Homework 5 - Solutions

EE C128 / ME C134 Spring 2014 HW5 - Solutions UC Berkeley
Homework 5 - Solutions
Note: Each part of each problem is worth 3 points and the homework is worth a total of 24 points.
1.
State Space Analysis
Given the system represented in state space as follows:
− 1 − 7 6
− 5
˙ =
− 8 4 8
4 7 − 8
x +
− 7
r
5 y = h
− 9 − 9 − 8 i x convert the system to one where the new state vector, z , is given by
− 1 − 7 6
z =
− 8 4 8
4 7 − 8
x
Solution: Let
− 1 − 7 6
− 5
T = A =
− 8 4 8
4 7 − 8
; B =
− 7
5 and C = h
− 9 − 9 − 8 i
Then, we can rewrite the equations as
˙ = A x + Br y = C x z = T x
Using Equation (3), we can solve for x and subsitute in Equations (1) and (2) as follows, x = T
− 1 z
T
− 1
˙ = AT
− 1 z + Br
Therefore
˙ y
=
=
T AT
CT
− 1
− 1 z z + T Br (4)
(5)
Using Equations (4) and (5), we can now solve for the new system with the new state vector z as
(1)
(2)
(3)
Rev. 1.0, 02/28/2014 1 of 6
EE C128 / ME C134 Spring 2014 HW5 - Solutions shown below.
Therefore,
− 1 − 7 6
T AT
− 1
=
− 8 4 8
4 7 − 8
84
T B =
52
− 109
CT
− 1
= h
− 13 .
8 − 3 .
65 − 13 i
− 1 − 7 6
84
˙ =
− 8 4 8
4 7 − 8
z +
52
− 109
r y = h
− 13 .
8 − 3 .
65 − 13 i z
2.
Diagonalizing A State Space System
Diagonalize the following system:
˙ =
− 5 − 5 4
− 1
2 0 − 2
x +
0 − 2 − 1
2
− 2
r y = h
− 1 1 2 i x
Solution: Eigenvalues are − 1 , − 2 and − 3, since, det( λ I − A ) = ( λ + 3)( λ + 2)( λ + 1)
Solving for Eigenvectors, A x = λ x , we get,
1
1
1
u
1
=
0
; u
2
=
1
; u
3
=
1 2
− 2
− 2
Thus,
P = h u
1 u
2 u
3 i
=
1 1 1
0 1 − 2
1 2 − 2
− 2 − 4 3
P
− 1
=
2 3 − 2
1 1 − 1
Rev. 1.0, 02/28/2014
UC Berkeley
2 of 6
EE C128 / ME C134 Spring 2014 HW5 - Solutions
Now, ˙ = P
− 1 AP z + P
− 1 Bu and y = CP z ,
− 1 0 0
− 12
˙ =
0 − 2 0
0 0 − 3
z +
8
− 3
u y = h
1 4 7 i z
UC Berkeley
3.
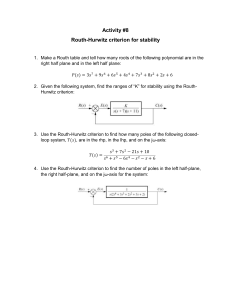
Routh-Hurwitz Stability Criterion
How many roots of the following polynomial are in the right half-plane, in the left half-plane, and on the jω -axis.
P ( s ) = s
5
+ 3 s
4
+ 5 s
3
+ 4 s
2
+ s + 3
Solution: The Routh-Hurwitz table is given as follows
Since there are 2 sign changes, there are 2 RHP poles, 3 LHP poles and no poles on the jω -axis..
4.
Stability Of Closed Loop Unity Feedback System
Determine whether the unity feedback system shown below is stable if
240
G ( s ) =
( s + 1)( s + 2)( s + 3)( s + 4)
Solution: The closed loop transfer function T ( s ) is given by
T ( s ) =
240 s 4 + 10 s 3 + 35 s 2 + 50 s + 264
Rev. 1.0, 02/28/2014 3 of 6
EE C128 / ME C134 Spring 2014 HW5 - Solutions
The Routh-Hurwitz table is given as follows
UC Berkeley
Since there are 2 sign changes, there are two closed loop poles in the RHP and the closed loop system is unstable .
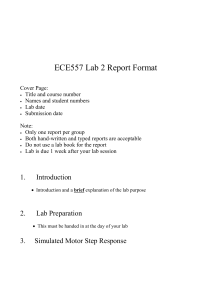
5.
Routh-Hurwitz Stability Criterion
Consider the following Routh table. Notice that the s
5 row was originally all zeros. Tell how many roots of the original polynomial were in the right half-plane, in the left half-plane, and on the jω -axis.
Solution:
Even Polynomial (6th order) : 1 sign change, therefore
RHP: 1 pole; LHP: 1 pole; jω -axis: 4 poles
Rest (1st order) : 0 sign changes, therefore
RHP: 0 poles; LHP: 1 pole jω -axis: 0 poles
Total (7th order) :
RHP: 1 pole; LHP: 2 poles; jω -axis: 4 poles
6.
Routh-Hurwitz Stability Criterion
Consider the figure given in Problem 4. Find the range of K for closed-loop stability for the following cases when the transfer function G ( s ) is given by
G ( s ) =
K ( s − a ) s ( s − b )
(a) a < 0 , b < 0
(b) a < 0 , b > 0
(c) a > 0 , b < 0
(d) a > 0 , b > 0
Rev. 1.0, 02/28/2014 4 of 6
EE C128 / ME C134 Spring 2014 HW5 - Solutions UC Berkeley
Solution: The characteristic equation for all cases is s 2 + ( K − b ) s − Ka = 0. Using Routh-Hurwitz analysis, we find the following relations for closed loop stability:
K − b > 0
− Ka > 0
(6)
(7)
(a) a < 0 , b < 0
Using Relations (6) and (7), we find that K > 0 for the system to be stable.
(b) a < 0 , b > 0
Using Relations (6) and (7), we find that K > b for the system to be stable.
(c) a > 0 , b < 0
Using Relation (6), we find that K > b , and from Relation (7) we find that K < 0. Therefore, b < K < 0.
(d) a > 0 , b > 0
Since both Relations (6) and (7) cannot be satisfied simultaneously, there is no such K, when the system will be stable.
7.
Stability Of Closed Loop Unity Feedback System
Consider the figure given in Problem 4. Given G ( s ) as below, find the following
K ( s + 4)
G ( s ) = s ( s + 1 .
2)( s + 2)
(a) The range of K that keeps the system stable.
(b) The value of K that makes the system oscillate.
(c) The frequency of oscillation when K is set to the value that makes the system oscillate.
Solution: The closed loop transfer function is given by:
T ( s ) =
5 K ( s + 4)
5 s 3 + 16 s 2 + (12 + 5 K ) s + 20 K
Using Routh-Hurwitz analysis, we find the following relations for closed loop stability:
192 − 20 K > 0
20 K > 0
(8)
(9)
(a) For closed loop stability, both Equations (8) and (9) need to be satisfied simultaneously. Thus
0 < K < 9 .
6.
(b) For oscillations, at least one pair of poles must lie on the imaginary axis.
K = 9 .
6 makes one pair of poles purely imaginary.
(c) Let K = 9 yields (32 s
.
2
6. Now, the characteristic equation becomes 5
+ 384)( s
2
+ 12) = 0. Roots of ( s
2 s
3
+16 s
+ 12) = 0 are ± 2
2
√
+60 s +192 = 0. Factorization
3. Therefore, ω = 2
√
3 rad/s.
Rev. 1.0, 02/28/2014 5 of 6
EE C128 / ME C134 Spring 2014 HW5 - Solutions
8.
Stability of Closed Loop Feedback System
Find the range of K to keep the system shown below stable
UC Berkeley
Solution: The closed loop transfer function is given by:
T ( s ) =
K ( s
2
+ 2 s + 1) s 3 + 2 s 2 + ( K + 1) s − K
The Routh-Hurwitz table is given below:
Thus, for stability, K < 0 and K > − 2 / 3. Therefore,
−
2
3
< K < 0
Rev. 1.0, 02/28/2014 6 of 6