a general unified approach to modelling switching
advertisement

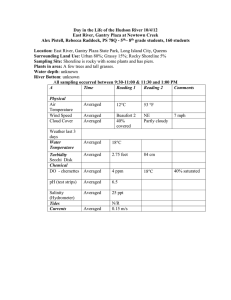
A GENERAL UNIFIED APPROACH TO MODELLING SWITCHING-CONVERTER POWER STAGES RD.MIDDLEBROOK AND SLOBODAN ABSTRACT A method f o r modelling switching-converter power s t a g e s i s developed, whose s t a r t i n g p o i n t i s t h e u n i f i e d s t a t e - s p a c e r e p r e s e n t a t i o n of t h e switched networks and whose end r e s u l t i s e i t h e r a complete s t a t e - s p a c e d e s c r i p t i o n o r i t s e q u i v a l e n t small-signal low-frequency l i n e a r c i r c u i t model. A new c a n o n i c a l c i r c u i t model i s proposed, whose f i x e d topology c o n t a i n s a l l t h e e s s e n t i a l i n p u t - o u t p u t and c o n t r o l p r o p e r t i e s of any dc-todc s w i t c h i n g c o n v e r t e r , r e g a r d l e s s of i t s d e t a i l e d c o n f i g u r a t i o n , and by which d i f f e r e n t c o n v e r t e r s can be c h a r a c t e r i z e d i n t h e form of a t a b l e conv e n i e n t l y s t o r e d i n a computer d a t a bank t o prov i d e a u s e f u l t o o l f o r computer a i d e d d e s i g n and o p t i m i z a t i o n . The new c a n o n i c a l c i r c u i t model p r e d i c t s t h a t , i n genera1,switching a c t i o n i n t r o duces both z e r o s and p o l e s i n t o t h e d u t y r a t i o t o o u t p u t t r a n s f e r f u n c t i o n i n a d d i t i o n t o t h o s e from t h e e f f e c t i v e f i l t e r network. 1. INTRODUCTION 1.1 B r i e f Review of E x i s t i n g Modelling Techniques I n modelling of s w i t c h i n g c o n v e r t e r s i n g e n e r a l , and power s t a g e s i n p a r t i c u l a r , two main approaches one based on s t a t e - s p a c e modelling and t h e o t h e r u s i n g an a v e r a g i n g technique have been developed e x t e n s i v e l y , but t h e r e h a s been l i t t l e c o r r e l a t i o n between them. The f i r s t approach remains s t r i c t l y i n t h e domain of e q u a t i o n m a n i p u l a t i o n s , and hence r e l i e s h e a v i l y on numerical methods and computerized Implementationa. Its primary advantage i s i n t h e u n i f i e d d e s c r i p t i o n of a l l Pover s t a g e s r e g a r d l e s s of t h e t y p e (buck. b o o s t . buck-boost o r any o t h e r v a r i a t i o n ) through u t i l i z a t i o n of t h e e x a c t s t a t e - s p a c e e q u a t i o n s of t h e two switched models. -On t h e o t h e r hand, P r o c e s e i n g Systems .'I - - @ 1976 IEEE. * - 10, 1976, CUK based on e q u i v a l e n t c i r c u i t m a n i p u l a t i o n s , resulting i n a single equivalent l i n e a r c i r c u i t model of t h e p a r e r s t a g e . T h i s h a s t h e d i s t i n c t advantage of p r o v i d i n g t h e c i r c u i t d e s i g n e r w i t h p h y s i c a l i n s i g h t i n t o t h e behaviour of t h e o r i g i n a l switched c i r c u i t , and of a l l o w i n g t h e powerful t o o l s of l i n e a r c i r c u i t a n a l y s i s and s y n t h e s i s t o be used t o t h e f u l l e s t e x t e n t i n design of r e g u l a t o r s i n c o r p o r a t i n g s w i t c h i n g converters. 1.2 Proposed New State-Space Averaging Approach The method proposed i n t h i s paper bri-dges t h e gap e a r l i e r c o n s i d e r e d t o e x i s t between t h e s t a t e space t e c h n i q u e and t h e a v e r a g i n g t e c h n i q u e of modelling power s t a g e s by i n t r o d u c t i o n of s t a t e space averaged modelling. At t h e same time i t o f f e r s t h e advantages of both e x i s t i n g methods t h e g e n e r a l u n i f i e d t r e a t m e n t of t h e s t a t e - s p a c e approach, a s w e l l a s an e q u i v a l e n t l i n e a r c i r c u i t model a s i t s f i n a l r e s u l t . Furthermore, it makes c e r t a i n g e n e r a l i z a t i o n s p o s s i b l e , which o t h e r w i s e could n o t be achieved. The proposed s t a t e - s p a c e a v e r a g i n g method, o u t l i n e d i n t h e Flowchart of F i g . 1, a l l o w s a u n i f i e d t r e a t m e n t of a l a r g e v a r i e t y of power s t a g e s c u r r e n t l y used, s i n c e t h e a v e r a g i n g s t e p i n t h e s t a t e - s p a c e domain i s v e r y simple and c l e a r l y d e f i n e d (compare b l o c k s l a and 2 a ) . I t merely c o n s i s t s of a v e r a g i n g t h e two e x a c t s t a t e - s p a c e d e s c r i p t i o n s of t h e switched models over a s i n g l e c y c l e T, where f s = 1 / T i s t h e s w i t c h i n g frequency ( b l o c k 2 a ) . Hence t h e r e i s no need f o r s p e c i a l "know-howf' i n massaging t h e two switched c i r c u i t models i n t o t o p o l o g i c a l l y e q u i v a l e n t forms i n o r d e r t o a p p l y c i r c u i t - o r i e n t e d procedure d i r e c t l y , a s r e q u i r e d i n [ l ] (block l c ) . N e v e r t h e l e s s , through a hybrid modelling technique (block 2c), t h e c i r c u i t s t r u c t u r e of t h e averaged c i r c u i t model ( b l o c k 2b) can be r e a d i l y recognized from t h e averaged s t a t e - s p a c e model ( b l o c k 2 a ) . Hence a l l t h e b e n e f i t s of t h e p r e v i o u s a v e r a g i n g t e c h n i q u e a r e r e t a i n e d . Even though t h i s outI n e i t h e r c a s e , a p e r t u r b a t i o n and l i n e a r i z a t i o n Reprinted, vith permission, f r w Proceedings of the IEEE Pwer E l e c t r ~ n i c sSpecialists Conference, J~~~ Cleveland, OH. stolc - spore C~YO~IO~S rlrody slotc ldct modd d - o:d, d ' ~ ' - 2 , x - x + ; , y. ~ +, v,-Lj.i i ax+dv,-o - x - - ~ - h v , ;r-C? dynom,c ioc ~ m o / / s 1 9 ~m/ 1o t / . F i g . 1, Flowchart of averaged modelling approaches process required t o include the duty r a t i o modulation e f f e c t proceeds i n a v e r y s t r a i g h t f o r ward and formal manner, t h u s emphasizing t h e corner-stone c h a r a c t e r of b l o c k s 2a and 2b. At t h i s s t a g e (block 2a o r 2b) t h e s t e a d y - s t a t e (dc) and l i n e t o o u t p u t t r a n s f e r f u n c t i o n s a r e a l r e a d y a v a i l a b l e , a s i n d i c a t e d by b l o c k s 6a and 6b respectively, while the duty r a t i o t o output transfer function is available a t the final-stage model (4a o r 4b) a s i n d i c a t e d by b l o c k s 7a and 7b. The two f i n a l s t a g e models (4a and 4b) then g i v e t h e complete d e s c r i p t i o n of t h e s w i t c h i n g c o n v e r t e r by i n c l u s i o n of b o t h independent cont r o l s , t h e l i n e v o l t a g e v a r i a t i o n and t h e d u t y r a t i o modulation. Even though t h e c i r c u i t t r a n s f o r m a t i o n p a t h b might be p r e f e r r e d from t h e p r a c t i c a l d e s i g n standpoint, the state-space averaging path a is i n v a l u a b l e i n r e a c h i n g some g e n e r a l c o n c l u s i o n s about t h e s m a l l - s i g n a l low-frequency models of any dc-to-dc s w i t c h i n g c o n v e r t e r (even t h o s e y e t t o be i n v e n t e d ) . Whereas, f o r p a t h b , one has t o be prekented w i t h t h e p a r t i c u l a r c i r c u i t i n o r d e r t o proceed w i t h modelling, f o r p a t h a t h e f i n a l s t a t e - s p a c e averaged e q u a t i o n s (block 48) g i v e t h e complete model d e s c r i p t i o n through g e n e r a l m a t r i c e s A1, A2 and v e c t o r s bl, b2' c T, and c2T of t h e two s t a r t i n g switched models ( h o c k l a ) . T h i s i s a l s o why a l o n g p a t h b i n t h e Flowchart a p a r t i c u l a r example of a boost power s t a g e w i t h p a r a s i t i c e f f e c t s was chosen, w h i l e a l o n g p a t h a g e n e r a l e q u a t i o n s have been retained. S p e c i f i c a l l y , f o r t h e b o o s t power b. T h i s example w i l l be l a t e r s t a g e bl = b2 pursued i n d e t a i l a l o n g both p a t h s . - I n addition t h e state-space averaging approach o f f e r s a c l e a r i n s i g h t i n t o t h e q u a n t i t a t i v e n a t u r e of t h e b a s i c a v e r a g i n g approximation, which becomes b e t t e r t h e f u r t h e r t h e e f f e c t i v e low-pass f i l t e r c o r n e r frequency f is below t h e s w i t c h i n g frequency f,, t h a t i s , f z / f s << 1. T h i s i s , however, shown t o be e q u i v a l e n t t o t h e requirement f o r s m a l l o u t p u t v o l t a g e r i p p l e , and hence does n o t pose any s e r i o u s r e s t r i c t i o n o r l i m i t a t i o n on modelling of prac r i c a l dc-to-dc c o n v e r t e r s . F i n a l l y , t h e s t a t e - s p a c e a v e r a g i n g approach s e r v e s a s a b a s i s f o r d e r i v a t i o n of a u s e f u l g e n e r a l c i r c u i t model t h a t d e s c r i b e s t h e i n p u t o u t p u t and c o n t r o l p r o p e r t i e s of any dc-to-dc converter. 1.3 New Canonical C i r c u i t Model The c u l m i n a t i o n of any of t h e s e d e r i v a tions along e i t h e r path a o r path b i n t h e Flowchart of F i g . 1 i s an e q u i v a l e n t c i r c u i t (block 5) , v a l i d f o r s m a l l - s i g n a l low-f requency v a r i a t i o n s superimposed upon a dc o p e r a t i n g p o i n t , t h a t r e p r e s e n t s t h e two t r a n s f e r f u n c t i o n s of i n t e r e s t f o r a s w i t c h i n g c o n v e r t e r . These .re t h e l i n e v o l t a g e t o o u t p u t and d u t y r a t i o to o u t p u t t r a n s f e r f u n c t i o n s . The e q u i v a l e n t c i r c u i t i s a c a n o n i c a l model t h a t c o n t a i n s t h e e s s e n t i a l p r o p e r t i e s of dc-to-dc s w i t c h i n g c o n v e r t e r , r e g a r d l e s s of t h e A s seen i n b l o c k 5 f o r detailed configuration. the general c a s e , t h e model i n c l u d e s a n i d e a l transformer t h a t d e s c r i b e s t h e b a s i c d c - t e d c t r a n s f o r m a t i o n r a t i o from l i n e t o o u t p u t ; a low-pass f i l t e r whose element v a l u e s depend upon t h e dc d u t y r a t i o ; and a v o l t a g e and a c u r r e n t g e n e r a t o r p r o p o r t i o n a l t o t h e d u t y r a t i o modulation input. The c a n o n i c a l model i n b l o c k 5 of t h e Flowc h a r t can be o b t a i n e d f o l l o w i n g e i t h e r p a t h a o r p a t h b , namely from b l o c k 4a o r 4b, a s w i l l be &own l a t e r . However, f o l l o w i n g t h e g e n e r a l d e s c r i p t i o n of t h e f i n a l averaged model i n b l o c k ha, c e r t a i n g e n e r a l i z a t i o n s about t h e c a n o n i c a l model a r e made p o s s i b l e , which a r e o t h e r w i s e n o t a c h i e v a b l e . Namely, even though f o r a l l c u r r e n t l y known s w i t c h i n g dc-to-dc c o n v e r t e r s (such a s t h e buck, b o o s t , buck-boost, Venable 1 3 1 , Weinberg [ 4 ] and a number of o t h e r s ) t h e frequency dependence appears o n l y i n t h e d u t y - r a t i o dependent v o l t a g e g e n e r a t o r b u t n o t i n t h e c u r r e n t g e n e r a t o r , and thein ~nbs,a@,a,fkaLs.f d e ~ L . ~ i , r l ~ l e ~ z c r _ o ~ . . e o I ~ ionm i a l p o l e s of t h e e f f e c t i v e f i l t e r network which essentially c o n s t i t u t e t h e l i n e voltage t o output t r a n s f e r f u n c t i o n . Moreover, i n g e n e r a l , both d u t y - r a t i o dependent g e n e r a t o r s , v o l t a g e and c u r r e n t , a r e frequency dependent ( a d d i t i o n a l z e r o s and p o l e s ) . That i n t h e p a r t i c u l a r c a s e s of t h e b o o s t o r buck-boost c o n v e r t e r s t h i s dependence reduces t o a f i r s t o r d e r polynomial r e s u l t s from t h e f a c t t h a t - t h e o r d e r of t h e system which i s involved i n t h e s w i t c h i n g a c t i o n i s o n l y two. Hence from t h e g e n e r a l r e s u l t , t h e o r d e r of t h e Polynomial i s a t most o n e , though i t could r e d u c e t o a pure c o n s t a n t , a s i n t h e buck o r t h e Venable converter [3]. The s i g n i f i c a n c e o f t h e new c i r c u i t model i s t h a t any s w i t c h i n g dc-to-dc c o n v e r t e r can be reduced t o t h i s c a n o n i c a l f i x e d topology form, a t l e a s t a s f a r a s i t s i n p u t - o u t p u t and c o n t r o l a;nt"y";;;f; 5-7 i;-g;;,;j, ;~;;er~f~~c:'iv:a for elements depend on d u t y r a t i o D ) , and t h e c o n f i - g u r a t i o n chosen which o p t i m i z e s t h e s i z e and weight. Also, comparison of t h e frequency dependence of t h e two d u t y - r a t i o dependent g e n e r a t o r s p r o v i d e s i n s i g h t i n t o t h e q u e s t i o n of s t a b i l i t y once a r e g u l a t o r feedback loop i s c l o s e d . 1.4 Extension t o Complete Regulator Treatment F i n a l l y , a l l t h e r e s u l t s obtained i n modelling t h e c o n v e r t e r o r , more a c c u r a t e l y , t h e network which e f f e c t i v e l y t a k e s p a r t i n s w i t c h i n g a c t i o n , can e a s i l y be i n c o r p o r a t e d i n t o more complicated systems c o n t a i n i n g dc-to-dc c o n v e r t e r s . For example, by m o d e l l i n g t h e modulator s t a g e a l o n g t h e same l i n e s , one can o b t a i n a l i n e a r c i r c u i t model of a closed-loop s w i t c h i n g r e g u l a t o r . Standard l i n e a r feedback theory ran t h e n be used f o r both a n a l y s i s and s y n t h e s i s , s t a b i l i t y c o n s i d e r a t i o n s , and p r o p e r d e s i g n of feedback compensating n e t works f o r m u l t i p l e loop a s w e l l a s s i n g l e - l o o p regulator configurations. 2. STATE-SPACE AVERAGING In t h i s s e c t i o n t h e state-space averaging method i s developed f i r s t i n g e n e r a l f o r any dcto-dc s w i t c h i n g c o n v e r t e r , and t h e n demonstrated i n d e t a i l f o r t h e p a r t i c u l a r c a s e of t h e b o o s t power s t a g e i n which p a r a s i t i c e f f e c t s ( e s r of t h e c a p a c i t o r and s e r i e s r e s i s t a n c e of t h e i n ductor) a r e included. General equations f o r b o t h s t e a d y - s t a t e ( d c ) and dynamic performance ( a c ) a r e o b t a i n e d , from which i m p o r t a n t t r a n s f e r f u n c t i o n s a r e d e r i v e d and a l s o a p p l i e d t o t h e s p e c i a l c a s e of t h e b o o s t power s t a g e . s w i t c h i n g between two l i n e a r networks c o n s i s t i n g of i d e a l l y l o s s l e s s s t o r a g e e l e m e n t s , i n d u c t a n c e s and c a p a c i t a n c e s . I n p r a c t i c e , t h i s f u n c t i o n may be o b t a i n e d by use of t r a n s i s t o r s and d i o d e s which o p e r a t e a s synchronous s w i t c h e s . On t h e assumption t h a t t h e c i r c u i t o p e r a t e s i n t h e soc a l l e d "continuous conduction" mode i n which t h e i n s t a n t a n e o u s i n d u c t o r c u r r e n t does n o t f a l l t o z e r o a t any p o i n t i n t h e c y c l e , t h e r e a r e o n l y two d i f f e r e n t " s t a t e s " of t h e c i r c u i t . Each s t a t e , however, can be r e p r e s e n t e d by a l i n e a r c i r c u i t model ( a s shown i n b l o c k l b of F i g . 1 ) o r by a c o r r e s p o n d i n g s e t of s t a t e - s p a c e e q u a t i o n s ( b l o c k l a ) . Even though any s e t of l i n e a r l y independent v a r i a b l e s can be chosen a s t h e s t a t e v a r i a b l e s , i t i s customary and c o n v e n i e n t i n e l e c t r i c a l networks t o a d o p t t h e i n d u c t o r c u r r e n t s and capac i t o r v o l t a g e s . The t o t a l number of s t o r a g e elements t h u s d e t e r m i n e s t h e o r d e r of t h e system. k e , E , , ~ s , " d , ~:~,~h,,B,,:h,~,i,c,~ e : f LaLve_c,to,E e q u a t i o n s f o r t h e two switched models: (i) i n t e r v a l Td : (11) interval Td': where Td denotes t h e i n t e r v a l when t h e switch i s i n t h e on s t a t e a n d T ( l - d ) 5 ~ d i' s t h e i n t e r v a l f o r which i t i s i n t h e o f f s t a t e , as shown i n Fig. 2 . The s t a t i c equations y l = clTx and y = c2Tx are necessary i n order t o account f o r t i e case when t h e output q u a n t i t y does not s w ~ t c hdrive k 1 Td off Td' 7 4r- Fig. 2. D e f i n i t i o n o f t h e two switched i n t e r v a l s Td and Td' . coincide w i t h any o f t h e s t a t e v a r i a b l e s , but i s rather a c e r t a i n l i n e a r combination o f t h e state variable$. Our o b j e c t i v e now i s t o replace t h e s t a t e space d e s c r i p t i o n o f t h e two l i n e a r c i r c u i t s emanating from t h e two successive phases o f t h e switching c y c l e T by a s i n g l e state-space desc r i p t i o n which represents approximately t h e behaviour o f t h e c i r c u i t across t h e whole period T . We t h e r e f o r e propose t h e following simple averaging s t e p : t a k e t h e average o f b o t h dynamic and s t a t i c equations f o r t h e two switched i n t e r v a l s ( I ) , by summing t h e equations f o r i n t e r v a l Td m u l t i p l i e d by d and t h e equations f o r i n t e r v a l Td' m u l t i p l i e d by d ' . The following l i n e a r continuous system r e s u l t s : A f t e r rearranging ( 2 ) i n t o t h e standard l i n e a r continuous system state-space d e s c r i p t i o n , we o b t a i n t h e b a s i c averaged state-space descript i o n (over a s i n g l e period T ) : T h i s model i s t h e b a s i c averaged model which i s the s t a r t i n g model f o r a l l o t h e r d e r i v a t i o n s ( b o t h state-space and c i r c u i t o r i e n t e d ) . Note t h a t i n t h e above equations t h e d u t y r a t i o d i s considered c o n s t a n t ; i t i s n o t a time dependent v a r i a b l e ( y e t ) , and p a r t i c u l a r l y not a switched discontinuous v a r i a b l e which changes between 0 and 1 as i n [ l ]and [ 2 ] , but i s merely a f i x e d number f o r each c y c l e . This i s e v i d e n t from t h e model d e r i v a t i o n i n Appendix A. In p a r t i c u l a r , when d = 1 ( s w i t c h c o n s t a n t l y on) t h e averaged model ( 3 ) reduces t o switched and when d = 0 ( s w i t c h o f f ) i t model ( 1 1 ) , reduces t o switched model ( 1 1 1 ) . In e s s e n c e , comparison between ( 3 ) and ( 1 ) shows t h a t t h e system matrix o f t h e averaged model i s obtained by taking t h e average o f two switched model matrices A and A2, i t s c o n t r o l i s t h e average o f two c o n t r o l v e c t o r s bl and b 2 , and i t s output i s t h e average o f two outputs yl and y over a period T . 2 The j u s t i f i c a t i o n and t h e nature o f the approximation i n s u b s t i t u t i o n f o r t h e two switched models o f ( 1 ) by averaged model ( 3 ) i s indicated i n Appendix A and given i n more d e t a i l i n [b]. The b a s i c approximation made, however, i s t h a t o f approximation o f t h e fundamental matrix eAt = I + At by i t s f i r s t - o r d e r l i n e a r term. T h i s i s , i n turn,shown i n Appendix B t o be t h e same approximation necessary t o o b t a i n t h e dc c o n d i t i o n independent o f t h e storage element v a l u e s (L,C) and dependent on t h e dc d u t y r a t i o o n l y . I t a l s o coincides w i t h t h e requirement f o r low output v o l t a g e r i p p l e , which i s shown i n Appendix C t o be e q u i v a l e n t t o f c / f << 1 , namely t h e e f f e c t i v e f i l t e r corner frequency much lower than t h e switching frequency. + The model represented by ( 3 ) is an averaged model over a s i n g l e period T . I f we now assume t h a t t h e d u t y r a t i o d i s constant from c y c l e t o c y c l e , namely, d = D ( s t e a d y s t a t e dc duty r a t i o ) , we g e t : where Since ( 4 ) i s a l i n e a r system, superposition holds and i t can be p e r t ~ r b e d by i n t r o d u c t i o n o f l i n e v o l t a g e v a r i a t i o n s v as v = V + C , where V i s t h e dc l i n e i n p u t v 8 1 t a g e f cauging 8 c8rrespo:ding perturbation i n t h e s t a t e v e c t o r x = X + X , where !gain X i s t h e dc value o f t h e s t a t e v e c t o r and x t h e superFposed ac perturb a t i o n . S i m i l a r l y , y = Y + y , and Separation o f the steady-state ( d c ) part from the dynamic ( a c ) part then r e s u l t s i n t h e steady s t a t e ( d c ) model dc term ac term ac term nonlinear term The perturbed state-space d e s c r i p t i o n i s nonlinear owing t o t h e presence o f the_ prodyct o f the two time dependent q u a n t i t i e s x and d . and t h e dynamic ( a c ) model 2.3 I t i s i n t e r e s t i n g t o note t h a t i n ( 7 ) t h e steady s t a t e ( d c ) v e c t o r X w i l l i n general only depend on the dc duty r a t i o D and r e s i s t a n c e s i n t h e o r i g i n a l model, but not on t h e storage element values ( L ' s and C ' s ) . T h i s i s so because X i s t h e s o l u t i o n o f t h e l i n e a r system o f equations i n which L ' s and C's are proportionality cons t a n t s . T h i s i s i n complete agreement w i t h t h e f i r s t - o r d e r approximation o f t h e exact dc conditions shown i n Appendix B , which coincides w i t h expression ( 7 ) . Linearization and Final State-Space Averaged Model Let us now make t h e small-signal approximat i o n , namely t h a t departures from t h e steady s t a t e values are n e g l i g i b l e compared t o t h e steady s t a t e values themselves: Then, using approximations ( 1 2 ) we n e g l e c t a l l nonlinear terms such as t h e second-order terms i n ( 1 1 ) and obtain once again a line_ar system, but including duty-ratio modulation d . A f t e r separ a t i n g steady-state ( d c ) and dynamic ( a c ) parts o f t h i s linearized system we a r r i v e a t t h e following r e s u l t s for t h e f i n a l state-space averaged model. Steady-state ( d c ) model: From t h e dynamic ( a c ) model, t h e l i n e voltage t o state-vector t r a n s f e r functions can be e a s i l y derived a s : Dynamic (ac small-signal) model: Hence a t t h i s stage both steady-state ( d c ) and l i n e t r a n s f e r functions are a v a i l a b l e , as shown by block 6a i n t h e Flowchart o f F i g . 1 . We now undertake t o include t h e duty r a t i o modulation e f f e c t i n t o t h e basic averaged model ( 3 ) . 2.2 Perturbation Suppose now t h a t the duty r a t i o changes from where D cycle t o c y c l e , t h a t i s , d ( t ) = D + i_s the steady-state ( d c ) duty r a t i o as b e f o r e and d i s a superimposed ( a c ) v a r i a t i o n . With t h e c o r r e s ~ o n d i n aperturbatipn d e f i n i t i o n x = X + x , dc term line duty r a t i o v a r i a t i o n variation a A nonlinear second-order term In these r e s u l t s , A, b and c by ( 5 ) . T are given as b e f o r e Equations ( 1 3 ) and ( 1 4 ) represent t h e smallsignal low-frequency model o f any N o - s t a t e switching dc-to-dc converter working i n t h e continuous conduction mode. I t i s important t o note t h a t by n e g l e c t o f t h e nonlinear term i n ( 1 1 ) t h e source o f harmonics i s e f f e c t i v e l y removed. T h e r e f o r e , t h e l i n e a r description ( 1 4 ) i s a c t u a l l y a l i n e a r i z e d describing function r e s u l t t h a t i s the l i m i t o f t h e d e s ~ r i b i n g ~ f u n c t i o2s n t h e amplitude o f t h e input signals v e andlor d becomes vanishingly explained i n [ I ] , 121, or la]' i n h i c h smailsignal assumption ( 1 2 ) i s preserved. Very good agreement up t o close t o h a l f t h e switching frequency has been demonstrated repeatedly (111, [21, 131, 171). 2.4 Example: i n which I i s t h e d c i n d u c t o r c u r r e n t , V i s t h e d c c a p a c i t o r v o l t a g e , and Y i s t h e d c o u t p u t voltage Dynamic ( a c s m a l l s i g n a l ) model: Boost Power S t a g e w i t h P a r a s i t i c s . We now i l l u s t r a t e t h e method f o r t h e b o o s t power s t a g e shown i n F i g . 3. F i g . 3. Example f o r t h e s t a t e - s p a c e averaged modelling: b o o s t power s t a g e w i t h paras i t i c ~i n c l u d e d . i n which R' 2 (1-D) R + R~ + D(~-D)(R~~~R;. We now l o o k more c l o s e l y a t t h e d c v o l t a g e transformation r a t i o i n (17): Fig. 4. Two switched c i r c u i t models of t h e c i r c u i t i n P i g . 3 w i t h assumption of i d e a l s w i t c h e s . A l l elements i n t h e f i n a l s t a t e s p a c e averaged mode4 (13) and (14) a r e from a ) f o r i n t e r v a l obtained: A b , c Td, and ~ ~ , b i : ~ kb) f o r i n t e r v a l Td' hom With assumption of i d e a l s w i t c h e s , t h e two switched models a r e a s shown i n Fig. 4. For c h o i c e of s t a t e - s p a c e v e c t o r xT = ( 1 v ) , t h e s t a t e s p a c e e q u a t i o n s become: .--I where v Y V V _ r - = - . 1 (1-D) 2R 1-D ( I - D ) ~ R + R p + D(1-D) (Rc W L T ideal correction factor dc gain /b) (19) T h i s shows t h a t t h e i d e a l d c v o l t a g e g a i n i s 1 / D ' when a l l p a r a s i t i c s a r e z e r o (R = 0 , Rc = 0) and t h a t i n t h e i r p r e s e n c e i t i s s l f g h t l y reduced by a c o r r e c t i o n f a c t o r l e s s t h a n 1. Also we o b s e r v e ..L-.. ------- --- .I . - a.. ---- /u d i s c o n t i n u i t y of o u t p u t v o l t a g e was n o t in?iu$.&$+L i n [Z], b u t was c o r r e c t l y accounted f o r i n 111. From t h e dynamic model (18) one can f i n d t h e d u t y r a t i o t o o u t p u t and l i n e v o l t a g e t o o u t p u t t r a n s f e r f u n c t i o n s , which a g r e e e x a c t l y w i t h t h o s e o b t a i n e d i n [ l ] by f o l l o w i n g a d i f f e r e n t method of averaged model d e r i v a t i o n based on t h e e q u i v a l e n c e of c i r c u i t t o p o l o g i e s of two s w i t c h e d networks. Note t h a t (15) i s t h e s p e c i a l c a s e of (1) i n which bl = b2 = b = [ I / L b]T. Using (16) and (5) i n t h e g e n e r a l r e s u l t (13) and ( 1 4 ) , we o b t a i n t h e f o l l o w i n g f i n a l s t a t e - s p a c e averaged model. S t e a d y - s t a t e (dc) model: The fundamental r e s u l t o f t h i s s e c t i o n i s t h e development of t h e g e n e r a l s t a t e - s p a c e averaged model r e p r e s e n t e d by (13) and ( 1 4 ) , which can be e a s i l y used t o f i n d t h e s m a l l - s i g n a l low-frequency model of any s w i t c h i n g dc-to-dc c o n v e r t e r . T h i s was demonstrated f o r a b o o s t power s t a g e w i t h p a r a s i t i c s r e s u l t i n g i n t h e averaged model (17) and ( 1 8 ) . I t i s i m p o r t a n t t o emphasize t h a t , unlike the t r a n s f e r function description, the s t a t e - s p a c e d e s c r i p t i o n (13) and a 4 ) g i v e s t h e complete system behaviour. T h i s i s v e r y u s e f u l i n implementing two-loop and multi-loop feedback when two o r more s t a t e s a r e used-in a feedback p a t h t o modulate t h e d u t y r a t i o d. For example. both o u t p u t v o l t a g e and i n d u c t o r c u r r e n t may be r e t u r n e d i n a feedback l o o p . 3. HYBRID MODELLING In t h i s s e c t i o n it w i l l be shown t h a t f o r any s p e c i f i c converter a u s e f u l c i r c u i t r e a l i z a t i o n o f t h e b a s i c averaged model given by ( 3 ) can always be found. Then, i n t h e following s e c t i o n , t h e perturbation and l i n e a r i z a t i o n s t e p s w i l l be carried out on t h e c i r c u i t model f i n a l l y t o a r r i v e a t t h e c i r c u i t model equivalent o f ( 1 3 ) and (14) + Fig. 5. The c i r c u i t r e a l i z a t i o n w i l l be demonstrated f o r t h e same boost power stage example,for which t h e b a s i c state-space averaged model ( 3 ) becomes: Circuit realization o f the basic statespace averaged model ( 2 0 ) through hybrid modelling. d': I Fig. 6 . In order t o "connect" t h e c i r c u i t , we express t h e capacitor v o l t a g e v i n terms o f t h e desired output q u a n t i t y y a s : R+Rc v = y R - Basic c i r c u i t averaged model f o r t h e boost c i r c u i t example i n F i g . 3 . Both dcto-dc conversion and l i n e v a r i a t i o n are modelled when d(t)-D. As b e f o r e , we f i n d t h a t t h e c i r c u i t model i n Fig. 6 reduces f o r d = 1 t o switched model i n F i g . 4 a , and f o r d = 0 t o switched model i n F i g . 4b. In both cases t h e a d d i t i o n a l r e s i s t a n c e R = 1 dd' ( R R) disappears, as it should. II (1-d)Rci I f t h e duty r a t i o i s constant so d = D , t h e dc regime can be found e a s i l y by considering inductance L t o be short and capacitance C t o be open f o r d c , and t h e transformer t o have a D ' : l r a t i o . Hence t h e dc v o l t a g e gain ( 1 9 ) can be d i r e c t l y seen from F i g . 6 . S i m i l a r l y , a l l l i n e t r a n s f e r f u n c t i o n s corresponding t o ( 1 0 ) can be e a s i l y found from Fig. 6 . o r , i n m a t r i x form From ( 2 2 ) one can e a s i l y reconstruct t h e c i r c u i t r e p r e s e n t a t i o n shown i n F i g . 5 . I t i s i n t e r e s t i n g now t o compare t h i s i d e a l d ' : l transformer w i t h the usual ac transformer. While i n t h e l a t t e r t h e t u r n s r a t i o i s f i x e d , t h e one employed i n our model has a dynamic t u r n s r a t i o d ' : l which changes when t h e d u t y r a t i o i s a funcI t i s through t h i s i d e a l tion o f time, d ( t ) transformer t h a t t h e actual c o n t r o l l i n g f u n c t i o n i s achieved when t h e feedback loop i s c l o s e d . I n a d d i t i o n t h e i d e a l transformer has a dc t r a n s formation r a t i o d ' : l , while a r e a l transformer works f o r ac s i g n a l s o n l y . N e v e r t h e l e s s , t h e concept o f t h e i d e a l transformer i n Fig. 6 w i t h such properties i s a very u s e f u l o n e , s i n c e a f t e r a l l t h e switching converter has t h e o v e r a l l property o f a dc-to-dc transformer whose t u r n s r a t i o can be dynamically adjusted b y d u t y r a t i o modulation t o achieve t h e c o n t r o l l i n g f u n c t i o n . We w i l l , however, see i n t h e n e x t s e c t i o n how t h i s can be more e x p l i c i t l y modelled i n terms o f d u t y - r a t i o dependent generators o n l y . The b a s i c model ( 2 2 ) i s v a l i d f o r t h e dc regime, and t h e two dependent generators can be modeled as an i d e a l d ' : l transformer whose range extends down t o d c , as shown i n F i g . 6 . Following t h e procedure o u t l i n e d i n t h i s s e c t i o n one can e a s i l y o b t a i n t h e b a s i c averaged c i r c u i t models o f t h r e e common converter power stages,as shown i n t h e summary o f Fig. 7 . S u b s t i t u t i o n o f ( 2 1 ) i n t o ( 2 0 ) gives . ideal (a) buck 4.1 Steqe : power Perturbation -- - I f t h e averaged model i n F i g . 7b i s perturbed v +G iA-I+$, d m-a, according t o v g d' ,v ~ 4 , the~ nonlinear ~ model i n F i g . 8 results. D'-a, (b) boost Power staar : (c) buck boost power buck boost s F i g . 8. R 4.2 Fig. 7 . Summary o f b a s i c c i r c u i t averaged models f o r t h r e e common power stages: buck, b o o s t , and buck-boost. The two switched c i r c u i t state-space models f o r t h e power stages i n Fig. 7 are such t h a t t h e general equations ( 1 ) reduce t o t h e s p e c i a l cases A1 A2 A, bl # b2 = 0 ( z e r o v e c t o r ) f o r t h e b2 = b f o r t h e buck parer s t a g e , and A1 # A2, b boost power s t a g e , whereas f o r t h e buck-boost power stage A A2 and bl # b2 = 0 so t h a t t h e general case 3s retained. - - + 4. H'Y+~ - CIRCUIT AVERAGING Perturbation o f t h e b a s i c averaged c i r c u i t model i n F i g . 6 includes t h e duty r a t i o modulation e f f e c t 2, but r e s u l t s i n t h i s nonlinear c i r c u i t model. Linearization Under t h e small-signal approximation ( 1 2 ) , t h e following l i n e a r approximations are obtained: and t h e f i n a l averaged c i r c u i t model o f F i g . 9 results. In t h i s c i r c u i t model we have f i n a l l y obtained t h e c o n t r o l l i n g f u n c t i o n separated i n terms o f duty r a t i o dependent generators e, and j , , while t h e transformer t u r n s r a t i o i s dependent on t h e dc duty r a t i o D o n l y . The c i r c u i t model obtained i n F i g . 9 i s equivalent t o the state-space d e s c r i p t i o n given by ( 1 7 ) and ( 1 8 ) . a As indicated i n t h e Introduction,in t h i s section t h e a l t e r n a t i v e path b i n t h e Flowchart o f F i g . 1 w i l l be followed, and equivalence w i t h t h e previously developed path a f i r m l y established. The f i n a l c i r c u i t averaged model f o r t h e same example o f t h e boost power stage w i l l be arrived a t , which i s equivalent t o i t s corresponding state-space deacription given by (17) and (18) . The averaged c i r c u i t models shown i n ' F i g . 7 could have been obtained as i n [ 2 ] by d i r e c t l y averaging t h e corresponding components o f t h e two switched models. However, even f o r some simple cases such as t h e buck-boost or tapped inductor boost [ l ]t h i s presents some d i f f i c u l t y owing t o t h e requirement o f having two switched c i r c u i t models t o p o l o g i c a l l y e q u i v a l e n t , while t h e r e i s no such requirement i n t h e outlined procedure. In t h i s s e c t i o n we proceed with t h e perturbat i o n and l i n e a r i z a t i o n steps applied t o t h e c i r c u i t model, continuing w i t h t h e boost power stage as an example i n order t o include e x p l i c i t l y t h e duty r a t i o modulation e f f e c t . Fig. 9. Under model final stage 5. small-signal assumption (121, the i n F i g . 8 i s l i n e a r i z e d and t h i s averaged c i r c u i t model o f t h e boost i n F i g . 3 i s obtained. THE CANONICAL CIRCUIT MODEL Even though t h e general f i n a l state-space averaged model i n ( 1 3 ) and ( 1 4 ) gives t h e complete d e s c r i p t i o n o f t h e system behaviour, one might s t i l l wish t o derive a c i r c u i t model describing i t s input-output and c o n t r o l properties as i l l u s t r a t e d i n F i g . 10. (a) state - space i n p u t output bas is and a l s o a "modulation" resistance t h a t a r i s e s from a modulation o f t h e svitching t r a n s i s t o r storage time 111. ' 0 '5.1 -7G control F i g . 10. control D e f i n i t i o n o f the modelling o b j e c t i v e : c i r c u i t averaged model describing inputoutput and control properties. Derivation o f t h e Canonical Model through State-Space From t h e general state-space averaged model (13) and ( 1 4 ) , we obtain d i r e c t l y using the Laplace transform: In going from t h e model o f F i g . 10a t o t h a t o f F i g . l o b some information about the internal behaviour o f some o f the s t a t e s w i l l c e r t a i n l y be l o s b b u t , on t h e other hand, important advantages w i l l be gained as were b r i e f l y outlined i n the Introduction, and as t h i s section w i l l i l l u s t r a t e . We propose t h e following fixed topology c i r c u i t model, shown i n F i g . 11, as a r e a l i z a t i o n control f u ~ t i o n basic dc-to-dc transforrrration via d effective low-pass f I lter network Now, from t h e complete s e t o f t r a n s f e r functions we single out those which describe t h e converter input-output properties, namely ,. A i n which t h e G's are known e x p l i c i t l y i n terms o f t h e matrix and vector elements i n ( 2 3 ) . F i g . 11. Canonical c i r c u i t model r e a l i z a t i o n o f t h e "black box" i n F i g . l o b , modelling t h e three e s s e n t i a l functions o f any dc-to-dc converter: control, basic dc conversion, and l w - p a s s f i l t e r i n g . o f t h e "black box" i n F i g . l o b . We c a l l t h i s model the canonical c i r c u i t model, because any switching converter input-output model, regardless o f i t s detailed configuration, could be represented i n t h i s form. D i f f e r e n t converters are represented simply by an appropriate s e t o f formulas for t h e four elements e ( s ) , j ( s ) , p . He(s) i n t h e general equivalent c i r c u i t . The polarity o f the i d e a l p:1 transformer i s determined by.whether or not t h e power stage i s polarity inverting. I t s t u r n s r a t i o p i s dependent on t h e dc duty r a t i o D , and since f o r modelling purposes the transformer i s assumed t o operate down t o dc, it provides t h e basic dc-to-dc l e v e l conversion. The single-sect i o n low-pass LeC f i l t e r i s shown i n F i g . 11 only f o r i l l u s t r a t i o n purposes, because t h e actual number and configuration o f t h e L's and C's i n t h e e f f e c t i v e f i l t e r t r a n s f e r function r e a l i z a t i o n depends on t h e number o f storage elements i n t h e original converter. The resistance Re i s included i n the model o f F i g . 11 t o represent t h e damping properties o f t h e e f f e c t i v e low-pass f i l t e r . I t i s an " e f f e c t i v e " resistance t h a t accounts for various s e r i e s ohmic resistances i n t h e actual c i r c u i t (such a s RE i n t h e boost c i r c u i t example), t h e additional "switching" resistances due t o d i s continuity o f t h e output voltage (such as Rl = DD'(R R) i n t h e boost c i r c u i t example), 11 Equations (24) are analogous t o the two-port network representation o f the terminal properties o f the n:twork (output voltage y ( s ) and input current i ( s ) ) . The subscripts designate t h e corresponding t r a n s f e r funstions. For example , Gv i s t h e source voltage v t o output voltage y t r % n s f e r funct;on, Gid i s tfFe duty r a t i o 8 t o input current i ( s ) t r a n s f e r f u n c t i o n , and so on. For the proposed canonical c i r c u i t model i n F i g . 11, we d i r e c t l y g e t : o r , a f t e r rearrangement i n t o t h e form o f (24) : - . Direct cornoarison o f (.2 4-) and (26) ~ r o v i d e sthe solutions for H e ( s ) , e ( s ) , and j ( s ) i n terms o f the known t r a n s f e r functions G v g , G v d , Gig and Gid as: Note t h a t i n ( 2 7 ) t h e parameter 1 / p represents t h e i d e a l dc voltage gain when a l l t h e p a r a s i t i c s are zero. For t h e previous boost power stage example, from ( 1 9 ) we get u 1-D and t h e correct i o n factor i n ( 1 9 ) i s then associated w i t h t h e e f f e c t i v e f i l t e r network H e ( s ) . However, l~ could be found from - ?v = -cT~-lb 8 -u 1 X (correction factor) ,-. i n which the output voltage y coinc!des w i t h the state-variable capacitance voltage v . . From ( 2 8 ) and ( 2 9 ) one obtains p = D ' / D W i t h use o f ( 2 9 ) t o derive t r a n s f e r f u n c t i o n s , and upon s u b s t i t u t i o n i n t o ( 2 7 ) . there r e s u l t s (28) by s e t t i n g a l l p a r a s i t i c s t o zero and reducing t h e correction f a c t o r t o 1. The physical s i g n i f i c a n c e o f t h e i d e a l dc gain p i s t h a t it a r i s e s as a consequence o f t h e switching a c t i o n , so i t cannot be associated with t h e e f f e c t i v e f i l t e r network which a t dc has a gain ( a c t u a l l y attenuation) equal t o t h e correction factor. The procedure f o r finding t h e four elements i n the canonical model o f F i g . 11 i s now b r i e f l y reviewed. F i r s t , from ( 2 8 ) t h e b a s i c dc-to-dc conversion f a c t o r p i s found as a f u n c t i o n o f dc duty r a t i o D . Next, from t h e s e t o f a l l t r a n s f e r functions (23) only those defined by ( 2 4 ) are actually calculated. Then, by use o f t h e s e four t r a n s f e r functions G vd' ' v " d' ' i f (27) the frequency dependent geherators e s and j ( s ) as, w e l l as t h e low-pass f i l t e r t r a n s f e r function H ( s ) are obtained. The two generators could be f u r t h e r put i n t o t h e form i n which V i s t h e dc output voltage. The e f f e c t i v e f i l t e r t r a n s f e r f u n c t i o n i s e a s i l y seen as a low-pass LC f i l t e r w i t h Le = and w i t h load R . The two generators i n t h e canonical model o f F i g . 11 are i d e n t i f i e d by LID'^ We now derive the same model b u t t h i s time using t h e equivalent c i r c u i t transformations and path b i n t h e Flowchart o f F i g . 1 . A f t e r perturbation and l i n e a r i z a t i o n o f the c i r c u i t averaged model i n F i g . 7c ( w i t h Re-0) the s e r i e s o f equivalent c i r c u i t s 12 i s obtained. %-;ip. - where f l ( 0 ) f 2 ( 0 ) = 1 , such t h a t t h e parameters E and J could be i d e n t i f i e d as dc gains o f t h e frequency dependent functions e ( s ) and j( 6 ) . F i n a l l y , a general s y n t h e s i s procedure 1101 f o r r e a l i z a t i o n o f L,C t r a n s f e r f u n c t i o n s terminated i n a s i n g l e load R could be used t o obtain a low-pass ladder-network c i r c u i t r e a l i z a t i o n o f t h e e f f e c t i v e low-pass network He(s). Though f o r t h e second-order example o f He(s) t h i s step i s t r i v i a l and could be done by i n s p e c t i o n , f o r higher-order t r a n s f e r functions the orderly procedure o f t h e s y n t h e s i s [ l o ] i s almost mandatory. 5.2 Example: Ideal Buck-boost Power Stage For t h e buck-boost c i r c u i t shorn i n Fin. 7c p i g . 12. Equivalent c i r c u i t transformations of t h e f i n a l c i r c u i t averaged model ( a ) , leading t o i t s canonical c i r c u i t r e a l i z a t i o n (c) demonstrated on t h e buck-boost example o f Pig. 7c ( w i t h Rf-0 , Rc-0 ). The o b j e c t i v e of t h e t r a n s f ormations i s t o reduce t h e o r i g i n a l f o u r d u t y - r a t i o dependent gene r a t o r s i n F i g . 1 2 a t o j u s t two g e n e r a t o r s ( v o l t age and c u r r e n t ) i n Fig. 1 2 which ~ a r e a t the inAs t h e s e c i r c u i t t r a n s put p o r t o f t h e model. f o r m a t i o n s u n f o l d , one s e e s .how t h e frequency dependence i n t h e g e n e r a t o r s a r i e e s n a t u r a l l y , a s i n ~ i g .12b. Also, by t r a n s f e r of t h e two gene r a t o r s i n F i g . 32b from t h e secondary t o t h e primary of t h e l : D t r a n s f o r m e r , and t h e i n d u c t a n c e L t o t h e secondary of t h e D ' : l transformer, the cascade o f two i d e a l t r a n s f o r m e r s i s reduced t o t h e s i n g l e transformer with equivalent turns A t t h e same time t h e e f f e c t i v e f i l t e r r a t i o D':D. network Le, C, R i s g e n e r a t e d . Expreseione f o r t h e elements i n t h e c a n o n i c a l e q u i v a l e n t c i r c u i t can b e found i n a s i m i l a r way f o r any c o n v e r t e r c o n f i g u r a t i o n . R e s u l t s f o r t h e t h r e e f a m i l i a r c o n v e r t e r s , t h e buck, b o o s t , and buck-boost power s t a g e s a r e summarized i n Table I. Table I Definition of t h e elements i n t h e c a n o n i c a l c i r c u i t model of Fig. 11 f o r t h e t h r e e common power s t a g e s of F i g . 7. It may be n o t e d i n T a b l e I t h a t , f o r t h e buckb o o s t power s t a g e , p a r a m e t e r s E and J have n e g a t i v e s i g n s , namely E = - v / D ~ and J = - v / ( D ' ~ R ) . However, as s e e n from t h e p o l a r i t y of t h e i d e a l D':D t r a n s f o r m e r In F i g . 1 2 c t h i s s t a g e i s a n i n v e r t i n g one. Hence, f o r p o s i t i v e i n p u t dc v o l t a g e V , t h e o u t p u t d c v o l t a g e V is n e g a t i v e (V < 0 ) s f n c e V/Vg -D/D8. T h e r e f o r e E > 0, J > 0 and c o n s e q u e n t l y t h e p o l a r i t y of t h e v o l t a g e and c u r r e n t d u t y - r a t i o dependent g e n e r a t o r s i s n o t changed b u t i s as shown i n F i g . 12c. Horeo v e r , t h i s i s t r u e i n g e n e r a l : r e g a r d l e s s of any i n v e r s i o n p r o p e r t y of t h e power s t a g e , t h e p o l a r i t y of two g e n e r a t o r s s t a y s t h e same a s In Fig. 11. - 5.3 S i g n i f i c a n c e of t h e Canonical C i r c u i t Model and R e l a t e d G e n e r a l i z a t i o n s = . - .- --. - - . p a s s f i l t e r i n g ( r e p r e s e n t e d by t h e e f f e c t i v e lowp a s s f i l t e r n e t v o r k H,(s)). Note a l s o t h a t t h e current generator j ( s ) a i n the canonical c i r c u i t model, eyen though e u p e r f l u o u e when t h e s o u r c e v o l t a g e v (a) i e i d e a l , i s n e c e s s a r y t o r e f l e c t t h e i n f l u k c e of a m n i d e a l s o u r c e g e n e r a t o r (with some i n t e r n a l impedance) o r of a n i n p u t f i l t e r [ 7 ] upon t h e b e h a v i o u r of t h e c o n v e r t e r . I t s p r e s e n c e e n a b l e s one e a s i l y t o i n c l u d e t h e l i n e a r i z e d c i r c u i t model of a s w i t c h i n g c o n v e r t e r power s t a g e i n o t h e r l i n e a r c i r c u i t s , aa t h e n e x t s e c t i o n w i l l illustrate. Another s i g n i f i c a n t f e a t u r e o f t h e canoni c a l c i r c u i t model i s t h a t any s w i t c h i n g dc-to-dc c o n v e r t e r can b e reduced by u s e of ( 2 3 ) , (24). (27) and (28) t o t h i s f i x e d topology form, a t l e a s t a s f a r a s i t s i n p u t - o u t p u t and c o n t r o l prope r t i e s a r e concerned. Hence t h e p o s s i b i l i t y a r i s e s f o r u s e of t h i s model t o compare i n an e a s y and unique way v a r i o u s performance c h a r a c t e r i s t i c s of d i f f e r e n t c o n v e r t e r s . Some examples of such comparisons a r e given below. 1. The f i l t e r networks can b e compared w i t h respect t o t h e i r e f f e c t i v e n e s s throughout t h e dynamic d u t y c y c l e D r a n g e , b e c a u s e i n g e n e r a l t h e e f f e c t i v e f i l t e r elements depend on t h e s t e a d y s t a t e d u t y r a t i o D. Thus, one h a s t h e o p p o r t u n i t y t o choose t h e c o n f i g u r a t i o n and t o o p t i m i z e t h e s i z e and weight. 2. B a s i c dc-to-dc c o n v e r s i o n f a c t o r s pl(D) and p2(D) can b e compared as t o t h e i r e f f e c t i v e range. For some c o n v e r t e r s , t r a v e r s a l of t h e range of d u t y r a t i o D from 0 t o 1 g e n e r a t e s any c o n v e r s i o n r a t i o ( a s i n t h e i d e a l buckb o o s t c o n v e r t e r ) , w h i l e i n o t h e r s t h e convers i o n r a t i o might b e r e s t r i c t e d ( a s i n t h e Weinberg c o n v e r t e r [ 4 ] , f o r which k p - 3 ) . 2 3. I n t h e c o n t r o l s e c t i o n of t h e c a n o n i c a l model one can compare t h e f r e q u e n c y dependences of t h e g e n e r a t o r s e ( s ) and j ( s ) f o r d i f f e r e n t c o n v e r t e r s and s e l e c t t h e c o n f i g u r a t i o n t h a t b e s t f a c i l i t a t e s s t a b i l i z a t i o n of a feedback r e g u l a t o r . For example, i n t h e buck-boost conv e r t e r e ( ~ )i s a polynomial, c o n t a i n i n g a c t u a l l y a r e a l zero i n the r i g h t half-plane, which undoubtedly c a u s e s some s t a b i l i t y problems and need f o r p r o p e r compensation. 4. F i n a l l y , t h e c a n o n i c a l model a f f o r d s a v e r y convenient means t o s t o r e and f i l e i n f o r mation on v a r i o u s dc-to-dc c o n v e r t e r s i n a comp u t e r memory i n a form comparable t o T a b l e I. Then, thanks t o t h e f i x e d topology o f t h e c a n o n i c a l c i r c u i t model, a s i n g l e computer program can b e used t o c a l c u l a t e and p l o t v a r i o u s q u a n t i t i e s as f u n c t i o n s of frequency ( i n p u t and o u t p u t impedance, a u d i o s u s c e p t i b i l i t y , d u t y r a t i o t o o u t p u t t r a n s f e r r e s p o n s e , and s o o n ) . Also, v a r i o u s i n p u t f i l t e r s a n d / o r a d d i t i o n a l o u t p u t f i l t e r networks can e a s i l y be added i f desired. f u n c t i o n s o f complex frequency s. Hence, g e n e r a l b o t h some new z e r o s and p o l e s a r e i n t r o duced i n t o t h e d u t y r a t i o t o o u t p u t t r a n s f e r f u n c t i o n owing t o t h e s w i t c h i n g a c t i o n , i n a d d i t i o n t o t h e p o l e s and z e r o s of t h e e f f e c t i v e f i l t e r network ( o r l i n e t o o u t p u t t r a n s f e r func t i o n ) . However, i n s p e c i a l c a s e s , a s i n a l l t h o s e shown i n Table I, t h e frequency dependence might r e d u c e simply t o polynomials, and even f u r t h e r i t might show up o n l y i n t h e v o l t a g e dependent g e n e r a t o r s ( a s i n t h e b o o s t , o r buckb o o s t ) and r e d u c e t o a c o n s t a n t ( f ( s ) i 1 ) f o r t h e c u r r e n t g e n e r a t o r . ~ e v e r t g e l e s s ,t h i s does n o t p r e v e n t u s from modifying any of t h e s e C i r c u i t s i n a vay t h a t would e x h i b i t t h e g e n e r a l result i n t r o d u c t i o n of b o t h a d d i t i o n a l z e r o s a s v e l l as poles. -- L e t ue now i l l u s t r a t e t h i s g e n e r a l r e s u l t on a climple m o d i f i c a t i o n o f t h e f a m i l i a r b o o s t c i r c u i t , w i t h a r e s o n a n t L1,C1 c i r c u i t i n s e r i e s w i t h t h e i n p u t i n d u c t a n c e L, a s shown i n Fig. 13. F i g . 13. Modified b o o s t c i r c u i t a s a n i l l u s t r a t i o n of g e n e r a l f r e q u e n c y b e h a v i o u r of t h e g e n e r a t o r s i n t h e c a n o n i c a l c i r c u i t model of F i g . 11. By i n t r o d u c t i o n of t h e c a n o n i c a l c i r c u i t model f o r t h e b o o s t power s t a g e ( f o r t h e c i r c u i t t o t h e r i g h t o f c r o s s s e c t i o n AA') and u s e of d a t a from Table I , t h e e q u i v a l e n t averaged c i r c u i t model of Fig. 14a i s o b t a i n e d . Then, by a p p l i c a t i o n of t h e e q u i v a l e n t c i r c u i t t r a n s f o r m a t i o n a s o u t l i n e d p r e v i o u s l y , t h e averaged model i n t h e c a n o n i c a l c i r c u i t form i s o b t a i n e d i n F i g . 14b. A s can be s e e n from Fig. 14b, t h e v o l t a g e generator h a s . a double pole a t t h e resonant f r e quency U r = of t h e p a r a l l e l L1,C, n e t work. However, t h e e f f e c t i v e f i l t e r t r a k f e r f u n c t i o n h a s a double z e r o ( n u l l i n magnitude) a t P r e c i s e l y t h e same l o c a t i o n s u c h t h a t t h e two 1/m p a i r s e f f e c t i v e l y c a n c e l . Hence, t h e r e s o n a n t n u l l i n t h e magnitude r e s p o n s e , w h i l e p r e s e n t i n the l i n e voltage t o output t r a n s f e r function, is n o t s e e n i n t h e d u t y r a t i o - t o o u t p u t t r a n s f e r funct i o n . T h e r e f o r e , t h e p o s i t i v e e f f e c t of r e j e c t i o n of c e r t a i n i n p u t f r e q u e n c i e s around t h e r e s o n a n t frequency w i s n o t accompanied by a d e t r i m e n t a l e f f e c t on t g e l o o p g a i n , which w i l l n o t cont a i n a n u l l i n t h e magnitude r e s p o n s e . T h i s example d e m o n s t r a t e s y e t a n o t h e r import a n t a s p e c t o f m o d e l l i n g w i t h u s e of t h e a v e r a g i n g t e c h n i q u e . I n s t e a d of a p p l y i n g i t d i r e c t l y t o t h e whole c i r c u i t i n F i g . 1 3 , we have i n s t e a d implemented i t o n l y w i t h r e s p e c t t o t h e s t o r a g e element network which e f f e c t i v e l y t a k e s p a r t i n t h e s w i t c h i n g a c t i o n , namely L, C, and R. Upon s u b s t i t u t i o n of t h e switched p a r t of t h e network by t h e averaged c i r c u i t model, a l l o t h e r l i n e a r c i r c u i t s of t h e complete model a r e r e t a i n e d a s t h e y a p p e a r i n t h e o r i g i n a l c i r c u i t (such as L1,C1 i n Fig. 1 4 a ) . Again, t h e c u r r e n t g e n e r a t o r i n F i g . 14a i s t h e one which r e f l e c t s t h e e f f e c t of t h e i n p u t r e s o n a n t circuit. I n t h e n e x t s e c t i o n , t h e same p r o p e r t y i s c l e a r l y displayed f o r a closed-loop regulatorconverter with o r without the input f i l t e r . 6. SWITCHING MODE REGULATOR MODELLING This s e c t i o n demonstrates t h e ease with which t h e d i f f e r e n t c o n v e r t e r c i r c u i t models developed i n p r e v i o u s s e c t i o n s c a n be i n c o r p o r a t e d i n t o more complicated systems s u c h a s a s w i t c h i n g mode r e g u l a t o r . I n a d d i t i o n , a b r i e f d i s c u s s i o n of m o d e l l i n g of modulator s t a g e s in g e n e r a l i s i n c l u d e d , and a complete g e n e r a l switching-mode r e g u l a t o r c i r c u i t model i s g i v e n . A g e n e r a l r e p r e s e n t a t i o n .of a switching-mode r e g u l a t o r i s shown i n F i g . 1 5 . For c o n c r e t e n e s s , t h e switching-mode c o n v e r t e r i s r e p r e s e n t e d by a buck-boost power s t a g e , and t h e i n p u t and p o s s i b l e a d d i t i o n a l o u t p u t f i l t e r a r e r e p r e s e n t e d by a ,unrroulated Fig. 1 4 . Equivalent c i r c u i t transformation leading t o t h e c a n o n i c a l c i r c u i t model (b) of t h e c i r c u i t i n F i g . 13. nnout rrqufated output 7 i n p u t and o u t p u t f i l t e r s . The b l o c k diaLC gram i s g e n e r a l , and s i n g l e - s e c t i o n f i l t e r s and a buck-boost c o n v e r t e r a r e shown a s t y p i c a l r e a l i z a t i o n s . s i n g l e - s e c t i o n low-pass LC c o n f i g u r a t i o n , b u t t h e d i s c u s s i o n a p p l i e s t o any c o n v e r t e r and any f i l t e r configuration. The main d i f f i c u l t y i n a n a l y s i n g t h e switchr e g u l a t o r l i e s . i n t h e modelling of i t s nonl i n e a r P a r t , t h e switching-mode c o n v e r t e r . HOWever, we have succeeded i n p r e v i o u s s e c t i o n s i n o b t a i n i n g t h e s m a l l - s i g n a l low-frequency c i r c u i t model of any "two-state" s w i t c h i n g dc-to-dc conv e r t e r , o p e r a t i n g i n t h e continuous conduction mode, i n t h e Canonical C i r c u i t form. The o u t p u t f i l t e r i s shown s e p a r a t e l y , t o emphasize t h e f a c t t h a t i n averaged modelling of t h e switching-mode c o n v e r t e r only t h e s t o r a g e elements which a r e a c t u a l l y involved i n t h e s w i t c h i n g a c t i o n need be t a k e n i n t o account, t h u s minimizing t h e e f f o r t i n i t s modelling. V, + cg converter and modulator model ing The n e x t s t e p i n development o f t h e r e g u l a - tor equivalent c i r c u i t i s t o o b t a i n a model f o r t h e modulator. T h i s i s e a s i l y done by w r i t i n g an e x p r e s s i o n f o r t h e e s s e n t i a l f u n c t i o n of t h e modul a t o r , which i s t o Convert an (analog) c o n t r o l v o l t a g e Vc t o t h e s w i t c h duty r a t i o D. T h i s exp r e s s i o n can b e w r i t t e n D = V /Vm i n which, by d e f i n i t i o n , Vm i s t h e range oh c o n t r o l s i g n a l r e q u i r e d t o sweep t h e d u t y r a t i o o v e r i t s f u l l range from 0 t o 1. A s m a l l v a r i a t i o n vc superimposed upon Vc t h e r e f o r e produces a correspond i n g v a r i a t i o n a = Gc/vm i n D, which can be g e n e r a l i z e d t o account f o r a nonuniform frequency response a s 'm C i n which fm(0) 1. Thus, t h e c o n t r o l v o l t a g e t o d u t y r a t i o s m a l l - s i g n a l transmission c h a r a c t e r i s t i c of t h e modulator can be r e p r e s e n t e d i n gene r a l by t h e two parameters Vm and f m ( s ) , regardl e s s of t h e d e t a i l e d mechanism by which t h e modul a t i o n i s achieved. Hence, by s u b s t i t u t i o n f o r a from (32) t h e two g e n e r a t o r s i n t h e c a n o n i c a l c i r c u i t model of t h e s w i t c h i n g c o n v e r t e r can b e expressed i n terms of t h e a c c o n t r o l v o l t a g e sad t h e r e s u l t i n g model i s t h e n a l i n e a r a c e q u i valent c i r c u i t t h a t represents the small-signal t r a n s f e r p r o p e r t i e s of t h e n o n l i n e a r p r o c e s s e s i n t h e modulator and c o n v e r t e r . cc, It remains simply t o add t h e l i n e a r amplif i e r and t h e i n p u t and o u t p u t f i l t e r s t o o b t a i n t h e a c e q u i v a l e n t c i r c u i t o f t h e complete closedloop r e g u l a t o r as shown i n Fig. 16. The modulator t r a n s f e r f u n c t i o n h a s been i n c o r p o r a t e d i n t h e g e n e r a t o r d e s i g n a t i o n s , and t h e g e n e r a t o r symbol h a s been changed from a c i r c l e t o a s q u a r e t o emphasize t h e f a c t t h a t , i n t h e closed-loop r e g u l a t o r , t h e g e n e r a t o r s no l o n g e r a r e independent b u t a r e dependent on a n o t h e r s i g n a l i n t h e same system. The connection from point Y t o the e r r o r amplifier, v i a the reference v o l t a g e summing node, r e p r e s e n t s t h e b a s i c v01t a g e feedback n e c e s s a r y t o e s t a b l i s h t h e system a s a v o l t a g e r e g u l a t o r . The dashed connection from P o i n t Z i n d i c a t e s a p o e s i b l e a d d i t i o n a l feedback s e n s i n g ; t h i s second feedback s i g n a l may E e,(s)= - f , ( ~ ) f ~ ( s ) ~ ~ Vm Pig. 16. ------dc ref General s m a l l - s i g n a l a c e q u i v a l e n t c i r c u i t f o r t h e switching-mode r e g u l a t o r of F i g . 15. be d e r i v e d , f o r example, from t h e i n d u c t o r f l u x , inductor current, o r capacitor current, a s i n v a r i o u s "two-loop" c o n f i g u r a t i o n s t h a t a r e i n use t91. Once a g a i n t h e c u r r e n t g e n e r a t o r i n Fig. 16 i s r e s p o n s i b l e f o r t h e i n t e r a c t i o n between t h e switching-mode r e g u l a t o r - c o n v e r t e r and t h e i n p u t f i l t e r , t h u s c a u s i n g performance d e g r a d a t i o n and/ o r s t a b i l i t y problems when an a r b i t r a r y i n p u t f i l t e r i s added. The problem of how p r o p e r l y t o d e s i g n t h e i n p u t f i l t e r is t r e a t e d i n d e t a i l i n (71 As shown i n Fig. 1 6 we h a v e succeeded i n obt a i n i n g t h e l i n e a r c i r c u i t model o f t h e complete s w i t c h i n g mode-regulator. Hence t h e w e l l - k n m body of l i n e a r feedback t h e o r y can b e w e d f o r both a n a l y s i s and d e s i g n of t h i s t y p e of r e g u l a tor. 7. CONCLUSIONS A g e n e r a l method f o r m o d e l l i n g power s t a g e s o f any s w i t c h i n g dc-to-dc c o n v e r t e r h a s been developed through t h e s t a t e - s p a c e approach. The fundamental s t e p i s i n replacement of t h e s t a t e space d e s c r i p t i o n s of t h e two s w i t c h e d networks by t h e i r average over t h e s i n g l e s w i t c h i n g p e r i o d T, which r e s u l t s i n a s i n g l e continuous s t a t e s p a c e e q u a t i o n d e s c r i p t i o n (3) d e s i g n a t e d t h e b a s i c averaged s t a t e - s p a c e model. The e s s e n t i a l approximations made a r e i n d i c a t e d i n t h e Append i c e s , and a r e shown t o b e j u s t i f i e d f o r any p r a c t i c a l dc-to-dc s w i t c h i n g c o n v e r t e r . The subsequen t p e r t u r b a t i o n and l i n e a r i z a t i o n step under t h e s m a l l - s i g n a l aesumption (12) l e a d s t o t h e f i n a l s t a t e - s p a c e averaged model given by (13) and (14). These e q u a t i o n s then s e r v e as t h e b a s i s f o r development of t h e most i m p o r t a n t q u a l i t a t i v e r e s u l t of t h i s v o r k , t h e c a n o n i c a l c i r c u i t model o f F i g . 11. D i f f e r e n t c o n v e r t e r s a r e r e p r e s e n t e d simply by a n appropria t e s e t of formulas ((27) and (28)) f o r f o u r elements i n t h i s g e n e r a l e q u i v a l e n t c i r c u i t . Bes i d e s i t s u n i f i e d d e s c r i p t i o n , o f which s e v e r a l examples a r e given i n Table I , one of t h e sdvant a g e s of t h e c a n o n i c a l c i r c u i t model is t h a t v a r i o u s performance c h a r a c t e r i s t i c s of d i f f e r e n t s w i t c h i n g c o n v e r t e r s can b e compared i n a quick and e a s y manner. Although t h e s t a t e - s p a c e modelling approach has been developed i n t h i s paper f o r two-state s w i t c h i n g c o n v e r t e r s , t h e method can be extended t o m u l t i p l e - s t a t e c o n v e r t e r s . Examples of t h r e e s t a t e c o n v e r t e r s a r e t h e f a m i l i a r buck, b o o s t , and buck-boost power s t a g e s o p e r a t e d i n t h e d l s continuous conduction mode, and dc-to-ac switchi n g i n v e r t e r s i n which a s p e c i f i c o u t p u t waveform i s "assembled" from d i s c r e t e segments a r e examples of m u l t i p l e - s t a t e c o n v e r t e r s . I n c o n t r a s t w i t h t h e s t a t e - s p a c e modelling approach, f o r any p a r t i c u l a r c o n v e r t e r an a l t e r n a t i v e p a t h v i a h y b r i d modelling and c i r c u i t t r a n s f o r m a t i o n could be followed, which a l s o a r r i v e s f i r s t a t t h e f i n a l c i r c u i t averaged model e q u i v a l e n t of (13) and (14) and f i n a l l y , a f t e r equivalent c i r c u i t transformations, again a r r i v e s a t t h e c a n o n i c a l c i r c u i t model. Regardless of t h e d e r i v a t i o n p a t h , t h e c a n o n i c a l c i r c u i t model can e a s i l y be incorporat e d i n t o an e q u i v a l e n t c i r c u i t model of a comp l e t e s w i t c h i n g r e g u l a t o r , a s i l l u s t r a t e d i n Fig. 16. Perhaps t h e most i m p o r t a n t consequence of t h e c a n o n i c a l c i r c u i t model d e r i v a t i o n v i a t h e g e n e r a l s t a t e y a p a c e averaged model (13). ( 1 4 ) , (23) and (24) i s i t s p r e d i c t i o n through (27) of a d d i t i o n a l z e r o s a s w e l l a s p o l e s i n t h e duty r a t i o to output t r a n s f e r function. I n addition frequency dependence i s a n t i c i p a t e d i n t h e duty r a t i o dependent c u r r e n t g e n e r a t o r of Fig. 11, even though f o r p a r t i c u l a r c o n v e r t e r s considered i n Table I, i t reduces merely t o a c o n s t a n t . Furthermore f o r some a w i t c h i n g networks v h i c h would e f f e c t i v e l y i n v o l v e more than two s t o r a g e elements, h i g h e r o r d e r polynomials should b e expected i n f l ( s ) a n d / o r f 2 ( s ) of Fig. 11. The i n s i g h t s t h a t have emerged from t h e g e n e r a l s t a t e - s p a c e modelling approach s u g g e s t t h a t t h e r e i s a whole f i e l d of new s w i t c h i n g dcto-dc c o n v e r t e r pover s t a g e s y e t t o be conceived. This encourages a renewed s e a r c h f o r i n n o v a t i v e c i r c u i t d e s i g n s i n a f i e l d which is y e t young, and promises t o y i e l d a s i g n i f i c a n t number of i n v e n t i o n s i n t h e s t r e a m of i t s f u l l development. This p r o g r e s s w i l l n a t u r a l l y be f u l l y s u p p o r t e d by new t e c h n o l o g i e s coming a t an e v e r i n c r e a s i n g pace. However, even though t h e e f f i c i e n c y and performance of c u r r e n t l y e x i s t i n g c o n v e r t e r s w i l l i n c r e a s e through b e t t e r , , f a s t e r t r a n s i s t o r s , more i d e a l c a p a c i t o r s ( w i t h lower e a r ) and s o on, it w i l l be p r i m a r i l y t h e r e s p o n s i b i l i t y of t h e c i r c u i t d e s i g n e r and i n v e n t o r t o p u t t h e s e components t o b e s t use i n an o p t i ~ ltopology. Search f o r new c i r c u i t c o n f i g u r a t i o n s , and h w b e s t t o use p r e s e n t and f u t u r e t e c h n o l o g i e s , w i l l b e of prime importance i n a c h i e v i n g t h e u l t i m a t e g o a l of neari d e a l g e n e r a l s w i t c h i n g dc-to-dc c o n v e r t e r s . REFERENCES R. D. Middlebrook, "A Continuous Model f o r t h e Tapped-Inductor Boost Converter," IEEE Power E l e c t r o n i c s S p e c i a l i s t s Conference, 1975 Record, pp. 63-79 (IEEE P u b l i c a d o n 75 CHO 965-4-AES). G. W. Wester and R. D. Middlebrook, "LowFrequency C h a r a c t e r i z a t i o n of Switched dcdc C o n v e r t e r s , " IEEE T r a n s . ' o n Aerospace and E l e c t r o n i c Systems, Vol. AES-9, No. 3 , May 1973, pp. 376-385. R. Haynes, T. K. Phelps. J . A . C o l l i n s , and R. D. Middlebrook, "The Venable C o n v e r t e r : A New Approach t o Power P r o c e s s i n g , " IEEE Power E l e c t r o n i c s S p e c i a l i s t s Conference, NASA Lewis Research C e n t e r , Cleveland, Ohio, June 8-10, 1976. A. H. Weinberg, "A Boost Regulator w i t h a New Energy-Transfer P r i n c i p l e , " Proceedings of S p a c e c r a f t Power Conditioning Seminar, pp. 115-122 (ESRO P u b l i c a t i o n SP-103, S e p t . 1974). H . F. Baker, " Q t h e I n t e g r a t i o n of L i n e a r D i f f e r e n t i a l Equations,'' Proc. Lcndon Math. SOC., 34, 347-360, 1902; 35, 333-374, 1903; second s e r i e s , 2 , 293-296, 1904. R. D. Middlebrook and S. Cuk, F i n a l Report, "Modelling and A n a l y s i s of Power P r o c e s s i n g Systems,'' NASA C o n t r a c t NAS319690. R. D. Middlebrook, "Input F i l t e r Considerat i o n s i n Design and A p p l i c a t i o n of Switching R e g u l a t o r s , " IEEE I n d u s t r y A p p l i c a t i o n s S o c i e t y Annual Meeting, Chicago, Oct. 111 4 , 1976. R. D. Middlebrook, "Describing Function P r o p e r t i e s of a Magnetic P u l s e w i d t h Modulator," IEEE Trans. on Aerospace and E l e c t r o n i c Systems, Vol. AES-9, No. 3 , May, 1973, pp. 386-398. Y . Yu, J . J. B i e s s , A. D. Schoenfeld and V. R. L a l l i , "The A p p l i c a t i o n of Standardi z e d C o n t r o l and I n t e r f a c e C i r c u i t s t o Three DC t o DC Power Converters,'' IEBE Power E l e c t r o n i c s S p e c i a l i s t s Conference, 1973 Record, pp. 237-248 (IEEE P u b l i c a t i o n 73 CHO 787-2 AES). F. F. Kuo, "Network A n a l y s i s and S y n t h e s i s , " John Wiley and Sons, I n c .