Nyquist stability criterion Control Systems
advertisement

Control Systems
Nyquist stability criterion
L. Lanari
Sunday, November 9, 2014
Outline
•
•
•
•
•
•
•
polar plots when F(j!) has no poles on the imaginary axis
Nyquist stability criterion
what happens when F(j!) has poles on the imaginary axis
general feedback system
stability margins (gain and phase margin)
Bode stability criterion
effect of a delay in a feedback loop
Lanari: CS - Stability - Nyquist
Sunday, November 9, 2014
2
Unit negative feedback
closed-loop system
+
F (s)
-
W(s)
we have seen that
•
in a unit feedback system, the closed-loop system has hidden modes if and only if
the open-loop has them
•
the open-loop hidden modes are inherited unchanged by the closed-loop
therefore we make the hypothesis that there exists
no open-loop hidden mode with non negative real part
(since this would be inherited by the closed-loop system)
stability of the closed-loop is only determined by the closed-loop poles
Lanari: CS - Stability - Nyquist
Sunday, November 9, 2014
3
We are going to determine the
stability of the closed-loop system from the open-loop system features
(i.e. the graphical representation of the open-loop frequency response F(j!))
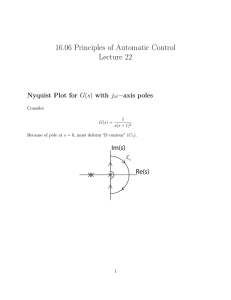
Nyquist diagram: (closed) polar plot of F(j!) with ω ∈ (−∞, ∞)
we plot the magnitude and phase on the same plot using the frequency as a parameter, that
is we use the polar form for the complex number F(j!)
mirror image
being F(s) a rational fraction
+ positive
phase
ω ∈ (−∞, 0]
F(-j!) = F *(j!)
and therefore the plot for negative
angular frequencies ! is the symmetric
wrt the real axis of the one obtained for
F(j!1) ω ∈ [0, ∞)
F(j!2)
in !1
in !2
positive !
Lanari: CS - Stability - Nyquist
Sunday, November 9, 2014
4
Hyp. no open-loop poles on the imaginary axis (i.e. with Re[.] = 0)
some polar plots
polar plot of F(j!) can be obtained from the Bode diagrams (magnitude and phase information)
5
0
1
0.8
−10
−15
Magnitude
Magnitude (dB)
−5
dB
−20
not in dB
0.6
0.4
−25
−30
0.2
−35
−40
0
−2
10
0
2
10
frequency (rad/s)
−2
10
10
0
2
10
frequency (rad/s)
10
0.6
20
0.4
0
0.2
1
F (s) =
s+1
−40
−60
Im
Phase (deg)
−20
ω1
ω2
ω7
ω6
ω5
0
−0.2
ω3
−80
−0.4
−100
−2
10
0
10
frequency (rad/s)
ω4
2
10
0
0.2
0.4
0.6
0.8
1
Re
Lanari: CS - Stability - Nyquist
Sunday, November 9, 2014
5
fact I
The closed-loop system W(s) has poles with Re[.] = 0
if anf only if
the Nyquist plot of F (j!) passes through the critical point (-1,0)
Proof.
Nyquist plot intersects the real axis in -1 therefore ∃ ω̄ such that F (j ω̄) = −1
that is F (j ω̄) + 1 = 0
F (s)
W (s) =
1 + F (s)
Being the closed-loop transfer function given by
this shows that s = j ω̄ is a pole of W(s)
(and vice versa).
Lanari: CS - Stability - Nyquist
Sunday, November 9, 2014
6
Hyp. no open-loop poles on the imaginary axis (i.e. with Re[.] = 0)
fact II
let us define
•
•
•
nF+ the number of open-loop poles with positive real part
nW+ the number of closed-loop poles with positive real part
Ncc the number of encirclements the Nyquist plot of F (j!) makes
around the point (-1, 0) counted positive if counter-clockwise
a direct application of Cauchy’s principle of argument gives
Ncc = nF+ - nW+
Obviously if the encirclements are defined positive clockwise, let them be
Nc, the relationship changes sign and becomes Nc = nW+ - nF+
Lanari: CS - Stability - Nyquist
Sunday, November 9, 2014
7
Hyp. no open-loop poles on the imaginary axis (i.e. with Re[.] = 0)
(this hypothesis guarantees that, if F (s) is strictly proper, the polar plot of F (j!) is a
closed contour and therefore we can determine the number of encirclements)
In order to guarantee closed-loop stability, we need nW+ = 0 (no closed-loop poles with
positive real part) and no poles with null real part (which we saw being equivalent to asking
that the Nyquist plot of F (j!) does not go through the point (-1, 0))
If the open-loop system has no poles on the imaginary axis, the unit negative feedback
system is asymptotically stable
if and only if
i) the Nyquist plot does not pass through the point (-1, 0)
ii) the number of encirclements around the point (-1, 0) counted positive if counterclockwise is equal to the number of open-loop poles with positive real part, i.e.
Ncc = nF+
Nyquist stability criterion
Lanari: CS - Stability - Nyquist
Sunday, November 9, 2014
8
Remarks
•
if the open-loop system has no positive real part poles then we obtain the simple
•
N&S condition Ncc = 0 which requires the Nyquist plot not to encircle (-1, 0)
if the stability condition is not satisfied then we have an unstable closed-loop system
•
with nW+ = nF+ - Ncc positive real part poles
condition i), which ensures that the closed-loop system does not have poles with null
part, could be omitted by noting that if the Nyquist plot goes through the critical
point (-1, 0) then the number of encirclements is not well defined
examples on the number of encirclements depending on where is the critical point
0
-1
+1
0
Lanari: CS - Stability - Nyquist
Sunday, November 9, 2014
0 -2
0
-2
-1
0
0
2
0
2
1
0
9
not in dB
in dB
0
1
−10
0.8
Magnitude
Magnitude (dB)
−20
−30
−40
−50
0.6
0.4
−60
0.2
−70
−80 −2
10
0
10
frequency (rad/s)
2
10
phase
100
F (s) =
(s + 10)2
0 −2
10
0
2
10
frequency (rad/s)
10
0.6
50
0.4
Ncc = nF+ = 0
0.2
ω6
−50
Im
Phase (deg)
0
ω1
0
ω5
−100
−0.2
−150
−0.4
ω2
ω4
−0.6
−200 −2
10
0
10
frequency (rad/s)
10
Lanari: CS - Stability - Nyquist
Sunday, November 9, 2014
ω3
2
−0.2
0
0.2
0.4
0.6
Re
0.8
1
1.2
10
phase
50
0
0
1
−10
−50
−30
−40
−50
Phase (deg)
0.8
magnitude
magnitude (dB)
−20
0.6
0.4
−100
−150
−200
−60
0.2
−250
−70
−80
−2
10
0
0
2
10
frequency (rad/s)
−2
10
10
10
F (s) =
(s + 1)2 (s + 10)
0
2
10
frequency (rad/s)
−300
10
0
2
10
frequency (rad/s)
10
Zoom
Im
0.05
0
#$
exact
0.6
−2
10
−0.05
−0.1
0.4
−0.08
−0.06
−0.04
−0.02
“by hand”
0
Re
Im
0.2
()
← Zoom
0
! % *!
! % (!
! %&'
!"
−0.2
−0.4
−0.6
−0.2
0
0.2
0.4
0.6
Re
0.8
1
Lanari: CS - Stability - Nyquist
Sunday, November 9, 2014
1.2
important to determine that this
intersection is on the right of -1
11
phase
0
0
1
−50
−30
−100
Phase (deg)
0.8
−20
Magnitude
Magnitude (dB)
−10
0.6
0.4
−40
−200
−250
−300
0.2
−50
−150
−350
−60
−2
10
0
0
2
10
frequency (rad/s)
10
−2
10
0
2
10
frequency (rad/s)
−10(s − 1)
F (s) =
(s + 1)2 (s + 10)
−2
10
10
0
10
frequency (rad/s)
2
10
Zoom
0.2
0.15
0.1
0.05
Im
1
exact
#$
0
−0.05
−0.1
“by hand”
−0.15
−0.2
0.5
−0.25
−0.1
−0.05
0
Re
0.05
0.1
← Zoom
Im
()
0
! % *!
! % (!
! %&'
!"
−0.5
−1
−0.5
0
0.5
Re
Lanari: CS - Stability - Nyquist
Sunday, November 9, 2014
1
important to determine that this
intersection is on the right of -1
12
phase
10
0
2
−50
−10
−20
Phase (deg)
1.5
Magnitude
Magnitude (dB)
0
1
−100
−150
−200
0.5
−30
−250
−40
0
−2
10
0
10
frequency (rad/s)
2
F (s) =
s−1
2
−2
10
10
0
−2
2
10
frequency (rad/s)
10
10
0
2
10
frequency (rad/s)
10
exact
unstable open-loop system
1
Ncc = nF+ = 1
Im
0.5
0
ω1
ω2
−0.5
Nyquist criterion is
verified: closed-loop system
is asymptotically stable
−1
Sunday, November 9, 2014
increasing !
ω3
ω4
−2
Lanari: CS - Stability - Nyquist
ω7
ω6
ω5
−1.5
−1
Re
−0.5
0
13
Let’s remove the hypothesis of no open-loop poles on the imaginary axis (i.e. with Re[.] = 0)
open-loop poles on the imaginary axis (i.e. with Re[.] = 0) come from:
•
•
one or more integrators (pole in s = 0)
resonance (imaginary poles in s = +/- j!n)
and give a discontinuity in the phase
• passing from ¼/2 to -¼/2 when ! switches from 0- to 0+
• or from 0 to ¼ when ! switches from !n- to !n+
while the magnitude is at infinity
In order to obtain a closed polar plot, we introduce closures at infinity which consists in
rotating of ¼ clockwise with an infinite radius (for every pole with Re[.] = 0) for growing
frequencies, at those values of the frequency corresponding to singularities of the transfer
function F (s) lying on the imaginary axis (poles of the open-loop system with Re[.] = 0)
! = 0-
! = 01
F (s) =
s(s + 1)
Lanari: CS - Stability - Nyquist
Sunday, November 9, 2014
R = +∞
! = -∞
! = +∞
! = 0+
closure
at infinity
! = 0+
14
closures at infinity
K
F (s) =
s(1 + τ1 s)
¼ clockwise at infinity from ! = 0- to ! = 0+
K
F (s) = 2
s (1 + τ1 s)
2¼ clockwise at infinity from ! = 0- to ! = 0+
K(1 + τ2 s)
F (s) = 3
s (1 + τ1 s)
3¼ clockwise at infinity from ! = 0- to ! = 0+
K
F (s) = 2
(s + ω12 )(1 + τ1 s)
¼ clockwise at infinity from ! = -!1- to ! = -!1+
K
F (s) = 2
(s + ω12 )2 (1 + τ1 s)
2¼ clockwise at infinity from ! = -!1- to ! = -!1+
¼ clockwise at infinity from ! = !1- to ! = !1+
2¼ clockwise at infinity from ! = !1- to ! = !1+
¼ clockwise at infinity from ! = -!1- to ! = -!1+
K(1 + τ2 s)
F (s) = 2 2
s (s + ω12 )(1 + τ1 s)
Lanari: CS - Stability - Nyquist
Sunday, November 9, 2014
2¼ clockwise at infinity from ! = 0- to ! = 0+
¼ clockwise at infinity from ! = !1- to ! = !1+
15
40
0
20
Phase (deg)
Magnitude (dB)
−50
0
−20
100
F (s) =
s(s + 10)2
−100
−150
−200
−40
−250
exact
approx
−60 −2
10
exact
approx
0
10
frequency (rad/s)
−300 −2
10
2
10
0
10
frequency (rad/s)
2
10
Zoom
0.3
)
! %&'
0.2
#$
0.1
Im
the zoom is just to show that
the phase goes to -3¼/2
0
−0.1
−0.2
2
−0.25 −0.2 −0.15 −0.1 −0.05
Re
0
0.05
1.5
1
+
Ncc = nF = 0
)*
! % (!
! % )!
0.5
Im
← Zoom
!"
0
¼ clockwise with
infinite radius
from 0- to 0+
−0.5
−1
−1.5
−2
−0.5
0
0.5
1
Re
Lanari: CS - Stability - Nyquist
Sunday, November 9, 2014
(
! %&'
16
40
1
one pole in +j
F (s) =
(s + 1)(s2 + 1) one pole in -j
magnitude (dB)
20
0
*
! %&'
−20
#$
*
! %&('
−40
−60 −2
10
−1
10
0
10
frequency (rad/s)
1
10
2
10
('
! % *!
! %&)
!"
! % (!
0
Phase (deg)
−50
−100
! %&'(
−150
! %&('(
−200
−250
exact
approx
−300 −2
10
−1
10
0
10
frequency (rad/s)
Lanari: CS - Stability - Nyquist
Sunday, November 9, 2014
1
10
2
10
¼ clockwise with infinite radius from -1- to -1+
¼ clockwise with infinite radius from 1- to 1+
17
40
0
20
Phase (deg)
Magnitude (dB)
−50
0
−20
−100
−150
−200
−40
−250
exact
approx
−60 −2
10
0
−300 −2
10
2
10
frequency (rad/s)
10
0
10
frequency (rad/s)
2
10
¼ clockwise with
infinite radius
from 0- to 0+
Zoom
0.1
s2 + 100
F (s) =
s(s + 1)(s + 10)
0.05
Im
)
! %&'
0
#$
−0.05
8
−0.1
−0.1
6
−0.05
0
Re
0.05
0.1
! % )!
4
Im
2
)*
← Zoom
0
!"
−2
! % (!
−4
−6
−8
−8
−6
−4
−2
Re
0
2
4
(
Lanari: CS - Stability - Nyquist
Sunday, November 9, 2014
! %&'
18
40
exact
approx
0
20
for K = 1 plot
crosses (-1, 0)
0
Phase (deg)
magnitude (dB)
−50
−20
−100
−150
−π
−200
−40
−250
exact
approx
−60 −2
10
0
10
frequency (rad/s)
−300 −2
10
2
10
0
2
10
frequency (rad/s)
10
Zoom
0.1
(
! %&'
Im
0.05
#$
0
−0.05
8
6
−0.1
−0.1
−0.05
0
Re
0.05
0.1
4
Im
2
K(s + 1)
F (s) =
s(s/10 − 1)
← Zoom
0
−2
)*+,
! % )!
! % (!
!"
−4
−6
−8
−8
−6
−4
−2
Re
0
2
Lanari: CS - Stability - Nyquist
Sunday, November 9, 2014
4
¼ clockwise with
infinite radius
from 0- to 0+
)
! %&'
19
40
1
F1 (s) =
s(s + 1)
30
2
Magnitude (dB)
20
2
−100
10
0
−10
1
F2 (s) = 5
s (s + 1)
−20
−30
−40 −2
10
−1
10
0
10
frequency (rad/s)
1
10
−600 −2
10
! %&'
Lanari: CS - Stability - Nyquist
Sunday, November 9, 2014
−1
10
5 times ¼ clockwise with
infinite radius
)
from 0- to 0+
! %&'
#$
(
−300
−500
2
! %&'
! % )!
! % (!
−200
−400
10
)
)*
F1
F
0
Phase (deg)
F1
F
!"
)*
0
10
frequency (rad/s)
1
10
2
10
#$
! % )!
! % (!
!"
(
! %&'
20
general negative feedback
+
+
F1(s)
-
F1(s)F2(s)
for stability these two
schemes are equivalent
-
F2(s)
F1(s) = N1(s)/D1(s)
F2(s) = N2(s)/D2(s)
W1 (s)
=
F1 (s)
1 + F1 (s)F2 (s)
=
N1 (s)D2 (s)
D2 (s)D1 (s) + N1 (s)N2 (s)
W2 (s)
=
F1 (s)F2 (s)
1 + F1 (s)F2 (s)
=
N1 (s)N2 (s)
D2 (s)D1 (s) + N1 (s)N2 (s)
same denominator
same poles
same stability properties
Lanari: CS - Stability - Nyquist
Sunday, November 9, 2014
21
Typical pattern for a control system:
open-loop system with no positive real part poles nF+ = 0, therefore the closed-loop system
will be asymptotically stable if and only if the Nyquist plot makes no encirclements around
the point (-1, 0). We want to explore how the closed-loop stability varies as a gain K in the
open-loop system increases.
! = 0-
+
Im
K F (s)
As K increases over a critical value
-1
! = +∞
the closed-loop system goes from
asymptotically stable to unstable
Re
! = -∞
as K
increases
! = 0+
Lanari: CS - Stability - Nyquist
Sunday, November 9, 2014
22
In this context, the proximity to the critical point (-1, 0) is an indicator of the proximity of
the closed-loop system to instability.
We can define two quantities:
! = 0-
gain margin kGM
If we multiply F (j!) by the quantity
1/kGM
kGM the Nyquist diagram will pass
through the critical point
the gain margin kGM is the smallest
! = +∞
-1
amount that the closed-loop system can
tolerate (strictly) before it becomes
unstable
Im
Re
!¼
F (j!)
kGM F (j!)
ωπ : ∠F (jωπ ) = −π
kGM
1
=
|F (jωπ )|
kGM |dB = −|F (jωπ )|dB
! = 0+
only positive angular
frequencies are shown
Lanari: CS - Stability - Nyquist
Sunday, November 9, 2014
23
phase margin PM
Im
the phase margin PM is the amount of
lag the closed-loop system can tolerate
(strictly) before it becomes unstable
!c angular frequency at which the gain is unity
is defined as crossover frequency
(or gain crossover frequency)
ωc :
|F (jωc )| = 1
ωc :
|F (jωc )|dB = 0 dB
P M = π + ∠F (jωc )
Lanari: CS - Stability - Nyquist
Sunday, November 9, 2014
! = +∞
-1
Re
PM
F (j!c)
F (j!)
24
(B) same gain margin as (A) but different phase margin
Im
(C) same phase margin as (A) but different gain margin
1/kGM
! = +∞
-1
Im
Re
PM
real
“distance”
(B)
Re
(C)
(A)
F (j!)
Lanari: CS - Stability - Nyquist
Sunday, November 9, 2014
25
stability margins on Bode
- kGM|dB
kGM |dB = −|F (jωπ )|dB
Magnitude (dB)
20
P M = π + ∠F (jωc )
0
−20
−40
−60 −1
10
ωc
0
10
ωπ
1
10
frequency (rad/s)
2
10
1000
F (s) =
s(s + 10)2
3
10
PM
ωc
0
ωπ
0.4
−90
0.2
−180
Im
Phase (deg)
0.6
−270
0
−0.2
−1
10
0
10
1
10
frequency (rad/s)
2
10
3
10
−0.4
−0.6
−1.2
Lanari: CS - Stability - Nyquist
Sunday, November 9, 2014
−1
−0.8 −0.6 −0.4 −0.2
Re
0
0.2
26
Magnitude (dB)
20
500
F1 (s) =
s(s + 10)2
0
−20
−40 −1
10
6000
F1 (s) =
s(s + 10)2
F1(s)
F2(s)
0
1
these are scaled (by 0.5 and 6)
wrt the previous system
2
10
10
frequency (rad/s)
10
Phase (deg)
0
both have same phase
but different crossover
frequencies and therefore
different phase margins
−90
−180
−270 −1
10
0
1
positive phase margin
(and thus for this example Ncc = 0)
asymptotically stable
closed-loop system
Lanari: CS - Stability - Nyquist
Sunday, November 9, 2014
2
10
10
frequency (rad/s)
10
negative phase margin
(and thus for this example a non-zero Ncc)
both systems with nF+ = 0
unstable
closed-loop system
(suggested exercise: check with Routh)
27
Bode stability theorem
Let the open-loop system F (s) be with no positive real part poles (i.e. nF+ = 0) and such
that there exists a unique crossover frequency !c (i.e. such that | F (j!c) | = 1) then the
closed-loop system is asymptotically stable if and only if
the system’s generalized gain is positive
&
the phase margin (PM) is positive
1.5(1 − s)
(s + 1)(2s + 1)(0.5s + 1)
F (s) =
0
−20
0.5
−40
Im
Magnitude (dB)
1
Phase (deg)
−60
0
0
Ncc = nF+ = 0
−0.5
−90
−180
−270 −2
10
−1
−1
10
0
10
frequency (rad/s)
Lanari: CS - Stability - Nyquist
Sunday, November 9, 2014
1
10
2
10
−1
−0.5
0
0.5
1
1.5
Re
28
Bode stability theorem
•
stability margins are useful to evaluate stability robustness wrt parameters variations
(for example the gain margin directly states how much gain variation we can tolerate)
•
phase margin is also useful to evaluate stability robustness wrt delays in the feedback
loop. Recall that, from the time shifting property of the Laplace transform, a delay is
modeled by e-sT and that
+
e-sT
-
F (s)
∠e−jωT = − ωT
|e−jωT | = 1
delay
of T sec
∠e−jωT = − ωT
a delay introduces a phase lag and therefore it can easily
“destabilize” a system (note that the abscissa in the Bode
diagrams is in log10 scale so the phase decreases very fast)
|e−jωT | = 1
a delay in the loop does not alter the magnitude
(0 dB contribution)
Lanari: CS - Stability - Nyquist
Sunday, November 9, 2014
29
Special cases
•
Im
infinite gain margin
-1
•
infinite phase margin
Im
-1
Lanari: CS - Stability - Nyquist
Sunday, November 9, 2014
Re
Re
30
Particular example
good gain and phase margins but close to critical point
0.38(s2 + 0.1s + 0.55)
F (s) =
s(s + 1)(s/30 + 1)(s2 + 0.06s + 0.5)
Magnitude (dB)
10
0
−10
1
−20
Im
0.5
0
Phase (deg)
0
−0.5
−90
−1
−180
0.01
0
10
frequency (rad/s)
1
10
−2
−1.5
−1
−0.5
Re
0
0.5
1
0.005
zoom to see the gain margin
Im
−1
10
0
−0.005
−0.01
−0.03
Lanari: CS - Stability - Nyquist
Sunday, November 9, 2014
−0.02
−0.01
Re
0
31