of physical systems