Density Approach in Modeling Successive Defaults
advertisement

c 2015 Society for Industrial and Applied Mathematics
!
SIAM J. FINANCIAL MATH.
Vol. 6, pp. 1–21
Density Approach in Modeling Successive Defaults∗
Nicole El Karoui†, Monique Jeanblanc‡, and Ying Jiao§
Abstract. We apply the density framework developed in [N. El Karoui, M. Jeanblanc, and Y. Jiao, Stochastic
Process. Appl., 120 (2010), pp. 1011–1032] to the modeling of successive multiple defaults. Under the
hypothesis of existence of the joint density of the ordered default times with respect to a reference
filtration, we present general pricing results and establish links with the classical intensity approach;
in particular, we emphasize the impact of default events at successive default times. Explicit models,
constructed using the methods of change of probability measure or dynamic copula, are proposed.
Key words. default density approach, multiple defaults, contagion risks
AMS subject classifications. 91G40, 60G55, 91G80
DOI. 10.1137/130939791
1. Introduction. In credit risk analysis, the dependence of default times is one of the
most important issues for both portfolio credit derivatives as well as contagious credit risks
management. In the literature, the modeling of multiple credit names is diversified in two
directions by using the so-called bottom-up and top-down models. In the former approach, one
starts with a model for the marginal distribution of each default time, and then the correlation
between them is made precise. In these models, the individual default information is taken
into account. Copula models are often used for the correlation structure (see Frey and McNeil
[13] for a survey). When it concerns a large number of credit names, computations can become
complicated in the bottom-up models. To overcome this difficulty, the top-down models are
developed and adapted to the portfolio credit derivatives. This approach consists of describing
directly the cumulative loss process and its intensity dynamics by using point processes; see,
for example, Arnsdorff and Halperin [1], Cont and Minca [4], Filipović, Overbeck, and Schmidt
[11], Giesecke, Goldberg, and Ding [14], Sidenius, Piterbarg, and Andersen [18]. In particular,
the Hawkes process has been proposed recently to describe the default contagion such as in
Errais, Giesecke, and Goldberg [10] and Dassios and Zhao [6], where the default intensity may
depend on the default timings. Although marginal distributions of default times are relatively
neglected in the top-down models, this approach provides efficiently tractable and dynamic
models for credit portfolio analysis.
In this paper, we consider a family of ordered default times σ1 , . . . , σn as in the top-down
∗
Received by the editors October 3, 2013; accepted for publication (in revised form) November 21, 2014; published
electronically January 13, 2015. This work was partially supported by La Chaire Marchés en Mutation and NSFC
project 11201010.
http://www.siam.org/journals/sifin/6/93979.html
†
LPMA, Université Pierre et Marie Curie - Paris 6 and CMAP, Ecole Polytechnique, Paris, France (elkaroui@
cmapx.polytechnique.fr).
‡
Laboratoire de Mathématiques et Modélisation d’Évry (LaMME), Université d’Évry-Val-d’Essonne, UMR CNRS
8071, Evry, France (monique.jeanblanc@univ-evry.fr).
§
ISFA, Université Claude Bernard - Lyon 1, Lyon, France (ying.jiao@univ-lyon1.fr).
1
2
NICOLE EL KAROUI, MONIQUE JEANBLANC, AND YING JIAO
models. We study the credit dependence by using the density process instead of intensity.
The motivation is twofold. First, the density approach, which highlights what happens after a
default event, adapts naturally to the successive default scenarios {t < σ1 }, {σ1 ≤ t < σ2 }, . . . ,
{σn ≤ t}. The method focuses on analyzing the impact of each default event on the remaining
credit names and consists of generalizing in a recursive way the single default case in El Karoui,
Jeanblanc, and Jiao [8]. Second, we are interested in the role of information. We distinguish
between default-free information and default information, which have quite different natures,
and study the role of these two types of information on the credit contagion phenomenon. In
the context of multiple default times, the global market information is described by a filtration
G which is the enlargement of the default-free reference filtration F by adding progressively all
the default events. For purposes of pricing and risk management, it is relevant to consider the
global market information G. In the density approach, we suppose that the family of ordered
default times σ1 , . . . , σn admits a conditional density with respect to (w.r.t.) the reference
filtration F and deduce general computation results in the enlarged filtration G. The results
that we obtain show the interplay of the F-density and the past default times, which present
the roles of default-free and default information at the default contagion event.
In the literature and in practice, the intensity approach is widely used in credit risk
modeling. In the intensity approach, one focuses on the intensity process of the cumulative
loss, which is a jump process adapted to the global filtration G. The contagion phenomenon
is described by the size and the frequency of the jumps of the intensity process. In the density
approach, the key term is the joint density process. On the one hand, it is adapted to the
reference filtration F, which is often supposed to be a Brownian filtration, so the density can be
a continuous process. On the other hand, the joint density describes the dependence structure
of the default family and is a stochastic process depending on multiparameters. The impact
of each default, such as the contagious jump at default, can be calculated in an intrinsic form
using the density process. Compared to the intensity models in the top-down approach, there
exist links between density and intensity processes. The intensity process can be deduced
completely from the density process. But the inverse is not true in general. Only part of the
density can be obtained from the intensity process, which means that the density contains
more information. It was shown in [8] that the extra information contained in the density is
particularly useful for the after-default analysis. In the multidefault setting, we shall continue
to investigate this observation. In particular, we are interested in the immersion property,
which implies that any F-martingale is a G-martingale. Under this hypothesis, the density can
be deduced from the intensity. We note in addition that the intensity process deduced from
the density has a general form, which depends on the default timings and does not necessarily
satisfy the Markovian property.
The top-down models are often applied to the pricing of credit portfolio derivatives with
explicit intensity models proposed in the literature (see [2, 3, 4, 11, 14, 17]). In this paper, the
main focus is to present the density framework for ordered multiple defaults and analyze the
impact of defaults in a general setting. The implementation of large-sized credit derivative
pricing is not directly addressed. However, we present several explicit density models and show
through numerical illustrations how the survival probability and the price of credit-sensitive
assets can be affected by successive default events.
The paper is organized as follows. We present the density framework for successive defaults
DENSITY APPROACH IN MODELING SUCCESSIVE DEFAULTS
3
in section 2. Section 3 deals with the relationship of the density model with the cumulative loss
process and the classical intensity models in the top-down approach. In section 4, we discuss
the change of probability measure for the density. Section 5 is devoted to explicit modeling
examples, such as the dynamic copula model. We present our conclusions in section 6.
2. Default density framework. In this section, we present the density framework in credit
risk modeling. Let us fix a probability space (Ω, A, P) equipped with a reference filtration
F = (Ft )t≥0 satisfying the usual conditions and representing the “default-free” information.
Consider a family of random times τ = (τ1 , . . . , τn ) taking values in Rn+ and representing the
default times of n firms on the financial market. As in the top-down models, we consider
the cumulative loss process and hence are interested in the ordered set of default times. We
denote the increasing-ordered permutation of τ by σ = (σ1 , . . . , σn ), such that1
σ1 < σ2 < · · · < σn .
The idea is to work on the n successive sets {t < σ1 }, {σ1 ≤ t < σ2 }, . . . , {σn ≤ t} and
to update the conditional laws at the arrival of a default: one starts with the filtration F,
and, at the first default time σ1 , we enlarge F with that new knowledge to obtain G(1) .
Then we enlarge G(1) with the knowledge of the second default σ2 to obtain G(2) , and so
on. This progressively arriving information flow will have an impact on the pricing and the
risk management problems of the credit portfolio derivatives, which is the main focus of this
paper.
2.1. Reminder on single default. In this subsection, we recall some results in the case
of a single default (see [8, 9]). Let τ be a finite positive random time on the probability
space (Ω, A, P). We assume that there exists a family of nonnegative Ft ⊗ B(R+ )-measurable
functions (ω, u) → αt (ω, u) such that for any bounded Borel function f : R+ → R,
!
(1)
E[f (τ )|Ft ] =
f (u)αt (u)du ∀t ≥ 0, P-a.s.
R+
"∞
The F-conditional survival probability is given by2 P(τ > θ|Ft ) = θ αt (u)du for all t, θ ≥ 0.
Roughly speaking, αt (u)du = P(τ ∈ du|Ft ) and α(u) is the conditional density of τ given
the filtration F. In this approach, the study in the larger filtration can be done in two steps
by using the conditional density: before the default, i.e., on the set {t < τ }, and after the
default, on the set {t ≥ τ }. The before-default study is classical for the pricing of credit
derivatives. The contribution of the density approach is the after-default study, which allows
one to analyze the impact of a default event.
Let D = (Dt )t≥0 be the smallest right-continuous and complete filtration which makes
τ a stopping time. It gives the information about default occurrence. The global market
information G = (Gt )t≥0 is the smallest right-continuous and complete filtration such that Gt
1
In the density framework, the probability that two defaults occur at the same time is null. See section 2.2
for more details.
2
This equality is valid except on a negligible set which does not depend on t and θ. We often do not mention
this important fact.
4
NICOLE EL KAROUI, MONIQUE JEANBLANC, AND YING JIAO
contains Ft ∨ Dt . In what follows, we shall write, with an abuse of notation, F ∨ D for this
filtration (note that in a general setting F ∨ D fails to be right-continuous).
The pricing problems are related to the computation of G-conditional expectations. Consider a positive and FT ⊗ B(R+ )-measurable random variable YT (·), T denoting the maturity;
then, for any t ≤ T ,
$ %$
#"∞
#
E t YT (u)αT (u)du|Ft ]
E YT (θ)αT (θ)$Ft $$
(2) E[YT (τ )|Gt ] = 1{t<τ }
+ 1{τ ≤t}
$ , a.s.
P(τ > t|Ft )
αt (θ)
θ=τ
There are two parts in the above formula: the before-default one on the set {t < τ } and
the after-default one on the set {t ≥ τ }. The default timing τ has an impact on the after#
(θ) $$ %
default formula, described by E YT (θ) ααTt (θ)
Ft evaluated at θ = τ . The second term on the
right-hand side of (2) can also be written as
$
1{τ ≤t} E[YT (τ )|Gt ] = 1{τ ≤t} EPθ [YT (θ)|Ft ]$θ=τ ,
where Pθ is the probability measure defined on FT by3
$
dPθ $$
αT (θ)
=
.
$
dP FT
α0 (θ)
So the impact of a default event after its occurrence time τ can be interpreted as a change of
probability measure which depends on the density process.
Let µt denote the conditional law of τ given Gt ; then we have
αt (u)du
µt (du) = 1{t<τ } " ∞
+ 1{t≥τ } δτ (du),
t αt (u)du
where δ is the Dirac measure. The conditional expectation (2) can be written as
!
!
#
#
%
αT (u) %
E YT (u)
|Ft µt (du) =
EPu YT (u)|Ft µt (du).
E[YT (τ )|Gt ] =
αt (u)
R+
R+
The after-default analysis cannot be fully recovered by the classical intensity approach.
In particular, the density αt (θ) with t > θ, which plays an important role in the after-default
formula, cannot be recovered from the intensity in general. This observation shows that the
density approach is particularly adapted to the after-default study for the default impact and
contagion. More precisely, recall that the
" t G-intensity of τ (if it exists) is the nonnegative Gadapted process λG such that (11{τ ≤t} − 0 λG
s ds, t ≥ 0) is a G-martingale, and the F-intensity
" t∧τ
of τ is the nonnegative F-adapted process λF such that (11{τ ≤t} − 0 λFs ds, t ≥ 0) is a GF
martingale and therefore satisfies λFt 1{τ >t} = λG
t . The intensity λ can be completely deduced
from the density by
(3)
3
λFt =
αt (t)
αt (t)
= "∞
,
P(τ > t|Ft )
t αt (u)du
Note that α(θ) is an F-martingale.
t ≥ 0.
DENSITY APPROACH IN MODELING SUCCESSIVE DEFAULTS
5
From the intensity, using the martingale property of α(θ), we obtain part of the density by
(4)
F
αt (θ) = E[λG
θ |Ft ] = E[λθ 1{θ<τ } |Ft ],
t ≤ θ.
In classical intensity models such as the Cox model, one often assumes that the immersion
property holds between F and G, i.e., that F-martingales remain G-martingales. This condition, also called the H-hypothesis, is equivalent to P(τ > t|Ft ) = P(τ > t|F∞ ) for any t ≥ 0
and also equivalent to the after-default density satisfying
(5)
αt (θ) = αθ (θ),
t > θ.
Hence, under the immersion hypothesis, we obtain the whole density for all positive t and θ
from the intensity. Another important consequence of (5) is that the after-default conditional
expectation in (2) becomes
$ %
#
E[YT (τ )|Gt ]1
1{τ ≤t} = 1{τ ≤t} E YT (θ)$Ft θ=τ ,
which means that under the immersion hypothesis, only the default timing, and not the
conditional law of τ , is taken into account in the after-default computation.
2.2. Conditional density for ordered defaults. We consider now the ordered defaults
σ1 , . . . , σn and extend the density framework to the multidefault setting. As we have explained previously, the default information is revealed progressively and associated to the
successive default times. We first state the density hypothesis for the family of random times
σ = (σ1 , . . . , σn ) w.r.t. the reference filtration F, and then consider the increasingly enlarged
filtrations containing default information.
2.2.1. Density w.r.t. the reference filtration. Recall that F = (Ft )t≥0 is a reference
filtration on (Ω, A, P) representing the default-free information. We present the fundamental
hypothesis on the existence of the F-density of the ordered default times.
Hypothesis 2.1. The conditional distribution of σ = (σ1 , . . . , σn ) given F admits a density
with respect to the Lebesgue measure;4 i.e., there exists a family of nonnegative Ft ⊗ B(Rn+ )measurable functions (ω, u) → αt (u, ω), where u = (u1 , . . . , un ) ∈ Rn+ , such that for any
positive or bounded Borel function f : Rn+ → R,
!
(6)
E[f (σ)|Ft ] =
f (u)αt (u)du ∀t ≥ 0, P-a.s.,
Rn
+
where du denotes du1 · · · dun . We call the family α(u) the F-conditional density (or simply
the density when no ambiguity is possible) of σ.
In this paper, we always assume this hypothesis. The density hypothesis implies that
there are no simultaneous defaults; in other words, σi )= σj , a.s., if i )= j. By consequence, the
sequence {σ1 , . . . , σn } is almost surely strictly increasing and the density α(u) is null outside
the set {u1 < · · · < un }. For any fixed u ∈ Rn+ , the process (αt (u), t ≥ 0) is an F-martingale.
The joint conditional survival probability is given, for any θ = (θ1 , . . . , θn ) ∈ Rn+ , by
! ∞
! ∞
! ∞
P(σ > θ|Ft ) =
du1 · · ·
dun αt (u) =
αt (u)du,
θ1
4
θn
θ
This can be generalized to any nonnegative nonatomic measure, which is invariant by permutation.
6
NICOLE EL KAROUI, MONIQUE JEANBLANC, AND YING JIAO
where the notation σ > θ stands for σi > θi for all i ∈ {1, . . . , n}.
To study successively the default events, we are interested in the subfamily of the first k
(k)
defaults in the portfolio σ (k) := (σ1 , . . . , σk ), where k ≤ n. The marginal density αt (·) of
σ (k) w.r.t. Ft is obtained from the joint density of σ as a partial integral by
!
'
(k) &
(7)
αt u(k) =
αt (u)du(k+1:n) ,
Rn−k
+
where for any u we use the notation u(k:p) to denote the vector (uk , . . . , up ) and u(p) for u(1:p) .
Furthermore, u(i:i−1) and u(0) are null vectors.
2.2.2. Density w.r.t. the global filtration. For a single default, the global information
is the progressive enlargement of the reference filtration F by the default time. In the multidefault case, this global information contains the successive enlargements of filtrations by the
ordered defaults.
The default information arrives progressively with successive default events. For any i ∈
{1, . . . , n}, we denote by Di = (Dti )t≥0 the filtration associated with σi , which corresponds to
(i)
information concerning the ith ordered default. So the increasing filtrations D(i) = (Dt )t≥0 :=
D1 ∨ · · · ∨ Di represent the cumulative information flow of the first i defaults, notably, whether
the first i defaults have occurred, and the timings of the past default events. In other words,
at each default time, we update the information by adding the σ-algebra generated by σi .
(i)
We emphasize that D(i) coincides with D(n) stopped at the corresponding default, i.e., Dt =
(n)
Dt∧σi , t ≥ 0.
(n)
The global information G(n) = (Gt )t≥0 := F ∨ D(n) includes both default and default-free
(n)
information. Any Gt -measurable random variable X can be written in the form
X=
n
(
i=0
&
'
1{σi ≤t<σi+1 } Xti σ (i) ,
where Xti (·) is Ft ⊗ B(Ri+ )-measurable, with convention σ0 = 0, σn+1 = ∞, and Xt0 (σ(0) ) is
Ft -measurable.
(n)
(n)
If µt is the conditional law of the default times σ given the global information Gt , then
for any positive or bounded Borel function f : Rn+ → R+ ,
!
(n)
(n)
(8)
E[f (σ)|Gt ] =
f (u)µt (du).
Rn
+
By using the F-density process of σ, we obtain explicitly
(9)
(n)
µt (du)
=
n
(
αt (u)du(i+1:n)
1{σi ≤t<σi+1 } " ∞
δσ (i) (du(i) ),
t αt (u)du(i+1:n)
i=0
with δ denoting the Dirac measure and t = (t, . . . , t) the vector of n − i copies of t. Observe
(n)
that on each set {σi ≤ t < σi+1 }, the conditional law µt depends on the first i defaults σ (i)
which have already occurred.
DENSITY APPROACH IN MODELING SUCCESSIVE DEFAULTS
7
We now present a general pricing result in the multidefault setting, where YT (σ) is a
payoff function of maturity T .
Proposition 2.2. Let YT (·) be a positive FT ⊗ B(Rn+ )-measurable function on Ω × Rn+ ; then
for any t ≤ T ,
!
)
αT (u) * (n)
(n)
(10)
E[YT (σ)|Gt ] =
E YT (u)
|Ft µt (du)
α
(u)
t
Rn
+
or, equivalently,
(11)
(n)
E[YT (σ)|Gt ]
=
n
(
i=0
1{σi ≤t<σi+1 }
"∞
t
$
E[YT (u)αT (u)|Ft ]du(i+1:n) $
$
"∞
, a.s.
$
u(i) =σ (i)
t αt (u)du(i+1:n)
Proof. We proceed in a recursive way. We introduce the intermediate filtrations G(i) =
:= F ∨ D(i) , i ≤ n, and for convenience set G(0) = F. Indeed, the formula (2) adapts
naturally to the successive defaults; in particular, applying the before-default part of formula
(2), on the set {σi ≤ t < σi+1 }, to the subfamily of remaining defaults σ (i+1:n) = (σi+1 , . . . , σn )
and the corresponding filtration G(i) (as F in (2)) leads to
(i)
(Gt )t≥0
(n)
(12)
1{σi ≤t<σi+1 } E[YT (σ)|Gt ]
"∞
(i+1:n)|i
(i) $
E[ t YT (u)αT
(u(i+1:n) )du(i+1:n) |Gt ] $
$
= 1{σi ≤t<σi+1 }
,
$
(i)
P(σi+1 > t|Gt )
u(i) =σ(i)
where α(i+1:n)|i denotes the G(i) -density of σ (i+1:n) and is given, on the set {σi ≤ t < σi+1 },
by
(i+1:n)|i
(13)
αt
(u(i+1:n) ) =
αt (σ (i) , u(i+1:n) )
(i)
αt (σ (i) )
.
We then use the after-default part of (2) to the default subfamily σ (i) and the reference
filtration F to obtain, on the set {σi ≤ t < σi+1 },
+! ∞
,$
(i+1:n)|i
(i) $$
E
YT (u)αT
(u(i+1:n) )du(i+1:n) |Gt $
t
"∞
u(i) =σ (i)
$
(u(i+1:n) )du(i+1:n) |Ft ] $
$
=
$
(i)
αt (u(i) )
u(i) =σ (i)
"∞
$
E[ t YT (u)αT (u)du(i+1:n) |Ft ] $
$
=
.
$
(i)
αt (u(i) )
u(i) =σ (i)
(i)
E[αT (u(i) )
t
(i+1:n)|i
YT (u)αT
Moreover, the denominator in (12) is
P(σi+1 >
(i)
t|Gt )
= 1{σi >t} + 1{σi ≤t}
"∞
t
αt (σ (i) , u(i+1:n) )du(i+1:n)
(i)
αt (σ (i) )
.
8
NICOLE EL KAROUI, MONIQUE JEANBLANC, AND YING JIAO
This leads to (11). Finally, we obtain the equivalent equality (10) by using the conditional
(n)
law µt given by (9).
u$
αT (u)
$
Remark 2.3. If we introduce a change of probability measure by dP
dP FT = α0 (u) , then
"
(n)
(n)
(10) can be written as EP [YT (σ)|Gt ] = Rn EPu [YT (u)|Ft ] µt (du). The Radon–Nikodým
+
derivative of the change of probability plays an important role in the computation.
The default contagion effect is contained in our model through two aspects, as shown in
the previous proposition. The first one is that there is a regime switching in the dynamics
when each default occurs, which induces a contagious jump at default. The jump size depends
on the joint density α(u) and is computed in an intrinsic form. The second one is that the
conditional law of defaults given the global information depends explicitly on the past default
timings. This last observation is interesting. In the literature, the intensity changes after
the occurrence of default, taking into account the number of defaults, but in many models
does not keep in memory the timing of each past default (as is the case in Arnsdorff and
Halperin [1], Laurent, Cousin, and Fermanian [17], Herbertsson [15], etc.). This allows these
models to be Markovian, which appears to be convenient in some cases. Nevertheless, our
objective in this paper is to analyze the impact of past defaults so that we take into account
the timing of defaults.
In particular, we consider the marginal law of the kth default. The conditional survival
probability law of σk is given by
!
(n)
(n)
P(σk > T |Gt ) =
1{uk >T } µt (du)
Rn
+
(14)
=
!
∞
t
1{uk >T }
(n)
k−1
(
αt (u)du(i+1:n)
1{σi ≤t<σi+1 } " ∞
δσ(i) (du(i) ), T ≥ t.
t αt (u)du(i+1:n)
i=0
(k)
Note that P(σk > T |Gt ) = P(σk > T |Gt ).
More generally, we consider the joint law of the first k defaults σ (k) in the portfolio. By
(k)
(n)
(k)
the fact that Gt∧σk = Gt∧σk , the conditional laws of σ (k) , given the intermediary filtration Gt
(n)
(k)
and the global filtration Gt , coincide. So it suffices to study for σ (k) its Gt -conditional law,
"
(k)
(k)
(k)
which is denoted by µt and defined as E[f (σ (k) )|Gt ] = Rk f (u(k) )µt (du(k) ). We have,
+
similar to (9), the following formula:
(15)
(k)
µt (du(k) ) =
k−1
(
αt (u)du(i+1:n)
1{σi ≤t<σi+1 } " ∞
δσ(i) (du(i) ) + 1{σk ≤t} δσ(k) (du(k) ).
t αt (u)du(i+1:n)
i=0
3. Successive defaults and top-down models. In this section, we investigate the links between successive defaults and the loss-counting process in top-down models and, in particular,
the links between the density of σ and the loss intensity in the multidefault setting.
3.1. Default information—ordered defaults and loss-counting process. Recall that τ
is a family of random times and σ is the associated ordered sequence. The knowledge of the
DENSITY APPROACH IN MODELING SUCCESSIVE DEFAULTS
9
default counting process is given by
Nt :=
n
(
i=1
1{τi ≤t} ,
which can also be given by the ordered default times and equals Nt = ni=1 1{σi ≤t} . At a given
time t ≥ 0, the information generated by the random variable Nt , i.e., σ(Nt ), gives the number
of defaults up to time t; and the filtration DN = (DtN )t≥0 generated by the counting process
N , i.e., DtN = σ(Ns , s ≤ t), gives the number of past defaults together with their timings. In
addition, DN coincides with the information flow generated by the ordered default times, i.e.,
(n)
(i)
N
= Dt . Clearly, the global information GN = (GtN )t≥0 given
Dt = DtN , and satisfies Dt∧σ
i
as F ∨ DN coincides with G(n) .
A useful observation gives the link between the ordered defaults and the counting process
N : for any k = 0, 1, . . . , n − 1 and any t ≥ 0,
{Nt ≤ k} = {σk+1 > t}.
Using the marginal law of ordered defaults and the fact that GN and G(n) coincide, we have
the conditional loss distribution for t ≤ T ,
!
(k+1)
N
N
Pk (t, T ) := P(NT ≤ k|Gt ) = P(σk+1 > T |Gt ) =
1{uk+1 >T } µt
(du(k+1) ),
(16)
Rk+1
+
(k+1)
(k+1)
where µt
is the Gt
-conditional law of σ (k+1) given by (15). Obviously P(NT = k|GtN ) =
Pk (t, T ) − Pk−1 (t, T ). In the literature, the counting process N is often supposed to be
Markovian. This is not the case here. Note that the loss distribution (16) depends on the
number of defaults and the timing of each default.
For a collateralized debt obligation (CDO) tranche pricing, a standard hypothesis on
the market is the constant recovery rate R (equal to 40%" in practice) for all defaults. So
∞
LT = (1 − R)NT . Then using the equality (NT − K)+ = K 1{NT >u} du together with (16),
we can compute E[(NT − K)+ |GtN ], which is the key term for the CDO pricing.
3.2. Links with intensity approach. Most top-down models are based on
" t the intensity
approach. The loss intensity is the GN -adapted process λN such that (Nt − 0 λN
s ds, t ≥ 0)
is a GN -martingale. This quantity is often used in the top-down models to characterize the
loss distribution. In the following, we show that the loss intensity, which is equal to the sum
of all the ordered default intensities, can be computed from the density.
Recall"that the G(i) -intensity of σi is the positive G(i) -adapted process λi such that (Mti :=
t
1{σi ≤t} − 0 λis ds, t ≥ 0) is a G(i) -martingale.5 It is well known that M i is stopped at σi and
that the G(i) -intensity satisfies λit = 0 on {t ≥ σi }. The following lemma shows that the
G(i) -intensity of σi coincides with its GN -intensity.
Lemma 3.1. For i = 1, . . . , n, any G(i) -martingale stopped at σi is a GN -martingale.
5
Note that it is different from the Gi -intensity of σi .
10
NICOLE EL KAROUI, MONIQUE JEANBLANC, AND YING JIAO
Proof. We prove that any G(1) -martingale stopped at σ1 is a G(2) -martingale. The result
will follow. Let M be a G(1) -martingale stopped at σ1 , i.e., Mt = Mt∧σ1 for any t ≥ 0. For
s < t,
(1)
E[Mt∧σ1 1{σ2 >s} |Gs ]
(2)
E[Mt∧σ1 |Gs ] = 1{σ2 ≤s} Mσ1 + 1{σ2 >s}
.
(1)
P(σ2 > s|Gs )
Obviously, since σ1 < σ2 , one has
E[Mt∧σ1 1{σ2 >s} |Gs(1) ] = 1{σ1 >s} E[Mt∧σ1 |Gs(1) ] + 1{σ1 ≤s} E[Mσ1 1{σ2 >s} |Gs(1) ] .
The G(1) -martingale property of M yields
1{σ1 >s} E[Mt∧σ1 |Gs(1) ] = 1{σ1 >s} Ms∧σ1 .
Moreover,
1{σ1 ≤s} E[Mσ1 1{σ2 >s} |Gs(1) ] = 1{σ1 ≤s} Mσ1 P(σ2 > s|Gs(1) ).
(2)
Hence E[Mt∧σ1 |Gs ] = Ms∧σ1 . The result follows.
Proposition 3.2. The loss intensity is equal to the sum of G(i) -intensities of all ordered
defaults σi , i.e., for any t ≥ 0,
λN
t =
(17)
n
(
λit ,
a.s.,
i=1
where
(18)
λit
= 1{σi−1 ≤t<σi }
"∞
t" αt (u)du(i+1:n)
∞
t αt (u)du(i:n)
$
$
$
$u(i−1) =σ(i−1) , a.s.
ui =t
Remark 3.3. The intensity of σi is null outside the set {σi−1 ≤ t < σi } and depends on
the density αt (u) with t ≤ ui and on the past defaults σ (i−1) .
"t
Proof. Since (1
1{σi ≤t} − 0 λis ds, t ≥ 0) is a G(i) -martingale stopped at σi , it is, from Lemma
"t3.1, a GN -martingale; hence the sum (Nt − 0 ni=1 λis ds, t ≥ 0) is a GN -martingale. It follows
that λN = ni=1 λi . In order to prove (18), we use a recursive method with G(i) = Di ∨ G(i−1) .
As a consequence of (3),
i|i−1
αt
(t)
λit = 1{t<σi }
,
(i−1)
P(σi > t|Gt
)
where
(19)
(i−1)
P(σi > t|Gt
)=
!
∞
t
i|i−1
αt
(u)du.
i|i−1
We have that the G(i−1) -density of σi satisfies 1{t<σi−1 } αt
(t) = 0, and on the set {σi−1 ≤ t},
"∞
$
$
i|i−1
t αt (u)du(i+1:n) $
αt
(t) =
.
$
(i−1)
(i−1)
αt
(u(i−1) ) u(i−1)ui=σ
=t
DENSITY APPROACH IN MODELING SUCCESSIVE DEFAULTS
In addition
P(σi >
(i−1)
t|Gt
)
= 1{t<σi−1 } + 1{σi−1 ≤t}
11
"∞
$
αt (u)du(i:n) $
$
,
$
(i−1)
αt
(u(i−1) ) u(i−1) =σ(i−1)
t
so the result follows.
By the above proposition, we note that there exists a family of processes λi,F such that
"∞
$
$
i,F
t" αt (u)du(i+1:n) $
λt (u(i−1) ) =
∞
$
t αt (u)du(i:n) ui =t
(i)
is Ft ⊗ B(Ri−1
+ )-measurable and that the G -intensity of σi is given in the form
&
'
(20)
λit = 1{σi−1 ≤t<σi } λi,F
σ (i−1) .
t
&
'
Without loss of generality, we can suppose that λi,F
u(i−1) = 0 if u(i−1) is outside the
t
set {u1 < · · · < ui−1 } or if t < ui−1 or t > ui .
Explicit models of loss intensity have been proposed in the literature where λN is supposed to be a function of the loss N ; see, for example, Brigo, Pallavicini, and Torresetti [3],
Filipović, Overbeck, and Schmidt [11], and Sidenius, Piterbarg, and Andersen [18]. In Frey
and Backhaus [12], λN depends on an auxiliary Markov chain. In Arnsdorff and Halperin [1],
it depends on some contagion factors (but not on the default timings in these models). In
Errais, Giesecke, and Goldberg[10] and Dassios and Zhao [6], the loss intensity depends on
the timing of defaults using Hawkes processes. In the density approach, the key term is the
joint density process α(u); then the loss intensity process λN can be computed, and it will
depend on the joint law of defaults and the default timings by Proposition 3.2.
3.3. Ordered defaults and immersion hypothesis. In this subsection, we are interested
in the immersion property in the density framework for the ordered default times. For a family
of ordered defaults, the immersion hypothesis holds between all the successive filtrations, that
is, between G(i) and G(i+1) for all i = 0, . . . , n − 1 if and only if F is immersed in GN (see
Ehlers and Schönbucher [7]). We now characterize this property by using the density.
Proposition 3.4. The immersion property between F and GN is equivalent to the following
conditions: for any i = 1, . . . , n and any u ∈ Rn+ , u1 < · · · < un , the marginal density of σ (i)
satisfies
(21)
(i)
αt (u(i) ) = α(i)
ui (u(i) )
∀t > ui ,
where α(i) is given by (7).
Proof. The result holds for n = 1. We shall prove it for n = 2, and the general result
will follow by recurrence. In fact, it’s easy to verify that under the conditions (21), we have
1|0
1|0
2|1
2|1
αt (u) = αu (u) and αt (u) = αu (u) for t > u (the quantity αi+1|i is defined in (19)), and
these two equalities are equivalent to the immersion property between F and G(1) and between
G(1) and G(2) , respectively, and hence to the immersion property between F and G(2) .
The immersion property is often assumed in the intensity models in the literature. A
standard method to construct a family of ordered random times satisfying the immersion
12
NICOLE EL KAROUI, MONIQUE JEANBLANC, AND YING JIAO
property is to generalize the Cox model in the top-down model
setting. More precisely, let
"∞
λi be a family of positive processes of the form (20) such that 0 λis ds = +∞; then using a
recurrence procedure establishes that F is immersed in GN if
/
.
!
t
(22)
σi = inf
t≥0 :
σi−1
λis ds ≥ ηi
,
i = 1, . . . , n,
where ηi is a positive random variable independent of G(i−1) , and hence of η1 , . . . , ηi−1 . The
case where (η1 , . . . , ηn ) is a family of mutually independent uniexponential random variables
corresponds to the model described in [7].
The loss distribution Pk (t, T ), whose general form is given in (16), has a more familiar
expression under immersion. The following result generalizes a well-known result in the single
default case. Note that under immersion, the probability of having less than k defaults in the
portfolio depends only on the intensity of σk+1 or, equivalently, on the loss intensity restricted
to the set {σk ≤ t < σk+1 }.
Proposition 3.5. Under the immersion hypothesis between F and GN , the conditional loss
distribution is given by
+
0 ! T
1
,
&
'
(k)
k+1,F
(23)
Pk (t, T ) = 1{t<σk+1 } E exp −
λs
σ(k) ds |Gt
.
t
Proof. By the immersion hypothesis and a recursive argument,
Pk (t, T ) =
E[1
1{σk+1 >T } |GtN ]
k+1|k
=
(k+1)
E[1
1{σk+1 >T } |Gt
]
k+1|k
= 1{σk+1 >t}
E[ST
k+1|k
St
(k)
(k)
|Gt ]
,
where St
= P(σk+1 > t|Gt ). Since the immersion property holds between G(k) and
k+1|k
G(k+1) "by [7], applying a classical result in the single default case to σk+1 , we have St
=
t
exp(− 0 λk+1
(σ
)ds),
and
the
result
follows.
(k)
s
The following proposition gives the joint density of σ in terms of their marginal intensities.
In the density framework, the immersion property does not necessarily hold. The knowledge
of intensities cannot imply the whole family of the density unless the immersion property
holds. We note that in the following proposition formula (24) is true in general. However, the
equality αt (u) = αun (u) for all t > un is valid only under the immersion property.
Proposition 3.6. Under the immersion hypothesis between F and GN , the density is given
by
.
E[αun (u)|Ft ], 0 ≤ t ≤ un ,
αt (u) =
αun (u), t > un ,
where
(24)
αun (u) =
n
2
i=1
. !
&
'
λi,F
ui u(i−1) exp −
ui
ui−1
/
&
'
λi,F
s u(i−1) ds .
DENSITY APPROACH IN MODELING SUCCESSIVE DEFAULTS
13
Proof. The case where n = 1 holds, as recalled in (4) and (5). We shall prove the
proposition for n = 2, and the general result will follow. Considering σ2 , we apply (4) to σ2
and G(1) and obtain
,
+
3 ! u2
4
2|1
(1)
2,F
2,F
αt (u2 ) = E λu2 (σ1 ) exp −
.
λs (σ1 )ds |Gt
0
Identifying both sides of the equality on the set {t < σ1 } by (2) implies
+
3 ! u2
4 ,
! ∞
2,F
2,F
du1 αt (u1 , u2 ) = E 1{σ1 >t} λu2 (σ1 ) exp −
λs (σ1 )ds |Ft
t
0
+! ∞
3 ! u2
4 ,
1|0
2,F
2,F
=E
du1 αu2 (u1 )λu2 (u1 ) exp −
λs (u1 )ds |Ft .
t
0
1|0
1|0
Under immersion between F and G(1) , αu2 (u1 ) = αu1 (u1 ) = λ1,F
u1 exp(−
allows us to conclude the proof.
" u1
0
λ1,F
s ds), which
4. Change of probability measure. In this section, we study the change of probability
for the density family. On the one hand, the density is affected by a change of probability;
on the other hand, we can construct a density process by using the methodology of a change
of probability measure. Very often, hypotheses concerning default times are made under the
historical probability, and, for pricing purpose, one needs to work under some equivalent
martingale measure. Hence, it is important to understand the role of a change of probability.
4.1. Density under a change of probability. We begin with a probability space (Ω, A, P),
where the immersion property holds between F and G(n) and σ has the F-density α(u).
Let W be a (P, F)-Brownian motion and hence a (P, G(n) )-Brownian motion. We describe
the Radon–Nikodým derivative by using a general martingale process. Let Q be a positive
(P, G(n) )-martingale with expectation 1, solution of the SDE
5
6
n
(
dQt = Qt− Ψt dWt +
Φit dMti , Q0 = 1,
i=1
" t∧σ
&
'
(n) )-martingales of
where (Mti = 1{σi ≤t} − 0 i λi,F
s σ (i−1) ds, t ≥ 0), i = 1, . . . , n, are (P, G
i
(n)
pure jump, Ψ and
processes which& can 'be written in
&
' G -predictable
-nΦ are square-integrable
i,k
i
the form Ψt = i=0 1{σi <t≤σi+1 } ψt σ (i) and Φit = i−1
1
σ(k) with φi,k >
k=0 {σk <t≤σk+1 } φt
−1. Then the process Q can be written in the form
Qt =
n
(
i=0
&
'
1{σi ≤t<σi+1 } qti σ (i) ,
where for all i = 0, 1, . . . , n − 1
3! t
4
!
! t
&
' i &
'
&
'
''2
&
' i+1,F &
'
1 t & i&
i
i
i+1,i
ψs u(i) dWs −
ψ u
ds−
φs
u(i) λs
u(i) ds ,
qt u(i) = qui u(i) exp
2 ui s (i)
ui
ui
t > ui ,
14
and
NICOLE EL KAROUI, MONIQUE JEANBLANC, AND YING JIAO
& '
& '
qtn u = qunn u exp
with initial values
q00 = 1
and
3!
t
& '
1
ψsn u dWs −
2
un
!
t
un
&
4
& ''2
ψsn u ds , t > un ,
&
'
&
'&
&
''
qui i u(i) = qui−1
u(i−1) 1 + φi,i−1
u(i−1) , i = 1, . . . , n.
ui
i
Since the immersion property holds under the probability P, the density α(u) of σ satisfies
(21) and, in particular, αt (u) = αun (u) if t > un . We now consider a new probability measure
Q defined by
dQ
(n)
= Qt on Gt .
dP
Then the density of σ under Q is given by
)
& ' *
1F E qun (u)αun u |Ft , t ≤ un ,
n
Qt
(25)
αQ
t (u) =
1F q n (u)αu (u), t > un ,
n
t
Q
t
where QF is the restriction of Q on F, i.e., QFt := E[Qt |Ft ]. We observe that after the change
of probability, the immersion property no longer holds.
An example concerns the successive Cox model where σ is constructed as in (22). In this
case, the immersion property holds between F and G(n) and the density αt (u) of σ under P is
given by Proposition 3.6. Then choosing carefully the term qunn (u) and computing (25) allows
us to obtain the density αQ (u) of σ under a new probability measure Q.
4.2. Dynamic copula. The default dependence structure can be described by a change of
probability. We can construct the conditional density process in a dynamic way by starting
from the unconditional law of σ. This gives a dynamic copula viewpoint: the idea is to diffuse
the initial dependence structure of defaults and appeal to the change of probability measure.
We begin with a probability measure P where σ is independent of the filtration F and
admits a probability density function"α0 : Rn+ → R+ . Then the conditional survival probability
∞
satisfies P(σ > θ|Ft ) = P(σ > θ) = θ α0 (u)du. The density function α0 (u) can be modeled
by using a copula model and represents the initial dependence between the default times σ.
To describe the dynamic correlation structure, we introduce a new probability measure. Let
(βt (u), t ≥ 0) be a family of" nonnegative (P, F)-martingales with β0 (u) = 1 for all u ∈ Rn+ .
For example, let βt (u) = E( Z(u)dW )t , where E denotes the Doléans–Dade exponential and
"t
Z(u) is an F-adapted process such that the Novikov condition EP [exp( 0 12 |Zs (u)|2 ds)] < ∞
is satisfied. Due to the assumed independence, (βt (σ), t ≥ 0) is a P-martingale w.r.t. the
filtration Gσ = F ∨ σ(σ) and defines a probability measure Q by
$
dQ $$
(26)
= βt (σ).
dP $G σ
t
From the Bayes formula, the density of σ under Q is given by
(27)
αQ
t (u) =
1
mβt
βt (u)α0 (u),
DENSITY APPROACH IN MODELING SUCCESSIVE DEFAULTS
15
"∞
where mβt := EP [βt (σ)|Ft ] = 0 βt (u)α0 (u)du. Since β0 (u) = 1, Q(σ > θ) = P(σ > θ), so
the unconditional law of σ is the same under the two probabilities.
The dynamic dependence under the new probability Q is introduced through the change of
probability measure using the normalized (Q, F)-martingale βt (u)
β . The normalization factor
mt
mβt introduces a nonlinear dependence of αQ
t (u) with respect to the initial density.
We can construct a sequence of successive defaults σ = (σ1 , . . . , σn ) with a given density
αt (u) by using the method of change of probability. We start from a family of random times
σ on (Ω, A, P) which is independent of F, so the (P, F)-density α(u) coincides with its initial
value α0 (u). Define the probability measure Q on (Ω, Gσ ) by
dQ $$
αt (σ)
.
σ =
dP Gt
α0 (σ)
Then σ admits αt (u) as the conditional density under the new probability measure Q by (27).
5. Modeling of density process. The joint density process plays an essential role in the
density approach. In this section, we show several explicit examples of the density process
for ordered default times. We also present a link between the ordered and nonordered default
times. The individual default information can be used to construct a joint density process for
nonordered defaults. Then using order statistics allows us to obtain the density for ordered
defaults.
5.1. Nonordered defaults and order statistics. Let us consider the family of nonordered
default times τ = (τ1 , . . . , τn ). We assume that the F-density of τ exists and is denoted by
γ(·) such that for any bounded Borel function f : Rn+ → R,
E[f (τ )|Ft ] =
!
Rn
+
f (θ)γt (θ)dθ,
t ≥ 0.
The ordered defaults σ is the increasing permutation of τ . There exists an explicit relationship between γ(·) and the density α(·) of σ by using the order statistics. For any u ∈ Rn+
such that u1 < · · · < un and any t ≥ 0,
(28)
αt (u1 , . . . , un ) = 1{u1 <···<un }
(
Π
&
'
γt uΠ(1) , . . . , uΠ(n) ,
where (Π(1), . . . , Π(n)) is a permutation of (1, . . . , n). The individual default information can
be incorporated into the density of ordered defaults by using equality (28). In particular, if
d
τ is exchangeable (see, e.g., Frey and McNeil [13]), that is, if (τ1 , . . . , τn ) = (τΠ(1) , . . . , τΠ(n) )
d
for any permutation where = signifies the equality in distribution, then
αt (u1 , . . . , un ) = 1{u1 <···<un } n! γt (u1 , . . . , un ).
This implies that all subfamilies of τ with the same cardinal have the same distribution. In
other words, the portfolio is homogeneous.
16
NICOLE EL KAROUI, MONIQUE JEANBLANC, AND YING JIAO
5.2. Several explicit examples. In this subsection, we give several explicit examples for
the F-conditional survival probability Gt (θ) := P(τ > θ|Ft ) of nonordered defaults, from
which we can deduce the density γ(θ).
The following example is a backward one based on the Cox process model. The correlation
structure is fixed for the final time by a copula function, and Gt (θ) is obtained by taking
conditional expectation. By choosing different copula functions, we obtain a large family of
joint densities.
Example 5.1. Let τi , i ∈ {1, . . . , n}, be defined as in the Cox process model in Lando [16].
That is, τi = inf{t ≥ 0 : Φit ≥ ξi }, where Φi is an F-adapted increasing process satisfying
Φi0 = 0 and limt→∞ Φit = +∞, and ξi is an A-measurable random variable of exponential law
with parameter 1 and is independent of F∞ . In this model, the marginal survival process
i
is given by Git = P(τi > t|Ft ) = e−Φt = P(τi > t|F∞ ). Let the correlation of defaults be
represented by a copula function C : Rn+ → R+ such that P(τ > θ|F∞ ) = C(G1θ1 , . . . , Gnθn ).
Then
#
%
Gt (θ) = E C(G1θ1 , . . . , Gnθn )|Ft .
The Gaussian copula model is the standard market model for the CDO pricing, where the
correlation between defaults is described by a standard Gaussian random variable representing
the common market factor. We now generalize the Gaussian copula model in a dynamic way.
In the following, the first example is a backward one where the factor is a Cox–Ingersoll–Ross
(CIR) process and the second one is a forward constructive model (see also Crépey, Jeanblanc,
and Wu [5]).
Example 5.2. Consider a family of processes X = (X 1 , . . . , X n ), where X i = Y 0 + Y i
(i = 1, . . . , n) is a fundamental process of the ith firm depending on two factors: the process
Y 0 can be interpreted as a common factor of the market, and Y i is the individual factor of
each firm where Y i , i = 0, 1, . . . , n, are independent CIR processes
:
dYti = κi (µi − Yti )dt + σi Yti dBti , Y0i > 0, i = 0, 1, . . . , n.
We assume moreover that 2κi µi > σi2 so that Y i does not vanish. Let the filtration F be
generated by the multidimensional Brownian motion B = (B 0 , B 1 , . . . , B n ). Let T ≥ 0 be
a terminal time. We define the conditional survival probability for 0 ≤ t < T and θ =
(θ1 , . . . , θn ) ∈ Rn+ by
Gt (θ) = P(τ > θ|Ft ) = E[e−θ·XT |Ft ] = E[e−
!n
i
i=0 θi YT
|Ft ],
where θ0 = θ1 + · · · + θn . Then classical results on affine processes yield
5 n
6
n
(
(
i
Gt (θ) = exp −
ϕi (T − t, θi )Yt −
ψi (T − t, θi ) ,
i=0
i=0
with ϕi and ψi being functions R+ × R+ → R given explicitly by
3
4
2κi v
2κi µi
(2κi + σi2 v)eκi s − σi2 v
ϕi (s, v) =
, ψi (s, v) =
ln
− κi s .
2κi
(2κi + σi2 v)eκi s − σi2 v
σi2
DENSITY APPROACH IN MODELING SUCCESSIVE DEFAULTS
17
The correlation between default times is characterized by the process Y 0 . The case Y 0 = 0
provides an example where the default times are independent. Moreover, given the process
Y 0 , the default times satisfy the standard conditional independence condition.
In particular, for a homogeneous portfolio, κi = κ, µi = µ, and σi = σ for i = 0, . . . , n. So
the functions satisfy ϕi = ϕ and ψi = ψ and
5 n
6
n
(
(
ϕ(T − t, θi )Yti −
ψ(T − t, θi ) .
Gt (θ) = exp −
i=0
i=0
Example 5.3. Let hi be a family of increasing functions mapping R+ into R, letB = (B i , i =
1, . . . , n) be an n-dimensional standard Brownian motion, and let Y be a random variable
independent of F. We set
3:
4
! ∞
−1
i
2
τi = (hi )
1 − ρi
fi (s)dBs + ρi Y
0
for ρi ∈ (−1, 1) and fi a family of deterministic square-integrable functions. An immediate
extension of the Gaussian model leads to
5
5
66
n
2
1
h
(θ
)
−
ρ
Y
i i
i
P(τ > θ|Ft ∨ σ(Y )) =
Φ
mit − :
,
σi (t)
2
1−ρ
i=1
where mit =
"t
0
fi (s)dBsi and σi2 (t) =
i
"∞
fi2 (s)ds. It follows that
5
5
66
! ∞2
n
1
h
(θ
)
−
ρ
y
i
i
i
P(τ > θ|Ft ) =
Φ
mit − :
fY (y)dy,
σi (t)
−∞
1 − ρ2
i=1
t
i
where fY denotes the probability density function of Y . Note that, in this setting, the random
times τ are conditionally independent given the factor Y , similar to the standard Gaussian
copula model. In the particular case t = 0, choosing fi so that σi (0) = 1, and Y with a
standard Gaussian law, we obtain
5
6
! ∞2
n
hi (θi ) − ρi y
Φ − :
ϕ(y)dy,
P (τ i > θ) =
−∞ i=1
1 − ρ2i
:
which corresponds, by construction, to the standard Gaussian copula (hi (τi ) = 1 − ρ2i Xi +
ρi Y , where Xi , Y are independent standard Gaussian variables).
Relaxing the independence condition on the components of the process B leads to more
sophisticated examples.
5.3. Numerical illustrations. In this subsection, we present a simple numerical example
to illustrate quantitatively the impact of successive defaults on the survival probability of
remaining credit names and the role of a change of probability measure. We consider a family
of nonordered random times τ = (τ1 , . . . , τn ) and its ordered permutation σ = (σ1 , . . . , σn ).
18
NICOLE EL KAROUI, MONIQUE JEANBLANC, AND YING JIAO
We suppose that τ1 , . . . , τn are correlated by a Gumbel copula, which is suitable to characterize
heavy tail dependence and is often used for insurance portfolios. More precisely, the joint
& & -n
' '
ξ 1/ξ with λ > 0 and
survival survival probability is given by P(τ > θ) = exp −
i
i=1 (λi θi )
ξ ≥ 1. In this model, each default time τi follows the exponential law with intensity λi , and the
default correlation is characterized by the constant parameter ξ. The case ξ = 1 corresponds to
the independent case (which, however, does not imply the independence between σ1 , . . . , σn ),
and a larger value of ξ implies a stronger correlation between the credit names.
We suppose that under the initial probability P, the default times are independent of the
reference filtration F. So the F-density of σ is a deterministic function and the immersion
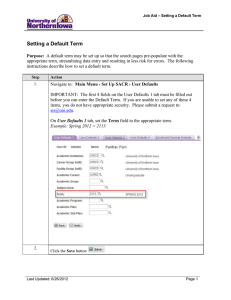
property is satisfied under P. In the following numerical tests, we let n = 3, T = 1 and let
the intensity parameters be λ1 = 0.1, λ2 = 0.2, λ3 = 0.3. Figure 1 plots a simulation of the
(3)
conditional survival probability of the third default P(σ3 > T |Gt ) given in (14) as a function
of time t for different values of the correlation parameter ξ. In this scenario, the first two
defaults σ1 and σ2 occur before T . We observe that the survival probability of σ3 is decreasing
w.r.t. ξ. Before the first default, all three curves are increasing with time. At each default
time, there is a negative jump in the survival probability of the third one σ3 , and the jump
size is increasing w.r.t. the correlation.
1.02
1
0.98
survival probability
0.96
0.94
0.92
0.9
ξ=1
ξ=1.1
0.88
ξ=1.2
0.86
0
0.1
0.2
0.3
0.4
0.5
time t
0.6
0.7
0.8
0.9
1
(3)
Figure 1. Conditional survival probability P(σ3 > T |Gt ).
Consider a change of probability
&
-as in subsection
-4.2 and let the'Radon–Nikodým density in
(26) be given as βt (u) = exp − ( ni=1 ui )Mt − 12 ( ni=1 ui )2 ,M -t , where (Mt := exp(σWt −
1 2
2 σ t), t ≥ 0) is a positive (P, F)-martingale, W being a (P, F)-Brownian motion. We will
compare the survival probability under the two probability measures. In Figure 2, we plot the
(3)
survival probability Q(σ3 > T |Gt ) under the new probability measure Q. The parameters
are the same as in the previous test, and we let the volatility parameter be equal to 0.3.
We observe that with the same scenario of default times σ1 and σ2 , the survival conditional
probability of σ3 has similar behaviors under the two probability measures. However, the
value of the survival probability is perturbed by the change of probability.
DENSITY APPROACH IN MODELING SUCCESSIVE DEFAULTS
19
1.02
1
0.98
survival probability
0.96
0.94
0.92
0.9
ξ=1
ξ=1.1
0.88
ξ=1.2
0.86
0
0.1
0.2
0.3
0.4
0.5
time t
0.6
0.7
0.8
0.9
1
(3)
Figure 2. Conditional survival probability Q(σ3 > T |Gt ).
1
0.9
bond price
0.8
0.7
0.6
ξ=1
0.5
ξ=1.1
ξ=1.2
0.4
0
0.1
0.2
0.3
0.4
0.5
time t
0.6
0.7
0.8
0.9
1
Figure 3. Value of the defaultable bond.
In the third test, we consider a defaultable zero-coupon bond which is written on the last
default σ3 and will be activated only if the first default σ1 occurs before the maturity T . We
suppose that Q is a risk-neutral pricing probability measure (with the same parameters as
in Figure 2) and that the interest rate is zero. Figure 3 plots the value of this bond at time
t in a scenario where both σ1 and σ2 occur before the maturity T and σ3 is larger than T .
Because of the constraint on σ1 , the bond price is low before the first default. When the first
default occurs, the bond becomes a standard defaultable bond on σ3 and the price jumps to
a high value. At the second default time σ2 , we observe a contagious phenomenon and the
bond price has a negative jump.
20
NICOLE EL KAROUI, MONIQUE JEANBLANC, AND YING JIAO
6. Conclusion and perspective. In this paper, we present the density framework to study
ordered default times. We assume that the family of ordered defaults admits a joint density
w.r.t. the reference filtration and apply the before-default and after-default analysis to successive default scenarios. The main contribution of this approach is to study in detail the
impact of each default event on the remaining credit names such as the regime change and
the contagious jump at each default. In addition, we distinguish the roles of reference information and default information, and the default timings are explicitly included in the results
obtained. The density approach provides flexible choices on default correlation structure. In
particular, the immersion property hypothesis, which is often assumed in intensity models, is
not necessary in the density approach.
Besides the theoretical results, the perspective of the density approach consists of developing explicit and tractable density models such that the pricing formulas can be implemented
numerically for credit portfolio derivatives, and in particular for the CDOs.
Acknowledgment. We are grateful to the associate editor and the two anonymous referees
for their valuable suggestions and remarks.
REFERENCES
[1] M. Arnsdorff and I. Halperin, BSLP: Markovian bivariate spread-loss model for portfolio credit
derivatives, J. Comput. Finance, 12 (2008), pp. 77–107.
[2] T.R. Bielecki, S. Crépey, and M. Jeanblanc, Up and down credit risk, Quant. Finance, 10 (2010),
pp. 1137–1151.
[3] D. Brigo, A. Pallavicini, and R. Torresetti, Calibration of CDO tranches with the dynamical
Generalized-Poisson loss model, Risk Magazine, 20 (2007), pp. 70–75.
[4] R. Cont and A. Minca, Recovering portfolio default intensities implied by CDO quotes, Math. Finance,
23 (2013), pp. 94–121.
[5] S. Crépey, M. Jeanblanc, and D. L. Wu, Informationally dynamized Gaussian copula, Int. J. Theor.
Appl. Finance, 16 (2013), 1350008.
[6] A. Dassios and H. Zhao, A dynamic contagion process, Adv. in Appl. Probab., 43 (2011), pp. 814–846.
[7] P. Ehlers and P. Schönbucher, Background filtrations and canonical loss processes for top-down
models of portfolio credit risk, Finance Stoch., 13 (2009), pp. 79–103.
[8] N. El Karoui, M. Jeanblanc, and Y. Jiao, What happens after the default: The conditional density
approach, Stochastic Process. Appl., 120 (2010), pp. 1011–1032.
[9] N. El Karoui, M. Jeanblanc, Y. Jiao, and B. Zargari, Conditional default probability and density,
in Inspired by Finance: The Musiela Festschrift, Y. Kabanov, M. Rutkowski, and T. Zariphopoulou,
eds., Springer, 2014, pp. 201–219.
[10] E. Errais, K. Giesecke, and L. R. Goldberg, Affine point processes and portfolio credit risk, SIAM
J. Financial Math., 1 (2010), pp. 642–665.
[11] D. Filipović, L. Overbeck, and T. Schmidt, Dynamic CDO term structure modelling, Math. Finance,
21 (2009), pp. 53–71.
[12] R. Frey and J. Backhaus, Dynamic hedging of synthetic CDO tranches with spread and contagion risk,
J. Econom. Dynam. Control, 34 (2010), pp. 710–724.
[13] R. Frey and A. McNeil, Dependent defaults in models of portfolio credit risk, J. Risk, 6 (2003), pp.
59–92.
[14] K. Giesecke, L. R. Goldberg, and X. Ding, A top-down approach to multi-name credit, Oper. Res.,
59 (2011), pp. 283–300.
[15] A. Herbertsson, Modelling default contagion using multivariate phase-type distributions, Rev. Derivatives Res., 14 (2011), pp. 1–36.
DENSITY APPROACH IN MODELING SUCCESSIVE DEFAULTS
21
[16] D. Lando, On Cox processes and credit risky securities, Rev. Derivatives Res., 2 (1998), pp. 99–120.
[17] J.-P. Laurent, A. Cousin, and J.-D. Fermanian, Hedging default risks of CDOs in Markovian contagion model, Quant. Finance, 11 (2011), pp. 1773–1791.
[18] J. Sidenius, V. Piterbarg, and L. Andersen, A new framework for dynamic credit portfolio loss
modelling, Int. J. Theor. Appl. Finance, 11 (2008), pp. 163–197.