Iterative Solvers Gauss
advertisement

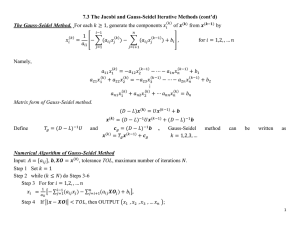
Iterative Solvers Gauss-Seidel Ch. 11 Gauss-Seidel • What is Gauss-Seidel? – Alternative to direct methods (like Gauss-Elim.) – Iterative approach – similar to the idea of successive substitution for root finding • Why do we want to we want to use it? – Works well for large numbers of equations – Error is controlled by the number of iterations (Round off error is not usually as big a concern as Gauss-Elim) – Handles sparse matrices and large matrices well because it doesn’t have to store all of the zero’s. Gauss-Seidel • Approach, Consider ⎡ a11 a12 a13 ⎤ ⎧ x1 ⎫ ⎧ b1 ⎫ (1) ⎢a ⎥⎪ ⎪ ⎪ ⎪ ⎢ 21 a 22 a 23 ⎥ ⎨ x 2 ⎬ = ⎨b 2 ⎬ (2) ⎢⎣a 31 a 32 a 33 ⎦⎥ ⎪⎩ x 3 ⎪⎭ ⎪⎩b 3 ⎪⎭ (3) • Solve equation (1) for x1, (2) for x2 and (3) for x3 x1 = b1 − a12 x2 − a13 x3 a11 x2 = b2 − a21 x1 − a23 x3 a22 x3 = b3 − a31 x1 − a32 x2 a33 1 Gauss-Seidel - Method • Start iteration process by guessing x02 and x03 and always using the most recent values of x’s b −a x −a x x1 = 1 12 2 13 3 x11 → x20 , x20 a11 x12 → x11 , x30 b2 − a21 x1 − a23 x3 x2 = a22 x31 → x11 , x12 b −a x −a x x3 = 3 31 1 32 2 Repeat using the new x’s a33 • Check for convergence: ε a ,i = x ik − x ik −1 x ik ×100% For all i’s where k = current iteration, k-1 = previous iterations Gauss-Seidel – Convergence criteria • Diagonal Dominance – the diagonal element of a row should be greater than the sum of all other row elements n aii > ∑ aij j =1 j ≠i ⎡1 3 5 ⎤ ⎢2 5 7 ⎥ ⎢ ⎥ ⎢⎣3 1 1 ⎥⎦ Is this matrix diagonally dominant? • Sufficient but not necessary (I.e., if the condition is satisfied, convergence is guaranteed, if the condition is NOT satisfied, convergence still may occur Gauss-Seidel – Relaxation for iterative methods • Motivation – speed up convergence – assuming we know the direction of the solution x k +1 extrapolated solution * New solution k iterations (k) 1 λ • Linear Extrapolation x* − x k x k +1 − x k = 1 λ x k +1 = x k + λ (x * − x k ) x k +1 = λx* + (1 − λ )x k 2 Gauss-Seidel – Relaxation for iterative methods • Motivation – speed up convergence – assuming we know the direction of the solution x k +1 extrapolated solution * New solution (present value) k iterations (k) 1 λ • Linear Extrapolation x* − x k x k +1 − x k = 1 λ k +1 k x = x + λ (x * − x k ) λ relaxation coefficient x k +1 = λx* + (1 − λ )x k Gauss-Seidel – Relaxation for iterative methods What is x* ? • x1* = b1 − a12 x2k − a13 x3k a11 Relaxation Coefficient – λ • – Typical Values: 0 < λ < 2 1. 2. – – – 3. x k +1 = λx* + (1 − λ )x k No relaxation : λ = 1 Underrelaxation: 0 < λ < 1 Provides a weighted average of current & previous results Used to make non-convergent systems converge Helps speed up convergence by damping oscillations Overrelaxation: 1 < λ < 2 – – – – Extra emphasis placed on present value Assumes the solution is preceeding to the desired result, just too slowly Will speed up convergence of a system that is already convergent Selection of λ is problem specific and can require trial and error Gauss-Seidel – Pseudocode 1st Loop: Row Normalization (divide all terms in the equation by diagonal term) 2nd Loop: Rearrange Equations: x1 = b1 − a12 x2 − a13 x3 − ⋅ ⋅ ⋅ • • – • Note a11 = 1 after normalization Error checking flag – set to 1 at the beginning of each loop – – Change to zero if any εa > εs No need to check any εa’s after that – saves computations Show Matlab Gauss-Seidel Example 3 Other Iterative Solvers and GS varients • Jacobi method – GS always uses the newest value of the variable x, Jacobi uses old values throughout the entire iteration • Iterative Solvers are regularly used to solve Poisson’s equation in 2 and 3D using finite difference/element/volume discretizations: ∂ 2T ∂ 2T ∂ 2T + + = f ( x, y , z ) ∂x 2 ∂y 2 ∂z 2 • Red Black Gauss Seidel • Multigrid Methods • Determine the force in each member of the truss and the reaction forces Engineering Application 400 45ο 45ο 200 60ο 30ο 4