ωt v = r ω
advertisement

Lagrangian Dynamics 2008/09
1. L does not depend explictly on θ (rotational symmetry) hence pθ is conserved. This is
conservation of angular momentum about an axis of symmetry.
Lecture 11: More on the Energy Function, Conservation Laws and Symmetry.
2. L does not depend explicitly on t. Hence
h = pr ṙ + pθ θ̇ − L
The energy function and the total energy
For many (but not all) conservative systems, the kinetic energy is quadratic in the velocities,
so that L = T ({q}, {q̇}, t) − V ({q}, {6 q̇}, t) with
1X
Tij ({q}, {6 q̇}, t) q˙i q˙j
T ({q}, {q̇}, t) =
2 ij
where Tij is a symmetric matrix whose entries can depend on the coordinates {q}, and on
time, but not the velocities. An obvious example is a set of particles in cartesians for which
P
T = 12 i mi ẋ2i which is of the required form (with a diagonal, constant matrix Tij = mi δij ).
For quadratic T it follows that the momentum pi conjugate to the coordinate qi is
X
∂T
pi =
=
Tij q̇j
∂ q̇i
j
⇒
h =
X
i
so that h = E
pi q̇i − L =
X
is conserved. Since T is quadratic in the velocities, this coincides with conservation of
the total energy E = 12 m(ṙ 2 + r 2 θ̇2 ) + V (r).
Particle on a Rod in Forced Motion:
The same system is now forced to rotate at
fixed angular velocity θ̇ = ω. Find a constant of the motion.
We now have a time-dependent constraint. There is only one dof left, namely r. We can
still write
1
L = T − V = m(ṙ 2 + r 2 θ̇2 ) − V (r)
2
except that the angle θ is no longer a dof, ie no longer one of the q’s. It obeys the holonomic
constraint θ = ωt + constant. To emphasise this it is much better to write
1
L(r, ṙ, t) = m(ṙ 2 + r 2 ω 2 ) − V (r)
2
Tij q̇i q̇j − T + V = 2T − T + V = T + V
ij
where ω is more obviously constant. Note that T is no longer quadratic in the velocities –
the second term in T is not dependent on any generalised velocity.
where we define E as the total energy E ≡ T + V as usual.
For these systems, time-translational symmetry of L results in conservation of the total
energy E. However, not all systems have T of the required form: in particular this will
not happen if there are time-dependent constraints (example below). Hence in the general
case, it is the energy function h, rather than the total energy E which is conserved as a
consequence of time-translational symmetry in L. The distinction is important!
The canonical momentum is
Distinguishing between E and h – via two examples
so that pr is not conserved (even when the potential V = 0.) The first term is easily identified
as the centrifugal force due to the forced rotation.
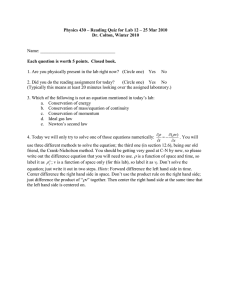
(1) Particle on a rod
A particle slides on a massless rod which is pivoted
at one end and constrained to rotate in a plane. The
potential V (r) has rotational symmetry about the pivot.
Find two constants of the motion.
This is really just a particle in (cylindrical) polars. We
have two degrees of freedom, r & θ. The Lagrangian is
1
L = T − V = m(ṙ 2 + r 2 θ̇2 ) − V (r)
2
.
vθ = r θ
m
r
θ
The generalised momenta which are canonically conjugate to r and θ are
∂L
pr =
= mṙ
= radial component of linear momentum
∂ ṙ
∂L
pθ =
= mr 2 θ̇ = angular momentum about the rotation axis
∂ θ̇
What are the conservation laws for this case?
1
.
vr = r
pr =
∂L
= mṙ
∂ ṙ
as usual. However, we note that
∂L
∂V
= mrω 2 −
∂r
∂r
On the other hand, L still has no explicit t dependence, ∂L/∂t = 0. (This is because the
forced rotation rate ω is constant in time.) Thus the energy function
1
h = pr ṙ − L = m(ṙ 2 − r 2 ω 2) + V (r)
2
is a constant of the motion. Evidently h is not the total energy
1
E = T + V = m(ṙ 2 + r 2 ω 2 ) + V (r)
2
Indeed, since r is not a constant, E is not a conserved quantity.
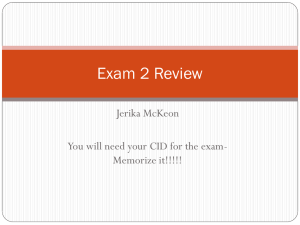
Discussion: To understand why E is not conserved,
consider the constraint force F constr (say) which keeps the
bead on the rod.
The tangential acceleration is (in cylindrical polars)
aθ = r θ̈+2ṙ θ̇ ⇒ F constr = maθ = 2mṙω (since θ̈ = ω̇ = 0)
2
vθ = r ω
F constr
ωt
This constraint force acts perpendicular to the wire, in the direction of the velocity vθ = rω.
Hence the constraint force does work on the bead at a rate
d
F constr vθ = 2mω 2 r ṙ = (mr 2 ω 2)
dt
This is just
dE
d
(E − h) =
dt
dt
(since h is conserved) which precisely accounts for the change in E.
Technical Query: But didn’t we say earlier in Lecture 4 that constraint forces do no
work? Not quite, we said that they do no work in any virtual displacement consistent with
the constraints. The only virtual (that is, instantaneous) displacement possible in this system
is for the bead to move along r, which is perpendicular to F constr and hence no work is done.
This does not rule out constraint forces doing work in a non-instantaneous change, including
the actual motion, as the above example shows.
Isotropy of space: We now demand that space is isotropic: ie, that L is invariant
under rotations of the entire system of N particles about an arbitrary axis. For a rotation
b through a small angle Φ about an axis Φ,
b we have
Φ ≡ ΦΦ
∆r a = Φ × r a
∆ṙ a = Φ × ṙ a
which are the usual transformation laws for vectors under infinitesimal rotation. Now
∆L =
a
a
then L is invariant. This is symmetry under translations of the entire system – a bit different
from varying one coordinate on its own. If so, we must have (using Taylor’s theorem to
expand ∆L):
!
∆L =
X
a
∇ (r ) L · ∆r a =
a
X
a
∇ (r ) L · ǫ = 0
a
where ∇ (r ) L is the gradient of L wrt r a , ie its components are (∂L/∂xa , ∂L/∂ya , ∂L/∂za )
a
and the dot product is the usual three-dimensional one. Since ǫ is arbitrary, we have
X
a
∇ (r ) L
a
X dp
dP
a
=
=0
dt
dt
This is the conservation of P , the total momentum of our system of particles.
Homogeneity of space ⇒ Conservation of total momentum
3
∇ (ṙ ) L · ∆ṙ a = 0
a
a
X d dt
X
∇ (ṙ ) L · (Φ × r a ) +
a
a
∇ (ṙ ) L · (Φ × ṙ a ) = 0
a
Using the result that A · (B × C) = (C × A) · B we get
"
X
a
ra ×
or
d
∇ (ṙ ) L
a
dt
"
X
+
a
ṙ a × ∇ (ṙ ) L
!#
d X
r a × ∇ (ṙ ) L
a
dt a
a
#
·Φ = 0
·Φ = 0
This holds for any small rotation Φ, hence the term in square brackets vanishes identically.
Hence
X
X
=
r a × p a ≡ L = constant
r a × ∇ (ṙ ) L
a
a
a
Isotropy of space ⇒ Conservation of total angular momentum
The above proofs make no use of Newton’s third law in either form! The third law is thereby
exposed as a red herring.
Symmetries and Conservation Laws: Summary
= 0
Writing Lagrange’s equations in the form
dp a
= ∇ (r ) L ,
a
dt
summing over all particles a, and using equation (1) we obtain the result
a
a
X
Substituting for ∇ (r ) L via Lagrange’s equations, and for ∆r a & ∆ṙ a , we obtain
a
a
Homogeneity of Space: We demand that space is homogeneous, ie it’s the same ‘everywhere’. If all particles are subjected to the same small displacement (keeping the velocities
ṙ a fixed):
ra → ra + ǫ
∇ (r ) L · ∆r a +
where ∇ (ṙ ) L has components (∂L/∂ ẋa , ∂L/∂ ẏa , ∂L/∂ ża ).
More on Symmetries and Conservation Laws
We now go back to first principles. Consider an isolated system of N particles in cartesians
r a = (xa , ya , za ), where a = 1, · · · , N. (This explicit notation is more suited to our current purposes than the {x} notation.) We now prove the conservation of the total linear
momentum and total angular momentum for this system.
X
(1)
L invariant under:
qj → qj + λ
Conserved Quantity
pj
t→t+λ
h=
Global Translations
P
Global Rotations
L
Poincaré Transformations
Energy-momentum Tensor
Gauge Transformations
Electric charge
P
j
pj q̇j − L
In the last two examples we have strayed rather beyond the course boundaries. . .
4