SUBSTRUCTURE SHAKE TABLE TESTING WITH FORCE
advertisement

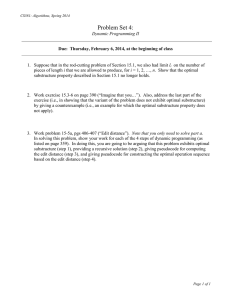
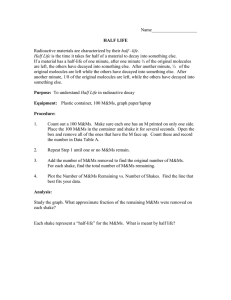
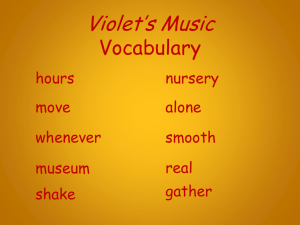
10NCEE Tenth U.S. National Conference on Earthquake Engineering Frontiers of Earthquake Engineering July 21-25, 2014 Anchorage, Alaska SUBSTRUCTURE SHAKE TABLE TESTING WITH FORCE CONTROLLED ACTUATORS M. Stehman1 and N. Nakata2 ABSTRACT Real-time hybrid simulation (RTHS) has emerged as a feasible and economical means for seismic performance assessment of structural systems. It has been successfully applied to study the system-level response, combining experimental and computational substructures. However, existing substructure techniques are limited to interface boundaries where the influence of unbalanced forces are not significant; because existing formulation procedures and experimental loading are both displacement-based, unbalanced forces are inevitable in conventional RTHS. In some cases (e.g., testing of extremely rigid specimens, soil-structure boundaries), force equilibrium becomes more critical than displacement compatibility. To accommodate such conditions, a force-based approach is essential and has to be developed in RTHS. This study presents substructure shake table testing as a case study of force-based RTHS. A four-story shear structure is divided into two substructures. The first story is tested on a shake table while the rest of the structure is computationally simulated. The interaction between the experimental and computational substructures is addressed such that the measured acceleration at the top floor in the experimental substructure is used as the base input to the computational structure while computed base shear in the computational substructure is fed back to the experimental substructure through a force-controlled actuator. As such, the overall simulation is performed at real-time with force-controlled actuators. This study presents the underlying theories of the substructure shake table test method, centralized actuator control and preliminary numerical simulations. 1 Graduate Student, Dept. of Civil Engineering, Johns Hopkins University, Baltimore, MD 21217 Assistant Professor, Dept. of Civil Engineering, Johns Hopkins University, Baltimore, MD 21217 2 Stehman M and Nakata N. Substructure shake table testing with force controlled actuators. Proceedings of the 10th National Conference in Earthquake Engineering, Earthquake Engineering Research Institute, Anchorage, AK, 2014. Substructure Shake Table Testing with Force Controlled Actuators M. Stehman1 and N. Nakata2 ABSTRACT Real-time hybrid simulation (RTHS) has emerged as a feasible and economical means for seismic performance assessment of structural systems. It has been successfully applied to study the system-level response, combining experimental and computational substructures. However, existing substructure techniques are limited to interface boundaries where the influence of unbalanced forces are not significant; because existing formulation procedures and experimental loading are both displacement-based, unbalanced forces are inevitable in conventional RTHS. In some cases (e.g., testing of extremely rigid specimens, soil-structure boundaries), force equilibrium becomes more critical than displacement compatibility. To accommodate such conditions, a force-based approach is essential and has to be developed in RTHS. This study presents substructure shake table testing as a case study of force-based RTHS. A four-story shear structure is divided into two substructures. The first story is tested on a shake table and the rest of the structure is computationally simulated. The interaction between the experimental and computational substructures is addressed such that the measured acceleration at the top floor in the experimental substructure is used as the base input to the computational structure while computed base shear in the computational substructure is fed back to the experimental substructure through a force-controlled actuator. As such, the overall simulation is performed at real-time with forcecontrolled actuators. This study presents the underlying theories of the substructure shake table test method, centralized actuator control and preliminary numerical simulations. Introduction Substructure shake table testing is a developing experimental technique that combines the fully dynamic nature of shake table tests with the versatility of real-time hybrid simulation. Substructure shake table testing allows for the critical components of the test structure to be evaluated experimentally on a shake table while the remainder of the structure is computationally analyzed. Since only a portion of the structure is tested experimentally, substructure shake table testing offers a more economical alternative to its traditional counterpart. While substructure shake table testing has shown significant promise and potential, it has yet to fully explored. Substructure shake table testing allows for structural components of interest to be evaluated while the remainder are modeled computationally. Previous researchers used this technique to test the performance of energy dissipation devices such as dampers [1], bearings [2] and even support structures for electrical devices [3]. In these works, the computational 1 Graduate Student, Dept. of Civil Engineering, Johns Hopkins University, Baltimore, MD 21217 Assistant Professor, Dept. of Civil Engineering, Johns Hopkins University, Baltimore, MD 21217 2 Stehman M and Nakata N. Substructure shake table testing with force controlled actuators. Proceedings of the 10th National Conference in Earthquake Engineering, Earthquake Engineering Research Institute, Anchorage, AK, 2014. substructure is the majority of the test structure and the experimental portion is simply a result of the response of the computational system. The authors of [4] investigated a more complex situation where the bottom or middle stories of the structure are tested experimentally. These tests required both displacement and force dependent boundary conditions: a shake table satisfied the displacement boundary condition while the force condition was supplied using a displacement feedback actuator. The authors of [5] expanded on this technique where inertial masses were used to impose the computational force on the experimental substructure. Substructure shake table testing has yet to be fully investigated when the experimental substructure is the same proportion and scale as the computational system. Furthermore, there has yet to be a study that fully addresses the situations where the boundary conditions are highly sensitive to acceleration [6, 7] and force [8]. The study presented here investigates a substructure shake table technique where the lowest stories are tested experimentally and the remainder of the structure is computationally analyzed. Here a shake table is used to impose to the ground accelerations to the experimental substructure and a force-controlled actuator is used to impose the computational forces into the experimental substructure. This paper presents the problem formulation, framework for the test method, actuator control and preliminary data from a numerical case study. Formulation of Substructure Shake Table Testing In this study, substructure shake table testing is investigated on a linear elastic multi-story singlebay shear building. In the following formulation the spatial partition scheme is such that the lower stories of the complete structure are tested experimentally and the remaining upper stories are evaluated computationally. This section presents the equations of motion for the test structure along with compatibility conditions that ensure accuracy of the RTHS. Equations of Motion A schematic of the entire test structure is shown in Fig. 1a and a dynamically equivalent partitioned structure is shown in Fig. 1b. The response of the n-story entire simulation is viewed as the reference response for the hybrid structure. Using Newton’s second law of motion the equation of motion for each floor of the entire structure can be written as: (1) where mi is the mass of each floor; xi is the displacement of each floor relative to the ground; Ri is the restoring force (including stiffness and damping effects) of the i-th floor resulting from relative motion of the between adjacent floors and is the acceleration of the ground. Since the equations of motion were derived for earthquake loading, the ground acceleration is the only input to the entire structure. mc _ nc mn xn Rn Experimental Substructure mne +1 Rne +1 x ne +1 mne Rne Interface Floor xn Re _ n e e x1 xg a.) Entire Structure Figure 1. mc _1 xc _1 Rc _1 fe me _ ne xg _ c xe _ ne Computational Substructure me _1 m1 R1 xc _ nc Rc _ nc xe _1 Re _1 Shake Table xg _ e b.) Partitioned Structure Partitioning scheme for the entire structure using substructure shake table testing. In the substructured system, the entire structure is partitioned into two structures, namely an ne -story experimental substructure evaluated on a shake table and a nc -story computational substructure, where ne and nc are chosen such that ne + nc = n . As shown in Fig 1b, an additional force, fe , is added to the top floor of the experimental substructure which incorporates the restoring from the first floor of the computational substructure. Thus the equations of motion for each floor of the experimental substructure are written as: (2) (3) where xe _ i is the i-th floor displacement of the experimental substructure relative to the shake table; Re _ i is the i-th floor restoring force and is the experimental ground acceleration imposed by the shake table. Eq. 2 holds for the first ne −1 floors of the experimental floor while Eq. 3 represents the interface floor where information from the computational substructure is imposed in the experiment. Similarly, the equations of motion for the floors of the computational system are expressed as: (4) where xi is relative to the base of the computational substructure and is the ground acceleration input for the computational substructure. In this particular configuration Eq. 2 and 3 are handled experimentally while Eq. 4 is solved numerically with real-time communication between the two substructures. Compatibility Conditions for Dynamic Equivalence In order for the substructure system to have completely equivalent dynamic properties to that of the entire structure, certain conditions have to be satisfied at every instance in time during the RTHS. Aside from an accurate choice of parameters for the substructure system ( me, mc , story stiffness and damping) there are three main compatibility conditions of interest in this type of substructure shake table testing. The experimental setup has to satisfy two compatibility conditions. The first condition is that the ground acceleration produced by the shake table matches the reference ground acceleration, that is . Since shake tables use hydraulic actuators to produce motion, this compatibility requires high performance acceleration tracking of shake tables. While this is a challenging issue, there has been significant progress in the enhancement of acceleration tracking of shake tables (namely [6, 9]). The second experimental compatibility condition requires the correct force to be applied at the top floor of the experimental substructure, namely fe = Rc _1 . Since hydraulic actuators are normally used to apply experimental forces, this condition requires accurate force tracking performance of hydraulic actuators. Force feedback control of actuators has been addressed in the past with great success recently ([8, 10]). The computational process requires that the input ground acceleration to the computational substructure is equal to the absolute acceleration of the top floor of the experimental substructure, which is to say that . This condition assures that the computational substructure is responding to the correct base excitation. With modern measurement systems (accelerometers) and real time data acquisition this condition is straightforward to satisfy. With the compatibility conditions formally stated, it is apparent that the implementation of the substructure shake table testing method presented here is fundamentally different from traditional RTHS. Namely the experimental conditions do not rely on accurate displacements but rely on accelerations and forces, which are far more sensitive. The computational conditions are now accelerations compared to forces in traditional RTHS. Since the RTHS is highly sensitive to errors in the compatibility conditions, extreme care must be taken when the system is implemented. Actuator Control for Substructure Shake Table Testing Since substructure shake table testing relies heavily on hydraulic actuators for the performance of the experimental substructure, the problem of actuator control must be properly addressed. This study utilizes a centralized control scheme to handle coupling between the actuators. In this technique, the shake table has a single independent controller while the force actuator has two controllers. The block diagram of the substructure shake table test method, including the actuator control systems is shown in Fig 2. Computational Substructure xg _ c Rc _1 - ef Centralized Force Controller Cf uf CD xg Conv xg - ed PID Experimental Substructure fe xe _ ne + xg _ e ud xg _ e Independent Shake Table Control loop Figure 2. Block diagram of substructure shake table test method including actuator control system. Fig. 2, introduces additional variables where: the Conv block converts the ground acceleration to an equivalent ground displacement, xg is the reference ground displacement; ed and e f are the tracking errors between the shake table and force controlled actuators respectively; C f and CD are the controllers for the force-controlled actuator; the shake table is assumed to have a PID controller and ud and u f are the voltages sent to each of the actuator’s servo-valves. Since both the shake table actuator and the external force actuator are connected through the experimental substructure, there will be coupling between both actuators. However, since shake tables are typically controlled through displacement feedback, the effect of the force actuator is negligible and the shake table can be controlled independently. The same cannot be said for the force-controlled actuator [10]. Therefore, in this control technique, the force actuator has two controllers: one for reference tracking and disturbance rejection, C f , and one to eliminate the effect of the shake table dynamics on the force controlled actuator, CD . In terms of actuator control, the experimental substructure can be viewed as a two-input two-output system: ⎧⎪ x g_e ⎨ ⎪⎩ fe ⎫⎪ ⎡ H x u g d ⎬ =⎢ ⎢ ⎪⎭ ⎣ H feud ⎧⎪ u ⎫⎪ H xgu f ⎤⎧⎪ ud ⎫⎪ d ⎥⎨ ⎬ = H EXP ⎨ ⎬ ⎥ uf ⎪ H feu f ⎪⎩ u f ⎪⎭ ⎪ ⎩ ⎭ ⎦ (5) and the controllers are determined based on the relations in Eq. 5. The shake table PID controller can be tuned solely from the relation H xgud . Once the shake table controller is fixed, the force feedback controller, C f , can be designed solely using a loop shaping, [8], approach on H feu f . If the shake table is completely independent of the force-controlled actuator then H xgu f = 0 and a straightforward choice of CD will decouple the force-controlled actuator from the shake table. Using the previous assumption the decoupling controller can be formed as: CD = − H feud H feu f ⋅ (PID) (6) This choice of the decoupling controller will reduce the effect of shake table on the forcecontrolled actuator (complete decoupling is achieved only if H xgu f = 0 ). This control technique, assumes that the shake table is uninfluenced by the force actuator. However in reality some coupling may exist, but as long as the coupling is very small relative to the other relationships in Eq. 5 this control technique is still valid. Once the controllers are defined, the system is ready to run substructure shake table testing. However due to the influence of actuator delays on the stability of RTHS, additional measures may be needed to remove the delay from the force controlled actuator. Actuator delay compensation techniques have been well established and the appropriate compensation algorithm should be chosen based on the specific constraints of the individual actuator. It should be mentioned that delay compensation is not needed for the shake table since the ground motion is pre-defined and the experimental system drives the RTHS. Numerical Case Study In this section, a numerical case study is performed to investigate the capabilities of substructure shake table testing including centralized actuator control. Matlab Simulink is used to simulate both the substructure shake table test and the reference entire structure. In this study, the response of a 4-story linear-shear structure subjected to ground motion is investigated. A substructure shake table test of the 4-story structure is completed to investigate the capabilities of the test method. For the substructured system, the first floor is experimental while the upper three floors are computational (refer to Fig. 1 with n = 4 , ne = 1 and nc = 3 ). Realistic parameter values are selected that are compatible with the size of the shake table at Johns Hopkins. The parameters and models for the shake table and force controlled actuators are selected in accordance with [8]. For simplicity, each story of the structure has the same N Ns physical properties: m = 70 kg , k = 5⋅10 4 and c = 187 . With these parameter choices m m the first vibration mode of the entire structure is 1.48 Hz with a damping ratio of 1.75%. Before the results of substructure table testing are discussed, the performance of the experimental substructure is investigated. The performance of the experimental setup depends on a few criteria, namely: the ability of each actuator to accurately track its reference signal with little effects of coupling and the time delay of the force-controlled actuator. The actuator controllers were designed based on the methodology from the previous section. Results from step input simulations are used to evaluate the effectiveness of the centralized control strategy. First a step displacement is sent to the shake table while the force actuator has a zero force reference, then the shake table has a constant displacement reference while the force actuator receives a step force input. The results from this simulation are shown in Fig. 3. Figure 3. Performance of experimental setup during step input tests: a.) shake table displacement; b.) force from second actuator. The results from this simulation show that the choice of controllers yields very good performance from the experimental setup. The shake table is able to follow the reference displacement with no influence from the force actuator Fig. 3a. The force-controlled actuator is also able to track the reference step force with only a small influence from the shake table. The force actuator has a 4N response to the shake table step, which quickly dies out. It is worth noting the same simulation was investigated without the decoupling controller and in that case the force actuator had a 425N response to the shake table step. Thus the decoupling controller reduces the interaction between the shake table and force actuator by approximately 99%. While both actuators are able to successfully track their reference inputs independently, the force actuator has a relatively large time delay of about 12.5ms. This time delay is too large for implementation in RTHS. To reduce this delay, the reference force is passed through a delay compensator block before being sent to the force actuator. The delay compensation algorithm used here is an inverse based compensation method known as feed-forward control. Where the reference signal is sent through a pseudo-inverse model of the closed loop force actuator. With the addition of the delay compensation algorithm, the force actuator time delay is brought down to 4ms, which is suitable for implementation in the substructure shake table test. To evaluate the substructure shake table test method, a simulation is performed with the entire RTHS system implemented. The ground motion record used for this evaluation is the 1995 Kobe ground motion, with the peak ground acceleration scaled to 0.2 g. A plot of the acceleration tracking performance of the shake table is shown in Fig 4. Figure 4. Shake table acceleration during Kobe simulation: a.) entire record; b.) zoomed-in view. As shown in Fig. 4, the shake table reproduces the reference ground acceleration within a reasonable degree of accuracy. The shake table exhibits a small time delay however shows little to no influence from the force controlled actuator. The performance of the force-controlled actuator during the simulation is shown in Fig 5. Figure 5. Experimental force during Kobe simulation: a.) entire record; b.) zoomed-in view. The force-controlled actuator is shown to accurately replicate the desired force from the computational substructure through out the simulation. As shown in Fig. 5b, a large amount of the actuator time delay is removed by using the corrected magenta line as the command to the actuator. Although the measured force still lags behind the true reference, it is acceptable and the simulation was stable. It is also worth noting that there is no influence from the shake table dynamics and the addition of the decoupling controller was successful. Figs. 4 and 5 indicate that the centralized control strategy allows for a stable simulation and acceptable performance from both the shake table and the force actuator. Next the accuracy of the structural performance is discussed. To evaluate the effectiveness of the substructure shake table test, the substructured response is compared to a simulation of the entire 4-story structure. To ensure a fair comparison of results, the input ground motion for the entire structure is the produced acceleration of the shake table during the substructured simulation. A comparison of the 4th floor absolute acceleration from both simulations is shown in Fig. 6. Figure 6. 4th floor absolute acceleration during Kobe simulations a.) time histories; b.) Fourier Transform of time histories. A comparison of the top floor accelerations from both substructured and entire simulation shows that the substructure shake table test was able to accurately reproduce the response of the reference entire structure, Fig. 6. Fig. 6a indicates that the substructured system has almost identical vibration characteristics as the entire structure. However during the free vibration portion of the simulation, the response of the substructured system decays quicker than the entire structure. This observation indicates that the substructure system has slightly more damping than the entire structure. These observations are again confirmed through a frequency domain comparison, Fig. 6b. Here both responses have almost identical characteristics except at the first natural frequency of the structure, where the substructured response has smaller magnitude due to the larger damping ratio. Overall the substructure shake table simulation performed exceptionally and was able to recreate the response of the entire structure within a reasonable tolerance. The RMS error between the top floor accelerations of both simulations was only 13%. While the results presented in this study are limited to a single simulation, the simulation data suggests that the substructure shake table test method presented in this paper could serve as a viable alternative to full-scale shake table tests. Conclusions This paper presented a new concept of substructure shake table testing where the lower stories are tested experimentally on a shake table and the upper stories are computationally analyzed. The equations of motion were formulated and compatibility requirements were discussed to ensure dynamic equivalence between the substructured system and the entire structure. The nature of this method requires accurate acceleration control of shake tables and force control techniques for the experimental actuator. A centralized control strategy was developed that allows for independent control of both the shake table and force-controlled actuator. A numerical case study was carried out to investigate the performance of the control strategy as well as the ability of the substructure shake table test method to reproduce the desired response. The results showed the proposed control strategy was effective in allowing independent control of the shake table and force actuator. Also, the substructure shake table test method was able to accurately reproduce the seismic response of the reference entire structure. This preliminary study has shown that substructure shake table testing has substantial promise as an experimental testing technique. However, further simulations and experimental investigations are needed to fully validate substructure shake table testing. Acknowledgments This work is supported by the National Science Foundation under an award entitled: “Career: Advanced Acceleration Control Methods and Substructure Techniques for Shaking Table Tests”. Grant No. CMMI-0954958. References 1. Carrion, J.E., Spencer, B.F. and Phillips, B.M. Real-time hybrid simulation for structural control performance assessment. Earthquake Engineering and Engineering Vibration 2009; 29 (8):481-492. 2. Pan, P., Nakashima, M. and Tomofuji, H. Online test using displacement-force mixed control. Earthquake Engineering and Structural Dynamics 2005; 34 (8):869-888. 3. Günay, M.S. and Mosolam, K.M. Investigation of the response of electrical insulator posts using real-time hybrid simulation on a smart shaking table. 15th World Conference on Earthquake Engineering 2012; Lisbon. 4. Shao, X., Reinhorn, A.M. and Sivaselvan, M.V. Real-time hybrid simulation using shake tables and dynamic actuators. Journal of Structural Engineering 2011 137:748-760. 5. Nakata, N. and Stehman, M. Substructure shake table test method using a controlled mass: formulation and numerical simulation. Earthquake Engineering and Structural Dynamics 2012; 41:1977-1988. 6. Stehman, M. and Nakata, N. Direct acceleration feedback control of shake tables with force stabilization. Journal of Earthquake Engineering 2012; 17(5):736-749. 7. Nakata, N. and Stehman, M. Compensation techniques for experimental errors in real-time hybrid simulation using shake tables. Smart Structures and Systems 2013; under revision. 8. Nakata, N. Effective force testing using a robust loop shaping controller. Earthquake Engineering and Structural Dynamics 2013; 42(2):261-275. 9. Phillips, B.M., Wierschem, N.E. and Spencer, B.F. Model-based multi-metric control of uniaxial shake tables. Earthquake Engineering and Structural Dynamics 2013; DOI:10.1002/eqe.2366. 10. Nakata, N. and Krug, E. Multidegrees-of-freedom effective force testing: a feasibility study and robust stability assesment. Earthquake Engineering and Structural Dynamics 2013; 42(13): 1985-2002.