Flywheel in an all-electric propulsion system
advertisement

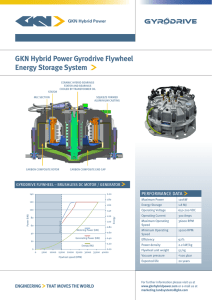
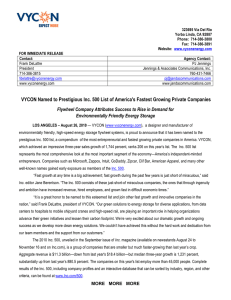
Flywheel in an all-electric propulsion system JOHAN LUNDIN Licentiate thesis UURIE: 328-11L ISSN: 0349-8352 Abstract Energy storage is a crucial condition for both transportation purposes and for the use of electricity. Flywheels can be used as actual energy storage but also as power handling device. Their high power capacity compared to other means of storing electric energy makes them very convenient for smoothing power transients. These occur frequently in vehicles but also in the electric grid. In both these areas there is a lot to gain by reducing the power transients and irregularities. The research conducted at Uppsala university and described in this thesis is focused on an all-electric propulsion system based on an electric flywheel with double stator windings. The flywheel is inserted in between the main energy storage (assumed to be a battery) and the traction motor in an electric vehicle. This system has been evaluated by simulations in a Matlab model, comparing two otherwise identical drivelines, one with and one without a flywheel. The flywheel is shown to have several advantages for an all-electric propulsion system for a vehicle. The maximum power from the battery decreases more than ten times as the flywheel absorbs and supplies all the high power fluxes occuring at acceleration and braking. The battery delivers a low and almost constant power to the flywheel. The amount of batteries needed decreases whereas the battery lifetime and efficiency increases. Another benefit the flywheel configuration brings is a higher energy efficiency and hence less need for cooling. The model has also been used to evaluate the flywheel functionality for an electric grid application. The power from renewable intermittent energy sources such as wave, wind and current power can be smoothened by the flywheel, making these energy sources more efficient and thereby competitive with a remaining high power quality in the electric grid. to instant coffee List of papers This thesis is based on the following papers, which are referred to in the text by their Roman numerals. I II III IV V VI VII J. Santiago, J. G. Oliveira, J. Lundin, A. Larsson, H. Bernhoff (2008) Losses in Axial-Flux Permanent-Magnet Coreless Flywheel Energy Storage Systems. Published in proceedings of the 18th International Conference on Electrical Machines (ICEM-08), Vilamoura, Portugal, 6-9 September, 2008, paper ID 910. J. Santiago, J. G. Oliveira, J. Lundin, J. Abrahamsson, A. Larsson, H. Bernhoff (2009) Design Parameters Calculation of a Novel Driveline for Electric Vehicles. Published in World Electric Vehicle Journal Vol. 3. J. G. Oliveira, J. Lundin, J. Santiago, H. Bernhoff (2010) A Double Wound Flywheel System under Standard Drive Cycles: Simulations and Experiments. Published in International Journal of Emerging Electric Power Systems. J. Abrahamsson, J. Santiago, J. G. Oliveira, J. Lundin, H. Bernhoff (2010) Prototype of electric driveline with magnetically levitated double wound motor. Published in proceedings of the 19th International Conference on Electrical machines (ICEM-19), Rome, Italy, 6-8 September 2010. J. Lundin, H. Bernhoff (2010) Flywheel as Power Handling Device in Electric and Hybrid Vehicles. Submitted to International Journal of Vehicular Technology, September 2010. J. Lundin, J. G. Oliveira, C. Boström, K. Yuen, J. Kjellin, M. Rahm, H. Bernhoff, M. Leijon (2011) Dynamic stability of an electricity generation system based on renewable energy. Accepted for publication in proceedings of the 21st International Conference on Electricity Distribution (CIRED 2011), Frankfurt, Germany, 6-10 June 2011. J. G. Oliveira, J. Lundin, H. Bernhoff (2011) Power balance control in an AC/DC/AC converter for regenerative braking in a flywheel based drive line system. Submitted to International Journal of Vehicular Technology, May 2011. Reprints were made with permission from the publishers. Contents 1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.1 The flywheel project at Uppsala university . . . . . . . . . . . . . . . . 1.2 History of flywheel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.3 Energy storage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.4 The electric grid . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.5 This thesis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 Theory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.1 Flywheel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.2 Vehicle movement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.2.1 Outer losses . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.2.2 Inner losses . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.3 Conversion between kinetic and electric energy - The electric machine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.4 Drive cycles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 Method . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.1 General description of the model . . . . . . . . . . . . . . . . . . . . . . . 3.2 Part 1 of model - Calculation of power needed for vehicle . . . . 3.3 Part 2 of model - Simulation of power fluxes in driveline . . . . . 4 Results and discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.1 Verification of concept . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.2 Benefits of a flywheel electric driveline . . . . . . . . . . . . . . . . . . 4.3 Comparison between two models describing a part of the flywheel electric driveline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.4 Flywheel as power handling device for renewable energy sources 5 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 Future work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 Summary of papers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 Sammanfattning på svenska . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9 Acknowledgements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11 11 12 13 14 15 17 17 18 20 21 21 22 25 25 25 26 29 29 29 31 33 37 39 41 45 47 49 Nomenclature Ef Ev J ω mf mv mw ρf ρair r ro ri h Ptot Pacc Prot Pair Prr Ps v a n g ϕ Av Cw Crr [J = kgm2 /s2 ] [J = kgm2 /s2 ] [kgm2 ] [rad/s] [kg] [kg] [kg] [kg/m3 ] [1.204 kg/m3 ] [m] [m] [m] [m] [W] [W] [W] [W] [W] [W] [m/s] [m/s2 ] [-] [9.81 m/s2 ] [-] [m2 ] [-] [-] Energy in flywheel Energy in vehicle Moment of inerta Angular velocity (or rotational speed) Mass of flywheel Curb mass of vehicle Mass of wheel Density of rotating part of flywheel Density of air Radius Outer radius Inner radius Height/thickness of the flywheel Total power required for vehicle Linear acceleration power Rotational acceleration power Air resistance power Rolling resistance power Slope power Speed of vehicle Acceleration of vehicle Number of wheels Gravitational acceleration Slope of road in degrees Frontal area of vehicle Air drag coefficient Rolling resistance coefficient 9 I U R P ε εrms ΦB t N B Ac 10 [A] [V] [Ω] [W] [V] [V] [Wb = Vs] [s] [-] [T = Wb/m2 ] [m2 ] Current Voltage Resistance Electric power Induced electromotive force (or back EMF) rms-value of back EMF Magnetic flux Time Number of coils exposed to the same magnetic flux variation Magnetic field Area of the closed circuit in the magnetic field 1. Introduction Several of humanity’s great challenges are related to transportation and electricity generation. Energy storage is vital for both these sectors. It is crucial for vehicles to be able to go long distances non-stop, and for the electric grid to make it possible to supply, at every instant of time, exactly the amount of electricity demanded by millions of users connected to the grid. The environmental problems associated with these sectors are unfortunately severe. The delicate conditions for life that all flora and fauna slowly and continuously adapt to are threatened by immense emissions of carbon that has been out of the natural carbon cycle for millions of years [1], nitrogen that the engine of a vehicle or the combustion chamber of a coal power plant transforms from stable and non-reactive N2 , inaccessible to most natural processes, to the reactive forms N2 O or NO2 [2] and a variety of numerous small particles created in the combustion process about whose impact on environment and health we now little or nothing. Additionally oil, the fuel driving the transportation sector, is running out [3]. Effective energy storage is a way to drastically reduce many of the negative impacts of transportation and electricity generation. Flywheels can have a great importance in both these sectors, providing an opportunity to store energy and thereby smoothen the power. Both the transportation and the energy sectors are huge - not to say the least. Thus, there is a huge economic impact potential and at the same time the possibility of making the world a little better place. 1.1 The flywheel project at Uppsala university "The flywheel research group" at the Division of electricity, Uppsala university, is conducting research on an all-electric propulsion system with an electric flywheel as the central part. The main application is power smoothing in vehicles. The flywheel is placed in between the battery, which is assumed to be the main energy storage, and the traction motor in the driveline. The idea is that the sum of energy stored in the flywheel and the kinetic energy of the car should be relatively constant. This arrangement smoothens the power consumed or produced by the traction motor and thus protect the battery from experiencing the short but large power transients typical for vehicles. The main 11 components and connections of a flywheel all-electric propulsion system are shown in figure 1.1. Another application for energy storage and power smoothing is the electric grid where the flywheel would have the same power smoothing role as in a vehicle. Figure 1.1: A schematic overview of the flywheel all-electric propulsion system. The idea of a flywheel as power handling device in a vehicle is not new, see for example [4]. However, unlike flywheels previously studied, the flywheel examined in this thesis is equipped with double stator windings, as seen in figure 1.2. This allows it to simultaneously and independently charge or discharge both the traction motor and the energy storage at two different power and voltage levels. The two winding configuration also insulates the traction motor and the battery electrically from each other, acting like a protection barrier against voltage and current transients and overtones. The project has so far resulted in numerous papers and two licentiate theses, [5, 6]. The results are intended to be commercialized within the spin-off company Electric Line which is the owner of a worldwide patent for the double stator winding flywheel [7]. 1.2 History of flywheel The history of flywheel goes back thousands of years. The potter’s wheel and the spinning wheel are two examples where the flywheel, with its inertia, has converted a pulsating input power to a smooth output power. Flywheels can also be used in the opposite way, by converting a smooth input to an irregular output. Hydro power generators are examples of this. 12 Figure 1.2: A photo of the second prototype flywheel, described in paper II. The three phase configuration of the winding is visible since each phase have its own colour. The difference in number of turns for the both sets of windings can not be seen since the colour is the same for both the high voltage windings and the low voltage windings. The upper rotor has been removed to show the stator windings. In fact a mechanical flywheel is already used in almost every vehicle with internal combustion engine, mounted on the outgoing engine shaft to suppress the explosion impulses from the piston in each valve during combustion stroke. Another common flywheel application is as UPS (uninterruptible power supply) to prevent sensitive equipment or processes to be damaged by a power failure. For an overview of applications, see [8–11]. 1.3 Energy storage There are many different ways of storing energy, but few are suitable for mobile applications [12,13]. Basically the options for electric1 energy storage for vehicles available today are: • • • • Flywheels Batteries Ultracapacitors Fuel cells A comparison between the main advantages of these forms of energy storage, compared to each other one by one, is given in table 1.1. The main advantage of the flywheel over the three other storages available is its almost unlimited lifetime, in terms of cycles. It can also be produced in a harmless way by abundant materials easy to recycle. The flywheel does not produce any hazardous gases, radiation or other potentially dangerous emissions. 1 Electric energy storage is here defined as both input and output energy being in form of electricity; the storage itself could be in any form 13 Table 1.1: Comparison between four different ways of storing electric energy for mobile use. The advantages listed in the table are the advantages for the storage types in the rows are compared to the storage types in the columns. Flywheel Battery Ultracapacitor Fuel cell Flywheel — Battery -Energy density -Storage time -No moving parts -Energy density -Power density -Lifetime -Environment - -Power density -Efficiency -Materials used -Efficiency -Power density -Energy storage -Cost -Lifetime -Energy density -Storage time — -Energy storage -Energy density — Ultracapacitor Fuel cell -Power density Even though the energy density of a flywheel is lower than that of batteries - a complete flywheel system commercially available today would have an energy density of around 20 Wh/kg - there are no fundamental limits to significant increase. For example a new material with three times higher tensile strength would allow a three times higher rotational speed, increasing the energy density for the complete flywheel system by nine times - and so even the best batteries would be left behind. The drawback for the flywheel is mainly the self discharge time which is - at its very best - ten times higher than that of batteries, but more likely a thousand times higher [10]. For long time energy storage the flywheel is therefore not a good option at the time being. But low pressure operation (described in paper I) and magnetic bearings [14] can change the competitiveness for flywheels as an option even for long time energy storage. Batteries are almost four times more energy efficient than fuel cells, comparing the round-turn efficiency from electricity to electricity. The starting point would be the production of electricity in a power plant and the final point would be electricity available for the vehicle’s traction motor. While batteries have a round-turn efficiency of about 80%, fuels cells have a round-turn efficiency of only about 20% [15]. 1.4 The electric grid The electric grid is being held at a specific electrical frequency (50 Hz in Europe) with only small deviations allowed. The voltage is also kept at some well-defined constant levels (except for loss-related voltage drops), from 400 kV line-to-line voltage in the transmission lines of the backbone grid to the one phase voltage of 230 V, available in the household sockets. The 14 electrical frequency and voltage of the flywheel though is physically related, and thereby directly proportional, to the speed of the flywheel. It would be impossible to vary the energy at the same time as keeping the electrical frequency and the voltage constant, since the energy content of the flywheel is regulated by the speed. Thus the flywheel can not be directly connected to the grid for energy storage. It has to have some power electronics connected in between to adjust and control both frequency and voltage. 1.5 This thesis This thesis focuses on the system design of a flywheel based all-electric propulsion system for efficient energy use in vehicles (papers I-V and paper VII). It also deals with the positive effects flywheels can have on electric grid applications (paper VI). After this chapter, 1. Introduction, the theoretical background to this work is given in chapter 2. Theory. The theory from chapter 2 is used to create a simulation model presented in chapter 3. Method. Chapter 4. Results and discussion presents and discusses the results from the simulations made with the model described in chapter 3 and chapter 5. Conclusions concludes the work presented in chapter 4. Some interesting fields of research for the future are discussed in chapter 6. Future work. The papers constituting this thesis are summarized in chapter 7. Summary of papers. Finally the thesis is briefly encapsulated in Swedish in chapter 8. Sammanfattning på svenska. 15 2. Theory This chapter presents the physics behind flywheels, vehicle motion and the conversion between kinetic and electric energy in the electric machine. The chapter also gives a background to drive cycles. 2.1 Flywheel An electric flywheel is basically an electric machine with some extra weight on the rotor to increase the moment of inertia. The amount of stored energy depends on the rotational speed of the flywheel as well as the distribution of rotating mass (the moment of inertia), given by eq. 2.1. Eq. 2.1 is in fact an analogy to the energy stored in a translationally moving object, for example a car, given by eq. 2.5 on page 18. Moment of inertia in circular motion is somewhat the parallel to mass in linear motion. Ef = Jω 2 2 (2.1) where E f [J] is the energy stored in the flywheel, ω [rad/s] the angular velocity and J [kgm2 ] the moment of inertia around the principle axis of rotation, given by eq. 2.2. Z ro J= ri Z ro m f (x)xdx = 2πρ f h(r)r3 dr (2.2) ri where m f [kg] is the mass of the flywheel, ro [m] the outer radius and ri [m] the inner radius of the flywheel, ρ f [kg/m3 ] the density of the flywheel material and h [m] the height/thickness of the flywheel, in this equation depending on the radius. If the height of the flywheel is constant, i.e. the flywheel has the shape of a hollow cylinder, the moment of inertia is given by eq. 2.3. 1 J = πρ f h(ro4 − ri4 ) 2 (2.3) In the special case of a thin rim flywheel, the moment of inertia would then be given by eq. 2.4. 17 J= m f r2 2 (2.4) where r is the radius of the flywheel. A flywheel is basically dimensioned by its size and weight (what is often referred to as its form factor) and regulated by its rotational speed. The rotating part of the second prototype flywheel (see figure 1.2 on page 13) has a moment of inertia of 0.364 kgm2 . 2.2 Vehicle movement To run a vehicle is physically to overcome a number of losses. Without losses the car would need no net energy. The energy, Ev [J], stored in a translationally moving object, such as a car, is given by eq. 2.5. Ev = mv v2 2 (2.5) where mv [kg] is the mass of the vehicle and v [m/s] the speed of the vehicle. A vehicle, electric or conventional, travelling on a flat road has to overcome two resistance losses to keep the desired speed. Figure 2.1 shows the relation between the two resistance losses for a standard car (see table 2.1) at different speeds. Note that this figure does not include any power required for acceleration but shows the losses associated with cruising at a certain speed. The most important loss at low speed is the rolling resistance loss, as seen in the figure. At higher speed (above about 60 km/h) the air resistance loss is the predominant power loss growing fast as it is proportional to the cube of the speed of the vehicle1 . With these figures in mind the inefficiency of ordinary internal combustion engine vehicles is obvious, since they often consume even more fuel at low speed. Electric vehicles though follow the physically proper power consumption and therefore consume much less power at lower speed than at higher speed. To exemplify the great difference between the two a standard ICE (internal combustion engine) car with a gasoline2 consumption of 7 l/100 km at a constant speed of 80 km/h has a power consumption of 51 kW compared to around 10 kW for an electric car with an efficiency of 70 %. The theoretical "ideal" power consumption is around 7 kW as seen in figure 2.1. 1 However the energy needed to travel a certain distance is proportional to the square of the speed - and of course directly to the distance. 2 Thermal energy content of gasoline is around 33 MJ/l. 18 Power [kW] 20 15 10 5 0 0 20 40 60 Speed [km/h] 80 100 120 Figure 2.1: Power needed to overcome the two main resistance losses for a vehicle travelling on a flat road. The dashed line shows the rolling resistance power loss and the dotted line the air resistance power loss. The total power loss is shown by the solid line. For low speeds the rolling resistance losses are the predominant while for high speeds the air resistance account for most of the losses. Table 2.1: Data for vehicle used in simulations. Data from [16]. Curb mass of vehiclea) Mass of wheel Air drag coefficient Rolling resistance coefficient Frontal area of vehicle Tyre outer radius mv mw Cw Crr A ro 1181 kg 25 kg each 0.321 0.015 2.1 m2 0.309 m a) There are slightly different definitions of curb mass but in this thesis it is defined as the total mass of vehicle including fluids, standard equipment and a 75 kg driver, i.e. everything needed to propel the vehicle, but no extra load. Yet, the energy efficiency of the electric car heavily depends on the power source. For example [17] claims that a battery electric vehicle is 3.56 times more efficient than a standard ICE vehicle. This is for the US electricity generation mix, consisting of 48% coal-power. The greatest advantage of electric vehicles over standard ICE vehicles occurs in urban driving, with many accelerations, brakings, starts and stops. In urban areas the reduction of emissions is also most valuable since the local health effects of emissions can be more important than the global environmental effects [18, 19]. The physical laws governing the losses during motion of an electric vehicle can be divided in two main groups; outer losses that define how much power is needed in the wheels of the vehicle and inner losses that determine how much power the energy storage will have to supply and where the losses are occurring and therefore have to be taken care of. In addition to these losses, 19 energy is used to run auxiliary devices such as air condition, lights et.c. which adds to the total power consumption. 2.2.1 Outer losses The predominant outer losses are acceleration loss, slope resistance loss, air resistance loss and rolling resistance loss. Standard drive cycles assume flat and straight roads so the slope resistance loss will not be active in the model (it will be set to zero). However, slope resistance loss is implemented in the model to enable the use in a real drive pattern. The total power required to propel the vehicle, Ptot [W], is then given by eq. 2.6. Ptot = Pacc + Prot + Ps + Pair + Prr (2.6) where Pacc [W] is the linear acceleration power, Prot [W] the rotational acceleration power, Ps [W] the slope power, Pair [W] the air resistance power and Prr [W] the rolling resistance power. These five terms can be evolved according to eq. 2.7-2.11. Pacc = mv · v · a Prot ri2 n 1+ 2 = mw · v · a · 4 ro Ps = m · v · g · sinϕ Pair = 1 · Av · v3 · ρair · Cw 2 Prr = m · v · Crr · g (2.7) (2.8) (2.9) (2.10) (2.11) where mv [kg] is the mass of the vehicle, v [m/s] the speed of the vehicle, a [m/s2 ] the acceleration of the vehicle, mw [kg] the mass of each wheel, n [-] the number of wheels, g [9.81 m/s2 ] the gravitational acceleration, ϕ [-] the slope of the road in degrees, Av [m2 ] the frontal area of the vehicle, Cw [-] the air drag coefficient and Crr [-] the rolling resistance coefficient. The first three terms in eq. 2.6, Pacc , Prot and Ps , are not really losses but rather the conversion rate between two "reusable" forms of energy, for example from chemical energy in the battery to kinetic energy of the vehicle or 20 from kinetic to potential energy of the vehicle. Therefore these three terms can also be negative, i.e. power is gained. The two last terms though, Pair and Prr , are losses in the meaning that energy is converted to some kind of useless energy, for example heat, wind turbulence and wearing of tyres. 2.2.2 Inner losses For an electric vehicle inner losses consist mainly of electrical losses which occur in all electric parts where a current is passing through and causes resistive losses. Electrical losses are basically governed by Ohm’s law (eq. 2.12), which states that a load connected to two points causes a current flowing through the resistance which is directly proportional to the voltage difference between the points and inversely proportional to the resistance in the load. The load is not necessarily a useful load. All cables, diodes and other current conducting apparatus have resistances which causes losses and a continuous voltage drop over them. Since the electrical power is described by eq. 2.13 these losses are proportional to the square of the current, according to eq. 2.14. The bearing loss in the flywheel would also be part of inner losses, but mechanical. In the model it is set to a constant value. I= U R (2.12) P = U ·I (2.13) P = I2 · R (2.14) where I [A] is current, U [V] voltage, R [Ω] resistance and P [W] electric power. 2.3 Conversion between kinetic and electric energy The electric machine An electric machine converts energy from electric to kinetic (motor) or the other way around (generator). The principle for both directions of energy conversion is the same, and thus governed by the same laws. Faraday’s law (eq. 2.15) states that the induced electromotive force ε [V], also called back emf, in a closed circuit is proportional to the time rate of change of the magnetic flux ΦB [Wb = Vs] through the circuit. 21 ε =− dΦB dt (2.15) The rms-value of the back emf (εrms ) is given by eq. 2.16: εrms = NωBAc √ 2 (2.16) where N [-] is the number of turns of identical coils exposed to the same magnetic flux variation, ω [rad/s] is the angular velocity, B [T] is the magnetic field and Ac [m2 ] is the area of the closed circuit in the magnetic field. An electric motor can run in four basic different modes, consisting of the combination of the two directions of rotation (forward and backward) and the two possible ways to change the rotational direction in time (acceleration or deceleration). The four modes, seen in table 2.2, can be controlled by two parameters. The phase shift between voltage and current decides whether the motor is accelerating or braking, and the sequence of phases decides the direction of rotation. Table 2.2: Four modes of operation of an electric motor with possible control. Forward Backward 2.4 Acceleration Deceleration U and I in phase phase sequence a, b, c U and I in phase phase sequence a, c, b 180◦ phase shift between U and I phase sequence a, b, c 180◦ phase shift between U and I phase sequence a, c, b Drive cycles Drive cycles are used to have a common reference point in various contexts. Some are standardized and used for compulsory testing before a new vehicle is allowed to be put on the market. The tested entities are often fuel consumption and emissions of some chemical compounds. The outcome of these tests provide the basis for decision making for the buyer of the vehicle, and also the basis for a classification as an "environmentally friendly vehicle" which can have great impact on the economical conditions such as motor vehicle taxes and taxable benefit. A certain drive cycle is often given per time unit, either as acceleration (for example NEDC - the New European Drive Cycle [20], see figure 2.2) or as speed (for example the North American FTP 75 [21], see figure 2.3). Practi22 cally the vehicle is tested with a driver that drives the vehicle on a dynamometer in the lab and tries to follow the drive cycle as accurately as possible. However, it is not evident that standard drive cycles reflects reality in a proper way. There are two main reasons for this. The drive cycles differ too much from real-world driving behaviour and the tested vehicles are new in contrary to the average vehicle in traffic. Both these matters significantly affects the fuel consumption and the emissions measured in a lab in comparison to real-world data. [22] discusses this problem thoroughly. 120 Speed [km/h] 100 80 60 40 20 0 0 200 400 600 Time [s] 800 1000 1200 Figure 2.2: Speed vs time in the European drive cycle NEDC. The total time for the drive cycle is 1180 s. Speed [km/h] 100 80 60 40 20 0 0 200 400 600 800 Time [s] 1000 1200 1400 Figure 2.3: Speed vs time in the American drive cycle FTP 75. The total time for the drive cycle is 1372 s. 23 3. Method The results in this thesis are achieved with a model, implemented in Matlab, and based on the theory described in the previous chapter. The model consists of two parts, following each other in time. The simulation is divided into arbitrary small time steps (typically tenths of a second) and in each of them all required calculations are made and the results added to an array. The time steps are equally small in both parts. The model is described in more detail in paper V. 3.1 General description of the model In the first part, the power needed in the traction motor is calculated. The vehicle is considered "a black box" in the sense that only what is happening outside the vehicle is relevant, i.e. the outer losses. In the second part the power calculated in the first part is used to simulate the power fluxes in different parts of the driveline and also the resulting speed of the flywheel. In this part the system simulated is moved into the vehicle, i.e. the inner losses. There are multiple options for the choice of drive cycle, control strategy, configuration of driveline and loss function for every part of the driveline. The model can be used to test, evaluate and compare all possible interesting combinations of these variables. 3.2 Part 1 of model - Calculation of power needed for vehicle The first part of the model calculates the power needed to propel a vehicle according to a certain drive cycle. For this purpose, eq. 2.6-2.11 from the theory chapter are used. The main input data to part 1 of the model is: • Vehicle data such as front area and mass (see table 2.1 on page 19) • Natural constants/values such as gravitational constant and air density • Drive cycle data (time and speed/acceleration) 25 The main output data from part 1 of the model is: • Power needed in the traction motor 3.3 Part 2 of model - Simulation of power fluxes in driveline In the second part of the model the simulation of power fluxes in the driveline starts over from the beginning of the drive cycle with focus on power fluxes inside the vehicle. For these simulations equations used from the theory chapter are eq. 2.1, 2.2, 2.5, 2.13 and 2.16. The main input data to part 2 of the model is: • Power (from part 1) • Control strategy • Configuration of driveline The control strategy defines how much power the flywheel shall demand from the battery. In these simulations the battery is assumed to deliver a constant amount of power which equals the average power needed for the complete drive cycle. This control strategy is the ideal for the battery though very difficult to achieve in real life as it requires the average power for the complete drive cycle which of course is not known in advance, except for in the lab. However, there are ways of controlling the battery power quite close to constant power with modest and slow power changes. The configuration of driveline refers to which parts the driveline is built up with. Two drivelines are simulated, one with a flywheel (figure 3.1) and one without a flywheel (figure 3.2). Figure 3.1: Model of the driveline with a flywheel. Positive power direction is from the battery to the traction motor. The main output data from part 2 of the model is: • Power flux in every part of the driveline • Power loss in every part of the driveline • Energy stored in battery, flywheel and vehicle 26 Figure 3.2: Model of the driveline without a flywheel. Positive power direction is from the battery to the traction motor. In the simulations of this thesis the power loss in the driveline components are assumed to be directly proportional to the input power, calculated as a percentage of the input power. 27 4. Results and discussion In this section the main results from the papers included in the thesis are presented and discussed. 4.1 Verification of concept The concept of an electric driveline with a double-wound two voltage level flywheel is presented and verified in paper II. Paper III shows, in both simulations and experiments, that the flywheel smoothens the input power compared to the output power with robust controlling and a low level of harmonic content of both voltage and current. Paper I presents an axial-flux electric machine with low idle losses and a reduction of air resistance losses for a flywheel rotating in a low pressure chamber. 4.2 Benefits of a flywheel electric driveline Paper V demonstrates the benefits of introducing a flywheel into an electric driveline. The comparison is made between two drivelines, one with a flywheel and one without a flywheel (see figures 3.1 and 3.2 on page 26), for two different drive cycles, the NEDC and the FTP 75 (see figures 2.2 and 2.3 on page 23). The maximum power flux from the battery, and thereby also the peak currents, decreases by 91% for both drive cycles in the flywheel driveline, from 47.8 kW and 208 A to 4.49 kW and 19.5 A for the NEDC and from 42.1 kW and 183 A to 3.63 kW and 15.8 A for the FTP 75 (assuming a battery voltage of 230 V DC). The resistive losses in the battery decreases by 70%, from 404 to 119 Wh for the NEDC and from 454 to 138 Wh for the FTP 75. The total losses in the complete driveline are lower in the flywheel driveline, despite the losses in the components introduced in the flywheel driveline. The decrease in total losses is 18% (133 Wh) for the NEDC and 24% (201 Wh) for the FTP 75. The number of partial charge/discharge cycles decreases from 36 (NEDC) and 118 (FTP 75) without a flywheel to only 1 with a flywheel. The effective flywheel storage capacity (the range of the energy content in the flywheel between the minimum and maximum value) is 648 Wh (NEDC) and 312 Wh 29 (FTP 75), giving a total flywheel storage capacity of 864 Wh for the NEDC and 416 Wh for the FTP 751 . The power flux in the battery and the flywheel respectively in a flywheel driveline for the two drive cycles simulated are shown in figures 4.1 and 4.2. The energy stored in the battery and the flywheel respectively for the same flywheel driveline for the two drive cycles simulated are shown in figures 4.3 and 4.4. 50 Power [kW] 40 30 20 10 0 −10 0 200 400 600 Time [s] 800 1000 1200 Figure 4.1: Power flux in the battery with flywheel (dashed line) and without flywheel (solid line) for a vehicle performing a NEDC drive cycle. Positive power means that power is taken out from the battery. From paper V. Power [kW] 40 30 20 10 0 −10 0 200 400 600 800 Time [s] 1000 1200 Figure 4.2: Power flux in the battery with flywheel (dashed line) and without flywheel (solid line) for a vehicle performing a FTP 75 drive cycle. Positive values means that power is taken out from the battery. From paper V. Paper IV presents how the energy density of the complete flywheel driveline is higher than for the same driveline without a driveline. This is due to the shift from high power density batteries (100 Wh/kg) to high energy density batteries (150 Wh/kg). Paper IV also gives an example of what this difference in energy density could mean in real-life. The flywheel in this system is assumed to weigh 35 kg with an energy storage capacity of 0.5 kWh which is 1 The flywheel is assumed to use 75% of its total energy stored, which implies a practical speed range of half the total speed range (from half maximum speed to maximum speed). 30 120 100 2 80 1.5 60 40 1 20 0.5 0 200 400 600 Time [s] 800 1000 Speed of vehicle [km/h] Energy stored [kWh] 2.5 1200 Figure 4.3: Energy in flywheel (solid line) and battery (dashed line) on the left axis and speed of the vehicle on the right axis for a vehicle performing a NEDC drive cycle. From paper V. 80 1.5 60 40 1 20 0.5 0 200 400 600 800 Time [s] 1000 1200 Speed of vehicle [km/h] Energy stored [kWh] 100 2 1400 Figure 4.4: Energy in flywheel (solid line) and battery (dashed line) on the left axis and speed of the vehicle on the right axis for a vehicle performing a FTP 75 drive cycle. From paper V. reasonable for a car. Given a total amount of energy of 20 kWh to be stored in the car the use of a flywheel together with high energy density batteries would reduce the total weight of the propulsion system by 20% (45 kg) compared to a system with high power batteries, capable of supplying the power needed but with a lower energy density. The energy density of the combined system would be 25% higher (113 compared to 90 Wh/kg). These figures are based on a FTP 75 drive cycle. The benefits are summarised in table 4.1. 31 Table 4.1: Comparison between an all-electric propulsion system with and without a flywheel. From paper V and paper IV Peak power Peak current Battery losses . Total losses Number of partial charge/ discharge cycles Total flywheel storage capacity needed Total weight Useful energy density NEDC FTP 75 NEDC FTP 75 NEDC FTP 75 NEDC FTP 75 NEDC FTP 75 NEDC FTP 75 FTP 75 FTP 75 No flywheel Flywheel Change 47.8 kW 42.1 kW 208 A 183 A 404 Wh 454 Wh 727 Wh 827 Wh 36 118 – – 222 kg 90 Wh/kg 4.49 kW 3.63 kW 19.5 A 15.8 A 119 Wh 138 Wh 594 Wh 626 Wh 1 1 864 416 178 kg 113 Wh/kg -91% -91% -91% -91% -70% -70% -18% -24% -97% -99% – – -20% +25% 4.3 Comparison between two models describing a part of the flywheel electric driveline In paper VII two models for simulating the high voltage side of the driveline have been compared for a short (5 s) braking drive cycle (see to the left in figure 1.1 on page 12 and to the left in figure 3.1 on page 26). The first model, implemented in Simulink, simulates every component on a high level of detail. The other model, implemented in Matlab by the author, was described earlier in the thesis. This model does not go into the detailed component level but has the advantage of being able to simulate drive cycles of several hours for the complete driveline. Results show very good agreement between the two models, giving concordance correlation coefficients (rc ) [23] between 0.956 and 0.989 for the three simulated variables, voltage level in capacitor (figure 4.5), speed of traction motor (figure 4.6) and speed of flywheel (figure 4.7). However, the Matlab model consequently simulates the capacitor voltage in the first AC/DC/AC converter to be higher and the speeds of the traction motor and the flywheel to be lower than for the Simulink model. The discrepancies are probably due to the different levels of complexity of the two models. Paper VII also indicates that regenerative braking can be performed with very high efficiency (92%) utilising the flywheel’s great power capacity. 32 DC voltage [V] 310 300 290 280 270 260 250 0 0.5 1 1.5 2 2.5 Time [s] 3 3.5 4 4.5 5 Rotational speed [rpm] Figure 4.5: DC voltage in AC/DC/AC converter simulated with Matlab model (solid line) and Simulink model (dashed line). The concordance correlation coefficient rc is 0.956. From paper VII. 600 500 400 300 0 0.5 1 1.5 2 2.5 Time [s] 3 3.5 4 4.5 5 Rotational speed [rpm] Figure 4.6: Rotational speed of traction motor in AC/DC/AC converter simulated with Matlab model (solid line) and Simulink model (dashed line). The concordance correlation coefficient rc is 0.989. From paper VII. 5000 4900 4800 4700 0 0.5 1 1.5 2 2.5 Time [s] 3 3.5 4 4.5 5 Figure 4.7: Rotational speed of flywheel in AC/DC/AC converter simulated with Matlab model (solid line) and Simulink model (dashed line). The concordance correlation coefficient rc is 0.970. From paper VII. 4.4 Flywheel as power handling device for renewable energy sources The potential role of a flywheel as power handling device in the electric grid has been investigated in paper VI. Simulations show a great increase in the smoothness of the power output from intermittent energy sources such as wave, wind and current power (see figure 4.8). However, the flywheel size needed to achieve such an enhancement is considerable. The benefits for a lin33 ear wave power generator are greater than for wind and current power which already generate a sinusoidally shaped voltage. Figure 4.8: Photos of wave, wind and current power generators developed at the Division of electricity, Uppsala university. a) one of the wave energy converters installed at the Lysekil research site. b) A 12 kW vertical axis wind turbine in Marsta outside Uppsala. c) Laboratory marine current generator. From paper VI. The peak power from a wave power plant is reduced by a factor of ten using even a quite small flywheel (50 kJ effective energy storage), as shown in figure 4.9 and 4.10. The average power from the wave power generator in this simulation (VI) is 1.28 kW . Thus this flywheel has an average storage time of 39 seconds while a 500 kJ flywheel has an average storage time of 390 s. However the plateau of the red line in figure 4.10 after approximately 6 minutes of simulation indicates that the 50 kJ flywheel is too small to have the ability to control the output power. Calculations show that a flywheel with a storage capacity of 104 kJ would be the smallest possible to maintain the power outtake controllability. 20 Power [kW] 15 10 5 0 5 10 15 Time [min] 20 25 30 Figure 4.9: Power flux from a wave power plant with no flywheel (black line), with a 50 kJ flywheel (red line) and with a 500 kJ flywheel (blue line). From paper VI. 34 Power [kW] 2.5 2 1.5 1 0.5 0 5 10 15 Time [min] 20 25 30 Figure 4.10: Detail of figure 4.9. Power flux from a wave power plant with a 50 kJ flywheel (red line) and with a 500 kJ flywheel (blue line). The average power flux is shown by the black line. From paper VI. 35 5. Conclusion The papers presented in this thesis show that the concept of introducing a flywheel in to a conventional electric driveline has many potential advantages. The amount of batteries needed decreases significantly which means a lot in terms of cost but also weight and volume. The battery losses decrease making cooling systems cheaper, lighter and smaller. The propulsion system is highly likely to be more energy efficient with a flywheel than without one. The weight, volume and cost introduced to the vehicle by the flywheel is by far compensated by the advantages the flywheel brings to the system. To conclude the flywheel based all-electric propulsion system have a set of advantages that can be summarized as follows: • Battery can be optimized for energy density since the flywheel care for the power handling. This leads to a smaller amount of batteries needed • Battery efficiency increases since their charge and discharge power decreases • Battery lifetime is longer since the number of charge and discharge cycles decreases drastically, especially in urban driving • Battery can be optimized for discharging since charging normally does not occur during driving. Charging between driving occasions are made in a smooth and controlled way • High efficiency leads to low energy loss and less need for cooling • Vehicle performance enhances due to higher power capacity • Regenerative braking is efficiently accomplished by the flywheel • Fast charging is possible however limited by the size of the flywheel • Operation with flywheel as sole energy source is possible • Allows a robust all-electric propulsion system with few mechanical parts • Can be used with any kind of fuel, both conventional and future, as long as the main energy transmission is electric Two models describing the high voltage/high peak power side of the driveline, one complex and detailed Simulink model and one much more unembellished in Matlab have been implemented. The two models are matched allowing smooth and seamless transition between detailed small-scale and long large-scale simulations. Flywheels can also be beneficial for stationary use, i.e. connected to the electric grid to smoothen the power output from an intermittent energy source. 37 However, the size and cost of the flywheel needed to achieve this benefit is to be taken into account. 38 6. Future work For the author, future work will consist of further development of the Matlab model of the driveline in several ways: • Enhance the possibility of numerous configurations of the driveline for simultaneous simulation and comparison • Refine the simulation of the losses in all parts of the driveline • Introduce the possibility of numerous control systems of the driveline for simultaneous simulation and comparison • Analyze the model statistically to find which parts of the driveline to focus on for highest rate of optimization The future work also includes the performance of various simulations: • Quantify the benefits for the battery introducing a flywheel into the electric driveline, shown in this thesis • Simulate different configurations and compare them • Simulate different control strategies and compare them • Compare the simulation results with experimental data from the bench test set-up For the flywheel research group as a whole the future work consists of finalising the current test set-up based on the third flywheel prototype, described in paper IV, perform measurements during realistic drive conditions and eventually place the driveline in a vehicle. 39 7. Summary of papers Paper I Losses in axial-flux permanent-magnet coreless flywheel energy storage systems This reviewed conference paper describes the design and construction of a small-scale axial-flux permanent-magnet motor. Mechanical and electrical losses are investigated by a spin-down test, with a emphasis on eddy current losses in the windings which are the main losses in a coreless flywheel. Measurements show good agreement with theory. The author participated in the construction and measurements for the paper and contributed to the writing. Published in proceedings of the 18th International conference on electrical machines, ICEM-08, in Vilamoura, Portugal, 6-9 September 2008. Paper II Design parameters calculation of a novel driveline for electric vehicles This paper presents the electric driveline based on a flywheel with two voltage levels and discusses the basic features and advantages of the driveline. Magnetic bearings, motor control and the main design parameters and equivalent circuit of a two voltage level machine are discussed. Finally results from tests made on a scaled test bench set-up are presented. The author’s contribution to the paper was the drive cycle simulations and the associated writing. Published in World Electric Vehicle Journal Vol. 3. Presented as poster by author in the 24th International battery, hybrid and fuel cell electric vehicle symposium and exhibition, EVS-24, in Stavanger, Norway, 13-16 May 2009. Paper III A double wound flywheel system under standard drive cycles: Simulations and experiments In this paper the functionality of the electric driveline is investigated. Different drive cycles are applied and the response of the speed control system 41 is simulated and measured in the experimental set-up. The results prove the functionality of the system. The author contributed to the paper by making the drive cycle simulations and some writing. Published in International Journal of Emerging Electric Power Systems, Vol. 11, Issue 4, 2010. Paper IV Prototype of electric driveline with magnetically levitated double wound motor This reviewed conference paper describes the complete bench test set-up of a flywheel-based electric driveline under construction. The driveline consists of lead-acid batteries, a DC/AC converter, a double wound, magnetically levitated electric machine, an AC/DC/AC converter and two motors. The former acting as the vehicle’s motor and the latter working as a load. The paper also quantifies the benefits of introducing a flywheel in to an electric driveline. The author’s contribution to the paper were the drive cycle simulations and some of the analysis and writing. Published in proceedings of the 19th International conference on electrical machines, ICEM-10, in Rome, Italy, 6-8 September 2010. Paper V Flywheel as power handling device in electric and hybrid vehicles In this paper the flywheel-based all-electric propulsion system is studied from a system perspective. Simulations are made where two drivelines are compared - one with a flywheel and one without a flywheel. The simulations show the advantages of the flywheel based driveline, especially from a battery perspective. The maximum power fluxes as well as the maximum battery currents are decreased by more than an order of magnitude. The number of partial charge and discharge cycles decreases to one as the batteries are not exposed to the fluctuating powers at the driving wheels. The author performed all the simulations and analysis for this paper and made most of the writing and preparation. Submitted to International Journal of Vehicular Technology, September 2010. 42 Paper VI Dynamic stability of an electricity generation system based on renewable energy This reviewed conference paper presents the flywheel as a power handling device in renewable electricity production. Renewable power sources tend to be intermittent with stochastic variations in power production. A flywheel can be connected to one or several production units to smooth the output power to the grid. Simulations show that the power quality could greatly improve with a flywheel as the energy to be stored would be small. For longer storage times and larger amounts of energy the benefit of a flywheel would be less significant. The author made most of the simulations and the main part of the writing of the paper. Accepted to 21st International Conference on Electricity Distribution, CIRED 2011, in Frankfurt, Germany, 6-10 June 2011. Presented by author, orally and as poster. Paper VII Power balance control in an AC/DC/AC converter for regenerative braking in a flywheel based driveline This paper is focused on the function of regenerative braking in the proposed driveline. Two models describing the driveline between the traction motor and the flywheel, one quite simple in Matlab and one more detailed in Simulink, are simulating a drive cycle consisting of 5 s of braking, i.e. power is transmitted from the traction motor to the flywheel. Exactly the same power is taken out from the traction motor as is put in to the flywheel, leaving the capacitor in the AC/DC/AC converter to supply power for the losses. The one way efficiency of the regenerative braking system is around 92%. The two different models show a very good concordance, simulating the capacitor voltage, the flywheel speed and the wheel machine speed. The author made some of the simulations and contributed to the analysis of the results as well as the writing of the paper. Submitted to International Journal of Vehicular Technology, May 2011. 43 8. Sammanfattning på svenska Några av mänsklighetens största utmaningar finns inom transport- och energisektorn. Utmaningarna består framför allt av miljöproblem förknippade med utsläpp av fossil koldioxid, kväve och andra mer eller mindre okända ämnen som bildas vid förbränning. Effektiv energilagring skulle dock avsevärt kunna minska många av dessa problem. Författarens forskning är inriktad på systemaspekter på energilagring inom transportsektorn, närmare bestämt på ett svänghjul som effekthanterare i ett eldrivet fordon. Ett stort problem för dagens batterier, som utgör den huvudsakliga energilagringen i elfordon, är de stora effektflödena som måste hanteras vid både acceleration och inbromsning. Lösningen är att introducera ett svänghjul i drivlinan som tar hand om dessa stora effektvariationer och låter batterierna få betydligt gynnsammare förutsättningar med en låg och relativt konstant belastning på mindre än en tiondel av den maxeffekt de skulle behöva leverera utan svänghjul. Ett svänghjulssystem med en vikt av ca 35 kg och en energilagringskapacitet på ca 0,5 kWh är rimligt för en vanlig personbil. Den viktökningen kompenseras mer än väl av att batterierna kan göras mycket energitätare och därmed väga mindre per lagrad kWh. För en personbil med en energilagringskapacitet på 20 kWh (som räcker till 15 mils landsvägskörning eller minst det dubbla i stadskörning) är den totala vikten för batterier och svänghjul och svänghjulssystem 20% lägre än motsvarande vikt för bara batterier utan svänghjul. Energitätheten är samtidigt 25% högre för drivlinan med svänghjul. Dessutom minskar förlusterna i batterierna med ca 70% vilket inte bara minskar energiförbrukningen utan också minskar kylbehovet av batterierna. De totala förlusterna för hela drivlinan minskar med ca 20%. Antalet upp- och urladdningscykler minskar drastiskt, från flera i minuten till endast en lång urladdning. Detta, tillsammans med de i övrigt gynnsamma förhållandena för batterierna, leder till att batteriernas livslängd ökar. Kontentan av att introducera ett svänghjul i den elektriska drivlinan är alltså att mängden batterier kan reduceras avsevärt samt att de håller längre. Detta medför lägre kostnad, mindre vikt och volym samt därmed också mindre miljöpåverkan. Dessutom minskar de totala förlusterna i systemet vilket minskar energiförbrukningen per mil och kylbehovet. Dessa resultat har uppnåtts genom ett av författaren konstruerat modellerings- och simuleringsprogram i Matlab där två elektriska drivlinor, 45 en med och en utan svänghjul, har modellerats, simulerats och jämförts för två olika standardiserade körcykler. Samma funktion som för elfordon kan svänghjulet ha också på elnätet för att jämna ut effekten från förnybara elproduktionsanläggningar såsom våg-, vind- eller strömkraftverk, vilket också har visats i simuleringar. Därmed kan också dessa anläggningar användas effektivare och bli mer konkurrenskraftiga samtidigt som den höga elkvaliteten på elnätet kan upprätthållas. 46 9. Acknowledgements I would first like to thank my supervisor Hans and my co-supervisor Mats for taking the initiative to this exciting project and for guiding me and my colleagues through it. Thanks to my project co-workers, Janaína, Juan, Johan and Magnus. You are always willing to help and encourage my work - but also to discuss life over a cup of wiener melange! I would also like to thank all lovely friends and colleagues at the Division of electricity that make all time at work a pleasure... well, almost all time! Magnus and Daniel are especially thanked for nice lunches and discussions about things quite far away from working matters. Thanks to Gunnel, Elin, Thomas, Ulf, Ingrid and Maria who guide me through the administrative work. Thanks to all of you introducing me to and helping me in the mysterious world of LaTeX. I owe you lifetime support to MS Office 2007! Thanks to Hans, Janaína and my father Tomas who proof-read, questioned and commented the thesis. Your comments were appreciated and valuable. Finally, thanks to my beloved family - Maja, Albin, Pelle, Tea and Anna who certainly make me feel alive 24/7! 47 References [1] Intergovernmental Panel on Climate Change. Third assessment report - climate change 2001 - the scientific basis. Technical report, GRID-Arendal, 2003. [2] Mark A. Sutton, Clare M. Howard, Jan Willem Erisman, Gilles Billen, Albert Bleeker, Peringe Grennfelt, Hans van Grinsven, and Bruna Grizzetti, editors. The European Nitrogen Assessment. Cambridge University Press, 2011. [3] Kjell Aleklett, Mikael Höök, Kristoffer Jakobsson, Michael Lardelli, Simon Snowden, and Bengt Söderbergh. The peak of the oil age - analyzing the world oil production reference scenario in world energy outlook 2008. Energy Policy, 38:1398–1414, 2010. [4] Paul P. Acarnley, Barrie C. Mecrow, James S. Burdess, J. Neville Fawcett, James G. Kelly, and Philip G. Dickinson. Design principles for a flywheel energy store for road vehicles. IEEE Transactions on Industry Applications, 32(6), 1996. [5] Juan de Santiago Ochoa. AFPM motor/generator flywheel for electric power stabilization. Licentiate thesis, Uppsala university, 2009. [6] Janaína Goncalves de Oliveira. Power control systems for PM synchronous flywheel alternators. Licentiate thesis, Uppsala university, 2009. [7] Mats Leijon, Hans Bernhoff, and Björn Bolund. U.S. patent 7768176, 2007. [8] Björn Bolund, Hans Bernhoff, and Mats Leijon. Flywheel energy and power storage systems. Renewable and Sustainable Energy Reviews, 11:235–258, 2007. [9] C.S. Hearn, M.M. Flynn, M.C. Lewis, R.C. Thompson, B.T. Murphy, and R.G. Longoria. Low cost flywheel energy storage for a fuel cell powered transit bus. In Vehicle Power and Propulsion Conference, Sept 9-12, 2007. VPPC 2007. IEEE, 2007. [10] D. Cross and J. Hilton. High speed flywheel based hybrid systems for low carbon vehicles. Technical report, Flybrid Systems LLP. [11] O. Briat, J.M. Vinassa, W.Lajnef, S. Azzopardi, and E. Woirgard. Principle, design and experimental validation of a flywheel-battery hybrid source for heavyduty electric vehicles. IET Electric Power Applications, 1:665–674, 2007. [12] Juan Dixon. Energy storage for electric vehicles. In IEEE International Conference on Industrial Technology (ICIT), 2010. 49 [13] Andrew F. Burke. Batteries and ultracapacitors for electric, hybrid, and fuel cell vehicles. Proceedings of the IEEE, 95(4), April 2007. [14] Johan Abrahamsson and Hans Bernhoff. Magnetic bearings in kinetic energy storage systems. submitted to Journal of Electrical Systems, 2011. [15] J. van Mierlo, G. Maggetto, and P. Lataire. Which energy source for road transport in the future? A comparison of battery, hybrid and fuel cell vehicles. Energy Conversion and Management, 47:2748–2760, 2006. [16] Concawe/EUCar. Tank-to-wheels report, version 3. Technical report, October 2008. [17] Jeremy Hackney and Richard de Neufville. Life cycle model of alternative fuel vehicles: emissions, energy, and cost trade-offs. Transportation Research Part A, 35:243–266, 2001. [18] Bengt Johansson and Max Åhman. A comparison of technologies for carbonneutral passenger transport. Transportation Research Part D, pages 175–196, 2002. [19] Georgios Fontaras, Panayotis Pistikopoulos, and Zissis Samaras. Experimental evaluation of hybrid vehicle fuel economy and pollutant emissions over real-world simulation driving cycles. Atmospheric Environment, 42:4023–4035, 2008. [20] European Council. Directive 70/220/eec, 1970. [21] U.S. Environmental Protection Agency. http://www.epa.gov/nvfel/methods/ftpcol.txt. [22] Karl Ropkins, Joe Beebe, Hu Li, Basil Daham, James Tate, Margaret Bell, and Gordon Andrews. Real-world vehicle exhaust emissions monitoring: Review and critical discussion. Critical Reviews in Environmental Science and Technology, 39:79–152, 2009. [23] Lawrence I-Kuei Lin. A concordance correlation coefficient to evaluate reproducibility. Biometrics, 45(1):255–268, Mars 1989. [24] Mehrdad Ehsani, Yimin Gao, Sebastien E. Gay, and Ali Emadi. Modern Electric, Hybrid Electric, and Fuel Cell Vehicles. CRC Press, 2005. 50