Applied Mathematical Modelling 38 (2014) 4428–4444
Contents lists available at ScienceDirect
Applied Mathematical Modelling
journal homepage: www.elsevier.com/locate/apm
Asymmetric non-Gaussian effects in a tumor growth model
with immunization q
Mengli Hao a, Jinqiao Duan b,c,⇑, Renming Song d, Wei Xu a
a
Department of Applied Mathematics, Northwestern Polytechnical University, Xi’an 710129, China
Institute for Pure and Applied Mathematics, University of California, Los Angeles, CA 90095, USA
c
Department of Applied Mathematics, Illinois Institute of Technology, Chicago, IL 60616, USA
d
Department of Mathematics, University of Illinois at Urbana-Champaign, Urbana, IL 61801, USA
b
a r t i c l e
i n f o
Article history:
Received 16 October 2012
Received in revised form 6 October 2013
Accepted 13 February 2014
Available online 5 March 2014
Keywords:
Tumor growth with immunization
Stochastic dynamics of tumor growth
Asymmetric a-stable Lévy motion
Lévy jump measure
Mean residence time
Escape probability
a b s t r a c t
The dynamical evolution of a tumor growth model, under immune surveillance and subject
to asymmetric non-Gaussian a-stable Lévy noise, is explored. The lifetime of a tumor
staying in the range between the tumor-free state and the stable tumor state, and the
likelihood of noise-induced tumor extinction, are characterized by the mean residence
time and the escape probability, respectively. For various initial densities of tumor cells,
the mean residence time and the escape probability are computed with different noise
parameters. It is observed that unlike the Gaussian noise or symmetric non-Gaussian noise,
the asymmetric non-Gaussian noise plays a constructive role in the tumor evolution in this
simple model. By adjusting the noise parameters, the mean residence time can be
shortened and the escape probability can be increased, simultaneously. This suggests that
a tumor may be mitigated with higher probability in a shorter time, under certain external
environmental stimuli.
Ó 2014 Elsevier Inc. All rights reserved.
1. Introduction
In recent years, more and more facts have illustrated the important influences of noise on dynamical systems. It is often
assumed that the external noise is Gaussian. This arises due to the assumption that the external perturbation is the result of a
large number of independent interactions of bounded strength [1–5]. However, this assumption is not always suitable to
adequately interpret real data. For instance, when the fluctuations are abrupt pulses or extreme events, the Gaussian
assumption is obviously not proper. In this case, it may be more appropriate to model the fluctuations by a process with
heavy tails and discontinuous sample paths. A class of this kind of processes is the asymmetric a-stable Lévy motion. Noises
following symmetric and asymmetric a-stable laws are abundant in nature and have been observed in various fields of
science [2,6,7].
Moreover, due to the increasing number of people with tumor, cancer research has become a major challenge in medicine
and biology. Because surgeries, chemotherapies and radiotherapies could bring great pain to patients and adversely affect
patients’ life, considerable attention has been paid to understanding immunotherapy, aiming to strengthen the body’s
q
This work was done while Mengli Hao was visiting the Institute for Pure and Applied Mathematics (IPAM), Los Angeles, CA 90095, USA. This work was
supported by the NSFC Grants 11172233, 10932009, 10971225 and 11028102, NSF Grant 1025422 and Simons Foundation Grant 208236.
⇑ Corresponding author at: Institute for Pure and Applied Mathematics, University of California, Los Angeles, CA 90095, USA. Tel.: +1 3102062831.
E-mail addresses: haomengli399@163.com (M. Hao), jduan@ipam.ucla.edu, duan@iit.edu (J. Duan), rsong@math.uiuc.edu (R. Song).
http://dx.doi.org/10.1016/j.apm.2014.02.026
0307-904X/Ó 2014 Elsevier Inc. All rights reserved.
M. Hao et al. / Applied Mathematical Modelling 38 (2014) 4428–4444
4429
own natural ability to combat cancer by enhancing the effectiveness of the immune system. One of the deterministic testbed
models representing the interactions between tumor tissue and immune system is obtained by a ‘‘predator–prey’’ mechanism, in which tumor cells play the role of ‘‘preys’’ whereas the immune cells act as ‘‘predators’’ [1,4,8–12].
A lot of studies have been conducted on the dynamical behaviors of this model driven by different noises, such as Gaussian noise, colored noise and fractional Gaussian noise [3,5,9,11,13–18]. These research works have shown that environmental noises have great impact on the growth and extinction of tumor cells. Furthermore, the dynamical evolution behaves
differently under different noises. Thus, it is important to gain deeper insight into the effects of various noises on this tumor
evolution system.
In this paper, we focus on effects of the asymmetric a-stable Lévy noise on the dynamical behaviors of a tumor cell growth
model with immunization. We evaluate the evolution of the tumor cell density, including the lifetime in the range between
the tumor-free state and the stable tumor state, as well as the likelihood that the tumor cells become extinct, by numerically
examining the mean residence time and the escape probability.
This paper is organized as follows. In Section 2, we introduce the asymmetric a-stable Lévy processes. Section 3 describes
the tumor growth model with immunization, under the influence of asymmetric a-stable Lévy noise. In Section 4, we recall
the integro-differential equations satisfied by the mean residence time u and the escape probability p, and give numerical
algorithms for solving these equations. We present numerical results in Section 5, then finish with conclusions in the final
section.
2. Asymmetric a-stable Lévy motions
A scalar Lévy motion is characterized by a drift parameter l, a non-negative diffusion constant d, and a non-negative Borel
measure m, defined on ðR1 ; BðR1 ÞÞ and concentrated on R1 n f0g. The measure m is called the Lévy jump measure and it has the
following property:
Z
R1 nf0g
ðy2 ^ 1Þ mðdyÞ < 1;
ð1Þ
where a ^ b ¼ minfa; bg. We call ðl; d; mÞ the generating triplet of the Lévy motion Lt .
The generator A of the Lévy motion Lt is defined by Au ¼ limt#0 Pt utu, where Pt uðxÞ ¼ EuðLt Þ and u is any function belonging to the domain of the operator A. Recall that the space C 2b ðR1 Þ, consisting of C 2 functions with bounded derivatives up to
order 2, is contained in the domain of A, and thus for every u 2 C 2b ðR1 Þ (see [19,20])
d
AuðxÞ ¼ lu0 ðxÞ þ u00 ðxÞ þ
2
Z
R1 nf0g
½uðx þ yÞ uðxÞ 1fjyj<1g yu0 ðxÞ mðdyÞ:
ð2Þ
In this paper, we consider a special scalar Lévy motion Lt with the generating triplet ð0; d; ma;b Þ, for the diffusion coefficient
d P 0, stability index a 2 ð0; 2Þ, skewness parameter b 2 ½1; 1 and the Lévy jump measure ma;b . More specifically, the jump
measure is defined as [21,22]:
ma;b ðdyÞ ¼
8
< C 1ady
; y > 0;
jyj þ1
: C 2ady
; y < 0;
jyj þ1
ð3Þ
with C 1 ¼ C a 1þb
and C 2 ¼ C a 1b
, where
2
2
(
Ca ¼
að1aÞ
Cð2aÞ cosðp2aÞ ;
a – 1;
2
a ¼ 1:
p;
Furthermore, b ¼ ðC 1 C 2 Þ=ðC 1 þ C 2 Þ. This Lt is a non-Gaussian process, although it has a Gaussian diffusion component described by the diffusion constant d. When d ¼ 0, this is the well-known asymmetric a-stable Lévy motion, and if additionally
b ¼ 0, it is the symmetric a-stable Lévy motion.
Note that for a Lévy motion Lt , its characteristic function is [20]
E½eikLt ¼ etWðkÞ ;
t P 0; k 2 R1 ;
with WðkÞ a function that does not depend on time t. In other words, eWðkÞ is the characteristic function for L1 . The characteristic function of Lt (at time t) is just the tth power of the characteristic function of L1 (at time 1).
For the a-stable Lévy motion considered here (d ¼ 0), L1 is an a-stable random variable with distribution Sa ð1; b; 0Þ; see
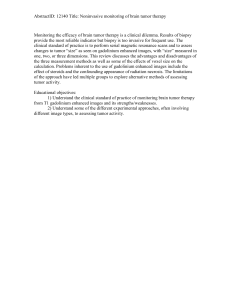
[23, Ch. 1]. Fig. 1 shows the probability density function (PDF) for the a-stable random variable L1 , with various stability indices a and skewness parameters b. The stability index a determines the rate at which the tails of the distribution taper off and
controls the jump frequency or the jump size of the impulse. The small jumps with high frequency correspond to Lévy
motion with the stability index closer to 2, while the large jumps with low frequency correspond to Lévy motion with
the stability index closer to 0 (a highly impulsive process). The skewness parameter characterizes the degree of asymmetry
of distribution function. The nonzero value of the skewness parameter implies the existence of a primary direction of the
random pulses [24,25].
4430
M. Hao et al. / Applied Mathematical Modelling 38 (2014) 4428–4444
0.6
3
β = −1.0
(a)
β =0.0
2.5
β = −1.0
(b)
β = −0.5
β = −0.5
β =0.0
0.5
β = 0.5
β = 0.5
β = 1.0
β = 1.0
0.4
S (1, β ,0)
0.3
α
1.5
α
S (1, β ,0)
2
1
0.2
0.5
0.1
0
−15
−10
−5
0
x
5
10
0
−20
15
0.4
−15
−10
−5
0
x
5
10
β = −1.0
β = −1.0
(d)
β = −0.5
0.35
β = −0.5
0.35
β =0.0
β =0.0
β = 0.5
0.3
β = 0.5
0.3
β = 1.0
β = 1.0
0.25
S α (1, β ,0)
S α (1, β ,0)
0.25
0.2
0.2
0.15
0.15
0.1
0.1
0.05
0.05
0
−15
−10
−5
0
x
5
10
0
−10
15
0.4
−5
0
x
5
10
0.4
(e)
β = −1.0
β = −1.0
(f)
β = −0.5
0.35
β = −0.5
0.35
β =0.0
β =0.0
β = 0.5
0.3
β = 0.5
0.3
β = 1.0
β = 1.0
0.25
S α (1, β ,0)
0.25
S α (1, β ,0)
20
0.4
(c)
0.2
0.2
0.15
0.15
0.1
0.1
0.05
0.05
0
−10
15
−5
0
x
5
10
0
−10
−5
0
x
5
10
Fig. 1. Probability density functions for L1 Sa ð1; b; 0Þ for different values of a and b: (a) a ¼ 0:1, (b) a ¼ 0:5, (c) a ¼ 1, (d) a ¼ 1:5, (e) a ¼ 1:9, (f) a ¼ 2.
3. Tumor growth model subject to an asymmetric Lévy noise
In this section, we consider a tumor growth model under immune surveillance. The reaction between the tumor tissues
and the immune cells is based on a reaction scheme representative of the catalytic Michaelis–Menten scenario [3]. It can be
M. Hao et al. / Applied Mathematical Modelling 38 (2014) 4428–4444
4431
explained as follows: Firstly, the tumor cells denoted by X proliferate in two ways: one is the transformation of normal cells
into neoplastic ones X at a rate j; the other is the replication of the tumor cells at a rate i. Then, the active cytotoxic cells (i.e.,
immune cells) Y bind the tumor cells to the complex Z with the kinetic constant k1 . Lastly, the complex Z dissociates into
immune cells and the dead or non-replicating tumor cells P at a rate proportional to k2 . Schematically, the mechanisms
above can be represented as follows:
j
Normal Cells ! X;
ð4aÞ
i
X ! 2X;
k1
ð4bÞ
k2
X þ Y ! Z ! Y þ P:
ð4cÞ
In order to construct a mathematical model, we can make the following assumptions based on biological principles.
Firstly, because the transformation of normal cells into neoplastic ones originates from environmental carcinogenic agents
rather than spontaneous endogenous somatic mutations, the average rate of this process is very low, compared with the rate
of neoplastic cell replication [4,26] (Typical experimental values are: j the order of 1017 –1018 transformed cell/normal
1
1
1
cell day, i = 0.2–1.5 day , k1 = 0.1–18 day ; k2 = 0.2–18 day as in [13,26]). Thus, we can ignore step (4a). Secondly,
in the reaction process, Y behaves like the enzymes in the Michaelis-Menten reaction, so we consider a conserved mass
of enzymes Y þ Z ¼ E ¼ const. Besides, in the limit case, the production of X-type cells inhibited by a hyperbolic activation
is the slowest process. Therefore, by the assumptions and the quasi-steady-state approximation, the kinetics can be simplified to an equivalent single variable differential equation [13,26]:
dx
x
¼ xð1 hxÞ c
;
dt
xþ1
ð5Þ
with the potential function
UðxÞ ¼ x2 hx3
þ
þ cx c lnðx þ 1Þ;
2
3
ð6Þ
where x is the normalized molecular density of tumor cells with respect to the maximum tissue capacity. And we use the
following scaling formulas in the process of nondimensionalization:
x¼
k1
k2
k1 E
X; h ¼ ; c ¼
; t ¼ it0 :
k2
k1
i
Taking into account the biological significance and convenience of discussion, we choose the parameter ranges as follows:
2
h < 1, 0 < c < ð1þhÞ
. In this case, the deterministic dynamical system Eq. (5) has two stable states and one unstable state (see
4h
[5,26]). Namely, the potential function UðxÞ has two minima: x1 ; x3 and one maximum x2 (see Fig. 2). That is to say, this
system has three meaningful steady states:
2.5
2
U (x)
1.5
1
0.5
0
−1
0
1
2
3
4
5
6
7
8
x
Fig. 2. The potential function UðxÞ for h ¼ 0:1; c ¼ 3:0. The two minima represent the tumor-free state at x1 ¼ 0 and the stable tumor state at x3 ¼ 5,
respectively.
4432
M. Hao et al. / Applied Mathematical Modelling 38 (2014) 4428–4444
x1 ¼ 0;
x2 ¼
x3 ¼
1h
qffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
ð1 þ hÞ2 4ch
2h
qffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
ffi
1 h þ ð1 þ hÞ2 4ch
2h
;
ð7Þ
:
Without random fluctuations, for a given initial condition, the system state will eventually converge to one of the two stable
states: (i) the stable state x1 ¼ 0, called the tumor-free state (or the state of tumor extinction), where no tumor cells exist, (ii)
the stable state x3 , called the stable tumor state, where the tumor cell density does not increase but keeps at a certain constant level.
However, from a biological point of view, the growth rate of tumor tissue is inevitably influenced by many environmental
factors, such as temperature, radiations, chemical agents, the degree of vascularization of tissue, the supply of nutrients, the
immunological state of the host and so on [13,26]. Due to the limitations of the Gaussian noise, in this paper, we consider
more general noise, an asymmetric Lévy noise to represent the environmental fluctuations. Our model is written as follows:
dX t ¼ f ðX t Þdt þ dLt ; Xð0Þ ¼ x;
ð8Þ
where
f ðX t Þ ¼ X t ð1 hX t Þ c
Xt
;
Xt þ 1
and Lt is a Lévy process with the generating triplet ð0; d; ma;b Þ, i.e., drift coefficient 0, diffusion coefficient d P 0 and the Lévy
jump measure ma;b .
Under the effects of environmental fluctuations, the number of tumor cells may fluctuate in the range between the tumor-free state and the stable tumor state denoted by D ¼ ðx1 ; x3 Þ. In this paper, we concentrate on how the tumor density
evolves in the range D and discuss the impacts of the asymmetric Lévy noise on the time that the density of tumor cells stays
in the range D and the probability it exits D from the left side, i.e., becoming tumor-free.
4. Mean residence time, escape probability and numerical algorithms
In this section, we discuss mean residence time, escape probability and their numerical schemes in order to quantify the
dynamics of the stochastic differential equation (8).
4.1. Mean residence time
First, we recall the definition of the first exit time from the bounded domain D ¼ ðx1 ; x3 Þ:
sðxÞ ¼ infft > 0; X t ðx; xÞ R Dg:
The mean residence time uðxÞ ¼ EsðxÞ then satisfies the following integro-differential equation [27] with an exterior boundary condition
AuðxÞ ¼ 1; x 2 D;
ð9Þ
u ¼ 0; x 2 Dc ;
where the generator A of the solution process XðtÞ is
d
Au ¼ f ðxÞu0 ðxÞ þ u00 ðxÞ þ
2
Z
R1 nf0g
½uðx þ yÞ uðxÞ 1fjyj<1g yu0 ðxÞ ma;b ðdyÞ:
ð10Þ
4.2. Escape probability
Now, we consider the escape probability of paths whose motion is described by Eq. (8). The likelihood that XðtÞ, starting at
a point x, first exits from the domain D by landing in the subset E of Dc is called the escape probability and is denoted as pðxÞ.
This escape probability solves the following exterior Dirichlet problem [28,29]:
A pðxÞ ¼ 0;
p ¼ h;
x 2 D;
x 2 Dc ;
where A is the generator defined in (10) and the function h is defined as:
h¼
1; x 2 E;
0; x 2 Dc n E:
ð11Þ
4433
M. Hao et al. / Applied Mathematical Modelling 38 (2014) 4428–4444
We are concerned with how to enhance the likelihood of tumor extinction, so we choose E ¼ ð1; x1 , i.e., we examine the
likelihood that the tumor state goes from D ¼ ðx1 ; x3 Þ (tumor) to E ¼ ð1; x1 (tumor free).
4.3. Numerical algorithms
We only describe the numerical algorithms for Eq. (11), as the algorithm for Eq. (9) is similar. The algorithm below extends a numerical scheme in [30] for the case of symmetric Lévy noise to the case of asymmetric Lévy noise. For convenience,
we use a general interval D ¼ ða; bÞ, instead of D ¼ ðx1 ; x3 Þ, in the following spatial discretization. Using (3), Eq. (11) can be
rewritten as:
d 00
p ðxÞ þ f ðxÞp0 ðxÞ þ
2
Z
R1 nf0g
pðx þ yÞ pðxÞ 1fjyj<1g yp0 ðxÞ
"
C 1 1ð0;þ1Þ ðyÞ
jyj1þa
þ
C 2 1ð1;0Þ ðyÞ
jyj1þa
#
dy ¼ 0;
ð12Þ
for x 2 ða; bÞ; pðxÞ ¼ 1 for x 2 ð1; a and pðxÞ ¼ 0 for x 2 ½b; þ1Þ. Thus, we obtain:
d 00
p ðxÞ þ f ðxÞp0 ðxÞ þ C 2
2
Z
pðx þ yÞ pðxÞ 1fjyj<1g yp0 ðxÞ
1þa
jyj
R1 nf0g
dy þ ðC 1 C 2 Þ
Z
pðx þ yÞ pðxÞ 1fjyj<1g yp0 ðxÞ
jyj1þa
R1þ
dy ¼ 0:
ð13Þ
Because
R
1fjyj<1g yp0 ðxÞ
1fjyj<dg yp0 ðxÞ
dy ¼ 0 for any d > 0, we can replace the former by the latter in (13). To take care
R
R ax R bx R þ1
of the external condition, we divide the integral as R1 ¼ 1 þ ax þ bx and choose d ¼ minfja xj; jb xjg, and then we
get the following formula:
R1 nf0g
jyj1þa
dy ¼
R
R1 nf0g
jyj1þa
Z ax
Z 1
pðx þ yÞ pðxÞ 1fjyj<dg yp0 ðxÞ
pðx þ yÞ pðxÞ 1fjyj<dg yp0 ðxÞ
d 00
p ðxÞ þ f ðxÞp0 ðxÞ þ C 2
dy
þ
C
dy
2
1þ
a
2
jyj
jyj1þa
1
bx
Z bx
Z
pðx þ yÞ pðxÞ 1fjyj<dg yp0 ðxÞ
pðx þ yÞ pðxÞ 1fjyj<1g yp0 ðxÞ
dy
þ
ðC
C
Þ
dy ¼ 0:
þ C2
1
2
1þa
1þ
jyj
jyj1þa
ax
R
ð14Þ
By direct calculations, (14) can be further rewritten as:
Z bx
Z xa
d 00
C2
1
1
pðx þ yÞ pðxÞ
pðx þ yÞ pðxÞ yp0 ðxÞ
p ðxÞ þ f ðxÞp0 ðxÞ dy
þ
C
dy
2
aþ
a pðxÞ þ C 2
1þa
2
a ðx aÞ ðb xÞ
jyj
jyj1þa
xa
ax
Z
pðx þ yÞ pðxÞ 1fjyj<1g yp0 ðxÞ
C2
1
;
ð15Þ
þ ðC 1 C 2 Þ
dy ¼ 1þ
a ðx aÞa
jyj1þa
R
for x < aþb
, and
2
Z xb
Z bx
d 00
C2
1
1
pðx þ yÞ pðxÞ
pðx þ yÞ pðxÞ yp0 ðxÞ
p ðxÞ þ f ðxÞp0 ðxÞ dy
þ
C
dy
2
aþ
a pðxÞ þ C 2
1þa
2
a ðx aÞ ðb xÞ
jyj
jyj1þa
ax
xb
Z
pðx þ yÞ pðxÞ 1fjyj<1g yp0 ðxÞ
C2
1
;
ð16Þ
þ ðC 1 C 2 Þ
dy ¼ 1þ
a ðx aÞa
jyj1þa
R
for x P aþb
.
2
For the last term on the left hand of Eq. (14), we have (Here, we omit the coefficient ðC 1 C 2 Þ and assume b a > 1.)
Z
R1þ
pðx þ yÞ pðxÞ 1fjyj<1g yp0 ðxÞ
jyj
1þa
dy ¼
Z
1
pðx þ yÞ pðxÞ yp0 ðxÞ
jyj
0
þ
Z
þ1
jyj
bx
þ
Z
pðxÞ
bx
1þa
1þa
dy ¼
Z
1
bx
pðx þ yÞ pðxÞ
jyj1þa
pðx þ yÞ pðxÞ yp0 ðxÞ
jyj1þa
0
jyj1þa
Z
1
pðx þ yÞ pðxÞ
1
dy þ
dy pðxÞ
aðb xÞa
dy
dy
ð17Þ
;
for x 6 b 1, i.e., b x P 1, and
Z
Rþ
pðx þ yÞ pðxÞ 1fjyj<1g yp0 ðxÞ
jyj
1þa
dy ¼
Z
bx
pðx þ yÞ pðxÞ yp0 ðxÞ
jyj1þa
0
Z
1
bx
for x > b 1, i.e., b x < 1.
Z
pðxÞ þ yp0 ðxÞ
jyj
1þa
1
pðxÞ þ yp0 ðxÞ
bx
jyj1þa
dy Z
dy
þ1
jyj
1
dy pðxÞ
a
pðxÞ
;
1þa
dy ¼
Z
0
bx
pðx þ yÞ pðxÞ yp0 ðxÞ
jyj1þa
dy
ð18Þ
4434
M. Hao et al. / Applied Mathematical Modelling 38 (2014) 4428–4444
Now, let us take the appropriate stepsize h, so that 1h ; ha ; hb ; aþb
are integers, and define xj ¼ jh for ab
6 j 6 ba
. We use the
2h
h
h
notation Pj to indicate the numerical solution of p at xj . Then, the first four terms on the left hand of Eqs. (15) and (16) can be
discretized, respectively, by the central difference scheme for derivatives and ‘‘punched-hole’’ trapezoidal rule:
"
#
bj
jha
h
X
X
00 P jþk P j
00
P jþk P j ðP jþ1 Pj1 Þxk =2h
d P j1 2P j þ Pjþ1
P jþ1 Pj1 C 2
1
1
P þC h
þ f ðxj Þ
þ
þ C2 h
;
2
2
2h
a ðxj aÞa ðb xj Þa j 2 k¼ja jxk j1þa
jxk j1þa
a
h
k¼ j;k–0
h
ð19Þ
h
where j ¼ ha þ 1; ha þ 2; . . . ; aþb
1. The meaning of the modified summation symbol
2h
to the two endpoints of the integral interval should be multiplied by 1=2.
P00
is that the quantities corresponding
"
#
bj
jb
h
Xh00 P jþk P j
X
00
P jþk P j ðP jþ1 P j1 Þxk =2h
d Pj1 2P j þ P jþ1
Pjþ1 P j1 C 2
1
1
P þC h
þ f ðxj Þ
þ
þ C2 h
;
2
1þa
2h
a ðxj aÞa ðb xj Þa j 2 k¼aj jxk j1þa
2
jxk j
h
b
k¼j ;k–0
h
ð20Þ
h
where j ¼ aþb
; aþb
þ 1; . . . ; hb 1.
2h
2h
For the last term on the left hand of Eqs. (15) and (16), we use the upwind finite difference scheme. That is, when
R
1
y
dy > 0, we use the forward finite difference scheme to discretize p0 ðxÞ, while when
ðC 1 C 2 Þ R1þ fjyj<1g
jyj1þa
R
1fjyj<1g y
ðC 1 C 2 Þ R1þ jyj1þa dy 6 0, we use the backward finite difference scheme to discretize p0 ðxÞ, i.e., as in [31],
0
p ðxÞ ¼
8 pðxþhÞpðxÞ
<
;
h
: pðxÞpðxhÞ ;
h
ðC 1 C 2 Þ
R
ðC 1 C 2 Þ
R
R1þ
R1þ
1fjyj<1g y
jyj1þa
1fjyj<1g y
jyj1þa
dy > 0;
dy 6 0:
ð21Þ
So the formula (17) can be discretized as:
bj
1
h
h
X
X
00 P jþk P j
00 P jþk P j ðP jþ1 P j Þxk =h
1
þ
h
;
a Pj þ h
1þa
aðb xj Þ
jxk j
jxk j1þa
k¼0;k–0
k¼1
ð22Þ
h
for b < 0, and
bj
1
h
h
X
X
00 P jþk P j
00 P jþk P j ðP j P j1 Þxk =h
1
þh
;
a Pj þ h
1þa
aðb xj Þ
jx
j
jxk j1þa
1
k
k¼0;k–0
k¼
ð23Þ
h
for b P 0. By the same reason, we can get the discretization for the formula (18):
1
bj
h
h
X
X
00 P j ðP jþ1 P j Þxk =h
00 P jþk P j ðP jþ1 P j Þxk =h
Pj þ h
þ
h
;
1þa
a
jxk j
jxk j1þa
bj
k¼0;k–0
1
ð24Þ
h
for b < 0, and
1
bj
h
h
X
X
00 P j ðP j P j1 Þxk =h
00 P jþk P j ðP j P j1 Þxk =h
1
Pj þ h
þh
;
1þ
a
a
jxk j
jxk j1þa
bj
k¼0;k–0
ð25Þ
h
for b P 0. The boundary conditions require that Pj ¼ 1 for j 6 ha and Pj ¼ 0 for j P hb.
The right hand of Eq. (15) can be discretized as:
1
a :
a ðxj aÞ
C2
ð26Þ
Thus, we can obtain the escape probability pðxÞ; x 2 D, by solving Eqs. (19)–(26).
The numerical scheme to solve Eq. (9) for mean residence time uðxÞ is similar.
5. Numerical results
We fix the chemical system parameters h ¼ 0:1; c ¼ 3:0 as suggested in [3], and focus on the impact of asymmetric
Lévy noise on the mean residence time u and the escape probability p, in order to gain understanding of the tumor
evolution under uncertainty. With these parameters, the stable states of the deterministic tumor growth model are
x1 ¼ 0 and x3 ¼ 5. The interval D ¼ ð0; 5Þ encloses the tumor cell density from 0 (tumor-free state) to 5 (stable
tumor state).
4435
M. Hao et al. / Applied Mathematical Modelling 38 (2014) 4428–4444
5.1. Mean residence time
We compute the mean residence time uðxÞ of the tumor density X t from x 2 D ¼ ð0; 5Þ, between the tumor-free state and
the stable tumor state. For example, uð3Þ is the mean time that the tumor cell density, starting at the initial density 3,
1.8
1.4
β=−1.0
β=−1.0
β=−0.5
1.2
β=0.0
β=0.0
β=0.5
β=0.5
1.4
β=1.0
β=1.0
Mean Residence Time
1
Mean Residence Time
β=−0.5
1.6
0.8
0.6
0.4
1.2
1
0.8
0.6
0.4
0.2
0.2
(a)
0
0
1
2
3
4
0
5
(b)
0
1
2
3
4
2.5
3
β=−1.0
β=−1.0
β=−0.5
β=−0.5
β=0.0
2
β=0.0
2.5
β=0.5
β=0.5
β=1.0
Mean Residence Time
Mean Residence Time
β=1.0
1.5
1
0.5
2
1.5
1
0.5
(c)
0
0
(d)
1
2
3
4
0
5
0
1
2
x
3
4
5
x
3
4
β=−1.0
β=−1.0
β=−0.5
β=−0.5
3.5
β=0.0
2.5
β=0.0
β=0.5
β=0.5
3
β=1.0
2
Mean Residence Time
Mean Residence Time
5
x
x
1.5
1
β=1.0
2.5
2
1.5
1
0.5
0.5
(e)
0
0
(f)
1
2
3
x
4
5
0
0
1
2
3
4
5
x
Fig. 3. Mean residence time uðxÞ with pure a-stable Lévy noise (i.e. d ¼ 0): (a) a ¼ 0:1, (b) a ¼ 0:5, (c) a ¼ 1:0, (d) a ¼ 1:5, (e) a ¼ 1:77, (f) a ¼ 1:9.
4436
M. Hao et al. / Applied Mathematical Modelling 38 (2014) 4428–4444
remains within the range D, before ‘exiting’ to outside D. It quantifies how long the tumor cell density stays between 0 (tumor-free state) and 5 (stable tumor state).
In Figs. 3 and 4, we observe that when the stability index a is fixed approximately below 1.77, for the inchoate patients,
smaller skewness parameter b leads to shorter mean residence time. While for the advanced patients, the situation becomes
1.4
1.4
β=−1.0
β=−1.0
β=−0.5
1.2
β=−0.5
1.2
β=0.0
β=0.0
β=0.5
β=1.0
1
Mean Residence Time
Mean Residence Time
β=0.5
β=1.0
1
0.8
0.6
0.4
0.2
0.8
0.6
0.4
0.2
(b)
(a)
0
0
1
2
3
4
0
5
0
1
2
x
3
4
1.8
1.8
β=−1.0
β=−1.0
β=−0.5
1.6
β=−0.5
1.6
β=0.0
β=0.0
β=0.5
1.4
β=0.5
1.4
β=1.0
1.2
Mean Residence Time
Mean Residence Time
β=1.0
1
0.8
0.6
0.4
1.2
1
0.8
0.6
0.4
0.2
0
5
x
0.2
(c)
0
1
2
3
4
0
5
(d)
0
1
2
x
3
4
5
x
2.5
β=−1.0
β=−0.5
β=0.0
2
β=0.5
Mean Residence Time
β=1.0
1.5
1
0.5
(e)
0
0
1
2
3
4
5
x
Fig. 4. Mean residence time uðxÞ when pure a-stable Lévy noise is combined with Gaussian noise (i.e. d ¼ 1:0): (a) a ¼ 0:1, (b) a ¼ 0:5, (c) a ¼ 1:0, (d)
a ¼ 1:5; (e) a ¼ 1:9.
4437
M. Hao et al. / Applied Mathematical Modelling 38 (2014) 4428–4444
opposite. This suggests that asymmetry in the noise (described by b) plays a crucial role in the time span a patient remains in
the tumor state, and this role is opposite for inchoate and advanced patients. Besides, when the stability index a P 1:77, for
all the patients, the mean residence time u decreases as the skewness parameter b decreases. From the Figs. 5 and 6, we find
that when the skewness parameter b is fixed, the behavior of the mean residence time under various stability indices a is
2.5
2.5
α=0.1
α=0.1
α=0.5
α=0.5
α=1.0
2
α=1.0
2
α=1.5
α=1.5
α=1.9
Mean Residence Time
Mean Residence Time
α=1.9
1.5
1
0.5
1.5
1
0.5
(a)
0
0
(b)
1
2
3
4
0
5
0
1
2
x
3
4
3
3.5
α=0.1
α=0.1
α=0.5
α=0.5
3
α=1.0
2.5
α=1.0
α=1.5
α=1.5
α=1.9
2.5
2
Mean Residence Time
Mean Residence Time
α=1.9
1.5
1
0.5
2
1.5
1
0.5
(c)
0
5
x
0
(d)
1
2
3
4
0
5
0
1
2
x
3
4
5
x
4
α=0.1
α=0.5
3.5
α=1.0
α=1.5
Mean Residence Time
3
α=1.9
2.5
2
1.5
1
0.5
(e)
0
0
1
2
3
4
5
x
Fig. 5. Mean residence time uðxÞ with pure a-stable Lévy noise (i.e. d ¼ 0): (a) b ¼ 1:0, (b) b ¼ 0:5, (c) b ¼ 0:0, (d) b ¼ 0:5, (e) b ¼ 1:0.
4438
M. Hao et al. / Applied Mathematical Modelling 38 (2014) 4428–4444
1.8
1.8
α=0.1
α=0.1
α=0.5
1.6
α=0.5
1.6
α=1.0
α=1.0
α=1.5
1.4
α=1.5
1.4
α=1.9
1.2
Mean Residence Time
Mean Residence Time
α=1.9
1
0.8
0.6
0.4
1
0.8
0.6
0.4
0.2
0
1.2
0.2
(a)
0
1
2
3
4
0
5
(b)
0
1
2
x
3
4
2
2.5
1.8
α=0.1
α=0.1
α=0.5
α=0.5
α=1.0
1.6
α=1.5
α=1.9
α=1.9
Mean Residence Time
Mean Residence Time
α=1.0
2
α=1.5
1.4
1.2
1
0.8
0.6
0.4
1.5
1
0.5
0.2
0
5
x
(c)
0
(d)
1
2
3
4
0
5
0
1
2
x
3
4
5
x
2.5
α=0.1
α=0.5
α=1.0
2
α=1.5
Mean Residence Time
α=1.9
1.5
1
0.5
(e)
0
0
1
2
3
4
5
x
Fig. 6. Mean residence time uðxÞwhen pure a-stable Lévy noise is combined with Gaussian noise (i.e. d ¼ 1:0): (a) b ¼ 1:0, (b) b ¼ 0:5, (c) b ¼ 0:0, (d)
b ¼ 0:5, (e) b ¼ 1:0.
similar to the symmetric case (Figs. 5(c) and 6(c) for b ¼ 0). That is, at the early (x near 0) and advanced (x close to 5) tumor
stages, the mean residence time decreases as the stability index a increases, while in the middle tumor stage, this relationship becomes reversed. Moreover, comparing Fig. 3 with Fig. 4, and also Fig. 5 with Fig. 6, we notice that the input of the
4439
M. Hao et al. / Applied Mathematical Modelling 38 (2014) 4428–4444
Gaussian noise component (i.e., the diffusion coefficient d > 0) just shortens the mean residence time, but appears not to
change the evolution rules essentially.
Fig. 11 is a 3D plot of the above numerical results.
1
1
β=−1.0
β=−1.0
β=−0.5
0.9
β=−0.5
0.9
β=0.0
0.8
β=0.5
β=1.0
0.6
0.5
0.4
0.3
0.2
β=1.0
0.6
0.5
0.4
0.3
0.2
0.1
0
β=0.5
0.7
Escape Probability
0.7
Escape Probability
β=0.0
0.8
0.1
(a)
0
1
2
3
4
0
5
(b)
0
1
2
x
3
4
1
1
β=−1.0
β=−1.0
β=−0.5
0.9
β=−0.5
0.9
β=0.0
0.8
β=1.0
β=0.5
β=1.0
0.7
Escape Probability
Escape Probability
β=0.0
0.8
β=0.5
0.7
0.6
0.5
0.4
0.3
0.2
0.6
0.5
0.4
0.3
0.2
0.1
0
5
x
0.1
(c)
0
1
2
3
4
0
5
(d)
0
1
2
x
3
4
5
x
1
β=−1.0
β=−0.5
0.9
β=0.0
0.8
β=0.5
β=1.0
Escape Probability
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
(e)
0
1
2
3
4
5
x
Fig. 7. Escape probability pðxÞ with pure a-stable Lévy noise (i.e. d ¼ 0): (a) a ¼ 0:1, (b) a ¼ 0:5, (c) a ¼ 1:0, (d) a ¼ 1:5, (e) a ¼ 1:9.
4440
M. Hao et al. / Applied Mathematical Modelling 38 (2014) 4428–4444
1
1
β=−1.0
β=−1.0
β=−0.5
0.9
β=−0.5
0.9
β=0.0
β=0.0
0.8
β=0.5
β=1.0
0.6
0.5
0.4
0.3
β=1.0
0.6
0.5
0.4
0.3
0.2
0.2
0.1
0
β=0.5
0.7
Escape Probability
0.7
Escape Probability
0.8
0.1
(a)
0
1
2
3
4
0
5
(b)
0
1
2
3
4
1
1
β=−1.0
β=−1.0
β=−0.5
0.9
β=−0.5
0.9
β=0.0
0.8
β=1.0
β=0.5
β=1.0
0.7
Escape Probability
Escape Probability
β=0.0
0.8
β=0.5
0.7
0.6
0.5
0.4
0.3
0.2
0.6
0.5
0.4
0.3
0.2
0.1
0
5
x
x
0.1
(c)
0
1
2
3
4
0
5
(d)
0
1
2
3
x
4
5
x
1
β=−1.0
β=−0.5
0.9
β=0.0
0.8
β=0.5
β=1.0
Escape Probability
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
(e)
0
1
2
3
4
5
x
Fig. 8. Escape probability pðxÞ when pure a-stable Lévy noise is combined with Gaussian noise (i.e. d ¼ 1:0): (a) a ¼ 0:1, (b) a ¼ 0:5, (c) a ¼ 1:0, (d) a ¼ 1:5,
(e) a ¼ 1:9.
4441
M. Hao et al. / Applied Mathematical Modelling 38 (2014) 4428–4444
1
1
α=0.1
α=0.1
α=0.5
0.9
α=0.5
0.9
α=1.0
0.8
α=1.9
0.6
0.5
0.4
0.3
0.2
α=1.9
0.6
0.5
0.4
0.3
0.2
0.1
0
α=1.5
0.7
Escape Probability
0.7
Escape Probability
α=1.0
0.8
α=1.5
0.1
(a)
0
1
2
3
4
0
5
(b)
0
1
2
3
x
4
1
1
α=0.1
α=0.1
α=0.5
0.9
α=0.5
0.9
α=1.0
0.8
α=1.9
α=1.5
α=1.9
0.7
Escape Probability
Escape Probability
α=1.0
0.8
α=1.5
0.7
0.6
0.5
0.4
0.3
0.2
0.6
0.5
0.4
0.3
0.2
0.1
0
5
x
0.1
(c)
0
1
2
3
4
0
5
(d)
0
1
2
3
x
4
5
x
1
α=0.1
α=0.5
0.9
α=1.0
0.8
α=1.5
α=1.9
Escape Probability
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
(e)
0
1
2
3
4
5
x
Fig. 9. Escape probability pðxÞ with pure a-stable Lévy noise (i.e. d ¼ 0): (a) b ¼ 1:0, (b) b ¼ 0:5, (c) b ¼ 0:0, (d) b ¼ 0:5, (e) b ¼ 1:0.
5.2. Escape probability
We would like to do further investigation on the tumor evolution after the system exits the interval D ¼ ð0; 5Þ. Will it
reach the tumor-free state (exit to the left of D ¼ ð0; 5ÞÞ? We compute the escape probability pðxÞ, i.e., the likelihood that
4442
M. Hao et al. / Applied Mathematical Modelling 38 (2014) 4428–4444
the tumor cell density x 2 ð0; 5Þ becomes tumor-free (x ¼ 0). See Figs. 7–10. In these figures, high escape probability p values
indicate high likelihood for a tumor to become tumor-free.
In Figs. 7 and 8, we observe that when the stability index a is fixed, either with or without Gaussian noise component (i.e.,
diffusion coefficient d ¼ 0 or d ¼ 1), the escape probability p increases as the skewness parameter b decreases. Besides, the
1
1
α=0.1
α=0.1
α=0.5
0.9
α=0.5
0.9
α=1.0
0.8
α=1.9
0.6
0.5
0.4
0.3
0.2
α=1.9
0.6
0.5
0.4
0.3
0.2
0.1
0
α=1.5
0.7
Escape Probability
0.7
Escape Probability
α=1.0
0.8
α=1.5
0.1
(a)
0
1
2
3
4
0
5
(b)
0
1
2
3
x
4
1
1
α=0.1
α=0.1
α=0.5
0.9
α=0.5
0.9
α=1.0
0.8
α=1.9
α=1.5
α=1.9
0.7
Escape Probability
Escape Probability
α=1.0
0.8
α=1.5
0.7
0.6
0.5
0.4
0.3
0.2
0.6
0.5
0.4
0.3
0.2
0.1
0
5
x
0.1
(c)
0
1
2
3
4
0
5
(d)
0
1
2
3
x
4
5
x
1
α=0.1
α=0.5
0.9
α=1.0
0.8
α=1.5
α=1.9
Escape Probability
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
(e)
0
1
2
3
4
5
x
Fig. 10. Escape probability pðxÞ when pure a-stable Lévy noise is combined with Gaussian noise (i.e. d ¼ 1:0): (a) b ¼ 1:0, (b) b ¼ 0:5, (c) b ¼ 0:0, (d)
b ¼ 0:5, (e) b ¼ 1:0.
M. Hao et al. / Applied Mathematical Modelling 38 (2014) 4428–4444
4443
smaller the stability index a is, the more effects the skewness parameter b has on the escape probability. As the stability
index a becomes larger (close to 2), for all the skewness parameter b, the escape probability tends to the symmetric case
(i.e. b ¼ 0). Especially, when a ¼ 1:9 (see Figs. 7(e) and 8(e)), the escape probability does not change much with the skewness
parameter b.
As seen in Figs. 9 and 10, when the skewness parameter b is near the extremes, the escape probability increases as the
stability index a either decreases (in the b 6 0:99 case) or increases (in the b P 0:99 case). However, when
0:99 < b < 0:99, due to the competition between the stability index a and the skewness parameter b, the behavior of
the escape probability does not change monotonically with a. Instead, they are similar to the symmetric case (see
Figs. 9(c) and 10(c) for b ¼ 0 case), in which case there exists a critical point. When the density of the tumor cells is less than
the critical point, the escape probability increases with the increasing a. While when the density of the tumor cells is more
than the critical point, the escape probability shows an opposite trend with the increasing a.
Fig. 12 is a 3D plot of the above numerical results.
In this biological setting, the escape probability means the likelihood of the tumor extinction, while the mean residence
time quantifies the time that the density of tumor cells remains in the range between the tumor-free state and the stable
tumor state. From the medical point of view, the clinicians focus primarily on the probability of tumor extinction, so high
escape probability is preferred. With the high probability of tumor extinction, clinicians also want to shorten the mean residence time (during which patients endure the pain from medical treatment such as radiation or chemotherapy). By comparing these figures, we find that the smaller the stability index a and the skewness parameter b are, the higher the
Fig. 11. Mean residence time uðxÞ in 3-dimension plane: (a) d ¼ 0; a ¼ 0:1, (b) d ¼ 1; a ¼ 0:1.
Fig. 12. Escape probability pðxÞ in 3-dimension plane: (a) d ¼ 0; b ¼ 1:0, (b) d ¼ 1:0; b ¼ 1:0.
4444
M. Hao et al. / Applied Mathematical Modelling 38 (2014) 4428–4444
escape probability p grows and simultaneously, the shorter the mean residence time u becomes. Especially, when a ¼ 0:1
and b ¼ 1:0, no matter at what tumor stage (either the early stage or the advanced stage) the patients are, the probability
of curing the tumor is almost surely (see Fig. 7(a)). It implies that when the immunological state of the host is better (b is
close to 1), the therapy with the big stimulus such as radiotherapy and surgeries (a is close to 0) may be adopted to eliminate tumor in a shorter time. This is different from the symmetric noise case, which suggests that we should make the therapy strategy according to the stage of the patients (see Figs. 9(c) and 10(c)).
According to our results for this specific simple model and the roles of the stability index and the skewness parameter in
modeling the environmental fluctuations (see Section 2), we find these two noise parameters play a constructive role in the
tumor evolution. Thus, the environmental factors may be used to mitigate tumor [32,33].
6. Conclusions
In this paper, we have examined the impact of asymmetric non-Gaussian environmental fluctuations on the dynamical
evolution of a tumor growth model with immunization. The mean residence time and the escape probability are computed
to quantify the mean lifetime the tumor cells remain between the tumor-free state and the stable tumor state, and the likelihood that tumor with a certain initial density becomes extinct (i.e., tumor-free). These two quantities are described by exterior boundary value problems involving nonlocal operators. By the numerical experiments, we find that the parameters of
asymmetric Lévy noise have significant influences on the mean residence time and the escape probability. Especially, the
skewness parameter plays an important role in controlling the tumor cells evolution. By choosing the appropriate skewness
parameter, we observe that it is likely to slow the tumor progression and at the same time, enhance the likelihood to induce
tumor extinction.
Acknowledgment
We would like to thank Xiaofan Li and Ting Gao for helpful discussions on the numerical scheme.
References
[1] T. Bose, S. Trimper, Stochastic model for tumor growth with immunization, Phys. Rev. E 79 (2009) 051903.
[2] B. Dybiec, E. Gudowska-Nowak, Stationary states in Langevin dynamics under asymmetric Lévy noises, Phys. Rev. E 76 (2007) 041122.
[3] A. Fiasconaro, B. Spagnolo, Co-occurrence of resonant activation and noise-enhanced stability in a model of cancer growth in the presence of immune
response, Phys. Rev. E 74 (2006) 041904.
[4] W. Horsthemke, R. Lefever, Noise-Induced Transitions. Theory and Applications in Physics, Chemistry and Biology, Springer-Verlag, Berlin, 1984.
[5] D. Li, W. Xu, Y. Guo, Y. Xu, Fluctuations induced extinction and stochastic resonance effect in a model of tumor growth with periodic treatment, Phys.
Lett. A 375 (2011) 886–890.
[6] O. Barndorff-Nielsen, T. Mikosch, S. Resnick, Lévy Processes: Theory and Applications, Birkhäuser, Boston, 2001.
[7] A.E. Kyprianou, Introductory Lectures on Fluctuations of Lévy Processes with Applications, Springer, 2006.
[8] R.P. Garay, R. Lefever, A kinetic approach to the immunology of cancer: stationary states properties of effector-target cell reactions, J. Theor. Biol. 73
(1978) 417–438.
[9] L. Jiang, X. Luo, D. Wu, S. Zhu, Stochastic properties of tumor growth driven by white Lévy noise, Mod. Phys. Lett. B 26 (2012) 1250149.
[10] D. Kirschner, J.C. Panetta, Modeling immunotherapy of the tumor-immune interaction, J. Math. Biol. 37 (1998) 235–252.
[11] Y. Xu, J. Feng, J. Li, H. Zhang, Stochastic bifurcation for a tumor-immune system with symmetric Lévy noise, Physica A 392 (2013) 4739–4748.
[12] W. Zhong, Y. Shao, Z. He, Pure multiplicative stochastic resonance of a theoretical anti-tumor model with seasonal modulability, Phys. Rev. E 73 (2006)
060902.
[13] A. Fiasconaro, A. Ochab-Marcinek, B. Spagnolo, E. Gudowska-Nowak, Monitoring noise-resonant effects in cancer growth influenced by external
fluctuations and periodic treatment, Eur. Phys. J. B 65 (2008) 435–442.
[14] F. Li, B. Ai, Fractional Gaussian noise-induced evolution and transition in anti-tumor model, Eur. Phys. J. B 85 (2012) 74.
[15] A. Ochab-Marcinek, E. Gudowska-Nowak, Population growth and control in stochastic models of cancer development, Physica A 343 (2004) 557–572.
[16] J. Ren, C. Li, T. Gao, K. Kan, J. Duan, Mean exit time and escape probability for a tumor growth system under non-Gaussian noise, Int. J. Bifur. Chaos 22
(2012) 1250090.
[17] C. Zeng, H. Wang, Colored noise enhanced stability in a tumor cell growth system under immune response, J. Stat. Phys. 141 (2010) 889–908.
[18] C. Zeng, X. Zhou, S. Tao, Cross-correlation enhanced stability in a tumor cell growth model with immune surveillance driven by cross-correlated noises,
J. Phys. A: Math. Theor. 42 (2009) 495002.
[19] S. Albeverrio, B. Rüdiger, J. Wu, Invariant measures and symmetry property of Lévy type operators, Potential Anal. 13 (2000) 147–168.
[20] D. Applebaum, Lévy Processes and Stochastic Calculus, second ed., Cambridge University Press, Cambridge, UK, 2009.
[21] C. Hein, P. Imkeller, I. Pavlyukevich, Limit theorems for p-variations of solutions of SDEs driven by additive stable Lévy noise and model selection for
paleo-climatic data, Interdiscip. Math. Sci. 8 (2009) 137–150.
[22] J. Poirot, P. Tankov, Monte carlo option pricing for tempered stable (CGMY) processes, Asia-Pac. Financ. Markets 13 (2006) 327–344.
[23] A. Janicki, A. Weron, Simulation and Chaotic Behavior of -Stable Stochastic Processes, Marcel Dekker Inc., 1994.
[24] J. Mcculloch, Measuring tail thickness to estimate the stable index: acritique, J. Bus. Econ. Stat. 15 (1997) 74–81.
[25] J. Nolan, Parameterizations and modes of stable distributions, Stat. Probab. Lett. 38 (1998) 187–195.
[26] R. Lefever, W. Horsthemk, Bistability in fluctuating environments. Implications in tumor immumology, Bull. Math. Biol. 41 (1979) 469–490.
[27] H. Chen, J. Duan, X. Li, C. Zhang, A computational analysis for mean exit time under non-Gaussian Lévy noises, Appl. Math. Comput. 218 (2011) 1845–
1856.
[28] M. Liao, The Dirichlet problem of a discontinuous Markov process, Acta Math. Sin. (New Series) 5 (1) (1989) 9–15.
[29] H. Qiao, X. Kan, J. Duan, Escape probability for stochastic dynamical systems with jumps, Malliavin Calc. Stoch. Anal. 34 (2013) 195–216.
[30] T. Gao, J. Duan, X. Li, R. Song, Mean exit time and escape probability for dynamical systems driven by Lévy noise, SIAM J. Sci. Computing (2014),
submitted for publication.
[31] S. Cifani, E. Jakobsen, On numerical methods and error estimates for degenerate fractional convection-diffusion equations, Numer. Math. (2013).
[32] R. Evans, Environmental control and immunotherapy for allergic disease, J. Allergy Clin. Immunol. 90 (1992) 462–468.
[33] L. Zheng, M. Chen, Q. Nie, External noise control in inherently stochastic biological systems, J. Math. Phys. 53 (2012) 115616.