c•
ELSEVIER
JOURNAL OF
COMPUTATIONAL AND
APPLIED MATHEMATICS
Journal of Computational and Applied Mathematics 66 (1996) 279 291
Super-critical free-surface flow over a trapezoidal obstacle
S.N. Hanna, M.N. Abdel-Malek, M.B. Abd-el-Malek*
Department of Engineering Mathematics and Physics, Faculty of Engineering, Alexandria University, Alexandria 21544,
Egypt
Received 9 June 1994; revised 31 May 1995
Abstract
A numerical method based on series truncation is presented to solve the problem of an irrotational, inviscid,
incompressible and steady flow over a two-dimensional trapezoidal obstacle, with obstacle height W, lying on the
bottom of the running stream. The suggested numerical method for the solution of the fully nonlinear problem is
presented for which the flow is super-critical both upstream and downstream. It is found that solutions exist for
symmetric trapezoidal for arbitrary size. The results are plotted for different trapezoidal shapes and different values of
Froude number F > 1. The effect of the Froude number, the bottom height and the shape of the bottom are discussed.
Keywords." Inviscid flow; Schwartz Christoffel transformation; Series truncation method
AMS classification: 76; 76B
1. Introduction
The effect of the shape of the bottom on surface waves has received considerable attention during
the past 40 years. We may mention in particular the work of Kreisl [17], Benjamin [,4], Newman
[20], Madsen and Mei [-19], Johnson [13], Hamilton [11], Forbes [8], Forbes and Schwartz [-10],
Smith and Lim [23], Boutros et al. [6], Abd-el-Malek and Hanna [-1], King and Bloor [,15], and
Abd-el-Malek et al. [2].
For subcritical flow, there have been the papers of Salvensen and Von Kereczek [,21,22],
Korving and Hermans [-16], and Dias and Vanden-Broeck [7].
For critical flow, there have been the papers of Forbes [-9] and Hanna [12].
In this paper we consider super-critical flow over a submerged trapezoidal obstacle. A series
truncation procedure is employed to calculate the flow past the submerged obstacle. This technique
has been used successfully by Birkhoff and Zarantonello [,5], Vanden-Broeck and Keller [,24], Dias
and Vanden-Broeck [7] and Hanna [,12] to calculate nonlinear free-surface flow.
* Corresponding author. E-mail: mina@alex.eun.eg.
0377-0427/96/$15.00 © 1996 Elsevier Science B.V. All rights reserved
SSDI 0 3 7 7 - 0 4 2 7 ( 9 5 ) 0 0 1 6 0 - 3
280
S.N. Hanna et al./Journal of Computational and Applied Mathematics 66 (1996) 279-291
The type of solutions for which the flow is super-critical both upstream and downstream is
referred to as "super-critical flow".
In this paper we solve nonlinear super-critical flow of ideal fluid over a polygonal obstacle
numerically by specifying uniform flow upstream and downstream of the obstacle. In Section 2, we
formulate the problem. Solutions for polygonal obstacle are presented in Section 3. For the special
case of trapezoidal obstacles, solutions and results are presented and discussed in Section 4.
2. Formulation of the problem
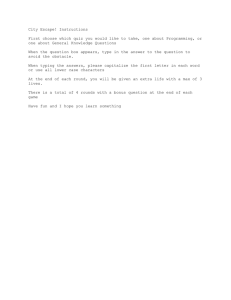
We consider steady flow in a channel of constant width, uniform and of the same depth at infinity
in both directions over a bottom composed of symmetric polygon of 2N corners and (2N - 1)
straight-line segments, as shown in Fig. 1. The motion is assumed to be two-dimensional,
incompressible, irrotational and inviscid, the depth and velocity at infinity being H and U,
respectively.
A cartesian coordinate system is defined with origin placed horizontally at a point between - N,
and N, the x-axis coincides with the stream bed before and after the obstacle and the y-axis
pointing vertically upwards. Fluid flows through the channel in positive x-direction, with speed
U and depth H far upstream. Relative to the coordinate axis the flow is steady and is subject to the
acceleration of the gravity 9 in the negative y-direction.
Since the flow is irrotational and the fluid is incompressible, we can define the complex potential
Z = ~ + i ~ in terms of the potential function q~ and the stream function 7s. Since q~ and ~ are
conjugate solutions of Laplace's equation, Z(z) is an analytic function of z within the region of flow,
with complex conjugate velocity
dz
u ( x , y ) - i v ( x , y ) = q e -i°,
¢ ---- d--~ --
(2.1)
"%2
\N-I'
,
[I
-N
~N ~
N
I
[
×
Fig. 1. Physical plane of the flow and of the coordinates and the general symmetricobstacle, z-plane.
S.N. Hanna et al. /Journal of Computational and Applied Mathematics 66 H996) 279-291
281
where u and v are the horizontal and vertical components, of the fluid velocity, respectively, and
may be expressed as
u -
Ox
-
v -
@'
c~y
-
(2.2)
Ox"
The dynamic b o u n d a r y condition on the free surfaces 7 / = 0 and ~u = Q = UH is
1[ i7ck[2 + gy = constant on the free surface.
(2.3)
We introduce the dimensionless variables by taking (QZ/g)l/3 as the unit length and (Qg) 1/3 as the
unit velocity. The dimensionless discharge is now equal to one. Hence, the free surface is
a streamline on which ~u = 1. In terms of the dimensionless variables, the condition (2.3) becomes
IVY[ 2 + 2y = constant on ~O= 1.
(2.4)
The complex potential g maps the flow domain conformally onto an infinite strip of height unity
as shown in Fig. 2.
In dimensionless form, after dropping the primes, (2.1) becomes
dz _ qe_iO"
(2.5)
- dz
Let
o9 = In ~ = In q - i0,
(2.6)
where ~ is called the logarithmic hodograph variable.
Then, from (2.5) and (2.6) we get
z
=
re-
~
dz.
(2.7)
Using the Schwartz-Christoffel transformation, we map this infinite strip onto the upper-half of the
unit disk with I1 and I2 correspond to the points - 1 and 1, respectively, as shown in Fig. 3, so that
I1
I
]1
:)
i
-N-N.1
J
-m
i
-2-1
l
I2
~=1
i
I
0 1 2
I
m
[
I
t>C~
N-I N I2
Fig. 2. The normalized complex potential plane, x-plane.
282
S.N. Hanna et al./Journal o f Computational and Applied Mathematics 66 (1996) 279-291
lJ
_
=
-
:.
z
•
-1 _tN_tN_l_tm_t2 _tl
il
t2
2
im
iN-liN~
Fig. 3. The upper half circle-plane, t-plane.
the solid b o u n d a r y goes o n t o the real diameter and the free surface o n t o the u p p e r half-unit circle.
The images of the points { - N, - ( N - 1), . . . , - 2, - 1, 1,2, . . . , N - 1, N} are { - tN, - tN- 1, .-.,
-- t2, -- t l , t l , t2 . . . . . tu- 1, tN}, respectively. The m a p p i n g is given by
2
l+t
Z=-nln--l_t,
Itl~<l.
(2.8)
O u r goal is to find ~ as an analytic function satisfying the b o u n d a r y condition
1412 "1- 2y = c o n s t a n t on It] = 1
(2.9)
and the b o u n d a r y condition on the real d i a m e t e r It[ ~< 1.
3. Solution
The first step is to r e m o v e from the c o m p l e x velocity ~ the strong singularities which occur at the
angled corners of the polygon. T h e y are of the following forms:
.,~(t + tg) 1-(~,/~,
t--* T-ti; i = - - N , . . . , --1,1 . . . . ,N,
where the angles ~i, i = - N ,
(3.1)
- ( N - 1), . . . , - l , 1, . . . , N - 1, N satisfy the relation
N
}-', c~i = Nrt.
(3.2)
i=1
As 4~ --+ + 0% the flow a p p r o a c h e s a uniform super-critical stream. Therefore, the a s y m p t o t i c
form of ( as 4~ ---, + ~ is o b t a i n e d by linearizing the e q u a t i o n s a r o u n d a uniform stream. F o l l o w i n g
L a m b [18] and A b d - e l - M a l e k and M a s o u d [3] we get
"-~ 4(1) + Ee-Xz
as q5 --+ + c~,
where E is a real constant and 2 is the smallest positive r o o t of the e q u a t i o n
F22 - tan 2 = 0
(3.3)
S.N. Hanna et al./Journal of Computational and Applied Mathematics 66 (1996) 279-291
283
and F is the F r o u d e n u m b e r defined by
U
F - - -
(3.4)
,/gR
We define the function f2(t) by the relation
s
=
I]
j=-N,j¢
Ft_l_tj]l-(~,/~)
ttjj
era°'
oL 1 -+
(3.5)
where the + sign is for j ~ - 1 and the - sign is for j / > 1.
The function f2(t), see [5], is analytic for ]tl < 1 and continuous for It[ ~< 1. The b o u n d a r y
condition (2.9) imply that the expansion of f2(t) in powers of t, on t e [ - 1, 1], has real coefficients.
Therefore, f2(t) can be written in the following expansion:
3(5
(2(t) = A(1 -- t2) 2~/~ + ~
a,t 2",
(3.6)
n=O
where 2 is determined from (3.3), and the u n k n o w n real coefficients a, and A, in (3.6) satisfy the
dynamic free-surface condition (2.9). Since the flow is symmetric with respect to the y-axis, only
even powers of t are used in (3.6).
By using the notation t = [t[ e i~, s o that points on the free surface are given by t = e i~ (0 < O" < g).
Using (2.8) and the identity
c3x
. ~3y
1
~--~ -'[-1C3--~ = ~,
(3.7)
we obtain after some algebraic manipulations,
dy
da
2
/)
1
n/,/2 _~_ /)2 sin (7
(3.8)
Differentiating (2.9) with respect to o- and using (3.8) we obtain
d [u2(o. ) + v2(a)]
da
4
v(cr)
1
- 0.
(3.9)
n b/2(o ") -~-/)2(0-) s i n a
U p o n substituting t = e i~ in (3.5) and (3.6) to get ~(a) and substitute that expression in (3.9), the
resulting equation will be used to determine the coefficients a,.
We solve for the ak'S numerically by truncating the infinite series in (3.6) after n terms, where
(3.1o)
284
S.N. Hanna et al./Journal of Computational and Applied Mathematics 66 (1996) 2 79-291
We fix the geometry of the polygon by specifying {~j}JV=x, and
(i) for N even: t l , t 3 , . . . , t s - 2 , t u - l , tN,
(ii) for N odd: tl, t 3. . . . , t N - 2 , tN.
The K unknowns tz, t4,t6, ...,tN, A, ao, az, ... , a , are determined by collocation. To do so we
truncate the infinite series in (3.6) after (K - 1) terms and we introduce the (K - 1) mesh points on
the free surface tM = e ti'M), where
O'M = K---'~--1 M -
,
M = 1,2,4, ..., (K - 1).
(3.11)
These points are equally spaced on the upper half of the unit circle. By using (3.9) we obtain the
values of u and v at the points rri in terms of the coefficients a,. This leads to (K - 1) nonlinear
algebraic equations for K unknowns. The last equation is obtained by relating F to the dimensionless velocity downstream 4(1)
F 2 = 14(1)13,
(3.12)
4. Case of trapezoidal obstacle
Fig. 4 shows a cross section of a symmetric trapezoidal obstacle consisting of a raising
up inclined plane ( - 2 to - 1) at inclination angle ~', horizontal plane ( - 1 to 1) with length L
and height W from the b o t t o m of the obstacle, steeping d o w n plane (1 to 2) at inclination angle
-
We introduce the cartesian coordinates with x-axis along the b o t t o m and y-axis going through
the middle of the horizontal plane ( - 1 to 1).
In this case N = 2, then ~z = cc_2 = rt - ~'; col = ~-a = n + ~'.
By specifying values for t~ and t2, we fix the geometry of the trapezoidal.
Y
I1
.
--
/
-2
I
\
- - - T .H
2
iz
Fig. 4. Physical plane of the flow and of the coordinates and the symmetric trapezoidal obstacle.
S.N. Hanna et al./Journal of Computational and Applied Mathematics 66 (1996) 279-291
285
H e n c e (3.5) takes the form
(t+t2~a(t
~(t)=~,l--~2/
+ t l " ~ -~
\1--~1/
(;--
tl"~ -~
--t2"~ ~
~-l/
(;
tt2/ e°""
(4.1,
where ~ = ~'/rt, a n d
f2(t) = A(1 -
t2) 2z/~ + ~, ajt 2j.
(4.2)
j=0
W e set t = e i• in (4.1) a n d (4.2) we get
(4.3)
4(6) = e iO+AL" + s',
where
0 = (0_z + 02 - 0_1 - 01)~ + ALl + $2,
Ll = [2 sin a] a sin 2(0 -- ½r0,
LR = [2 sin a] x cos 2(a -- ½re),
0j = t a n -
l
sina(1 -- t})
c o s a ( 1 + t~) - 2tg'
Sl = ~ ajcos2ja,
j=O
$2 = ~ ajsin2ja
j=l
and substitute ~ in (3.9) we get
Y(a)=[~[3
[ (L,
A2 i~-na
---L,
) - $ 3 1 + 2 s-i-n-00 ,
rt sin a
(4.4)
where
S3 =
~ 2jaj sin 2ja.
j=l
T h e K equations, to d e t e r m i n e the K u n k n o w n s A, aj (j = 0 . . . . . n) where n is given by n = K - 2,
from (3.12) a n d (4.4) are then
F 2 = [~(1)13,
Y(aM) = 0, M = 1,2, ... ,(K - 1).
(4.5)
This system of K nonlinear e q u a t i o n s with K u n k n o w n s are solved by N e w t o n ' s m e t h o d .
Inverting (2.5) yields dz/d Z = 1/~ and thus
dz
1 d•
dt
~ dr"
(4.6)
286
S.N. Hanna et aL /Journal of Computational and Applied Mathematics 66 (1996) 279-291
Once we solve the system of Eqs. (4.5) we calculate the height W of the obstacle by using numerical
integration, along the real axis, of (4.6). This leads to
W = sin ~
dt.
, \dt}
(4.7)
In order to calculate the profile we first calculate the m a x i m u m elevation Ymaxof the fluid above the
obstacle. To do so we integrate (4.6) along the imaginary axis in t-plane between t = 0 to t = i,
Ymax = W +
()
fl --~
dz ~1 dt.
(4.8)
N o w by integrating (4.6) along the unit circle, we obtain
x + iy = iymax -- --2f ' _ _ 1
ds,
rc /2 ~(s)sins
0 < a < re.
(4.9)
5. Numerical results and discussion
The two-dimensional flow of an ideal fluid over trapezoidal obstacle has been investigated.
A numerical m e t h o d based on series truncation is presented to solve the problem for the
super-critical case. The system of K nonlinear algebraic equations with K unknowns is solved by
Newton's m e t h o d for given values of F. The coefficients a, were found to decrease rapidly. For
example for the case W = 0.2, ~' = 60 ° and F = 2.0, 5.0 we have the results in Table 1, for la, I.
Most of the calculations were performed with K = 25, and the nonlinear equations are solved
with relative error of order 10-7. We noticed that by increasing the value of F we need less terms
from the infinite series due to the rapid convergence. Therefore, the series truncation m e t h o d that
we used was found to be appropriate to handle cases where the flow is super-critical.
Table 1
V a l u e s o f l a , I for t h e c a s e W = 0,2, ~' = 60 ° for d i f f e r e n t F r o u d e
numbers
n
F=2
F=5
1
2.219252 x 10 - 1
2.602187 × 10 -1
2
4.88 8587 × 10 - 3
9.917998 × 10 - 4
3
7.478643 X 10 - 4
1.479152 × 10 - 4
4
2.101109 × 10 - 4
3.675565 × 10 - 5
5
10
9.361663 X 10 - s
1.157591 × 10 5
1.366771 × 10 - s
1 . 3 0 2 6 8 0 × 10 - 6
15
2.086489 × 10 - 6
1.827671 X 10 - 7
20
2.471283 x 1 0 - 7
2.845382 x 10 - 9
S.N. Hanna et al./Journal of Computational and Applied Mathematics 66 (1996) 279-291
0.60
'
I
'
I
'
I
q
'
I
'
287
I
F:1.39
0.40
0.20
(a)
-
I
0.00
-6
-4
-2
0
2
4
6
X
0.4
0.3
(hi O. 2
I
2
I
3
I
4
f
5
t~ F
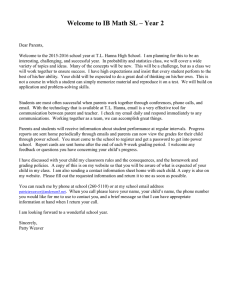
Fig. 5. (a) Effect o f the F r o u d e n u m b e r F for fixed W = 0.2, L = 1, a n d ~' = 60°; (b) ~/m~xversus F for W = 0.2, L = 1.0,
a n d ~' = 60 °.
288
S.N. Hanna et al./Journal of Computational and Applied Mathematics 66 (1996) 279-291
In our study, we focused on the study of the effect of F r o u d e n u m b e r F, the obstacle height W,
the obstacle upper width L and the inclination angle ~ (=~'/~t) on the shape of the free-surface
profile. Also a quantity of physical interest is the m a x i m u m elevation Ymax= y(½r0 on the free
surface at x = 0. It can be represented by the dimensionless parameter ~/max= ( Y m a x / n ) - 1,
I
1]
°
I
'
I
'
I
'
I
'
0.60
0.40
0.20
(a)
o.oo
-6
-4
-2
0
2
4
X
"qrnox
(b)
0.5
1.0
13
*-W
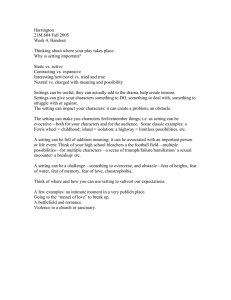
Fig. 6. (a) Effect o f t h e o b s t a c l e h e i g h t W for fixed F = 2.0, a n d L = 1.0 a n d ct' = 60°; (b) ~/max versus W for F = 2.0,
L = 1.0, a n d ct' = 60 °.
S.N. Hanna et aL/Journal of Computational and Applied Mathematics 66 (1996) 279-291
289
where qmax represents the m a x i m u m deviation of the free surface from its level far up- and
down-stream.
(i) Effect of the Froude number F:
The c o m p u t e d free-surface elevation ~/is displayed in Fig. 5(a) for different values of F varying
from 1.39 to 5 and for W = 0.2 and ~' = 60 °.
It is found that the elevation of the free-surface falls d o w n by the increase of the F r o u d e number.
The m a x i m u m elevation, qmax, against F is plotted in Fig. 5(b) which indicates that the qmax decreases monotonically by the increase of F. The m i n i m u m value of /~max is about 0.23 which
corresponds to F ~> 5.
(ii) Effect of the obstacle height W:
The c o m p u t e d free-surface elevation r/is displayed in Fig. 6(a) for different values of W varying
from 0.05 to 0.423, and for F = 2.0 and ~' = 60 °. It is found that the elevation of the free surface
increases by the increase of the obstacle height. In Fig. 6(b) we present/~max versus W. It shows that
the relation is almost linear for W > 0.5.
(iii) Effect of the obstacle upper width, L:
The c o m p o u n d free-surface elevation is displayed in Fig. 7 when L varies from 0.5 to 3.0 while
F = 2.0. It is clear that the free-surface profile becomes more fiat by the increase of L.
(iv) Effect of inclination angle ct':
In Fig. 8(a) we plotted the free-surface elevation when ~' varies from 0.123n to 0.473n. It is clear
that the m i n i m u m profile of the free surface, corresponding to ~' = 0.26n, is about 0.253 as is shown
in Fig. 8(b).
q
i
I
i
I
~
I
'
I
i
I
'
4
X
0.40
0.20
0.00
-6
-4
-2
0
2
Fig, 7. Effect of L for fixed W = 0.2, F = 2.0, and ct' = 60°.
6
S.N. Hanna et al./Journal of Computational and Applied Mathematics 66 (1996) 279-291
290
'
q
I
'
I
0.20
(a)
'
~
'
///
' ~
,
0.00
-6.0
I
\ \\
,
I
-zoo
-4oo
I
I
I
ot--0.473
I
ooo
'
,~--~"~J
4.oo
200
I
X
6.00
Imcix
0.3C
0.28
0.2E
I
(b)
•1
,2
I
.3
I
.4
I
.5
Fig. 8. (a) Effect o f ~ for fixed W = 0.2, F = 2.0, a n d L = 1.0; (b) ~max versus e for F = 2.0, W = 0.2, a n d L = 1.0.
Acknowledgements
One of the authors, namely Dr. Mina B. Abd-el-Malek, would like to express his gratitude to
Prof. Dr. A.C. Smith, Professor of Applied Mathematics, University of Windsor, Ontario, Canada,
for suggesting the free-surface problems over obstacles, while supervising the author's doctoral study.
References
[1] M.B. A b d - e l - M a l e k a n d S.N. H a n n a , A p p r o x i m a t e s o l u t i o n o f a flow o v e r a r a m p for large F r o u d e n u m b e r , J.
Comput. Appl. Math. 28 (1989) 105-117.
S.N. Hanna et al./Journal of Computational and Applied Mathematics 66 (1996) 279-291
291
[2] M.B. Abd-el-Malek, S.N. Hanna and M.T. Kamel, Approximate solution of gravity flow from a uniform channel
over triangular bottom for large Froude number, Appl. Math. Modelling 15 (1991) 25-32.
[3] M.B. Abd-el-Malek and S.Z. Masoud, Linearized solution of a flow over a ramp, Appl. Math. Modelling 12 (1988)
406-410.
[4] T.B. Benjamin, On the flow in channels when rigid obstacles are placed in the stream, J. Fluid Mech. 1 (1956)
227-248.
[5] G. Birkhoff and E.H. Zarantonello, Jets, Wakes and Cavities (Academic Press, New York, 1957).
[6] Y.Z. Boutros, M.B. Abd-el-Malek and S.Z. Masoud, Hilbert's method for numerical solution of flow from
a uniform channel over irregular bottom topographies, Comput. Math. Appl. Mech. Engrg. 65 (1987) 215-228.
[7] F. Dias and J.M. Vanden-Broeck, Open channel flow with submerged obstruction, J. Fluid Mech. 206 (1989)
155-170.
[8] L.K. Forbes, On the wave resistance of a submerged semi-elliptical body, J. Eng. Math. 15 (1981) 287-298.
[9] L.K. Forbes, Critical free-surface flow over a semi-circular obstruction, J. En 9. Math. 22 (1988) 3-13.
[10] L.K. Forbes and L.M. Schwartz, Free-surface flow over a semi-circular obstruction, J. Fluid Mech. 114 (1982)
299-314.
[11] J. Hamilton, Differential equations for long-period gravity waves on a fluid of rapidly carrying depth, J. Fluid
Mech. 83 (1977) 289-310.
[12] S.N. Hanna, Critical free-surface flow over polygonal obstacle, Alex. Eng. J. 33 (1994) 27-36.
[13] R.S. Johnson, On the development of a solitary wave moving over an uneven bottom, Proc. Camb. Phil. Soc. 73
(1973) 183-203.
[14] C.H. Von Kerczek and N. Salvesen, Numerical solutions of two-dimensional nonlinear wave problems, O.N.R. lOth
Symposium on Naval Hydrodynamics, MIT, Cambridge, MA (1974) 649-666.
[15] A.C. King and M.I.G. Bloor, Free-surface flow over a step, J. Fluid. Mech. 184 (1987) 193-208.
[16] C. Korving and A.J. Hermans, The wave resistance for flow problems with a free-surface, 2nd Int. Conf. Numerical
Ship Hydrodynamics (1977) 285-291.
[17] G. Kreisl, Surface waves, Q. Appl. Math. 7 (1949) 21-24.
[18] H. Lamb, Hydrodynamics (Dover, New York, 6th ed., 1945).
[19] O.S. Madison and C.C. Mei, The transformation of a solitary wave over an uneven bottom, J. Fluid Mech. 39 (1969)
781-791.
[20] J.N. Newman, Propagation of water waves past long two-dimensional obstacles, J. Fluid Mech. 23 (1965) 23-29.
[21] N. Salvesen and C.H. Von Kerczek, Numerical solutions of two-dimensional nonlinear body-wave problems, 1st
lnternat Conf. Numerical Ship Hydrodynamics, Gaithersburg, MD (1975) 279-293.
[22] N. Salvesen and C.H. Von Kerczek, Comparison of numerical and perturbation solutions of two dimensional
nonlinear water-wave problems, J. Ship. Res. 20 (1976) 160-170.
[23] A.C. Smith and T.H. Lim, Symmetric supercritical free-surface flow over a polygonal obstacle, Int. J. Eng. Sci. 23
(1985) 289-306.
[24] J.M. Vanden-Broeck and J.B. Keller, Weir flows, J. Fluid Mech. 176 (1987) 283-293.