Over-Voltage Analysis using Multi-Conductor Transmission

Over-Voltage Analysis using Multi-Conductor Transmission Line with Distributed Parameter Representation
Thiago F. L. Milagres Patrick M. Santos Fernando M. M. Panad´es Alessandro F. Moreira
Universidade Federal de Minas Gerais
Departamento de Eng. El´etrica
Av. Antˆonio Carlos, 6627, Pampulha
Belo Horizonte, MG, 31270-010 — Brazil
Email: moreira@cpdee.ufmg.br
Abstract— This paper presents the modeling of power cables using multi-conductor transmission line with distributed parameter representation to be employed in the analysis of over-voltage phenomena in PWM long cable drives. Distributed-parameter representation of the power cable is discussed in the paper and the computation results using this approach is analyzed. The key issues of the cable model are presented. It will be demonstrated, by simulation and experimental results, that better results are achieved using distributed-parameter representation for a 20 meters cable 2 hp drive case. Other analysis including drives with power cables longer than
200 ∼ 250 meters and power cable with non-symmetric configurations are presented, which demonstrate the suitability of the models.
Index Terms— Industrial Drives; Electrical Drive Sys- tems Design and Applications; Over-voltage and dv/dt
Filter Design.
I NTRODUCTION
This paper focus on the representation of the power cable to analyze the over-voltage phenomena in long cable PWM drives. It is known that the most familiar method to represent the power cable is to use lumped-parameter sections. Single or multi-phase lines can be modeled. A simple lumped-parameter section model will give the correct fundamental impedance, but cannot accurately represent other frequencies unless many sections are used. In previous work, an adequate number of segments could be chosen, depending on the cable length and on the voltage pulse rise time, and the results have demonstrated that the computation were able to accurately represent the over-voltage phenomena [1], [2]. However, there exist some drawbacks as following:
•
•
•
Lumped-parameter representation cannot accurately represent the frequency dependent parameters of a line, such as skin effect.
The computational time and the matrix sizes increase as cable length increases.
Lumped-parameter representation is not practical with a large number of mutually coupled conductors.
A second way is to use a distributed transmission line, which is most suited for transient line response modeling. A distributed model operates on the principle of traveling waves.
In a sense, a transmission line or cable is a delay function.
Whatever is fed into one end will appear at the other end, perhaps slightly distorted, after some delay. However, there are some other considerations which must be dealt with which include mutual coupling with other conductors, and waveshape attenuation as it travels along the line. The frequencydependent line model represents the frequency dependence of all parameters. This model is necessary for studies requiring a very detailed representation of the line over a wide frequency range. Frequency dependent models can be solved using modal techniques [3], [4], [5] or using more advanced phase domain techniques [6], [7]. The frequency dependent phase domain model should be used when possible, as it will represent all frequency dependent effects of the cable, including the skin effect (line resistance increases with frequency), and the modal transformation matrices frequency dependent effects.
The phase domain model is numerically robust and more accurate than any other commercially available line/cable model, and should thus be preferred.
The objective of this paper is to demonstrate that the lumped-parameter representation is valid to study the overvoltage phenomena, depending on the cable length and voltage pulse rise time constraint. In addition, to suggest an alternative to study the over-voltage problem, which is more suitable in the case of long cable PWM drives with cable lengths greater than 200 m.
D ISTRIBUTED PARAMETER R EPRESENTATION
OF THE C ABLE
The distributed-parameter representation of the power cable to study the over-voltage phenomena is implemented using the
P SCAD/EM T DC c
, which is most suitable for simulating the electromagnetic transients of electrical systems, but may be also used to study the over-voltage problems in long cable
PWM drives. The T-LINE and CABLE constant processors are used to generate the data required by the EMTDC line models. Only the conductor properties (resistance, radius...) and geometry (horizontal and vertical cable dimensions) are required to model the line. The T-LINE and CABLE constant processors then store the solved line constants data in output files. More details about the PSCAD/EMTDC software can be found in [8] or accessing the site: http : //www.pscad.com
.
The P SCAD/EM T DC c software has the necessary tools to simulate electrical transients in transmission lines and underground cables. However, the software does not have the accurate model for four wire power cables in trays.
There are two alternatives to develop this particular model in
P SCAD/EM T DC c
:
• To use the existing models in the software, providing some changes in the physical and electrical properties;
• To develop a dedicated model that can hold the entire real system criterion. This model could be developed
Over-Voltage Analysis using Multi-Conductor Transmission Line with Distributed Parameter Representation
Eabf
Ebcf
Ecaf
C1 sim-cabo
C2
C3
I_cm C4
1.0e-005 sim-cabo
C1
C2
C3
C4 sim-cabo
Eal
Eab
Ebl
Ebc
Eca
Ecl
5600.0
0.004
1150.0
0.0027
5600.0
0.004
1150.0
0.0027
5600.0
0.004
1150.0
0.0027
3.14e-005
3.14e-005
3.14e-005
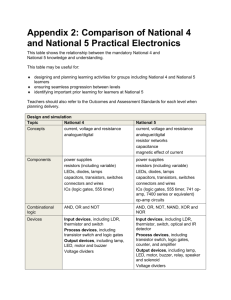
Fig. 1: Schematic of the motor drive system that was simulated in PSCAD / EMTDC c .
from the sub-routine that eventually would be attached at the P SCAD/EM T DC c software.
As a initial approach it will be used the first modeling alternative and the second one, although is more appropriate to represent the real system, will be left for a future work.
Therefore, some changes in the electrical parameters have been done with the actual P SCAD/EM T DC c cable model in order to validate the experimental results. It was verified that the travel time of the voltage pulse is strongly dependent with the wire insulator relative permittivity ( r ). In addition, the motor model is so important, mainly in that if it says respect to the magnitude voltage wave form and travel time. The figure shows the simulation and measurement result for a 20 m cable length case with symmetric configuration. Line-to-line motor terminal voltages are shown.
The following describes the implementation of the 2 hp motor drive system in the P SCAD/EM T DC c to study the over-voltage phenomena at the motor terminals:
•
•
The voltage pulse is modeled as three single-phase voltage pulses so that a voltage transient from Vector 0 to Vector 1 in the VSI operation is obtained. A ramp shape is used to realize the voltage pulse. The DC bus is assumed to have 300 V and the rise time was set to 150 nanoseconds. A stray capacitance (around 50 pF) models the capacitive coupling between the neutral point of the three-phase source and the fourth wire (ground wire).
The power cable is modeled as a four wire cable ( 6
AWG). A symmetric case is presented here. An untransposed case is presented in the final paper. Conductor properties and cable geometry are the following:
– External diameter of the bundle: 2.115 cm;
– Thickness of bundle insulation: 0.205 cm;
– External diameter of each wire: 0.79 cm;
– Thickness of the wire insulation: 0.16 cm;
– Conductor resistivity: 1.72 x 10
− 8 Ω m;
•
– Conductor relativity permeability: 1;
– Wire insulator relativity permittivity: 2.9;
– Wire insulator relativity permeability: 1;
– Ground resistivity: 100
Ω m;
The motor input impedance is modeled using the same lumped-parameter model that was utilized in previous works [2], [9].
Figure 1 presents a schematic of the system that
P SCAD/EM T DC c was simulated using the software, showing the three-phase voltage source, the inverter stray capacitance with respect to the ground wire, the four wire power cable and the high frequency model of the motor input impedance.
S IMULATION R ESULTS
Several simulations were realized and selected results are presented here. Figure 2 shows the simulation results for a 20 m cable length case with symmetric configuration. Line-to-line motor terminal voltages are shown overlaid with the line-toline voltages at the inverter output. One can verify that almost double DC bus peak voltage appears at the motor terminals as it is expected.
The suitability of the distributed-parameter representation is better verified for cases including non-symmetric configuration of the cable, very long cable lengths (above 200 m in the case of low voltage PWM drives), or cases with unbalanced voltages. Figure 3 shows simulation results assuming asymmetric configuration of the power and no transposition. In this case the stray capacitances between the wires is not the same as well as the mutual inductances. In consequence, the line-toline voltages among the phases at the motor terminals have different characteristics.
Figure 4 shows simulation results for 200 m cable length. It can be verified that using distributed-parameter representation more accurate results are obtained in comparison with the results that were obtained with lumped-parameter representation.
Over-Voltage Analysis using Multi-Conductor Transmission Line with Distributed Parameter Representation
Eabf Eab
0.70
0.60
0.50
0.40
0.30
0.20
0.10
0.00
Ebcf Ebc
0.030m
0.020m
0.010m
0.000
-0.010m
-0.020m
-0.030m
Ecaf Eca
0.10
0.00
-0.10
-0.20
-0.30
-0.40
-0.50
-0.60
-0.70
0.000
0.002m 0.004m 0.006m 0.008m 0.010m
Eabf Eab
0.60
0.50
0.40
0.30
0.20
0.10
0.00
-0.10
Ebcf Ebc
0.08m
0.06m
0.04m
0.02m
0.00
-0.02m
-0.04m
-0.06m
-0.08m
Ecaf Eca
0.10
0.00
-0.10
-0.20
-0.30
-0.40
-0.50
-0.60
0.000
0.002m 0.004m 0.006m 0.008m 0.010m
Fig. 2: Simulation results: 2 hp drive, 20 m cable symmetric configuration. Voltage pulse rise time: 150 ns. DC bus voltage:
330 V.
Fig. 4: Simulation results: 2 hp drive, 200 m cable symmetric configuration. Voltage pulse rise time: 150 ns. DC bus voltage:
330 V.
0.20
0.10
0.00
-0.10
-0.20
0.70
0.60
0.50
0.40
0.30
0.20
0.10
0.00
Eabf
Ebcf
Eab
Ebc
0.10
0.00
-0.10
-0.20
-0.30
-0.40
-0.50
-0.60
Ecaf Eca
0.000
0.002m
0.004m
0.006m
0.008m
0.010m
600
400
200
0
0
600
400
200
1
Line−to−line motor terminal voltages − 20 m cable
Experimental Results
2 3 4 5 6 7 8 9 x 10
−6
Simulation Results
0
0 1 2 3 4 5
Time [sec]
6 7 8 9 x 10
−6
Fig. 5: Simulation results: 2 hp drive, 20 m cable symmetric configuration. Voltage pulse rise time: 150 ns. DC bus voltage:
330 V.
Fig. 3: Simulation results: 2 hp drive, 20 m cable asymmetric configuration. Voltage pulse rise time: 150 ns. DC bus voltage:
330 V.
S IMULATION M ODEL V ALIDATION
Experimental analysis was carried in a 2 hp drive system in order to validate the simulation model developed for the power cable. Figure 5 shows the experimental and simulation results for the 2 hp drive system with 20 meters power cable length. One can observe that the simulation results perfectly match to the experimental ones demonstrating the suitability of the P SCAD/EM T DC c model.
Figure 6 shows the comparison between the simulation results obtained using the simulation program developed in a previous work [9], the simulation results obtained using
P SCAD/EM T DC c software and the experimental results obtained in laboratory. It can be verified that both distributedparameter and lumped-parameter representations were able to accurately represent the over-voltage stress at the motor terminals. However, the P SCAD/EM T DC c simulation model is more appropriate than the other one, showing accurate damping and amplitude characteristics comparing to the experimental results.
C ONCLUSIONS
Analysis of the over-voltage phenomena was exploited using a distributed-parameter representation of the power cable using the P SCAD/EM T DC c software. Some changes in the electrical parameters have been done with the actual cable
Over-Voltage Analysis using Multi-Conductor Transmission Line with Distributed Parameter Representation
700
600
500
400
300
200
100
0
−100
−1
300
200
100
0
−100
0
700
600
500
400
Line−to−line motor terminal voltages − 20 m cable
Experimental Results
0
1
1 2
Time [sec]
2
Time [sec]
3
3 4
Simulation results − Motor: 3 hp − Cable: 20 m
5 x 10
−6
4 5 x 10
−6
400
300
200
100
0
700
600
500
Line−to−line motor terminal voltages − 20 m cable
PSCAD Simulation Results
−100
−1 0 1 2
Time [sec]
3 4 5 x 10
−6
Fig. 6: Over-voltage analysis in a 2 hp motor with 20 m cable drive. Line-to-line voltage at the inverter output and in the motor terminals. Upper plot: experimental results; middle plot: simulation results using lumped-parameter representation; lower plot: simulation results using distributedparameter representation. Voltage pulse rise time: 150 ns. DC bus voltage: 330 V.
model in P SCAD/EM T DC the experimental results.
c software in order to agree
It was verified that the distributed-parameter is more suitable to study the over-voltage phenomena for very long cable lengths and for asymmetric systems. The simulation results obtained with the P SCAD/EM T DC have also demonstrate that the M AT LAB c software based program with lumped-parameter representation may be also used to study the over-voltage phenomena, depending on the length characteristics of the power cable and on the voltage pulse rise time duration. A dedicated model for the power cable that includes frequency-dependent phase parameters is under investigation and its results will be published in a future work.
A CKNOWLEDGMENT
This research work has been supported by the following entities: LAI (Laborat´orio de Aplicac¸oes Industriais) at UFMG-
DEE/Brazil and WEG Ind´ustrias S/A - Automac¸˜ao.
R EFERENCES
[1] A. F. Moreira, T. A. Lipo, G. Venkataramanan, and S. Bernet. “Modeling and Evaluation of dv/dt Filters for AC Drives with High Switching
Speed”. In 9th European Conference on Power Electronics and Applica-
tions (EPE’01), Graz, Austria, 2001.
[2] A. F. Moreira, P. M. Santos, T. A. Lipo, and G. Venkataramanan. “Filter
Networks for Long Cable Drives and Their Influence on Motor Voltage
Distribution and Common-Mode Currents”. In 29th Annual Conference
of the IEEE Industrial Electronics Society (IECON’03), Roanoke, VA,
USA, 2003.
[3] J. R. Marti. “Accurate Modeling of Frequency-Dependent Transmission
Lines in Electromagnetic Transient Simulations”. IEEE Transactions on
Power Apparatus and Systems, 101(1):147–157, January 1982.
[4] J. R. Marti.
“Simulation of Transients in Underground Cables with
Frequency-Dependent Modal Transformation Matrices”. IEEE Transac-
tions on Power Delivery, 3(3):1099–1110, July 1988.
[5] A. Abur, O. Ozgun, and F. H. Magnano.
“Accurate Modeling and
Simulation of Transmission Line Transients Using Frequency Dependent
Modal Transformations”.
In IEEE Power Engineering Society Winter
Meeting), volume 2, pages 1443–1448, USA, 2001.
[6] A. Morched, B. Gustavesen, and M. Tartibi. “A Universal Model for
Accurate Calculation of Electromagnetic Transients on Overhead Lines and Underground Cables”.
IEEE Transactions on Power Delivery,
14(3):1032–1038, July 1999.
[7] B. Gustavsen. “Frequency-Dependent Transmission Line Modeling Utilizing Transposed Conditions”. IEEE Transactions on Power Delivery,
17(3):834–839, july 2002.
[8] Manitoba HVDC Research Centre, Winnipeg, Manitoba, Canada.
PSCAD/EMTDC Getting Started: Basics and Installation, 2000.
[9] A. F. Moreira, T. A. Lipo, G. Venkataramanan, and S. Bernet. “High
Frequency Modeling for Cable and Induction Motor: Overvoltage Studies in Long Cable Drives”. IEEE Transactions on Industry Applications,
38(5):1297–1306, Sep./Oct. 2002.